第21届亚洲物理奥林匹克竞赛虚拟实验第1题的介绍与解答
2024-02-20刘丽飒惠王伟张春玲孔勇发
刘丽飒,惠王伟,张春玲,王 槿,孔勇发
(南开大学 a.物理科学学院;b.基础物理国家级实验教学示范中心(南开大学),天津 300071)
由于疫情原因,第21届亚洲物理奥林匹克竞赛以虚拟设备、远程线上考试形式进行. 2022年春,南开大学物理学院教师带领中国国家队入选学生筹备第23届亚洲物理奥林匹克竞赛期间,备赛师生对此题进行模拟考试、试卷分析和经验总结. 本文简要介绍了第21届亚洲物理奥林匹克竞赛虚拟实验第1题:悬臂梁弹性.
1 试 题
在线考试需要安装Win10系统及8 GB内存的计算机. 实验考试软件程序将在2021年5月17日上传至2021APhO网站,网站链接通过电子邮件发给领队. 参赛人员下载有关的压缩文件至电脑. 解压软件程序需要口令密码,密码在考试前5 min由2021APhO网站公布并通过邮箱发送给领队. 在考试开始时,找到APHO.exe文件,双击文件图标开始考试. 其他考试流程与往届线下举办时相同.
1.1 实验背景介绍
悬臂梁是常见的力学结构装置,在工程结构设计中常作为抵抗剪切弯曲的主体构件,在其他非工程领域的应用也十分常见. 在应用物理领域,常需要分析纳米悬臂梁的弹性响应来阐释应力与应变之间的关系. 但是直接测量纳米材料的力学特性相当困难,只能通过不同于宏观单轴拉伸测量的压痕测试方法得到. 利用原子力显微镜或纳米压痕方式对纳米悬臂梁施加作用力,观测悬臂梁的弯曲形变推断其杨氏模量,成为测量纳米材料力学特性的重要方法之一[1-4].
1.2 题目介绍与分析
下面介绍考试题目各部分题面要求与分值(包括部分答题卡相关内容). 与以往亚奥赛题目需要对实体设备[1-4]介绍不同,对于虚拟实验,需要说明仿真软件界面以及操作效果. 本文不仅给出参考解答,考虑到实验结果误差,还给出评分标准拟定的数据测量正确范围,以及对实际操作难度分析与学生答题情况,以供参考.
在实验B~D部分为了便于测量,假定悬臂梁已处于稳定状态,即光学器件的震动不会影响测量结果,在实际操作过程中不需要在光路调整上花费大量时间. 在实验B~D部分,数据分析不要求计算标准偏差.
1.2.1 实验A.光路搭建(2.4分)
采用光学显微镜很难直接测量显微尺度的纳米悬臂梁的形变,所以利用激光的准直特性和反射特性并运用位置敏感探测器(PSD)进行测量[5-6]. 本实验所用的纳米悬臂梁长度L≈100×10-6m. 请运行程序1A.
A1.设计光路,使激光照在悬臂梁反光区域的中间位置,并确保激光点位置能够稳定在PSD显示屏的原点附近. 画出每个器件的相对位置 (坐标和角度). (0.6分)
A2.刚开始仿真时悬臂梁处于紊乱抖动状态,需要使其达到静止状态. 打开仪器后,光点在PSD上的位置图像和时间将显示在程序界面的右下方. 按下“记录”按钮后,每3 s记录1次环境扰动下的光点在PSD上的位置d. 至少记录40个数据点,然后按下“停止”按钮. (0.8分)

实验A部分对应仿真实验装置界面如图1所示,各模块的作用与操作方法:A.返回上一页;B.激光开关; C.激光器;D.反射镜:点击旁边的箭头精确控制该器件,或利用鼠标左键在水平方向拖动它;E.反射镜位置:坐标精度1×10-3m,方位角精度0.1°;F.位置敏感探测器(PSD):点击旁边的箭头精确控制该器件,或利用鼠标左键拖动它;G.PSD位置:坐标精度1×10-3m,方位角精度0.1°;H.PSD显示记录系统:此系统在竖直和水平方向的边界为±1×10-3m;I.PSD记录:开始记录按钮;J.PSD记录:停止记录按钮;K.PSD记录:记录复位按钮;L.PSD记录历史:读数精度0.1×10-6m,最大记录时长180 s. 可以在图表上利用鼠标左键或键盘箭头键查询所记录的数据;M.PSD记录频率:1 Hz;N.纳米梁载体:载体左上角位置坐标为(0,0),纳米梁安装在载体的顶部左边沿.
