悬挂式单轨车辆的倒T形辙叉道岔通过性能*
2024-02-23王伯铭
孟 姝 黄 海 王伯铭
(西南交通大学机械工程学院, 610013, 成都)
悬挂式单轨交通系统具有造价低、安全性高、地形适应性强的特点,非常适合在中小型城市作为主要的公共交通形式,也适用于景区的旅游交通。
文献[1]利用ADAMS软件分析了悬挂原件参数和侧风对车辆运行性能的影响;文献[2]分析了导向轮预压力、侧风和抗侧滚止挡角度对车辆性能的影响;文献[3]等分析了车桥耦合系统的共振问题;文献[4-5]等通过车桥耦合动力学研究,对悬挂式车桥系统进行了优化改进。目前,对于悬挂式单轨交通系统道岔结构的研究较多,而对悬挂式单轨车辆在道岔通过性能方面的研究较少。
本文基于对称式橡胶轮胎箱型轨道梁结构,对于悬挂式单轨车辆通过倒T形辙叉道岔的动力学性能进行分析研究,并提出一种导向轨面补偿装置,以改善车辆通过道岔时的动力学性能。
1 建立车辆与道岔的仿真模型
本文所研究的悬挂式单轨车辆采用单电机双轴驱动,其电机布置在转向架的中央,能大幅减小转向架的点头惯量和摇头惯量,提高列车运行平稳性。
