接触网隧道自动定位测量仪的研究设计
2024-02-20张少轩
罗 庆,张少轩
(1.中铁电气化局集团有限公司,工程师,四川 成都 610000;2.四川铁道职业学院,工程师,四川 成都 610000)
铁路隧道内施工主要包括测量、打孔、预埋螺栓及安装等工作,而接触网隧道测量工作是所有后续工序的基础。传统测量仪器主要包括全站仪,水准仪,钢卷尺等配合测量,各仪器的精准度与相互间配合精度容易产生误差;数据传输的通道稳定性较差,暂无有线和无线结合的通信方式;软件系统的开发和人机界面设置缺失;机械机构的稳定性和便携性能有待提高。
为解决以上问题,设计出接触网隧道自动测量仪,可提升测量稳定性,测量精度高,不存在多种测量仪器的相互间配合,整体的机械结构较为稳定,且方便携带。
1 接触网隧道自动测量仪设计
1.1 总体设计
接触网隧道自动定位测量仪主要包括如下功能模块,分别是电源控制模块、通信模块、中央处理器模块、电机控制模块。系统结构框图如图1所示。
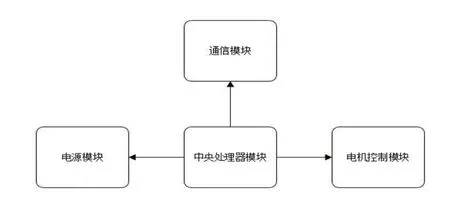
图1 系统框图
1.1.1 电源模块 设计电源采用DC12V 进行充电,内嵌锂电池,充电电流设计为1A~2A,电池容量为:4×3600mA,具备电源切换功能及放电保护功能。
1.1.2 通信模块 整个控制板采用无线网(WIFI)与手机进行通信,采用一体化WIFI模组加辅助保护电路作为移动端与主机的通信接口,采用贴片天线,内置于机体内。通信模块连接图如图2所示。

图2 通信模块
WIFI 发送接收控制电路通过芯片BQ25606 与微控制单元(MCU)进行协同管理,由MCU 中的嵌入式程序来处理各种接收或发送的指令,嵌入式程序设计包括看门狗程序,针对程序死机、连接不上等问题会自动处理并重连。
1.1.3 中央处理器模块主控芯片型号为STM32F40 5RG,该处理器是最新一代用于嵌入式系统的微处理器(ARM),以满足MCU 实现的需求,同时减少引脚数量和降低功耗,并提供卓越的计算性能和对中断的高效响应。该处理器具有良好的编码效率,提供了在内存大小为8 位和16 位处理器中的ARM 内核所期望的高性能。该处理器支持一套数字信号处理(DSP)指令,可实现高效的信号处理和复杂算法执行。中央处理器模块引脚使用情况如图3所示。
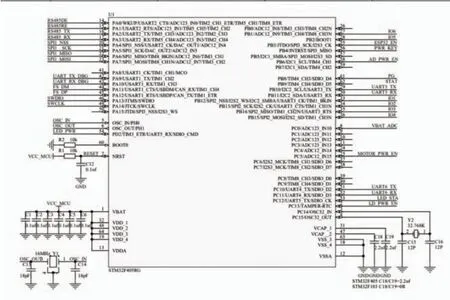
图3 中央处理器模块
1.1.4 电机控制模块 电机控制部分,选用的是高精度步进电机,通过控制保护电路来对电机的旋转角度进行控制管理,可以实现快速转动和慢速转动等。电机控制模块原理图如图4所示。
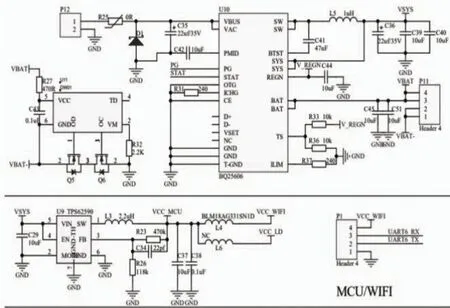
图4 电机控制模块
1.2 外部机械设计
1.2.1 支架 由于现场使用环境比较复杂,因此机壳设计过程中要充分考虑现场环境因素及地面不平等问题,设计时首选采用三角支架的方式,三角支架采用通用的仪器支架与现有铁路上的一些测量仪器,三角支架俯视图与三角支架总体示意图如图5、图6所示。

