混合动力飞行汽车建模与性能仿真分析
2024-02-21强宣凯朱海涛李炜烽郑俊超钱煜平
强宣凯,朱海涛,李炜烽,郑俊超,钱煜平
1.清华大学,北京 100084
2.中国航空研究院,北京 100012
发展城市和城际间低空立体交通体系能够有效地缓解城市拥堵,提高通勤效率,也可增强主城区辐射效应,促进都市圈建设,契合乡村振兴战略发展需求。具备电动垂直起降功能(eVTOL)的新型飞行器(通称飞行汽车)作为未来立体交通的主要运载工具,受限于当前锂电池技术水平[1],纯电动系统仅能支持其执行短距、小载荷的飞行任务。
动力电池具有低污染、功率输出灵活的特点,能满足起飞阶段的瞬时大功率需求;而燃气轮机具有高功率密度、响应快的特点,能较好满足全工况的功率需求。
基于航空燃气轮机开发的增程混合动力系统可以很好地结合动力电池和燃气轮机的优势,即燃气轮机提供稳定功率输出,动力电池用于补充功率需求和储存冗余能量。混合动力系统能减小飞行汽车对动力电池的装机需求,从而进一步拓宽航程,实现城际间人员及货物运输。
研究人员主要关注新能源动力和分布式电力推进,其中包括纯电动和混合动力的研究。何振亚等[1]基于电池、电机当前的技术水平和发展趋势,结合直升机性能估算方法,对某轻型直升机进行了全电化改型方案设计与性能计算,分析了改型前后续航能力和悬停升限等关键性能指标的变化。结果表明,当前电动直升机的续航能力仅能达到油动直升机的8%左右,但其悬停升限明显优于油动直升机。J.Park等[2]提出了一种燃料电池混合动力系统(FBHS)配置估算方法,并研究了不同功率混合比下的最大航程。D.F.Finger等[3]提出了一种初始尺寸的方法,基于该方法研究了并联式混合动力汽车的任务特性、起飞重量和任务主要能量消耗。结果表明,如果推进系统的尺寸受到短时功率的限制,应该考虑混合电动推进系统。同时,基于该方法设计了几种载客量不同的概念机,并分析了其在混合和纯电动模式下对不同航程飞行任务的适用性[4]。结果表明,未来的中程垂直起降(VTOL)飞机必须考虑混合—电动推进系统,因为这种配置能满足航程需求,同时避免了混合动力的复杂性。D.F.Finger 等[5]同时提供了两种用于预测最大起飞重量和能源效率的混合电动飞机的概念设计方法,并提出了一种混合电动推进系统的过渡型VTOL飞机的功率选择算法。进一步证明了未来的中程VTOL飞机必须考虑使用混合电动推进系统,而短程飞行则倾向于使用全电动推进系统。Li Shuangqi等[6]通过建立综合能源管理和参数选择框架,研究了带有燃料电池混合推进系统的电动飞机的动力分配策略,证明与纯燃料电池飞机相比,氢气消耗可减少16.7%,燃料电池寿命损失可以减少66.4%以上。Patil等[7]研究了燃料电池混合飞行器,并搭建了简易的试验平台。结果表明,对于120km巡航+5min悬停的飞行任务,高功率电池和氢燃料电池组合的动力系统优于单一能量来源的动力系统。
当前,针对飞行汽车动力推进系统的研究还处于起步探索阶段,研究结论主要由飞行汽车构型、最大起飞重量、电池系统能量密度等参数决定,缺乏体系性,即尚未系统分析飞行汽车整机空气动力学、飞行任务规划与动力推进系统三者的关联关系。
因此,本文针对倾转推进方式的飞行汽车,设计了包含二次起降阶段的任务剖面,对增程式混合动力飞行汽车动力系统装机配置、飞行任务参数以及任务经济性进行了参数化耦合分析;明确了倾转推进飞行汽车对锂电池的装机性能要求,定量说明了混合动力系统配置对飞行汽车城市内和城际间交通的任务经济性和有效载荷的影响。研究结果有助于飞行汽车生产商明确动力系统部件性能要求和运营边界,以及政策制定者明确不同飞行任务应选择的动力系统构型。
1 飞行汽车动力学模型
1.1 推进系统选取
基于现有机型和相关文献调研,飞行汽车可按推进系统构型分为4类:多旋翼类型、升力+巡航类型、倾转旋翼类型和涵道矢量推进类型,如图1所示。

