基于改进EEMD-MB1DCNN的船用柴油机缸套-活塞环故障诊断
2024-02-26王永坚范金宇蔡杭溪赵凯吴怡婷
王永坚,范金宇,蔡杭溪,赵凯,吴怡婷
(集美大学 轮机工程学院,福建 厦门 361021)
船用中高速柴油机广泛地用作各类船舶的发电柴油机,由缸套-活塞环(cylinder liner and piston rings, CLPRs)组成的摩擦副是柴油机的核心部件和易损件。CLPRs长时间在高温、高压、重载等恶劣环境下工作,极易发生缸套过度磨损、活塞环断环等故障问题,其技术状态对柴油机的工作性能与使用寿命将产生重大影响。
卷积神经网络(CNN)[1]的理论研究和网络深度已发展到深度卷积神经网络(deep convolutional neural network, DCNN),并在图像识别、机械故障诊断领域得到广泛地应用。考虑通过测取人为设置缸套-活塞环4种故障状态(正常状态、活塞环断环1道、缸套过度磨损+0.25 mm、缸套过度磨损+0.50 mm,以下简称“4种故障状态”),在不同负载状态下的振动信号,提出一种基于信息质量筛选准则EEMD分解后的k个固有模态分量IMFs,以期有效体现故障特征的峭度(越大越好)作为衡量指标,对IMFs信号所含信息质量进行评估,重构故障信号,并输入一维卷积神经网络(1DCNN)模型,获得准确度和效率优于传统故障诊断方法的算法和模型。
1 故障特征提取方法
国内外学者使用EEMD对信号进行重构时,通常选取前n个IMFs组成重构信号[2-3],忽略IMF含有每个工况不同的固有信息。通过传统EEMD算法分解得到的IMFs排序,可能存在顺位靠后含有更多的故障信息IMFs信号被忽略,造成信号信息筛选不充分,有效分量无法得到正确筛选等不足。为解决上述问题,提出一种基于信息质量筛选准则的改进EEMD算法,有效选择含有较多故障特征固有模态分量IMFs,组成重构信号。
1.1 固有模态分量IMF的相关系数与峭度
经EEMD分解缸盖振动信号xn(t)的固有模态分量:IMFi(t)=(IMF1,IMF2,…,IMFn-1),其相关系数ρi的数学描述为
(1)

相关系数ρi是研究变量之间相关关系密切程度的统计指标,ρi趋近于1,分离出的固有模态分量IMF与信号相关关系越密切。
峭度Ki用于描述波形尖峰度的一个量纲一的量参数,是衡量信号是否含有较多冲击成分的时域特征指标。当柴油机缸套壁磨损程度加大时,缸套-活塞环组振动信号含有较多的冲击成分,此时峭度明显增大,峭度Ki的数学描述为
(2)
式中:Ki为IMFi的峭度;μi为IMFi的均值。
缸套-活塞环出现故障时从故障缸缸盖处测取的振动信号经EEMD分解出的IMFi(t)包含不同频段的固有振动成分,选取能有效凸显故障特征峭度大的IMFi(t)组成重构信号,可有效筛选故障振动信号[4-5]。
1.2 基于IMF信息质量筛选准则的改进EEMD算法
对能够凸显故障特征IMFi分量重构信号的获取,需满足如下要求:①组成重构信号的IMFi分量与原信号密切相关(即相关系数ρi越接近1);②该分量包含能有效体现故障的特征量(如峭度)。基于此要求,确定EEMD算法并获取重构信号的IMF信息质量筛选判别标准为和目标函数f为
(3)
f=max{β|ρi| +(1-β)Ki}
(4)
式中:β、1-β为权重因子,β取0.7。
1.3 多模块一维卷积神经网络原理及网络架构
