智能机器人在机电设备维修中的应用研究
2024-02-25季小刚JIXiaogang
季小刚JI Xiao-gang
(新疆明基能源有限公司,昌吉 831100)
0 引言
机电设备的维修一直是一项复杂而费时的任务,对维修人员的技能和经验要求较高[1]。然而,随着科技的进步和智能化技术的发展,智能机器人正在被越来越多地应用于机电设备维修中。智能机器人是一种具有自主决策、自主学习和自主执行任务能力的机器人。它可以通过传感器获取环境信息,通过处理算法实现智能化的决策和操作。与传统机器人相比,智能机器人更加适应复杂和变化多端的维修任务,具备更高的灵活性和自主性[2]。如图1 所示,智能机器人可以通过搭载各种传感器和执行器,实现对机电设备的自动检测、诊断和维修。例如,智能机器人可以通过视觉传感器对设备进行图像识别和故障检测,通过机械臂和夹具进行零部件的更换和维修。

图1 智能机器人在机电设备维修中的应用
通过对智能机器人和机电设备维修的相关文献进行综述,分析了智能机器人在机电设备维修方面的研究现状。接着,对智能机器人在机电设备维修中的关键技术进行了探讨,包括路径规划和智能诊断关键技术,使智能机器人能够识别和修复机电设备的故障[3]。同时,未来的研究方向还可以进一步探索智能机器人在其他领域的应用,并针对不同场景下的机电设备维修提出更加精细化的解决方案。
1 智能机器人在机电设备维修中的应用研究
1.1 智能机器人在机电设备维修中的研究现状
智能机器人是一种具备感知、决策和执行能力的机器,可以根据环境变化和任务要求自主进行工作。在机电设备维修中,主要应用的是工业机器人和服务机器人[4]。智能机器人在机电设备维修中的具体应用方式是智能机器人可以通过搭载各种传感器和执行器,实现对机电设备的自动检测、诊断和维修。例如,智能机器人可以通过视觉传感器对设备进行图像识别和故障检测,通过机械臂和夹具进行零部件的更换和维修。智能机器人还可以通过语音交互和人机界面与操作人员进行沟通和指导[5]。
1.2 机电设备维修的研究现状
机电设备的维修主要是针对机电设备进行故障诊断和故障预测。大多数研究人员以设备故障针对为主。随着机械设备结构愈加复杂,在实际生产过程中,零部件故障的发生也将会导致巨大损失,因此国内外对于机械设备的故障诊断开展了广泛研究。目前针对于机械故障诊断研究大多集中在以下方向:基于解析模型的故障诊断方法和数据驱动的故障诊断方法[6]。由于可用的训练数据不平衡,利用传统的故障诊断方法进行故障诊断时,会出现多数类样本对于少数类样本的撤销作用,表现为多数类样本的故障准确率较高而少数类样本的故障准确率极低,影响传统故障诊断方法的可靠性和有效性。