图1 典型的飞行汽车推进系统Fig.1 Typical propulsion system of flying cars
(1)多旋翼类型
除矢量推进系统外,无其他的动力部件(见图1中的多旋翼飞机)。其优点为便于控制速度大小和方向,其缺点是能耗较大。
(2)升力+巡航类型
仅在原有架构上增加了升力部件,前飞和垂直起降过程的主要升力来源不同,总能耗大幅降低。其优点为可以简化原有推进系统尺寸,并且可以将升力系统设计为工作在单一的高功率工作点。其缺点为灵活度大幅降低,对起降地的选取也有较高要求。
(3)倾转旋翼类型
具有升力部件,旋翼可在不同飞行阶段提供不同方向的推力。与升力+巡航类型相比,此类型具有较高的机动性。
(4)涵道矢量推进类型
与倾转旋翼类型相似,由涵道风扇提供矢量推力。带固定翼的倾转矢量推进构型的气动特性使其在巡航阶段可依靠固定翼提供大部分升力,所需巡航功率较小。与单一升力源飞机相比,其更能适应大航程的城市及城际间交通。同时,其搭载的倾转矢量推进系统与固定螺旋桨相比,能提供多方向的推力,从而提高动力系统的推进效率。综合以上两个方面,本文选用固定翼倾转矢量推进构型的飞行汽车作为研究对象。
1.2 推进功率计算
飞行汽车在飞行过程中的受力情况如图2所示。巡航状态下,螺旋桨平行于机身方向,提供水平推力;垂直起降和爬升状态下,螺旋桨垂直于机身方向并提供推力,平衡空气阻力和重力,机身姿态角与推力方向有关。飞行汽车的参数见表1。
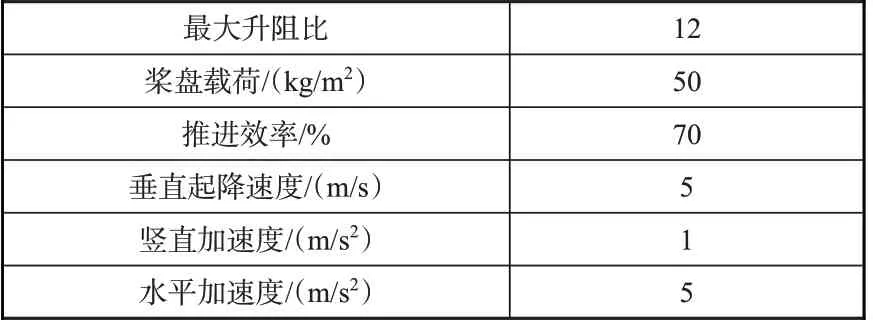
表1 飞行汽车基本参数Table 1 Basic parameters of flying cars

图2 飞行汽车受力情况Fig.2 The force situation of flying cars
1.3 任务剖面划分与运动参数设置
1.3.1 任务剖面划分
为满足城市内及城际间通勤需求,飞行汽车的通勤距离为15~400km,本文选取了60km、120km 和180km 的通勤距离,其中60km 对应城市内通勤,120km 和180km 对应城际间交通。本文选取了1000~3000kg 量级的、对应载客量为2~6人的飞行汽车。
基于现有适航法规及节能需求,设置垂直起降高度和巡航高度分别为120m和1000m。同时,为使飞行汽车安全降落,在垂直降落前增加一段5~10km 的低空巡航阶段,用于观察机场附近情况。此外,飞行汽车应具备二次垂直起降功能。最终确定的飞行任务剖面如图3所示。