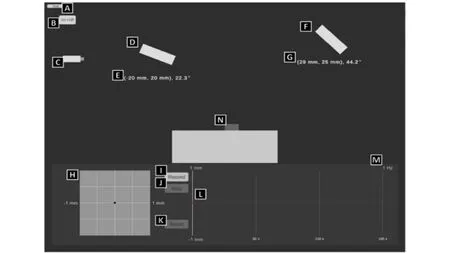
图1 程序1A对应仿真实验装置界面截图
1.2.2 实验B.悬臂梁的形变及杨氏模量的测量(2.4分)
悬臂梁材料的杨氏模量可利用原子力显微镜或者纳米压痕仪通过在其自由端施加外力的方式得到. 当给纳米悬臂梁施加力时,如果悬臂梁的形变量未超出材料的弹性限度,则其自由端的形变与外力之间的关系为[7]
(1)
其中,δ为弯曲形变量,F为施加在末端的力,l为悬臂梁长度,E为杨氏模量,I为悬臂梁截面惯性矩.截面惯性矩I是反映物体发生弯曲时横截面尺寸受形变影响大小的物理量,可通过积分计算.如图2所示,悬臂梁横截面高度为h,宽度为w,则其截面惯性矩为

图2 悬臂梁横截面示意图
(2)
实验所用悬臂梁的长度l=100×10-6m,宽度w=35×10-6m,高度h=0.20×10-6m.硅作衬底材料,其标准杨氏模量E=280×109Pa.
请运行程序1B,并回答B1~B3.
B1.设计搭建外作用力为0时的光路,使激光点打到悬臂梁反射面的中间位置,同时确保激光点在PSD上的位置稳定出现在PSD显示屏的中心附近. 记录数据,计算测量基准值d0.此时光点在PSD上的位置对应的位移Δd=0. 然后在悬臂梁上施加5种不同大小的外力,在答题纸的表格中记录实验结果. (1.0分)
B2.填写表格,作图(弯曲形变δ为y轴,光点在PSD上的平均位移Δd为x轴). (1.0分)

图3 光杠杆装置说明示图
1.2.3 实验C.双层悬臂梁(2.6分)
双层悬臂梁结是纳米工程应用领域常用的结构(例如集成印刷电路板或者纳米驱动器),由2层不同热胀系数的材料构成. 按照铁木辛柯厚梁理论(Timoshenko beam theory),需要考虑2种材料弯曲刚度的差别. 图4为由2层材料构成的双层悬臂梁,厚度分别为h1和h2,热膨胀系数分别为α1和α2,杨氏模量分别为E1和E2根据悬臂梁理论,对于2种材料的应力,可表示为[8]
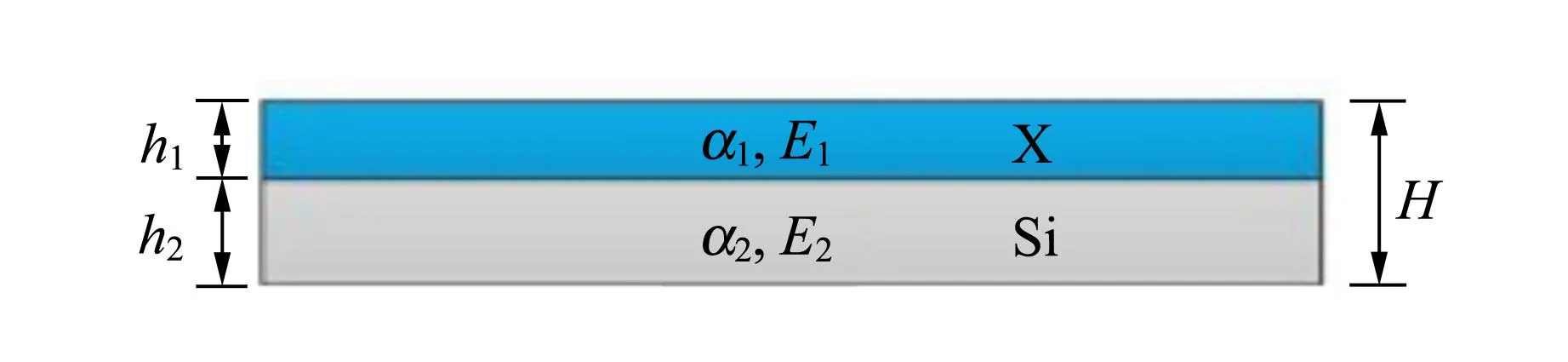
图4 2种材料构成的双层悬臂梁示意图
(3)
(4)
其中,ΔT为温度改变量,Pi为净作用力,r为曲率半径,α为热胀系数.若要使作用力被抵消,则合成力矩M与净作用力Pi的关系为
(5)
合成力矩M可以表示为
(6)
其中,EiIi为弯曲刚度.此边界条件要求应力连续,亦即γ1=γ2,进而可得到:
(7)
δ=κl2.