本文采用UM(多体动力学)软件建立动力学仿真模型。建立模型时,将构架、驱动电机、车体、悬吊梁、吊架均视为刚体,不考虑受力造成的轻微变形;走行轮、导向轮及稳定轮均采用FIALA轮胎力元来模拟轮胎与轨道之间的接触关系,减振器元件采用线性阻尼力元模拟;抗侧滚止挡和横向止挡根据真实情况设置相应的特性曲线。悬挂式单轨车辆仿真的主要参数如表1所示,所建悬挂式单轨单电机双轴驱动转向架车辆动力学模型如图1所示。
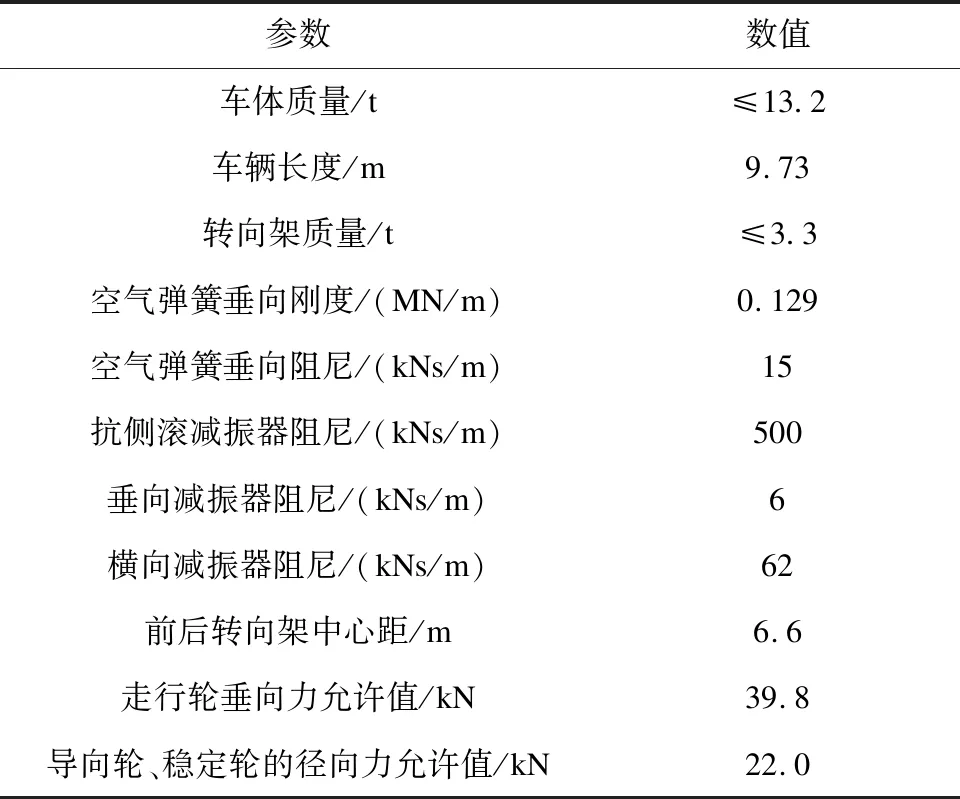
表1 悬挂式单轨车辆仿真的主要参数
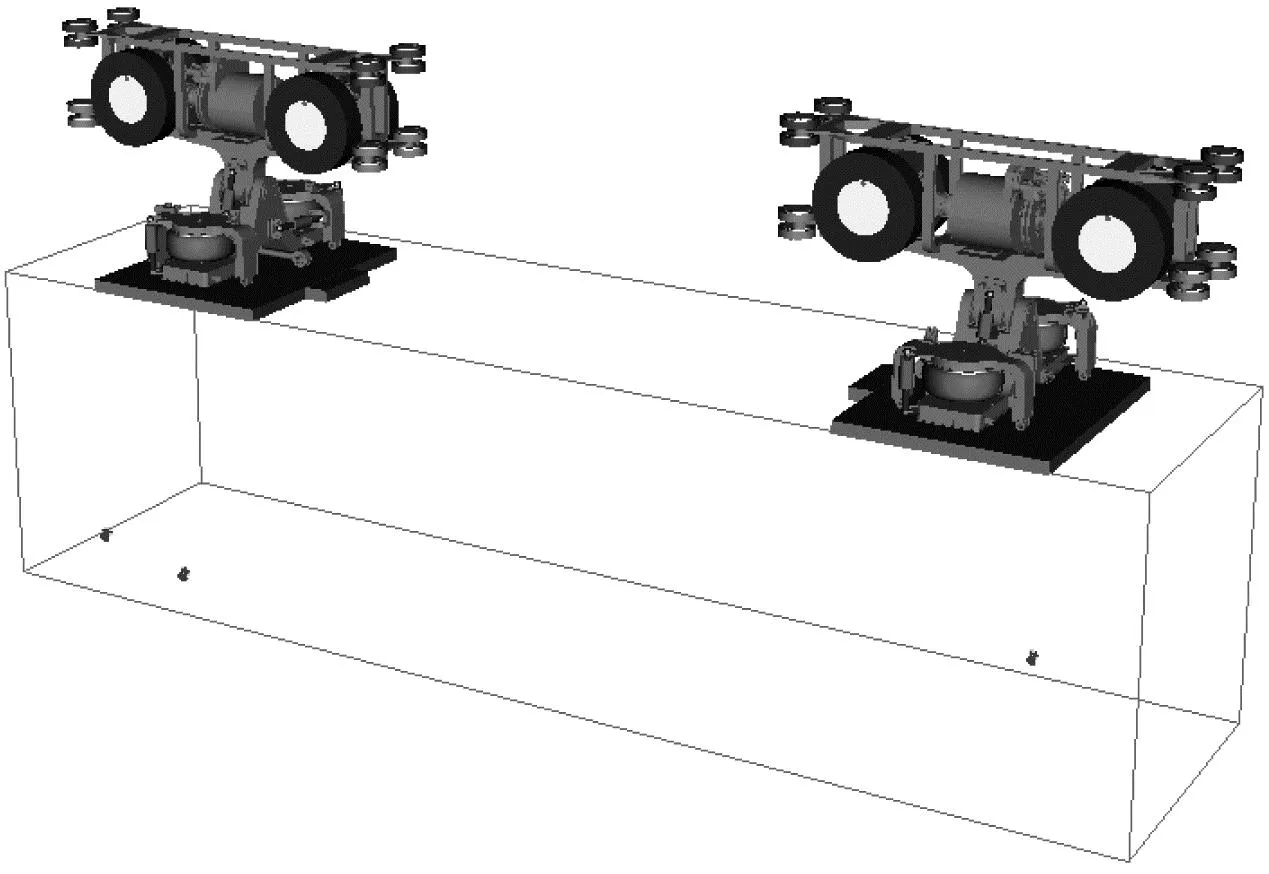
图1 悬挂式单轨单电机双轴驱动转向架车辆动力学模型
受UM软件的局限性限制,将道岔模型测量数据换算成不平顺激励来模拟道岔对车辆动力学性能的影响。为了更加直观地研究道岔对车辆动力学的影响,不平顺激励只包含道岔结构本身的不平顺,不包含由轨道制造或建设产生变形而造成的不平顺。
以文献[6]的悬挂式单轨道岔结构为参考,选择辙叉和走行轨面一体的倒T形辙叉道岔结构,取道岔曲线半径为50 m。倒T形辙叉道岔的三维模型如图2所示。位于道岔中间的可动倒T形辙叉,通过转动到不同位置来引导列车进入不同线路,并能在列车通过道岔的时候提供走行轨面支撑。
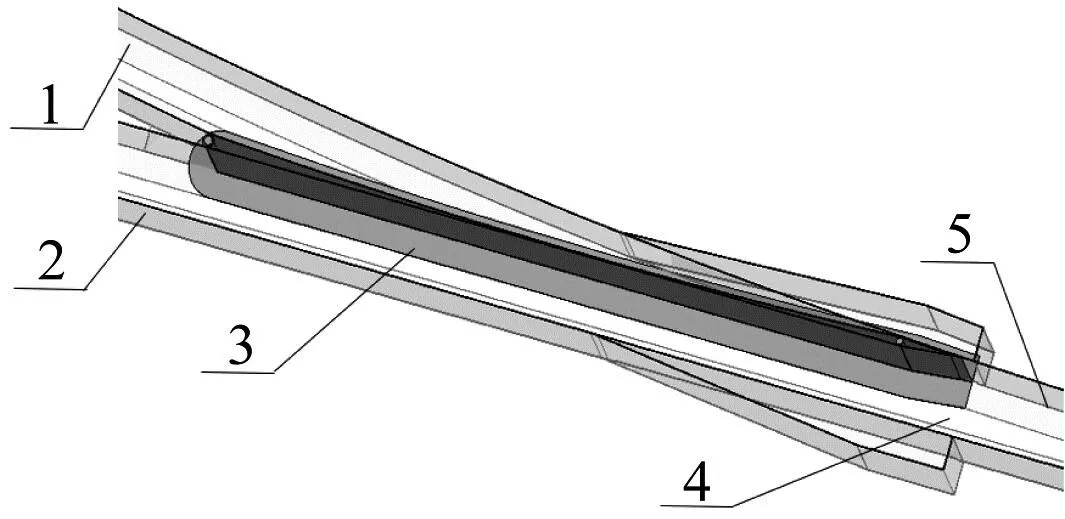
