基于节律步态的六足机器人自适应环境运动规划问题研究
2024-02-23乔海晔吴清辉汪丽娟
乔海晔,吴清辉,汪丽娟
(1.佛山职业技术学院,广东 佛山 528137;2.广州市威控机器人有限公司,广东 广州 510500)
1 研究现状
2009 年,西班牙工业自动化研究所开发了一台军用六足机器人“SILO-6”,它通过全向视觉系统采集与识别地形信息,并配备探测传感器来完成自主扫雷工作。2011 年,比勒菲尔德大学开发了一台用于辅助救援工作的仿生六足机器人“HECTOR”,它仿照竹节虫的三节躯体设计,具有柔性关节,可在不规则地面行走。Estremera 等人提出了一种四足机器人自由步态的生成方法,基于规则的协商算法可以在保持运动速度不变的情况下生成灵活的腿部转移序列,该步态能够有效地适应含有禁区的不规则地形;针对腿部发生故障的意外情况,Yang 等人提出了一种容错步态与自适应步态相结合的方法,故障后采用跟随引导(FTL)策略使得机器人具有容错性和地形适应性的优点;Isvara 等人仅通过在六足机器人足端安装传感器,结合一种简单有效的步态调整算法,实现了在非结构化地形中行走;Palankar 等人提出了一种基于力阈值的位置(FTP)控制器,通过力反馈来调节预先计划的腿部轨迹从而达到地形适应的效果,并且分布式的局部反馈控制对地形有更快的响应速度;Faigl 等人提出了一种极简的自适应运动方法,仅使用伺服电机的位置反馈实现足端的触地判断,采用自适应阈值以提高系统的鲁棒性,达到了理想的实验效果;Murata 等人采用了跟随接触点步态(FCP)控制的方式,实现了六足机器人在崎岖地面的自适应行走,为避免腿部切换状态陷入死锁,引入计时员控制方法规范状态持续时间的上下限,从而使整个系统有效运行。随着深度学习与强化学习的不断发展,其在六足机器人运动控制上的应用探索也逐步深入,Tsounis 等人提出了一种基于模型的运动规划与强化学习相结合的方法,在已知的地形中训练,得到的运动策略能够使四足机器人在楼梯、断层、碎石等复杂环境下运动。
2020 年,Azayev 等人提出了一种专家策略与强化学习相结合使六足机器人实现自适应运动的方法,使用强化学习方法对六足机器人在各种地形下进行自适应运动训练,仿真实验中通过捕捉地形的离散分布,无须外部传感器,对地形进行建模与分类,并提供相应的地形下自适应策略。可以看出,不同的自适应算法在各自实验机器人上都取得了很好的实验效果,足式机器人的地形自适应性能不断提高,并且通过算法的改进,地形自适应所依赖的附加传感器在逐渐减少。
六足机器人在结构上属于多支链冗余自由度、串并联时变拓扑机构,各支撑腿通过地面形成机构上的耦合,且支撑腿的数目及组合方式随时都在发生变化,由于关节自由度众多,运动学解算复杂、控制烦琐,因此六足特种机器人的控制技术难度比较高,此外,还需实现自适应的运动策略和规划,提高机器人平台的灵活性、适应性,这也是当前多足机器人领域研究的一大热点。
2 六足机器人自适应控制技术
针对六足机器人的机身轨迹跟踪运动问题,设计了节律步态下足端轨迹自适应地形策略,在既满足机器人有序稳定运动的要求,又符合机器人的结构特性对其运动约束的基础上,生成具有一定自主跨越和寻找稳定落足点的地形自适应连续轨迹,最终实现六足机器人在崎岖地面进行自适应运动的效果。基于节律步态的自适应运动方法整体框架如图1 所示。
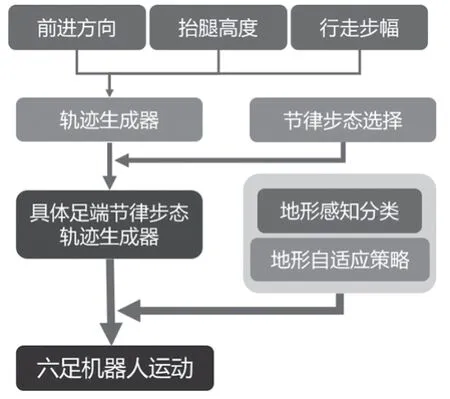
图1 基于节律步态的自适应运动方法框架
2.1 基于节律步态的机身控制关键技术
六足机器人基于节律步态的机身控制方法主要分为两个部分,分别是轨迹生成器和具体足端节律步态轨迹生成器,通过调整节律步态的行走步幅和前进方向,进而调节机身位姿。足端轨迹生成的函数有很多种,其中三角函数具有幅值易调整、相位周期耦合等优点,故轨迹生成器将三角函数用于生成轨迹,对应的摆动相轨迹为:
支撑相轨迹为:
式中,swSep、stSep 分别为摆动相和支撑相的离散插值点序列,范围为[0,1];stepAmp 为设置的步幅;stepRotate 表示前进方向角;stepHeight 为抬腿高度。由上式生成的轨迹用MATLAB 仿真结果如图2 所示。
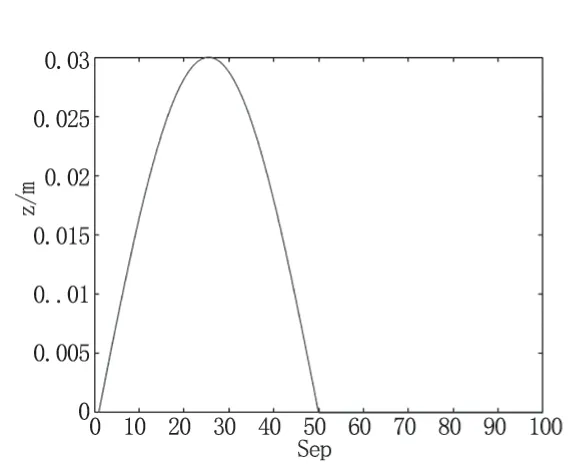
图2 轨迹生成器输出的轨迹
足端节律步态轨迹生成器是把生成的轨迹按照节律步态的摆动次序以及足端相对的初始位置偏移产生每条腿对应的具体足端轨迹坐标,生成的每个足端轨迹MATLAB 仿真结果如图3 所示。模块化设计的优点主要有:(1)足端轨迹生成的函数可依据不同的场景需求调整,扩展性和适用性强;(2)不同节律步态的切换和腿间次序调整方便,每条腿的步幅、方向,抬腿高度均可单独调整,应用灵活性高。通过调整各腿的参数,机身可实现直走、旋转、侧移等运动,能够满足在各类任务对机身运动方式的需求。