(8)
本实验相关参量取值为:h1=0.04×10-6m,h2=0.2×10-6m;α1=14.2×10-6K-1,α2=0.8×10-6K-1;I1=1.867×10-28m4,I2=2.333×10-26m4.参量l,w,E的数值与其在实验B相同.
请运行程序C1并回答C1~C3.
C1.要求激光束照在梁的反射面中心位置附近.记录室温,找到测量基准d0,以此为基准对应Δd=0.然后升温,当双层梁达到稳定状态时记录数据.至少测量5种不同温度情况.(1.0分)
C2.填写表格.以弯曲形变量δ为y轴,温度T为x轴作图.通过数据分析计算斜率.可以使用B3中δ和d的关系式.(1.0分)
C3.利用C2的数据结果计算上层材料的杨氏模量.(0.6分)
1.2.4 实验D. 测量悬臂梁因吸附分子引起的弯曲(2.6分)
复合悬臂梁不仅可以作为纳米驱动器,还可以作为纳米传感器. 图5所示为由双层悬臂梁构成的纳米蛋白质传感器,其表面融合有微流体通道,并涂敷1层蛋白质. 当有其他生物蛋白质分子吸附到梁的表面时,由于吸附分子之间的范德瓦尔斯相互作用力,使得这种蛋白质吸附作用在悬臂梁上产生表面应力以及可观测弯曲形变[9]. 对于特定的蛋白质,这种应力的分布是唯一的. 实验所用双层悬臂梁结构与实验C部分完全相同(图4). 样品0和样品1的覆盖率Rc分别为0和1%. 由于悬臂梁涂层分子的量很少且覆盖率较低,因此可忽略其厚度及杨氏模量的影响. 假定有效弯曲刚度EI*≈1.84×10-13N·m2.
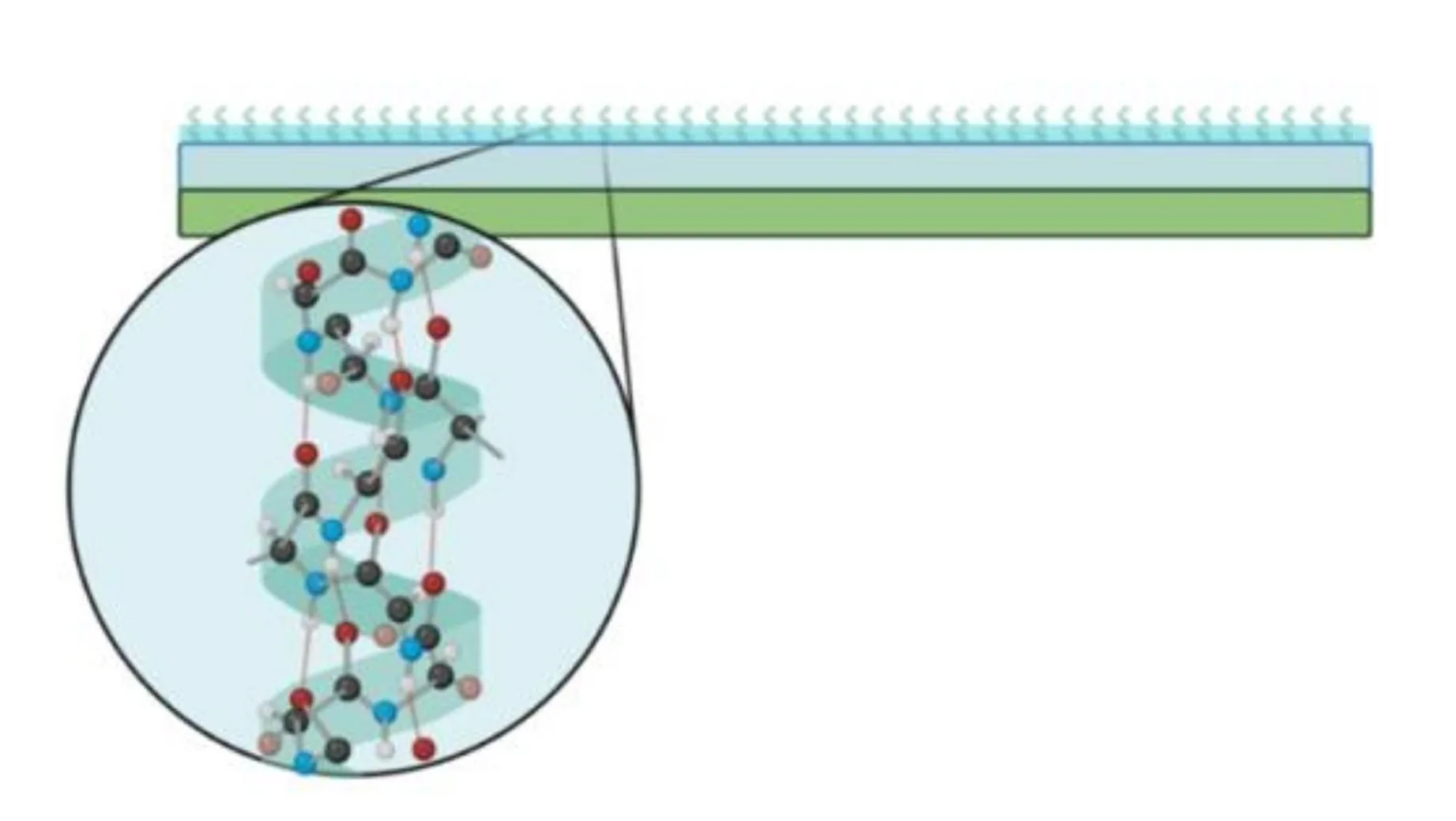
图5 用作纳米传感器的双层悬臂梁(上层涂有蛋白质)
请运行程序D1,并回答D1~D4.
