广州地铁车辆巡检机器人导航技术运用研究
2024-02-20赵仁龙
赵仁龙
(广州地铁集团有限公司 运营事业总部,工程师,广东 广州 510000)
0 引言
地铁车辆检修长期以人工检修为主,随着地铁运营里程的增加,车辆检修需求逐渐增高,人工检修作业周期频繁、工作量大、工作环境差,且多为夜间检修作业。人工检修采用传统的人工目视等检修方法,这种检修效率、安全性和可靠性等方面均存在不足。因此需要对智能化检修进行研究,以广州地铁九号线地铁巡检机器人为例,结合机器人调试与应用,对其导航技术做了研究,考虑引用机器人检测系统辅助地铁车辆运营,研究自动化检测系统,对提升检修效果,实现智能化、信息化、立体化检修具有一定意义。
1 常用的机器人导航技术对比研究
机器人检测系统需与地铁检修库内情况适配,地铁检修库存在以下几点问题:首先,地铁检修库内地形较为复杂,存在上下坡,地沟,支撑柱等多种影响机器人顺利移动的地形或障碍,机器人需要有较高的定位准确性,准确的得知障碍信息从而避障。其次,国内各地地铁的发展时间、水平和环境有所不同;不同城市和不同线路的车辆段检修库也会存在地沟宽度,地沟平整度和库内障碍的区别,机器人检测系统需有较高的环境适应性,从而减少为适配机器人检测系统而进行的库内改造。再次,机器人用于车辆的日常例行检查,使用频率较高,机器人检测系统需要有较高的使用稳定性,减少对系统的日常维护。最后,对于逐渐增加的运营里程和车辆配置数量,机器人数量也会逐渐增加,检测系统需要有较低的应用价格,从而增加机器人推广的可行性。
综上所述,适应库内的机器人检测系统需要有较高的定位准确性、环境适应性、使用稳定性和较低的应用价格。以这些特点为基准,分析了三种常用的工业机器人导航技术:循迹导航技术,二维码AGV(自动引导车Automated Guided Vehicle,AGV)导航技术和SLAM激光雷达导航技术,分析出基于SLAM导航的智能巡检机器人适合地铁检修需求。
1.1 循迹导航技术
循迹导航技术属于自动引导技术范畴。这种导航技术类似于轨道移动,被导航的机器人会随着预先铺设好的轨道或路径进行行动,具有运行稳定性较高,维护工作量较少的优点。最常见的应用案例像博物馆的导航机器人,因为该机器人只需在固定的展览位置进行移动,稳定性较高;并且机器人只需在固定位置对展览内容进行报告,工作量较少。
这种导航技术拥有较高适应性、稳定性和低价格的特点,但当机器人的行走路线需修改时必须重新铺设磁条,修改机器人导航路线工作量大、存在较大弊端,不适用机器人的精准、多变的检修特性需求。
1.2 二维码AGV导航技术
二维码技术原理是将数据存储在二维码标签中,通过提取获得定位和轨迹的一种技术[1]。包括五种导航方式,磁带导航、电磁导航、激光导航、视觉导航和惯性导航[2],但在地铁检修机器人应用中均存在不足。
磁带导航和电磁导航具有简单可靠、制造成本低和实现难度小等优点,但AGV运行路线一旦确定便难以修改,且导航路线容易受到周围金属物的干扰,因此局限性较大[3]。
激光导航通过激光反射板反射回的激光计算AGV的方向和实时位置,这种方法容易受环境中遮挡物于扰[4]。
视觉导航灵活性较高、应用范围广、成本低。但目前技术成熟度不高,利用视觉系统准确地实现路标识别这一技术仍处于技术攻关阶段[5]。
惯性导航利用积分计算AGV当前的位置和状态,以此确定自身运行航向。这种系统由于其自身传感器存在累计误差导致导航精度随运行时间下降[6]。
1.3 SLAM激光雷达导航技术
SLAM导航的全称为定位与地图建模导航技术(Simultaneous Localization and Mapping),该技术主要是利用激光或图像的技术,通过激光或图像扫描拍摄周围的环境来确定自己的位置,机器人不断在运动中观测环境,从而逐渐建立起运动环境中的地图,同时在运行中实时计算,计算出在每一个时刻机器人自身在这张地图中位置的过程。
SLAM激光雷达导航技术最重要的特点是导航技术的稳定性,机器人探测环境所用的各种传感器,地图构建的定位,都会存在误差。因此对于复杂的环境,不同的场景使用不同的传感器,需要做大量的实验来考证,寻求跟环境更适合的传感器来接受数据,选择合适的概率方法来提高准确性,而激光雷达可以提供高精度的环境信息。
国内SLAM研究虽然起步较晚,但发展迅速,不断优化,使其能在更复杂的环境内使用,SLAM技术具有较好的稳定性和适应性,理论上满足地铁车辆运维的需求,具体还应结合算法进行分析。
2 基于SLAM导航的智能巡检机器人
构架好环境地图,控制机器人进行导航实验。如图1中为基于SLAM导航的巡检机器人,它是一个由运动平台、六(前后左右上下)自由度柔性机械臂、图像采集模块、机器人控制单元、安全保护单元、机器人自动定位单元组成,实现机器人在车辆检修库内的定位、运动、图像采集、安全防护等功能。