图5 三角支架俯视图

图6 总体示意图
1.2.2 底座调平 考虑到现场高低不平坦的地面,测试人员需要对设备的垂直度进行调整,设计在支架上方安装一个调整装置,工作人员通过选择转轴即可进行设备调平处理。底座调平装置如图7所示。
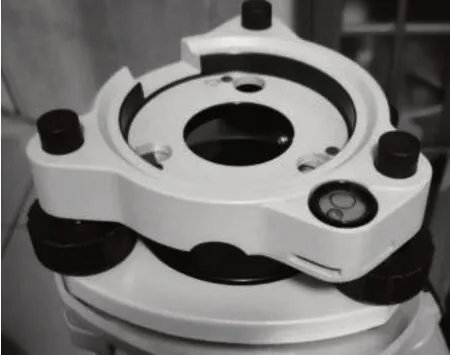
图7 底座调平
1.2.3 主机机体设计 主机整体设计采用U型设计,一侧为主机控制电路板,另一侧设计为减速步进电机,底部连接底座,中间位置为中空,设计高精度激光测距探头,可以进行360 度自由旋转,同时为方便携带,还设计有提手。主机机体设计如图8所示。

图8 主机机体设计
1.2.4 整机结构 整机结构示意图如图9所示。
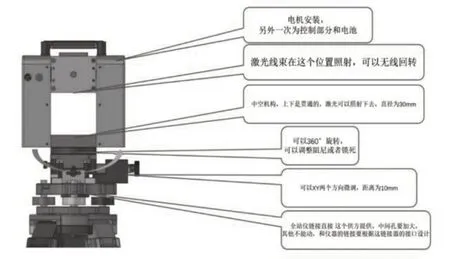
图9 整机机构示意图
2 方案实施
成都至川主寺(黄胜关)段位于四川省境内,起于成都铁路局青白江站,经茂县到川主寺(黄胜关),正线全长275.8km,全线新设车站12 个,本段线路含隧道17座共175.524km,占正线长度63.64%;隧道吊柱9428 根。隧道内测量压力较大,本测量仪可以根据预先输入的吊柱中心的限界值的理论参数,自动指示出隧道内吊柱的安装位置;根据预先输入的相应吊柱安装板固定孔与吊柱中心距离的理论参数,自动测量出固定孔对应的隧道壁高度,并计算出吊柱安装底板与水平面的夹角。具体操作步骤:(1)仪器摆放及调平设置:将仪器放置在标记的参考点位置,打开设备电源,等待完成仪器初始化设置。此时激光头处于垂直向下,将激光头射出的红点对准参考点,通过调平支架对仪器进行调平。测出一个远离基准点的参考点G 点,保证该点与参考点在同一条直线,并与激光头垂直。(2)将手机App 通过WIFI与设备进行连接。(3)打开激光探头。点击查找G点按钮,激光自动扫描。调整仪器,使激光光栅与G点重合,当G点找到后,按“设为零点”按钮则停止G点查找,激光回到原点位置。输入支柱号、距离数值,开始测量,激光自动进行相关找点动作。当完成找点工作后,“输出数据栏”输出测量数据。点击“保存”按钮,测量数据存入列表中,设备进行回原点动作,待激光回到原点后即可进行下一次测量工作。
可以通过手机App 的测距记录查看测量结果。具体的操作流程如图10所示:
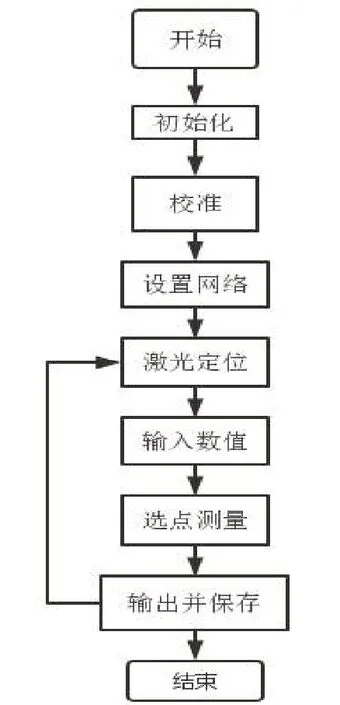
图10 操作流程图
隧道内吊柱施工一般在站前单位隧道贯通测量调线后至道床施工前最佳,为避免隧道内道床施工后材料运输困难,要求测量定位精准,从而计算出吊柱长度。隧道内数据采集示意图如图11所示。