D1.针对样品0设计搭建光路,使得反射激光点位于反射区域的中心,亦即激光点在PSD上的位置稳定出现在 PSD屏的原点. 记录测量基准d0,此时设定激光点的位移Δd=0.然后换样品1重复此实验过程. 答案记录在答题纸的表格中. 注意所有样品中,样品1的覆盖率RC最高. (0.6分)

D3.换用样品2和样品3,这2个样品吸附分子种类相同但覆盖率RC不同. 分别测量激光点在PSD上的位移Δd. (0.8分)
D4.估算样品2和样品3的RC(用百分数表示). (0.6分)
1.3 实验操作与效果
1.3.1 实验A
点击激光开关B,C模块显示红色激光光线,照射到D反射光线显示一段后消失,如图6所示. 需要调整D让光线反射到正确方向(载体N的顶部左边沿),该过程需要用鼠标仔细拖动D至正确位置附近,并点击旁边箭头进行反复试探性微调,直到有经过纳米悬臂梁的反射红色光线在界面中出现,才能进行下一步光路调整. 整个过程与实际光路中的摆放位置选择和微调过程类似,需要操作者的经验和耐心才能准确实现. 模块F也需要类似这样的调整,直至H上出现观察测量所需要的光点,并需要进一步上下左右细调G,才能让H记录屏上的光点移动到屏幕中间. 以上过程中,程序模拟了几种抖动因素的影响,每按动1次装置中的任意微调旋钮,H记录屏上的光点就会在屏上不停抖动,需要一定时间才能稳定. 这也逼真地模拟了实验光路调整过程中的真实情况,增加了学生操作过程中的难度.

图6 装置调整过程中红色光路指示线随操作变化
A1部分的参考解答见图7,要求绘制出激光器、反射器、悬臂和PSD相对正确的位置、激光路径、标出反射镜和PSD的坐标与角度.

图7 A1部分参考解答
A2部分要求数据量不少于40组,位置在时间段前、中、后期的波动在10-3,10-4,10-5m量级的数目均不少于10个,参考解答见表1.