图3 飞行汽车的飞行任务剖面划分Fig.3 Mission profile division of flying cars
图3 中,A 和F 为垂直起降阶段。在垂直起降阶段,为减小起降阶段对地面资源的占用以及对生活区的影响,飞行汽车需采用垂直起降的起降模式。起降高度由城市建筑物高度及空域划分确定。其中,F 包括二次垂直起降的飞行任务。B 为爬升阶段。在爬升阶段,以固定的水平速度和爬升率进行爬升,达到巡航高度后转为水平飞行。C 为巡航阶段。在巡航阶段,以固定的水平速度巡航一段时间后进入下降阶段。D 为下降阶段。在下降阶段,以固定的水平速度和下降率进行下降,之后达到过渡平飞阶段。E为过渡阶段。在过渡阶段,飞行汽车在垂直起降对应的高度进行一段时间的水平飞行,继而进行垂直起降。
1.3.2 运动参数设置
采用文献[8]和[9]中的公式,已知飞行汽车的基本参数(见表1),以及当前时刻的速度和加速度,可以计算当前的推进功率。
基于该任务剖面,确定使单位航程能耗最小的最优巡航速度。不同起飞重量的飞行汽车的单位航程能耗与巡航速度的关系如图4 所示。结果表明,飞行汽车的最优巡航速度与最大起飞重量呈正相关。1000~5000kg 量级飞行汽车对应的巡航功率见表2。

表2 飞行汽车巡航功率Table 2 Cruise power of the flying cars
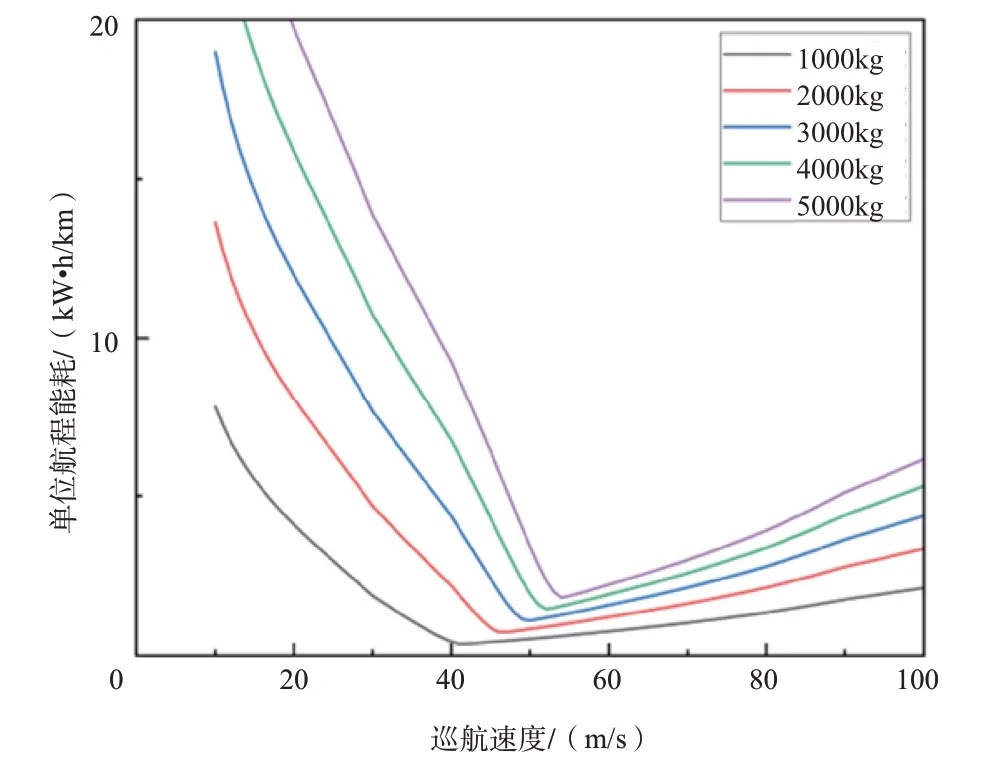
图4 不同起飞重量下飞行汽车单位航程能耗与巡航速度关系Fig.4 Relationship between unit range energy consumption and cruise speed of flying cars under different takeoff weights
在给定的巡航速度下,确定与之匹配的最优爬升/下降速度和加速度。在实际工程应用中,具体数值可根据需求调整。
基于已有飞行任务剖面与功率计算模型,可以得到最大起飞重量(MTOM)为2000kg 的飞行汽车全任务剖面的功率—时间图像,如图5 所示。图5 中A~E 对应前文中的飞行阶段。可以从图5中看出,最大功率集中在垂直起降阶段。其中,下降阶段D和巡航阶段C的功率无较大差别。