深度卷积神经网络(DCNN),其显著优势在于:有效缓解传统神经网络因参数过多导致运算效率低下、网络训练困难、过拟合等。其运算核心是通过构成卷积层的多个滤波器卷积核实现的,随着卷积核的运动,当前层的神经元与前一层特征图中的局部区域稀疏连接。机械设备运转过程中,数据采集获取的实时振动信号是一维时序向量,1DCNN作为一维卷积运算,其结构简单,参数变量较少,为此选用该算法作为缸套-活塞环故障诊断研究方法。
充分利用1DCNN的技术优势,结合本研究实际特点,为更有效提取缸套-活塞环故障特征信息,提出多模块一维卷积神经网络(multi block 1-d convolution neural network, MB-1DCNN)方法,将故障特征信息分为故障特征提取与故障模式识别两部分:①故障特征提取,由数个自组模块构成,单个模块包含卷积层、批归一化层、激活层、池化层;②故障模式识别,在常规全连接层的基础上加入dropout层,进一步缩减参数量,提升系统运算效率和鲁棒性。本研究网络架构设计遵循奥卡姆剃刀原则,其优点在于在满足分类效果的前提下,采用浅层网络结构设计时,缸套-活塞环故障模式识别中可使用更少计算资源获得更有效的故障模式识别。
2 故障诊断流程及试验平台设计
2.1 改进EEMD-MB1DCNN故障诊断流程
基于前述提出的故障诊断方法,结合船用中高速柴油机缸套-活塞环工作特点及常见的故障问题,构建该易损件潜隐故障诊断流程见图1。

图1 改进EEMD-MB1DCNN故障诊断流程
1)在不同负载下,分别测取缸套-活塞环4种故障模式下位于故障缸缸盖处的原始振动信号x(t);将采集信号经降噪处理进行EMD分解后,加入随机白噪声nn(t)再进行EEMD分解,得到上述故障模式下各振动信号的固有模态IMFi(t)分量。
2)根据IMF信息质量筛选判别准则及其目标函数f,以能有效凸显故障特征的峭度特征量(取大者)作为评判指标,对单个IMFi(t)信号所含信息质量进行评估,对EEMD分解所得的各组IMFi(t)进行筛选重构,获得4种故障模式下新的一维时序重构特征信号X′(t);重构信号按80%的训练样本与20%的测试样本划分,将训练样本集输入MB-1DCNN网络训练,获得经样本训练好的缸套-活塞环故障模式识别分类器。
3)将验证用测试样本集输入训练好的分类器,验证模型有效性和准确性,并对分类器进行适当参数调正;将训练好的模型和分类器应用于船用柴油机缸套-活塞环实际故障诊断,获相应故障诊断结果。
2.2 试验平台的设计与搭建
为验证所提方法对船用中高速柴油机缸套-活塞环组潜隐故障诊断的有效性,设计并搭建试验平台。试验平台选用船用高速柴油机组,柴油机型号为QC-50BW-CY;额定功率/转速为50 kW/1 500 r/min,缸径/冲程:105 mm/125 mm,4缸;发电机组型号:WHI224;负载箱采用水电阻负载水缸;信号采集设备选用DH5922型信号采集仪和DHDAS测试分析系统。加速度传感器最大可测加速度为50 g m/s2,谐振频率为kHz,采用恒流源24VDC,4 mA。
试验中,在缸盖顶部位置安装加速度传感器实时采集振动信号,在柴油机输出轴飞轮端使用光电传感器采集转速信号,通过反光标签反射信号记录柴油机输出轴转速,通过改变水电阻负载水缸电阻片与盐水接触面积设置柴油机外加负载。试验过程中,通过NO.1缸的人为设置4种故障模式进行试验,试验工况按4种故障模式下5种负载状态(空载、25%、50%、75%、90%负载,转速1 550 r/min)开展试验。
3 试验数据采集与分析
3.1 原始振动信号特点与时频分析