表1 A2部分数据记录表
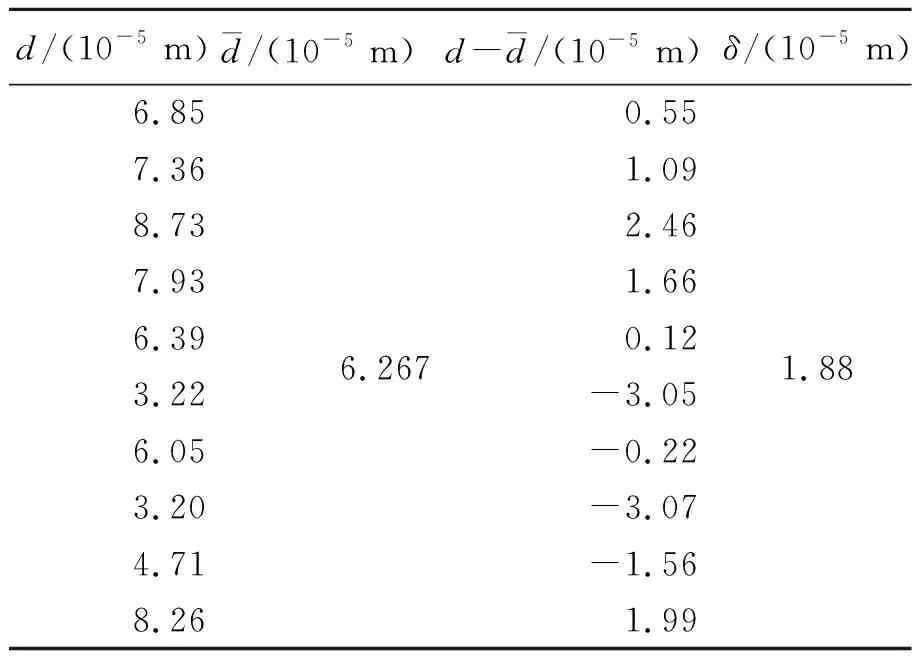
表2 A3部分数据记录表
实际操作中表现为数据波动随机但总的趋势逐渐稳定,稳定需要的时间小于120 s(图8). A部分操作过程学生需要熟悉软件,进行精细调节,实验操作难度最高,也是模拟考试中师生失分最多的题目. 笔者在完全熟悉软件操作基础上,通过观察记录屏H上光点动态变化时的浮动量和浮动中心,进行快速调整,采集数据时间延长到系统基本完全稳定,得到基准线在0.9×10-5m,证实了参考解答的精度完全可以实现.

图8 A部分操作时数据浮动至稳定示意图
1.3.2 实验B
B1部分软件操作效果见图9,参考解答见表3. 评分要求测量基准值d0=±3×10-5m方可取得满分.

表3 B1部分位置基准线测量数据记录表
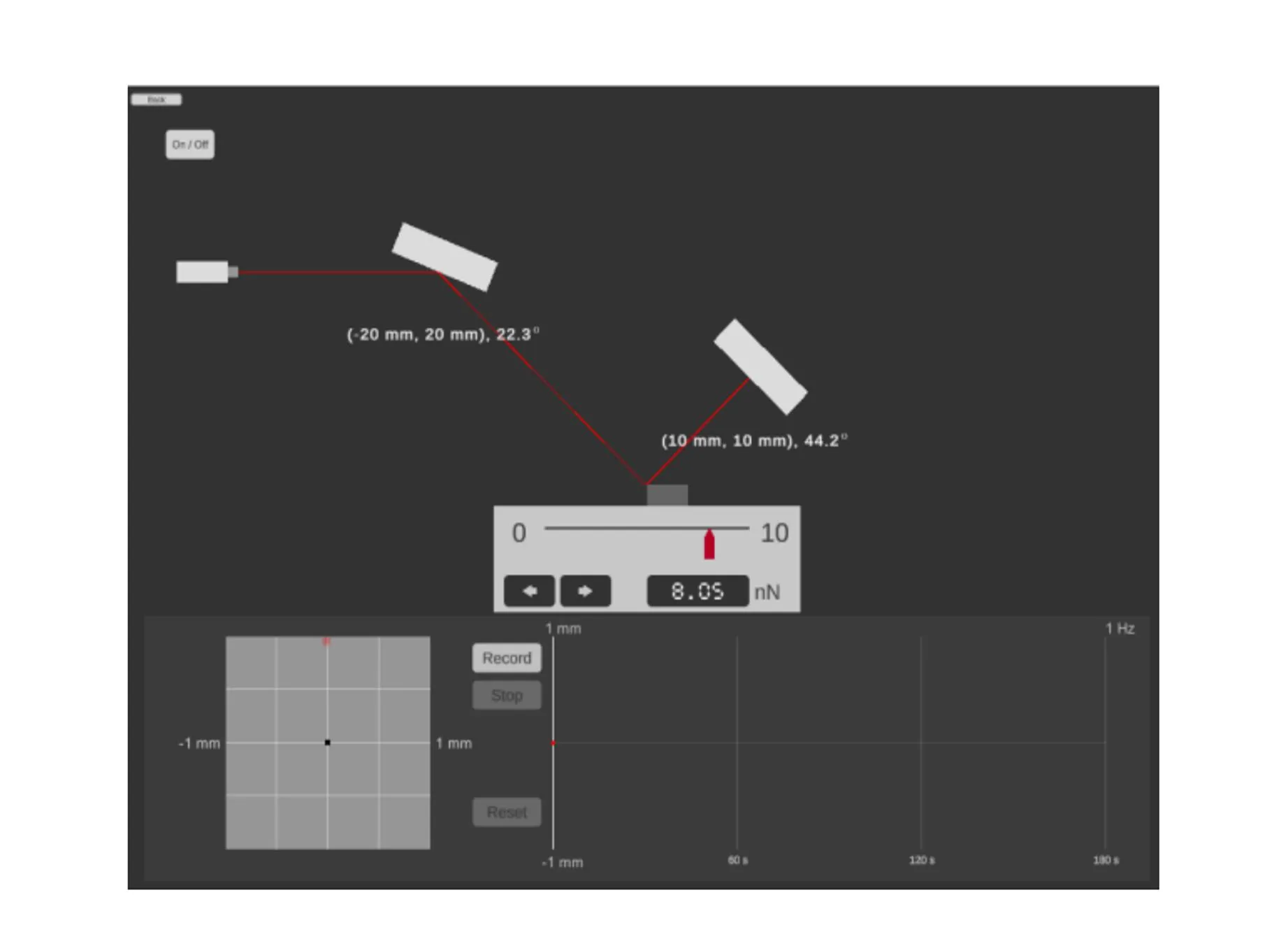
图9 B部分软件操作效果示意图(可测量的外力最大值8.05×10-9 N)
B2参考解答见表4、表5以及图10. B3参考解答C1=5.196×104. 评分要求C1=(4.9±0.5)×104方可取得满分.