图3 生成每个足端的具体轨迹
2.2 基于机身调整的降耦合地形自适应控制关键技术
六足机器人节律步态下足端轨迹自适应地形策略是通过足端接触传感器与改进的足端轨迹设计配合,将复杂环境的地形情况分成了三类:轻度崎岖、中度崎岖和重度崎岖,在此基础上,结合上一部分提出的步态生成方法,给出对应类型地形的自适应策略。
对上述的足端轨迹做出适当改进(如图4)是在原轨迹ABC 中加入了缓冲区和引导区的划分,摆动相中的CD 段被称为缓冲区,ABC 段称为引导区,支撑相轨迹会依据自适应策略以及机身位姿进行实时的规划调整。缓冲区和引导区的大小设置因不同设计结构的六足机器人而异,与机器人的工作空间相关。该改进不仅能为地形自适应的调整策略提供帮助,而且能够使六足机器人在仅有接触传感器的情况下具备一定程度的地形感知分类能力。

图4 改进的足端轨迹示意图
根据落足点在缓冲区CD 段的高度,可以计算出足端之间相对机身坐标的倾斜角,从而估计机器人所处的地形状况,当倾斜角在范围内时,则机器人判定其所处的地形为轻度崎岖地形。在此范围内六足机器人后续的腿部运动没有受到很大的限制,因而可以采用无机身位姿调整策略,其自适应轨迹示意图如图5 所示。