1.3 智能机器人在机电设备维修中的应用需求和潜在优势
智能机器人具有较强的感知和判断能力,能够根据环境和任务要求做出合理的决策。同时,智能机器人还能够通过云计算和大数据分析等技术实现智能化学习和知识共享。这些特点使得智能机器人在机电设备维修中具有更高的灵活性、可靠性和适应性[7]。
智能机器人在机电设备维修中的应用需求主要是:首先,智能机器人可以通过预测性维护来提高设备的可靠性和可用性。它可以通过分析设备的工作状态和维修记录,准确预测设备的故障和维修需求,提前进行维修,避免设备停机造成的损失。其次,智能机器人可以执行一些复杂和危险的维修任务。例如,在高温环境下进行设备维修或到达人类难以接触的狭小空间。智能机器人具备强大的适应能力和操作能力,能够高效地完成这些任务。此外,智能机器人可以通过图像识别和模式识别等技术,识别设备故障的根本原因,提供准确的故障诊断和修复方案。
智能机器人在机电设备维修中的潜在优势是:首先,智能机器人可以减少人为因素对维修过程的影响,提高维修的准确性和稳定性。其次,智能机器人能够实现对设备的实时监测和远程控制,提高维修效率和响应速度。最后,智能机器人可以减少劳动强度和工作负荷,提高维修人员的工作环境和安全性。
2 智能机器人在机电设备维修中的关键技术
2.1 视觉识别技术
作为机器视觉领域的重要研究方向之一的目标识别算法是一个涉及多学科的交叉研究领域,同时也是工业机器人视觉辅助分拣系统的重要组成部分。目标检测主要是利用计算机视觉技术,对图像进行分析和处理,从而实现对物体的定位、识别、分类等功能。目前,目标检测方法主要有两种,即传统的及基于深度学习的目标识别方法[8]。
传统目标检测算法通常是人为寻找一个或有限多个目标物体特征,根据实际问题的不同应用条件或场景对特征进行分析,并根据分析结果进一步得到目标物体的类别及位姿信息。基于深度学习的目标检测算法:近年来,随着卷积神经网络逐渐兴起,各种基于卷积神经网络的目标检测算法方兴未艾,相较于传统方法,基于深度学习的目标检测算法的检测性能得到显著提升,鲁棒性更强,应用领域更广。
2.2 智能诊断技术
生成对抗网络作为深度学习中较为热点的研究方法之一,已经广泛应用在计算机视觉、情感语音和超分辨率图像等领域。GAN 由于其特殊的基于对抗的训练机制,使得模型泛化能力得到增强,生成样本质量得以提高。这对于解决机械故障诊断的难点,如故障样本少等问题,提供了一种可靠的解决方案。
首先研究了基于多指标评价生成对抗网络的故障诊断方法。该方法在GAN 原始优化目标的基础上,利用样本标签、隐层特征以及真实样本和生成样本,分别构建重构标签损失函数、重构特征损失函数与重构样本损失函数,对生成样本与真实样本之间进行多指标度量,最大程度减小故障信息丢失,使生成器尽可能从多方面捕捉到故障样本特征,提高生成样本质量。