表4 B2部分测量数据记录表
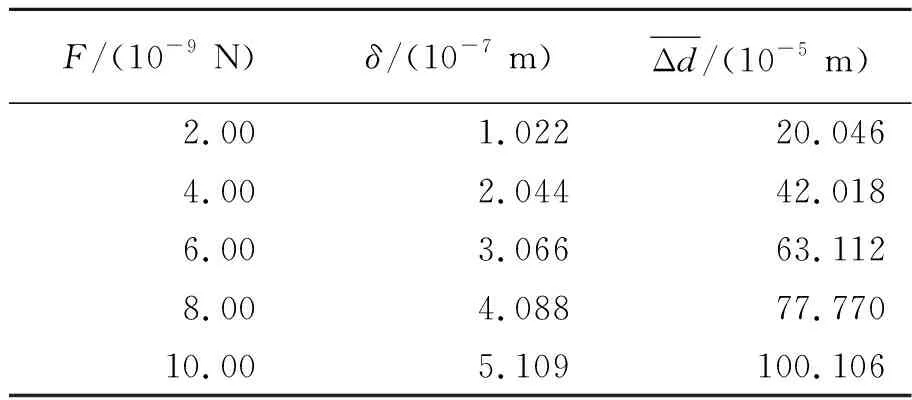
表5 B3部分实验数据记录表

图10 B3部分数据处理参考图
学生在外作用力为0时没有调节光路确保光点在PSD显示屏的中心,基准线结果偏离评分要求. 实验C和D部分对基准调节精度的评分要求与之相同,学生失分情况类似. 在B2部分实际操作过程中,如果学生测量的范围比较小,那么回归系数C1的准确性将会受影响而导致失分. 实验C和D部分学生也有类似的失分情况. 在不同的光路调节情况下,可测量的外力最大值为6.50×10-9~9.45×10-9N,得到的实验结果与参考答案的要求范围有出入. 实验C部分也有类似情况.
1.3.3 实验C
C部分软件操作效果见图11,参考解答见表6、表7和图12,直线斜率为1.337×10-7m/K,上层材料杨氏模量为4.98×1010Pa.评分要求:作图的直线斜率1.0×10-7~1.5×10-7m/K,上层材料的杨氏模量3.0×1010~6.0×1010Pa.