图5 功率—时间图像Fig.5 Power-time image
2 混合动力系统建模
2.1 混合动力系统架构
混合动力模式的特点为:由动力电池和燃气轮机发电模组共同提供推进功率,燃气轮机输出恒定功率,动力电池基于当前功率需求放电或充电。
混合动力系统由5 个模块组成:(1)燃气轮机与发电机:燃气轮机直驱发动机,发电机将轴功转化为电能输出到AC/DC 逆变器,燃气轮机全程在设计点附近工作,输出恒定功率;(2)AC/DC逆变器:将发电机的交流电转化为直流电;(3)动力电池:根据充放电模式与功率转换器直接进行电能交换;(4)功率转换器:根据推进系统功率需求分配燃气轮机及电池功率。如图6 所示。在该动力系统中,燃气轮机发电装置主要提供恒定电功率输出,动力电池起“削峰填谷”的作用,即补充不足功率和吸收多余功率。二者共同提供所需的电功率。

图6 混合动力系统Fig.6 Hybrid power system
2.2 燃气轮机发电系统建模
基于静态工作点假设,燃气轮机在一次飞行任务中始终以恒定功率工作。因此,可以根据其输出的最大轴功,同时根据文献[10]中公式计算燃气轮机重量
式中,M为燃气轮机发电系统的净重;PM为燃气轮机的最大轴功输出。
本文采用单转子燃气轮机发电装置,图7所示为单转子燃气轮机构型。图7中编号对应的部件见表3。燃气轮机性能分析流程如图8所示。具体流程主要有以下几个方面。
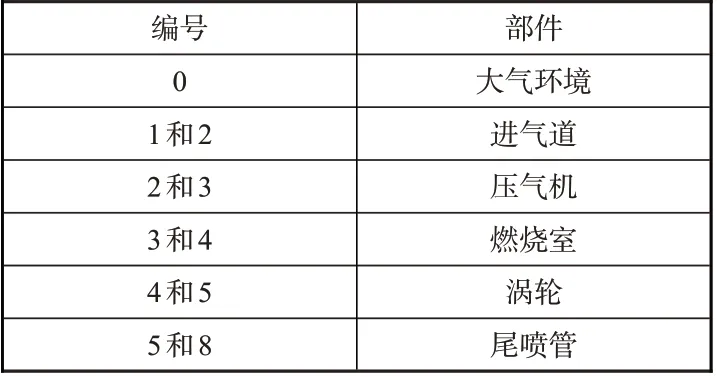
表3 编号对应部件Table 3 Correspondence between parts and numbers