注:1—曲线区域;2—直线区域;3—辙叉;4—走行轮部分悬空处;5—直线曲线混合区域。
受轨道结构的限制,车辆在接触倒T形辙叉的时候会出现走行轮部分悬空的情况。经过静态分析,走行轮悬空的影响可忽略不计,故本文不考虑其造成的走行轮力学性能变化。
当倒T形辙叉转动时,两侧导向面需要相互贴合,因此在走行轮部分悬空会造成导向轨面的不平滑,将在车辆通过时产生较大的横向力,对车辆的运行性能有很大影响。此外,由于倒T形辙叉转动后需要由两侧轨道梁的走行面来支撑,所以走行轨面在此处也是不平滑的。倒T形辙叉附加的走行面不平顺如图3所示。本文暂不考虑实际使用中为保证辙叉正常转动所需要预留的安装间隙,只考虑走行面钢板的厚度。根据文献[7],轨道梁钢板厚度取为14 mm。
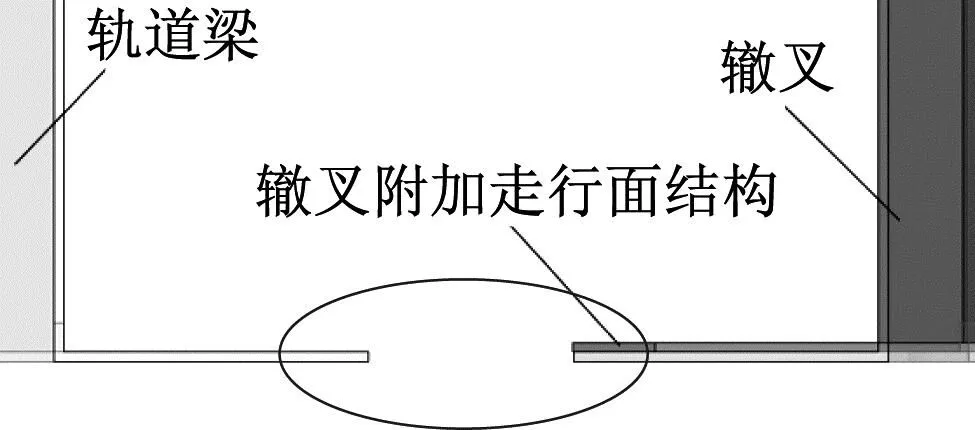
注:圈出部分右侧钢轨比左侧钢轨高出一个钢板厚度(14 mm)。
通过对道岔模型的测量,可以得到相应的不平顺数据。图4为车辆通过道岔的示意图。当车辆通过直线道岔时,需要对右侧的走行轨面、导向轨面和稳定轨面添加相应的不平顺激励。当车辆通过曲线道岔时,需要对左侧的走行轨面、导向轨面和稳定轨面添加相应的不平顺激励。
a) 经过直线道岔