表6 C2部分实验数据记录表

表7 C3部分实验数据记录表
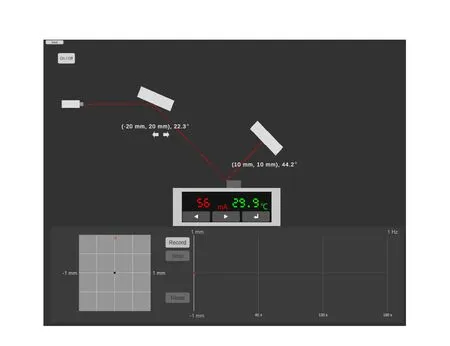
图11 C部分软件操作示意图

图12 C3部分数据处理参考图
1.3.4 实验D
D部分软件操作效果见图13,D2参考解答见表8. 根据D2中的数据估算C2=-7.89×10-2N/m,D3参考解答见表9,样品2和样品3的RC分别为 0.738%和0.298%. 评分标准C2在-7.0×10-2~-8.0×10-2N/m,样品2测量值Δd在-6.3×10-4~-5.7×10-4m,样品3测量值Δd在-2.7×10-4~-2.1×10-4m. 样品2的RC在0.6%~0.8%,样品3的RC在0.25%~0.35%.
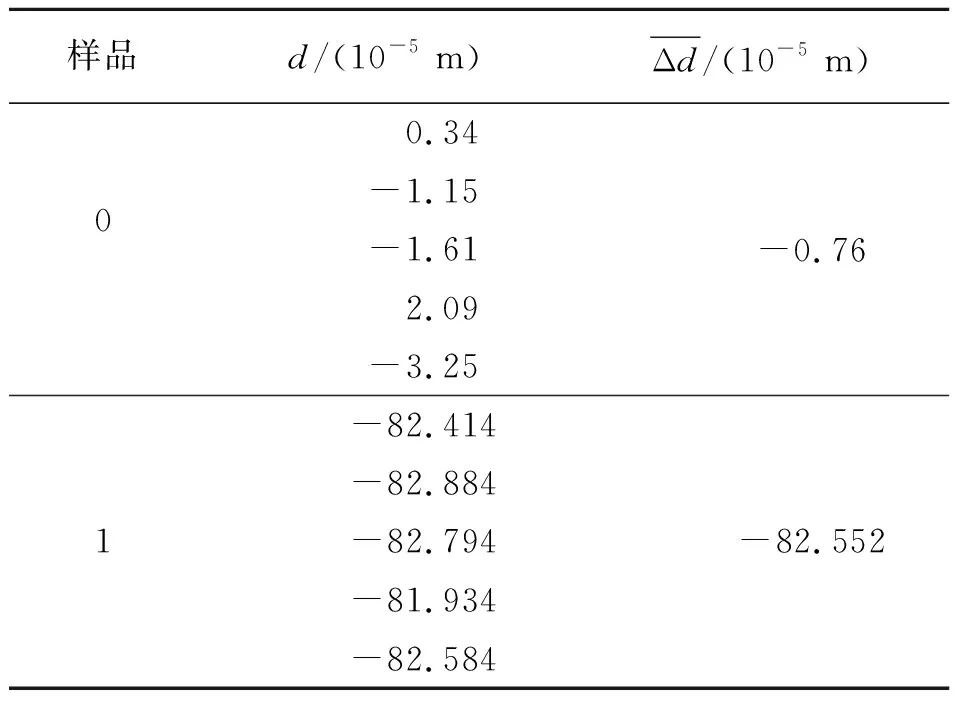
表8 D2部分实验数据记录表
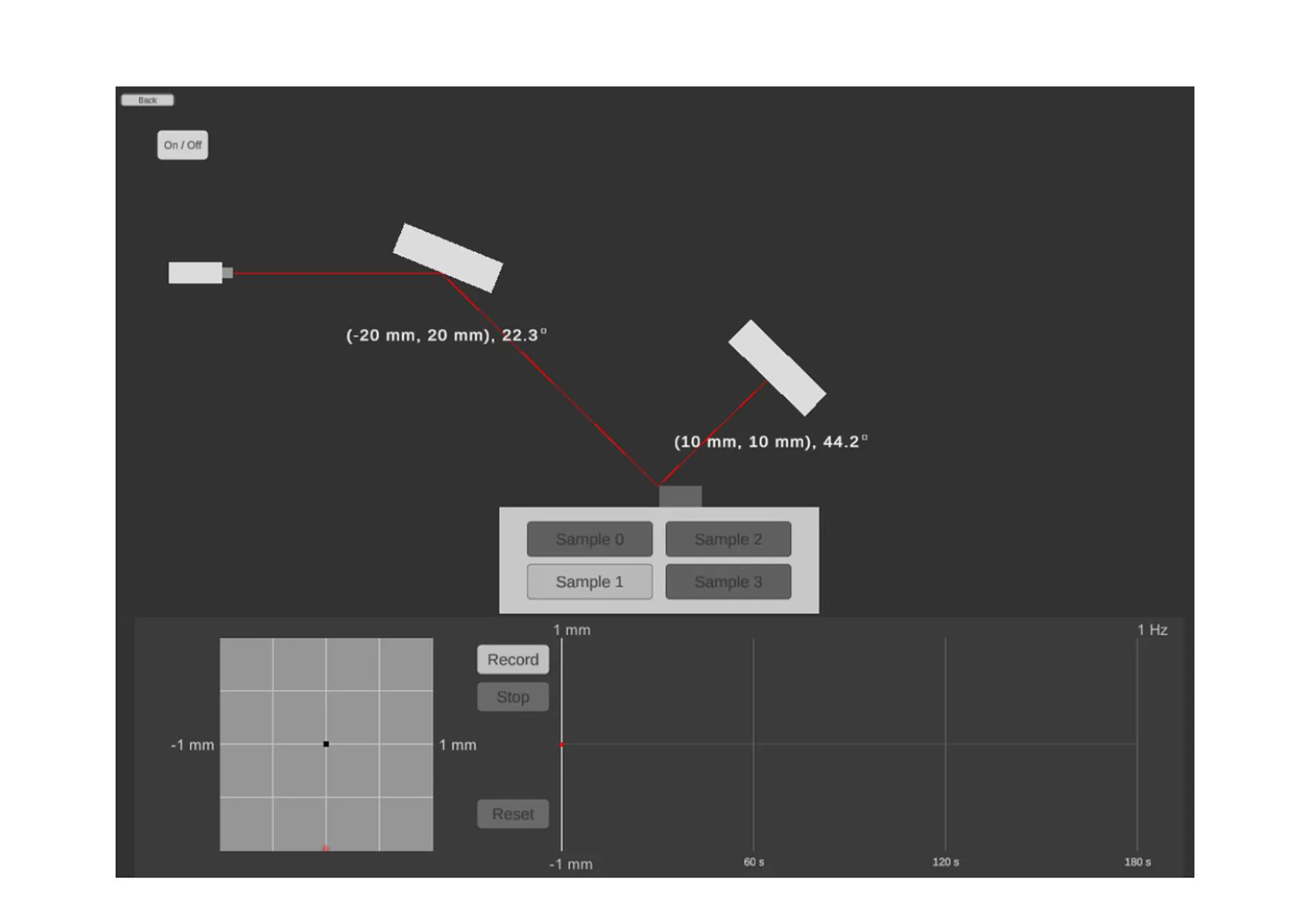
图13 D部分软件操作示意图(样品1的位置偏移恰能测量)
学生在实际操作过程中如果对光路调整不适当,有可能换样品1后激光点在PSD上的位置超出量程. 有的学生利用样品0放置时激光点在PSD上的位置没有在原点附近,而是偏置在原点下方,来确保测量到换样品1后激光点的位置,这样操作能完成测量,但会导致实验D的各部分均有扣分.
2 试题评析