图7 单转子燃气轮机Fig.7 Single-spool gas-turbine

图8 燃气轮机性能分析流程Fig.8 Gas-turbine performance analysis process
(1) 输入给定的热力学参数,包括飞行高度、马赫数、进口空气流量Wa、各部件绝热效率η、各部件总压恢复TPR 因数、压气机压比πc、涡轮膨胀比πt和涡轮前温度T40,见表4。
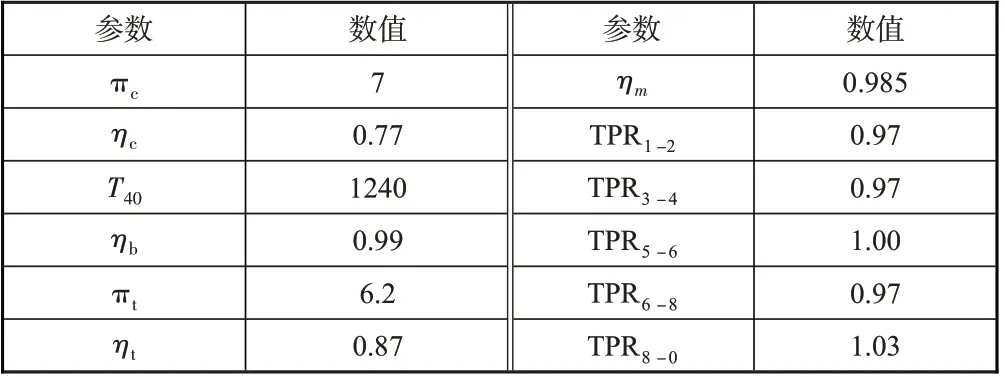
表4 燃气轮机性能参数Table 4 Parameters of gas-turbine
(2) 计算进气道出口处总温、总压
(3)计算压气机功率(不考虑放气)
(4)计算燃烧室燃油流量和涡轮总流量
(5)计算涡轮功率
(6)计算燃气轮机输出轴功率和对应的比耗油率
式中,SFC表示燃气轮机耗油量与输出能量之比。
代入地面工作状况H=0,Ma=0,利用上述模型计算,与商用软件Gasturb对比,结果见表5。

表5 本文模型与Gasturb软件对比Table 5 Comparison between this model and Gasturb software
二者误差为3.6%,因此本模型具有较高的精度。逆变器质量可用最大功率/功率密度(PD)的形式计算
电动机和螺旋桨质量可用最大功率/功率密度的形式计算
2.3 动力电池建模
本试验选用L148N50A 型动力电池作为参照,其相关参数见表6。
动力电池的内阻由欧姆内阻和极化内阻构成,即
动力电池的内阻和电压主要由荷电状态(SOC)和当前电池温度决定,由现有试验数据插值得到。
2.4 动力系统功率流模型
为使能源经济性最大化,要求燃气轮机全程在设计点附近工作,即在整个飞行任务中向推进系统提供相对恒定的功率PM。因此,某一时刻混合动力系统的功率输出由式(12)确定(放电模式下)
充电模式下,式(12)改为
式中,P为螺旋桨直接输出的推进功率;PM为燃气轮机输出的轴功率;PB为动力电池输出的电功率;dP为燃气轮机的冗余功率。ηshaft,ηconverter,ηmotor分别为燃气轮机发电系统效率、逆变器功率转换效率、电机效率。动力系统各部件功率密度和效率见表7。
不同模式下的功率分配情况如图9所示。当燃气轮机发电模组输出的电功率小于当前推进系统的功率需求时,系统处于共同工作模式,此时由燃气轮机和动力电池共同提供推进所需的电功率。当燃气轮机发电模组输出的电功率大于当前推进系统的功率需求时,系统处于充电模式,由燃气轮机提供推进所需的电功率,剩余功率用于充电。

图9 混合动力系统功率流Fig.9 Power-flow of the hybrid system
3 混合动力飞行汽车全任务剖面分析
由于燃气轮机功率已在动力系统优化模块确定,因此全任务剖面分析的目标是寻找恰好能满足飞行任务需求的电池单体数量,继而得到最优的混合动力系统设计参数,如图10所示。