本文研究的曲线道岔线路情况比具有缓和曲线的实际条件更为恶劣,其采用直线—圆曲线—直线的设置方式,不设置缓和曲线,对应的线路长度为50 m、30 m、50 m。由于道岔不平顺数据量较大,考虑篇幅限制,不再列出三维模型测量后转化的不平顺数据。
根据GB 5599—2019《机车车辆动力学性能评定及试验鉴定规范》规定,悬挂式单轨车辆的加速度观测点设置在距转向架中心1 000 mm处一侧车体地板面上。车辆通过速度为v,前观测点标记为F,后观测点标记为B,具体观测点位置如图5所示。
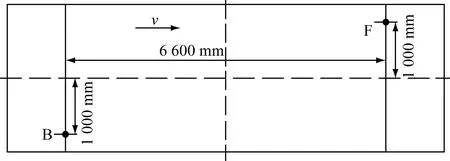
图5 悬挂式单轨车辆平稳性观测点
2 悬挂式单轨车辆的道岔通过性能
相对于道岔结构所造成的不平顺激励,轨道和道岔本身的不平顺非常小,本研究忽略不计。在车辆通过直线道岔时,若走行轮最大垂向力数值未逼近极限值,则认为能够安全通过。
采用UM软件对曲线半径为50 m的道岔进行动力学计算,得到不同载荷状态下车辆通过不同道岔的评定指标数据,如表2所示。由表2进一步分析车辆的道岔通过性能。
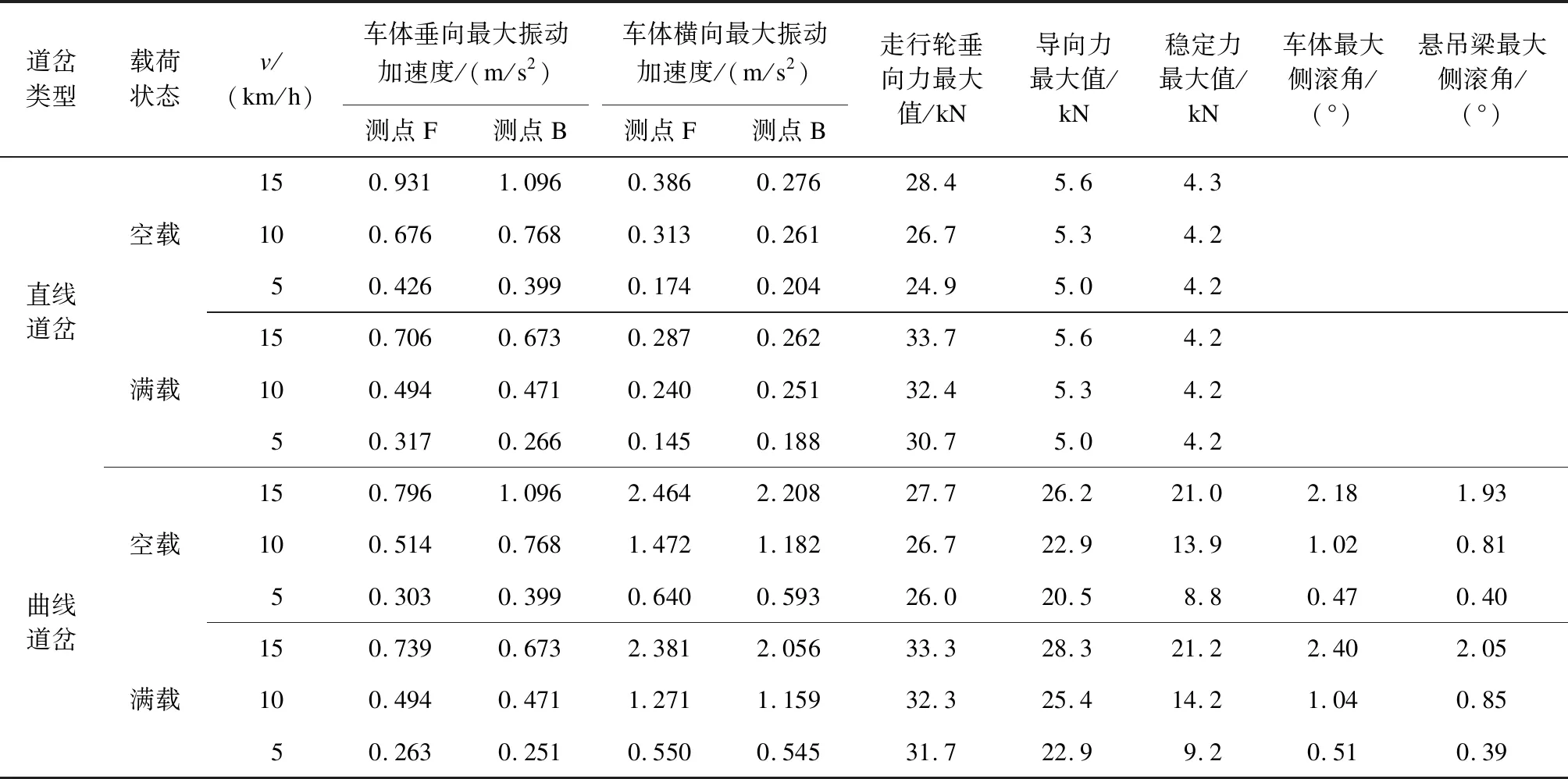
表2 不同载荷状态下车辆通过不同道岔时的评定指标数据