图1 基于SLAM导航的巡检机器人
2.1 SLAM导航技术检测原理
机器人检测系统采用基于卡尔曼滤波算法的多传感器融合SLAM 定位技术,该定位方法可以简单描述为:机器人携带感知环境位置信息的各种传感器(激光雷达、编码器、测距传感器),从未知环境的初始坐标点出发,通过传感器对机器人的位置信息进行实时定位,从而用该位置信息进行地图的整体构建,利用地图信息获取机器人的确切坐标。如图2 所示为SLAM 算法实现过程,包括了“预测”→“测量”→“修正”的导航计算过程。

图2 SLAM算法实现过程
2.2 机器人在地铁车辆检修的应用
根据SLAM导航技术“预测”→“测量”→“修正”的过程原理,记录巡检机器人在广州地铁九号线车辆段运用库内预测,测量和修正的数值,从而判断SLAM 导航技术是否满足地铁行业的需求:具有较高的定位准确性,较高的环境适应性,较高使用稳定性和较低的应用价格。通过MATLAB 进行仿真分析,建立了具有障碍物的地图(如图3所示),用于测试SLAM导航技术的环境适应能力。在地图上可以确认机器人初步定位预测,机器人传感器定位位置和两者修正数值,之后对机器人实际位置进行测量,从而测试SLAM导航技术的定位准确性。
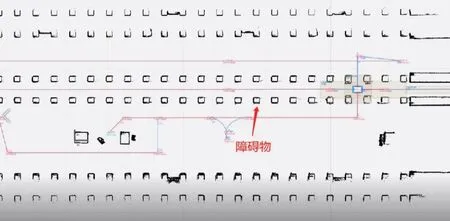
图3 具有障碍物的地图
2.2.1 环境适应性 机器人通过SLAM导航技术的特征、自身携带的传感器和构建的地图信息,从而准确的获得精确定位。自身携带的激光传感器用于判断机器人周围近距离内是否存在影响移动的障碍物,从而避免和障碍物发生相撞。根据实际运用情况,2020 年1 月1 日-2020 年12 月31 日,基于SLAM 导航技术的机器人在使用过程中,无机器人与障碍物相撞的情况,机器人可以适应地铁车辆段地沟的条件(如图4所示)。

图4 机器人在地沟运用照片
地铁库内车辆检修一般为一列车占用一条股道,检修要求库内的每条地沟均会停靠不同车辆,以满足多辆列车的同时检修需求。传统的机器人导航技术通常情况下只能进行单独到车辆检修作业,造成机器人自动检修作业的运用较难实现普及。广州地铁九号线检修机器人依赖准确的导航技术,设计了股道转运装置,实现了在股道之间自动切换,从而达到单台机器人覆盖多条检修地沟。
2.2.2 定位准确性 为了验证SLAM技术的准确性,在车辆段的地沟内进行试验,通过控制机器人行走,保证运行情况一致的前提下,进行多次坐标位置的记录。对机器人初步定位预测,机器人传感器定位位置,两者修正数值和实际位置量进行记录。根据每次位置记录可以得知,随着机器人在地沟的移动距离增加,机器人的定位预测和机器人的传感器定位差距在不断增加,这个时候SLAM 技术的数据修正功能会起到作用,修正数值大概在0~0.5 米。在SLAM 技术的传感器和修正功能共同工作下,修正后的机器人导航位置和实际位置非常接近,在120米的实验距离内,实际与理论差值<0.1 米(如图5所示),这可以证明SLAM导航技术机器人在地铁车辆地沟内,具有较高的定位准确性。

图5 机器人位置记录
2.2.3 设备稳定性 为测试SLAM导航技术机器人的设备稳定性,进行了机器人运动疲劳测试。通过地面设置长度50m 测试通道,在通道两端分别安装计数器探头,用来记录机器人往复运动次数,以此计算机器人累计连续行驶里程。控制机器人在通道两端之间持续往复运动,直到电池电量耗尽,然后通过更换电池方式快速恢复运行。通过记录机器人累计行驶里程来评价机器人的运行稳定性,连续累计行驶里程应不低于150km。实验测试运行速度约为1.2m/s,至本次测试结束时,连续累计行驶里程162.1km。以上实验(如图6 中测院实验报告)可以证明基于SLAM导航技术的机器人在地铁智能运营中有较高的稳定性。

图6 中测院实验报告
3 实际运用
采用SLAM导航技术的车辆检修机器人在列车检修运用,设置1个地面控制站,1套无线网络系统,充电桩。车辆检修机器人减少了人工检修工作量,实现对既有车辆修程优化,运用库由传统的双日检延长至八日检。机器人对每日的回库车进行全部的车底检查作业,仅安排人工进行每8 天进行一次列车全方位检查,具体流程如图7 所示。这种人机结合的方式,实现了地铁车辆检修体制的优化,提高了车辆检修质量及效率。

图7 人机结合的作业流程
经过现场的实际统计,2020年度总共累计完成检测模拟车辆574 列,共检测模拟故障8130 个。系统整体的缺陷检出率从最开始的61.35%提高到98.39%,系统误报率从6.57%下降到0.02%。
4 结束语
本文通过对几种常见导航技术的分析研究,结合车辆巡检机器人在实际地铁车辆检修中的应用表现,得出了SLAM导航技术具有较高的定位准确性,较高的环境适应性,较高使用稳定性,较低的应用价格,从而提出了SLAM 导航技术较为适合在地铁车辆巡检机器人的检修需求。这项技术在安全性、人工成本、时间成本、风险成本、管理成本等方面的表现也适应于轨道交通车辆的检修需求,对于保障城市轨道交通车辆的安全、准点运营具有较高的应用价值。