图5 无位姿调整的自适应轨迹
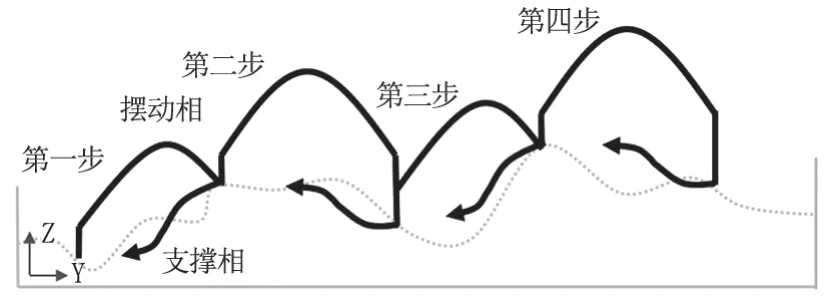
图6 有位姿调整的自适应轨迹
对于落足点处于缓冲区外或者引导区内足端受到碰撞等特殊情况下,机器人将会判定其所处的地形为重度崎岖地形。机器人将触发系列特殊轨迹模式以寻找合适的落脚点,直至超出足端的工作空间,设计的触发模式方案可分为触壁抬腿轨迹模式和踏空寻落轨迹模式。
当足端在抬起阶段受到碰撞时,会触发触壁抬腿轨迹模式,足端沿着重新规划的轨迹完成落足;在下落阶段,足端超出缓冲区范围却仍未有可靠的落足点时,会触发踏空寻落轨迹模式,在可达空间内寻找新的落足点。每个模式都可以被多次触发,形成组合的地形探索及自适应轨迹,能较好地处理特殊情况下落足点的选取问题,从而增强六足机器人在复杂地形中的运动性能。
2.3 基于八叉树地图的六足机器人路径规划
移动机器人在复杂地形中移动时,不仅要考虑障碍信息,还要考虑高低不平的地形因素。通过筛选和处理,构造出一个机器人可以识别的数学空间,以便机器人自身进行判断并实现安全有效的移动。这里将八叉树地图进行处理。
(1)构造数值化模型,取最低点的高度为0cm,其他点的高度以最低点为基准,得出相对高度,形成类似如下数值矩阵:
(2)机器人的抬腿高度决定了能通过区域的坡度,以此为阈值,通过算法筛选矩阵中相邻元素的差值大于阈值的区域,将对应栅格设置为被障碍占据,内部不允许通过。
(3)将障碍物进行膨化处理,使其略大于实际障碍物,移动机器人可以沿着边界行走而不会碰到障碍物。
以上对八叉树地图的处理实现了对三维地图的降维,生成了可供移动机器人路径规划的二维占据栅格地图。接下来,在二维栅格地图上实现移动机器人的全局路径规划,为了兼容复杂地形下的导航,采用由经典的RRT(rapidly exploring random tree)算法改进而来的双树Quick-RRT*算法,其相比RRT 算法具有更快的收敛速度和更好的路径生成质量,适合解决多自由度机器人在复杂环境下和动态环境中的路径规划。
3 实践过程
3.1 六足机器人仿真平台下的运动控制实验
本项目使用VREP 仿真平台完成六足机器人模型的搭建,使用MATLAB 联合VREP 仿真的方式对上述提出的自适应运动控制方法进行实验验证。如图7、图8 所示,六足机器人实现机身位置和姿态的跟踪,并使得六足机器人完成复杂的爬坡和跨越崎岖地形运动,能够达到预期的运动效果。
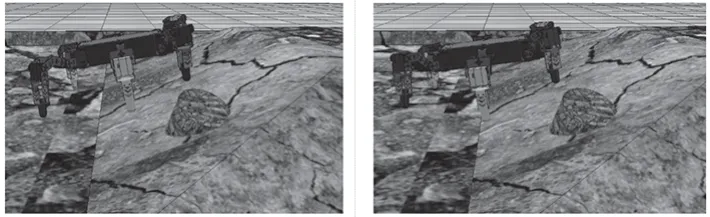
图7 六足机器人爬坡

图8 六足机器人穿越崎岖地形
通过对比正常步态和自适应步态穿越崎岖地形过程中机身位姿的变化,在正常步态下,机身俯仰角度最大达到了2.6303°,翻滚角度最大达到了2.8628°;而在自适应步态下,机身的的最大俯仰角仅0.7014°,翻滚角为0.6061°,自适应运动能达到有效平稳机身的效果。
3.2 基于视觉引导下的机器人自主导航实践过程
多机器人协同环境重构后已经对三维稠密点云地图的空间重复点以及孤立散点进行滤除,本小节直接采用Octomap 工具对点云地图进行压缩,生成八叉树地图,三维稠密点云地图转八叉树地图如图9 所示。

图9 三维稠密点云地图转八叉树地图