无论是直线道岔还是曲线道岔,悬挂式单轨车辆在空载和满载状态下通过时的车体垂向振动加速度和横向振动加速度均未超过2.50 m/s2,符合相关要求。
在满载状态下,车辆经过直线道岔时的走行轮垂向力最大值为33.7 kN,小于走行轮的垂向力允许值(39.8 kN)。导向力和稳定力的最大值也远远小于导向轮和稳定轮的径向力允许值(22.0 kN)。由此判断,车辆可以实现正常通过直线道岔。
当空载状态车辆以15 km/h速度通过曲线道岔时,走行轮垂向力最大值为27.7 kN,小于走行轮的垂向力允许值39.8 kN。然而,当空载状态车辆以15 km/h和10 km/h速度通过曲线道岔时,导向力最大值均高于径向力允许值(22 kN),不符合标准要求。当空载状态车辆以速度5 km/h通过时,导向力最大值仅为20.5 kN,低于22 kN,说明车辆可以安全通过。
当满载状态车辆以15 km/h速度通过曲线道岔时:走行轮垂向力最大值为33.3 kN,小于走行轮的垂向力允许值(39.8 kN);导向力和稳定力最大值分别为28.3 kN和21.2 kN,其中导向力最大值高于径向力允许值(22 kN)。即使满载状态车辆仅以5 km/h的速度通过曲线道岔,其导向力最大值也达到了22.9 kN,超过了22 kN。因此,在曲线半径为50 m的倒T形辙叉道岔上,车辆速度须低于5 km/h,使得导向力最大值低于22 kN,才能安全通过。