图11 隧道内数据采集
图11 中,上底座高度h、底座间距h1、吊柱底部外露长度h2为设计已知量。
现场测得数据为:通过引桩测得红线标的标高H、激光测量仪标高H2、激光测量仪测得吊柱中心位置高度H3。
传统测量计算方法:
先计算出吊柱底部距轨面高度:
h-h1-h2=6.925-0.725-0.2=6m。
再换算出吊柱中心处对轨面的净空高度:
H-H2+H3=0.869-0.746+7.061=7.184m。
用以上数据计算出吊柱长度:
7.184-6=1.184m。
接触网隧道自动测量仪测量计算方法:
已知:h=6.925mm、h1=0.725m、h2=0.2m、H=2008.4405m。
近年来,虽然高等教育投入在逐年增长,但有些高校仍旧持续面临办学经费紧缺的窘境,诸多教学问题难以得到显著优化,其中实践教学问题尤为突出。部分高校虽然开始逐步优化实践教学,尝试应用“理实一体化”教学模式,但是应用经验不足,难以在短时间内显著提升实践教学质量[1]。因此,基于多元智能理论探究高校实践教学困境与出路,是加快优化高校实践教学、提升综合型人才培养质量的重要选择。
通过接触网隧道自动测量仪一次测量得出高程:
H2=2008.5638m、H3=7.061m。
先换算吊柱底座中心处隧道二衬高程:
地面高程+ 测得数据=2008.5638+7.061=2015.6248。
再用换算高程依次减去各设计高度的换算高程:
2015.6248-(H+h-h1-h2)=1.184m。
通过两种计算方式对比,采用接触网隧道自动测量仪可直接使用设计高程,消除了多台仪器造成的测量误差。
传统测量方式与隧道自动测量仪通过在不同支柱处进行测量比较,结果对比如图12 所示,实线为传统测量方式,虚线为隧道自动测量仪,两种方式测量结果基本一致,仅在个别支柱处存在误差,证明接触网隧道自动测量仪可代替传统的测量方式。

图12 测量结果对比
3 结束语
接触网隧道自动测量仪使得操作简化,满足操作人员可一人完成测量工作,减少数据反复记录带来的误差,利用激光进行距离、角度的测量,减少人工。在产品性能方面,实现了自动计算功能,系统可根据激光检测的数据,仪器内置程序准确判断仪器本身的水平面与测量点之间的高度及横向位置的偏差,以满足现场对吊柱限界的控制及计算吊柱长度计算所用数据的采集。同时可以进行数据的输入输出,可以将已知数据输入,激光采集数据,自动计算结果。此外添加了无线传输功能,通过无线传输功能达到手机与仪器的连接,使用手机进入仪器的数据输入页面,便于数据的输入输出,免去仪器调整好后受按键的外力影响而失去水平度。
在经济效益方面,使用此测量仪器简化了测量步骤,提高了测量效率及测量精准度,大幅度缩减了人工成本。