平台船用柴油机额定转速为1 550 r/min,每个工作循环持续时间约为0.077 s。由于光电传感器实际采集转速无法稳定在额定转速,其对应每个工作循环的持续时间在0.075~0.08 s之间变化,采样频率为51.2 kHz。为确保单个样本包含1个完整的工作循环的信息,设定单样本信号长度为4 096。
将安装于柴油机NO.1缸盖上的加速度传感器采集的原始振动信号经A/D转换器和DHDAS软件转换后,可获得对应的数字信号。4种故障模式下不同负载测得10个工作循环各信号点均值连线的信号见图2,体现1个工作循环原始振动信号数据。对比图2a)和b),活塞环断环1道故障在峰值附近出现更多幅值大的重复冲击信号,时频域波形与正常状态信号波形有明显区别。对比图2c)和d),尽管缸套过度磨损程度不同,但其振动信号波形相近,说明同类型故障,尽管严重程度不同但可能呈现相同的故障特征。

图2 十个工作循环的均值时频信号
3.2 改进EEMD算法有效性分析
为评估文中所提故障诊断方法对柴油机4种故障状态特征提取的有效性,采用经奇异值分解(singular value decomposition, SVD)的奇异值作为特征向量和振动信号特征提取有效性的衡量指标,同时通主成分分析法(principal component analysis, PCA)对改进EEMD算法与传统EEMD算法分别处理同一原始信号获得的结果进行分析,得到4种故障状态特征值三维散点分布,见图3。分析图3a)、b)可知,传统EEMD针对缸套-活塞环组四种故障状态采集振动信号特征量提取效果不佳,类与类之间欧式距离无法拉开。改进EEMD算法4种故障状态样本集群的欧式距离明显增大。

图3 EEMD改进前后奇异值三维特征值散点
3.3 基于改进EEMD-MB1DCNN缸套-活塞环故障诊断分析
3.3.1 网络模型参数设置
基于前述改进EEMD-MB1DCNN网络结构设计原则,经反复试验设置四种故障状态下缸套-活塞环故障诊断MB-1DCNN模型,该模型各参数设置见表1。为抑制过拟合问题,Dropout层以一定概率将网络模型中各神经元归0,卷积层与池化层之间均设置批归一化层和激活层(ReLU)。此外,以准确率和损失率为评价指标,本实验分别验证学习率0.01、0.1和0.5与迭代次数之间关系,在学习率为0.1,最大迭代次数为50的情况下,此时模型准确率最高,损失率最低。

表1 MB-1DCNN各参数值设置
3.3.2 数据采集
本试验,数据采集与诊断分析过程如下。
1)为保证有足够量的数据作为改进EEMD-MB1DCNN模型的训练样本输入量,试验中,4种故障状态下,5个负载工况下分别采集200个信号样本,按4∶1的比例以随机取样方式分割为训练样本集与测试样本集。
2)在故障特征提取阶段,采用改进EEMD算法将4种故障状态、5个负载工况下分别测取的振动信号分解为固有模态分量IMFs,依据第2节中的IMF信息质量判别准则,以能够有效凸显故障特征的峭度(峭度大)为选取原则,筛选如图6所示4种故障模式下的IMFs分量重构信号频域样本集。
3)以32组训练数据为一批次输入训练网络,迭代50次,MB-1DCNN模型完成训练后采用Softmax作为激活函数,计算该训练数据发生4种故障模式的概率,最终通过全连接层将被测数据归入柴油机4种故障模式对应项中,并获得相应诊断结果。
3.3.3 IMFs重构信号频域分析
通过改进EEMD算法IMF信息筛选准则筛选后的IMFs,断环故障高频频段的IMF权重得到提升,该筛选结果符合断环实际故障发生时的机理特征。磨损状态下一个工作循环的各冲程中蕴含重复性振幅大的冲击信号,但由于部件工作间隙变大,该信号出现明显减少,在做功冲程时振幅峰值达到最大,符合缸套过度磨损故障时信号总体能量减少的故障机理特征。尽管缸套过度磨损程度加剧,但在频域波形并未产生显著故障特征区别。