3 导向轨面补偿装置
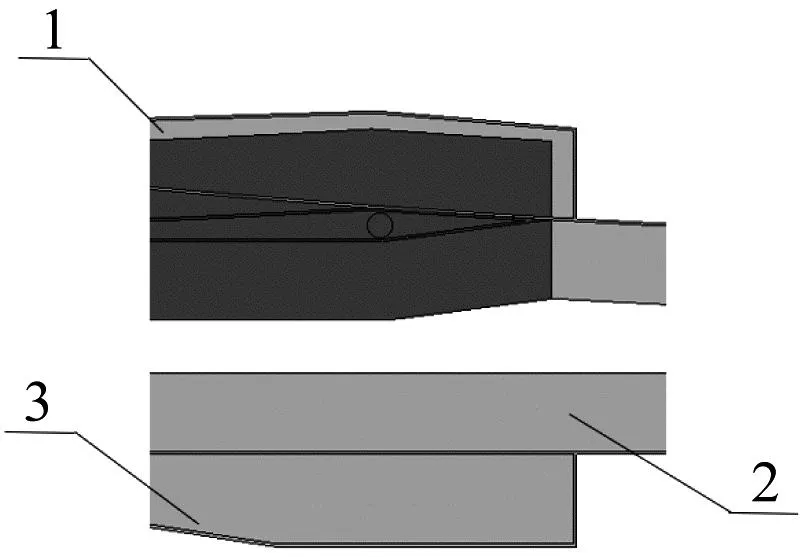
为了优化车辆过岔时的动力学性能,提高悬挂式单轨车辆的过岔速度,使倒T形辙叉道岔具有实际运用的可行性,本文提出了一种位于辙叉前端的导向轨面补偿装置,其结构如图6所示。

图6 辙叉前端导向轨面补偿装置结构示意图
在轨道梁上方安装一个伸缩装置,当辙叉转动到一侧的时候,对应侧的导向轨面补偿结构便会从轨道梁上方向下移动,补偿辙叉前端结构造成的导向轨面不平滑。车辆直线通过道岔时的导向轨面补偿装置与此类似。
对增加导向轨面补偿装置后的道岔模型进行测量,得到新的道岔不平顺数据。将新的道岔不平顺数据添加到UM软件中重新进行动力学计算,可以得到车辆以15 km/h速度通过道岔时的评定指标数据如表3所示。
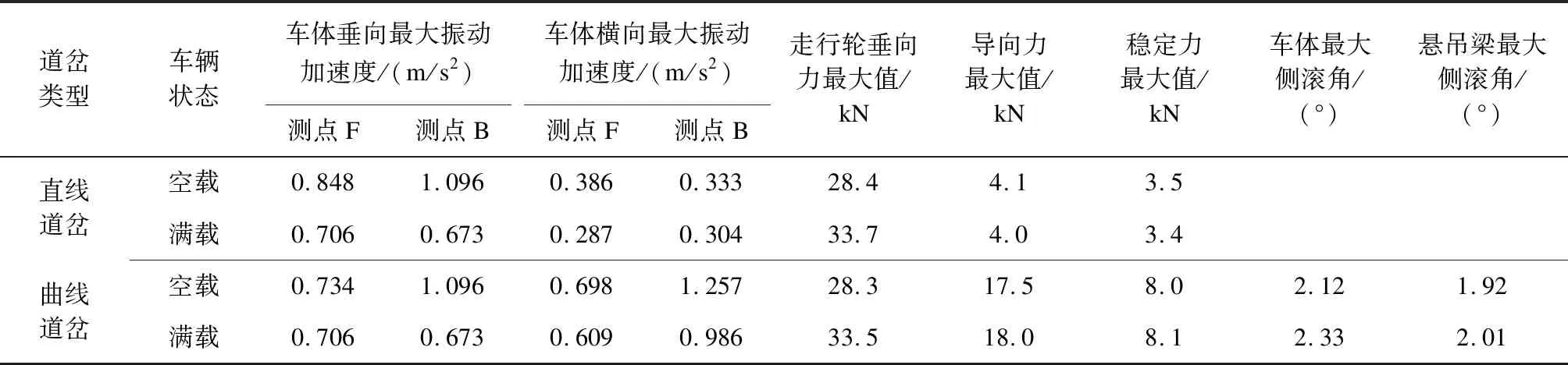
表3 增加导向轨面补偿装置后车辆以15 km/h速度通过道岔时的评定指标数据
由表3可知,在曲线半径为50 m的倒T形辙叉道岔上,空载状态和满载状态下的悬挂式单轨车辆以15 km/h的速度通过直线道岔和曲线道岔时,其车体的垂向最大振动加速度和横向最大振动加速度均未超过2.50 m/s2。