其次,研究了基于循环卷积生成对抗网络的故障诊断方法。该方法主要对生成器架构进行改进,针对于旋转机械信号特点,引入卷积网络、循环网络以及注意力模块,并以此构建生成器。所设计的生成器结合卷积神经网络和循环神经网络的优势,能够有效分析采样数据中内在联系和规律获得主要特征,并引入注意力模块赋予循环网络输出值不同权重,有选择地增强各个位置的特征,以使生成器能够减少历史信息丢失的同时加强重要信息的影响,更适合机械一类序列数据的数据扩充。
3 实验与分析
3.1 实验环境与设置
所有实验的环境配置如表1 所示,使用Tensorflow 框架与Python 模拟一个二维的路径研究环境,并将机器人的环境分解为小的网格,机器人的导航空间S 为小正方形区域,每一个网格代表一种状态。网格地图的规模设置为两个,最小移动单元为40,状态空间分别为11*11、15*15。环境设置为有边界的状态空间,地图外围为智能体不可达区域,智能体由灰色圆圈表示,黑色正方形是障碍物。

表1 实验环境设置
3.2 结果分析
使用Tensorflow 模拟一个二维的路径研究环境,并将机器人的环境分解为小的网格,机器人的导航空间S 为小正方形区域,每一个网格代表一种状态。网格地图的规模设置为两个,分别440*440、600*600 像素,最小移动单元为40,状态空间分别为11*11、15*15。环境设置为有边界的状态空间,地图外围为智能体不可达区域,智能体由灰色圆圈表示,黑色正方形是障碍物。图2 展示了算法在两种地图中规划的最优路径。
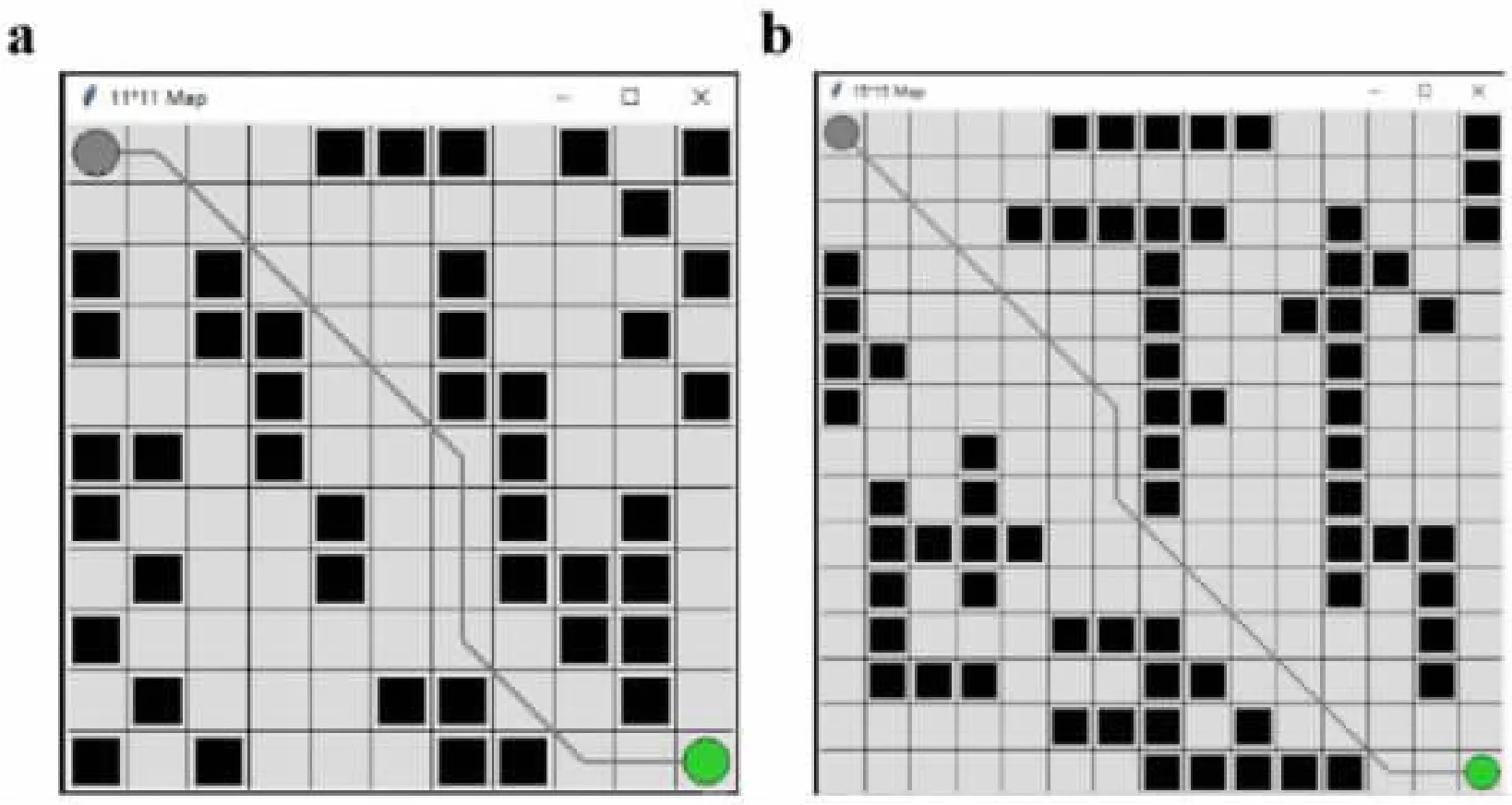
图2 基于视觉的智能机器人运动仿真结果
表2 中,所提方法的5 次验证结果均优于其他方法,即使在训练集数据极不平衡的情况下,所提方法仍能生成高质量的样本,有效扩充原始数据集,并最终获得0.9868的平均指标值。另外,在5 次验证结果中,最低一次F1指标大小为0.9203,最高为0.9940,最大值与最小值相差较小,整体上模型性能较为稳定。不同训练集下的方法对比具体指标值如表2 所示。

表2 5 次测试集验证指标值
4 结论
针对智能机器人在机电设备维修中的应用进行了研究,通过对关键技术的探讨和实验验证,证明了智能机器人在机电设备维修中的潜力和优势。智能机器人技术的不断进步和智能化程度的提高,将进一步推动智能机器人在机电设备维修中的应用。同时,面临的挑战和问题也需要进一步研究和解决,以促进智能机器人在机电设备维修中的更广泛应用。