图10 混合动力飞行汽车全任务剖面分析Fig.10 Full-mission analyze of the hybrid flying car
混合动力飞行汽车全任务剖面分析的流程为:(1)状态参数初始化:初始化飞行汽车重量、电池单体数量和电池状态参数;(2)根据任务进行时间计算当前推进功率,将功率分配给电池和燃气轮机;(3)计算当前电池功率需求,对于功率不足或电量不足(SOC低于下限)的情况,记录当前电池单体数量num0,在此基础上增加电池单体数量,退出当前迭代;(4)对于其他情况,更新动力系统参数;(5)判断任务是否结束,结束则退出迭代,否则更新至下一时间步;(6)若第一次迭代满足要求,则减少电池单体数量,继续迭代;(7)若电池单体数量满足要求,则退出循环,依据研究时的工业用电及航空煤油价格计算任务平均成本Ca和有效载荷占比
式中,Ca为单位航程载荷的成本;Ce为能源花费;Mpayload为有效载荷;MTOM 为最大起飞重量;Mbattery为电池重量;Mgenerator为燃气涡轮发电装置重量;Mstructure为维持整机结构稳定性需要的必要重量,约为起飞重量的30%[11];Mfuel为燃油重量;Ee为电能消耗。
采用上述分析方法,研究60~360km 航程下,1000~3000kg量级的飞行汽车任务平均成本和有效载荷占比与燃气轮机发电功率的关系。
4 结果分析
4.1 任务经济性分析
60~360km航程下,1000~3000kg量级飞行汽车单位航程载荷成本与燃气轮机发电功率的关系如图11所示。

图11 飞行汽车任务平均成本Fig.11 Mission economy of the flying car
对于1000kg量级的飞行汽车,在航程为60km时,其任务平均成本与燃气轮机功率呈正相关。在航程大于120km时,其任务平均成本均在燃气轮机功率为50kW 左右达到极小值。
对于2000~3000kg 量级的飞行汽车,在航程为60km时,两者任务平均成本均与燃气轮机功率呈正相关,但增长趋势较1000kg量级相对平缓。在航程为180km时,2000kg量级的平均成本在100kW左右达到极小值,而3000kg量级的平均成本呈递减趋势。在航程为360km 时,二者平均成本均呈递减趋势。
4.2 有效载荷占比分析
飞行汽车有效载荷占比与燃气轮机发电功率的关系如图12 所示。结果表明,1000~3000kg 量级飞行汽车有效载荷占比与燃气轮机功率呈正相关,且逐渐趋近于固定值。增加航程会使有效载荷占比下降,而提高燃气轮机功率等级能减缓这种趋势。
图12 飞行汽车有效载荷占比Fig.12 Payload proportion of the flying car
综合以上研究,混合动力飞行汽车对大航程、高载荷的城际间运输需求有较高的适应性。在飞行任务中,可以根据航程和载荷需求,寻找最优的燃气轮机功率,以达到最高的任务经济性。
5 结论
本文选用1000~3000kg量级的混合动力飞行汽车作为研究对象,分析对比了上述飞行汽车在不同功率等级涡轮轴发电装置配置下,在60~360km航程下的任务经济性及有效载荷占比。结果表明:
(1)航程在120km 以上的飞行任务飞行的平均成本有极小值,此时的燃气轮机功率在巡航功率附近。同时,飞行汽车的有效载荷占比与燃气轮机功率等级呈正相关。
(2)对于1000kg 量级的飞行汽车,在航程为60km 时,其任务平均成本与燃气轮机功率呈正相关。在航程大于120km时,其任务平均成本极小值约为0.004元/(km/kg)。
(3)对于2000~3000kg 量级的飞行汽车,在航程大于120km时,其任务平均成本极小值稳定在0.004元/(km/kg)左右。
因此,混合动力飞行汽车对于大载荷、长航程的城际间飞行任务有较好的适用性,且为使任务具有较高的经济性,应使燃气轮机功率在巡航功率附近。
本文未考虑燃气轮机在非设计点工作的情况,在后续研究中,会引入燃气轮机的非设计点性能仿真,使结果更能反映混合动力系统的动态性能。