在车辆满载状态下经过直线道岔的时候,走行轮垂向力最大值为33.7 kN,小于走行轮的最大允许垂向力39.8 kN。在车辆满载状态下通过曲线道岔时,导向力最大值为18.0 kN,稳定力最大值为8.1 kN,均小于径向力允许最大值(22 kN)。
通过对比表2及表3中速度为15 km/h时的车辆运行评定指标数据可知,增加导向轨面补偿装置后,悬挂式单轨车辆通过直线道岔时各项数值差别不大,通过曲线道岔时导向力最大值、稳定力最大值及车体横向最大振动加速度均得到了明显改善,其余数值无明显变化。这说明设置导向轨面补偿装置能有效改善悬挂式单轨车辆通过倒T形辙叉曲线道岔的平稳性。
4 结论
1) 倒T形辙叉道岔结构造成的导向轨面不平顺较大,悬挂式单轨车辆虽然可以安全通过直线道岔,但在通过曲线道岔时,导向轮所承受的导向力非常大,即使降低通过道岔的运行速度,也很难保证导向轮导向力不超过安全限值。
2) 在增加了导向轨面补偿装置后,悬挂式单轨车辆在通过曲线道岔时,导向轮和稳定轮所承受的径向力大大减小,低于导向轮和稳定轮的径向力允许最大值。悬挂式单轨车辆可以以15 km/h的速度安全通过50 m半径结构的倒T形辙叉道岔。