3.3.4 实验结果
基于前述改进EEMD-MB1DCNN设计原则,充分利用Python的TensorFlow深度学习框架优点,通过NO.1缸盖上的振动信号传感器,采集4种故障状态、不同负载下一个工作循环原始振动信号,对采集的各组原始振动信号进行EEMD分解,根据IMF信息质量筛选判别准则,以IMF峭度大的分量为选取标准,对各组IMF分量进行筛选重构,获得4种故障模式下,不同负载下新的一维时序重构特征信号,作为MB-1DCNN模型的输入,按既定设置的模型参数进行网络训练,获得测试样本集的故障识别率为98.95%。
为进一步验证所搭建MB-1DCNN模型各层学习能力和数据在CNN层间流动效果,使用t-SNE(t-distributed stochastic neighbor embedding)非线性降维约简算法分析各层学习的特征分布并可视化显示二维散点故障特征分布,实验结果见图4。

图4 测试样本输入MB-1DCNN模型不同层级t-SNE特征可视化输出
图4a)为缸套-活塞环组4种故障原始信号输入的分布结果,由于测取信号的冗余性,各类别信号难以区分;经第1层卷积池化学习后,输出样本逐渐向各自区域聚集,但还很分散且相互混杂,再经第2层、第3层卷积池化学习后,各类别的样本信号逐渐聚拢,相互混杂的样本逐渐减少,各类别的特征可较清楚地被分辨出,经全连接层整合各类别特征后,同状态下特征分布距离进一步各过程的演示,说明本实验MB-1DCNN被缩小,同时增大不同状态下特征距离,经softmax输出层后,各状态特征明显分清。通过上述各过程的演示,说明本实验MB-1DCNN模型强大自学习能力和非线性映射能力。
此外,图4显示,缸套过度磨损+0.25 mm故障状态与磨损+0.5 mm故障状态混杂在一起,随着模块特征值的提取与池化层过滤缩减特征数量,同类数据簇逐渐聚拢,不同类别的数据簇间距拉大直至彻底分开。MB-1DCNN不仅解决本文第3.3.3节不同磨损程度出现相似频域波形,还解决无法精确归集缸套过度磨损+0.25 mm与磨损+0.5 mm特征向量的问题。
3.4 与其他算法对比实验
为验证所设计的模型及算法的性能,通过改进EEMD-SVD-RF与改进EEMD-MB1DCNN算法进行对比实验,其中,改进EEMD-SVD-RF以随机森林RF(Random Forest,RF)作为分类器。考虑到随机取样对分类结果的影响,从缸套-活塞环故障样本数据库中随机选取10组测试数据输入上述两个模型,10次故障识别结果准确率与效率(时间s),见表2。
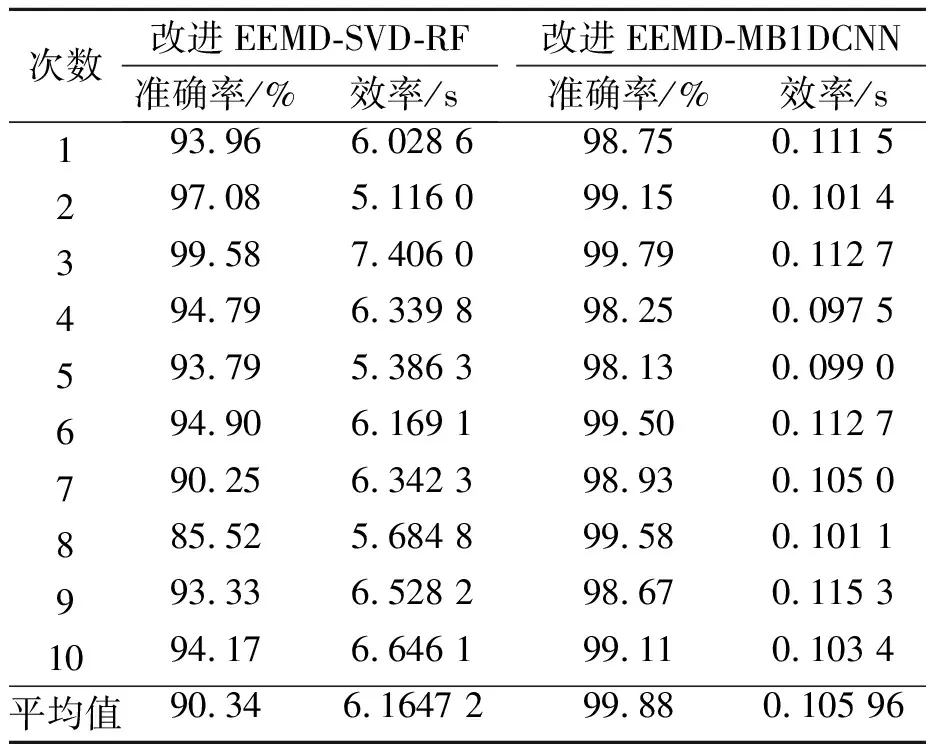
表2 两种算法的10次分类预测结果
从表2中可以看出。文中所提算法准确性与可靠性均优于传统机器学习算法RF,且在效率上MB1DCNN用时明显少于算法RF,显示该算法的合理性和适用性。
4 结论
1)本试验平台设计与以往使用电机倒拖驱动、不加负载空载运行的实验设计不同[6],原始振动信号是在不同载荷的燃烧运行状态下采集获得的柴油机振动信号,使得采集获得的柴油机振动信号能更接近实际柴油机工况。经测试,使用所设计的模型及算法可获得较高的故障识别准确率,该方法可应用于船用柴油机的智能故障诊断。
2)所提出的改进EEMD分解IMF信息筛选准则能有效提取分量中的故障信息,重构信号中的故障特征量更为突出。