国内也有基于LabVIEW开发的悬臂梁虚拟仪器以及虚拟实验[10-11],本题是将科研虚拟仪器或者高校教学成果中的虚拟实验转化为竞赛虚拟试题的实例. 通过该虚拟实验,学生可以学习光杠杆放大的基本原理;利用虚拟程序理解环境抖动对光学精密测量的影响;理解光路的粗调和细调的作用;掌握曲线改直和最小二乘拟合直线方程回归;实验数据范围和间隔选取的方法. 该实验题可以实验线下课程中无法完成的内容:微米结构材料梁测量纳牛力引起的微小形变及其应用. 将其通过虚拟的方式形象生动地展示出来.
在物理奥林匹克竞赛备赛过程中,备赛师生对本题进行了实践,总结了几点经验:很多师生在A部分的光路调整中没有达到参考解答的精度,这是对虚拟仪器的精度探索理解不深造成的. 备赛师生在B,C和D部分实验中没有按照题目的方法进行仪器零点位置的准确定标,说明对此类测量仪器的定标原理不熟悉. 笔者在反复调试虚拟仪器后发现,仪器的输出结果与初始的调整状态有关,然而评分标准并没有考虑到此情况. 实际参赛时,带队教师需要针对这一问题造成的学生成绩误判进行重点申诉仲裁.
3 在本科教学中的推广
使用本虚拟实验,南开大学进行了非物理类本科生教学实践. 实践经验表明:医学专业学生可以了解一种对生物蛋白分子覆盖率的微观检测手段,软件专业学生可以了解软件在物理虚拟实验开发中的作用与效果. 该实验是对本科虚拟实验教学内容的有益补充.
