基于自主航行系统的无人船海上航迹多目标控制技术研究
2024-02-16毛炼刘鑫
毛炼 刘鑫
中海油安全技术服务有限公司湛江分公司 广东 湛江 524057
引言
由于我国海域辽阔,开发并利用海洋成为我国发展的重要战略方向,因海上航运活动的不断增加,导致海上事故频发,严重制约了我国海洋业务的可持续发展。随着信息化技术的迅猛发展,无人船项目被世界各国所重视,其可以按照要求进行自主循迹、目标识别等任务,从而应对复杂多变的海洋环境。因此,无人船在海上自主航行时,需要精准控制无人船的航迹,确保无人船可以安全作业在海上。这就设计了航迹控制问题,我国众多学者针对该问题纷纷展开相关研究,罗飞[1]等人基于逆反馈控制中的增量动态逆方法设计一种航迹控制技术,可以快速修正控制目标的航迹误差;杨忠凯[2]等人提出一种基于LOS和ADRS相结合的航迹控制方法,以此实现复杂环境下航迹的精准控制。无人船自动驾驶是实现海上自动化、智能化作业的关键功能,海上航迹多目标控制误差小的话,可以降低无人船意外事故发生的概率,从而提高航行的安全性,所以本文研究无人船海上航迹多目标控制技术对我国海上巡航等工作具有十分重要的现实意义。
1 基于自主航行系统的无人船海上多目标航迹规划
一般来说,无人船海上航迹多目标控制的主要目的是以最小的误差确保目标按预定义的航迹航行,避免无人船与其他船只、浮标、礁石等障碍物发生碰撞,从而降低碰撞风险,提高无人船航行的安全性。针对该特点,通过使用雷达、激光等传感器设备来监测周围环境,并实施安全路径规划。所以本章着重探讨无人船海上安全航迹的规划问题[3]。考虑到无人船的特点与海域环境的复杂性,本文引入了自主航行系统来规划无人船海上航迹,自主航行系统是一种通过获取无人船自身姿态信息与海域航行坐标数据,来协助无人船运动的系统,在无人船的航行过程中,该系统可以利用GPS、激光雷达等装置实时采集无人船自身坐标点与周围环境信息。由于自主航行系统采集模块易被外界噪声等因素干扰,导致采集数据存在误差,因此,需要预处理自主航行系统采集数据,对于本文研究的无人船,可以通过航行距离与速度描述无人船的状态,假设无人船在海上匀速航行,那么无人船的状态向量T:
式中,X、Y分别表示无人船在二维空间中X、Y方向上的航行距离;VX、VY分别表示无人船在二维空间中X、Y方向上的航行速度。
根据式(1)获得无人船的状态向量,可以根据多个目标,确定多个无人船的状态向量,设目标数量为n,获得状态向量集合,公式为:
根据公式(2)获得的多目标的无人船的状态向量,即可构建无人船的预测状态方程,表达式如下所示:
式中,T' 表示无人船的预测状态向量;Z表示状态转移矩阵;φ表示外部影响因素。
采用Dijkstra算法动态规划无人船海上安全航迹。Dijkstra算法是在广度优先搜索算法的基础上引入了从起始点到当前节点的代价,其核心思想在于每次找到距离源点最近的一个顶点,然后以该顶点为基准扩展搜索范围,最终求得源点到其他所有点的最短安全路径,则基于自主航行系统的无人船海上多目标安全航迹规划公式为:
式中,Dijkstra(⋅)表示无人船海上航迹规划算法的代价函数。
2 无人船海上航迹多目标跟踪控制
在文中上述内容的基础上,本文设计一种由动态神经网络结合扰动观测器组成的复合控制器,以此跟踪多目标无人船海上航迹,促使无人船实际航迹与预设航迹之间误差最小,即可实现航迹的跟踪控制[4],提高无人船海上航行的安全性。首先,本文综合考虑无人船控制过程中外部扰动问题,以此降低航行的安全风险,因此,将上述获取的无人船海上多目标航迹规划f(x),作为复合控制器的一项输入,则设计复合控制器公式为:
式中,S0表示复合控制器中动态神经网络模块的输入;S0表示复合控制器中动态神经网络模块的输出。无人船海上航迹多目标控制技术是将求解问题转化为受约束的二次代价函数,为保证多目标的无人船可以稳定安全地按照规划航迹航行,需要将无人船的规划航迹控制向量与无人船状态偏差当作复合控制器的输入向量,当输入向量经过复合控制器的动态神经网络模块时,可以预测各个无人船的状态,进而实现无人船海上航迹的多目标跟踪,输出一个无人船海上航迹的规划数据和实际数据之间偏差,作为复合控制器的控制律,再将其自动输入控制器的扰动补偿观测器模块,通过该模块抑制扰动影响,从而降低无人船海上航迹规划数据和实际数据之间的偏差,以此作为最终的控制信号,将其输入待控制目标,完成无人船海上航迹多目标控制,从而降低无人船海上航行的安全风险,则更新后的无人船海上航迹多目标跟踪控制为:
式中,ε表示无人船海上航迹规划数据和实际数据之间的偏差,S'表示实际数据,表示控制器系数。
至此完成基于自主航行系统的无人船海上航迹多目标控制技术设计。
3 实验分析
为验证本文研究的基于自主航行系统的无人船海上航迹多目标控制技术的可行性与可靠性,本章将采用MATLAB软件分析四个控制目标在交会场景下的跟踪控制效果。本次实验中,以本文设计方法为实验组,并采用基于微分平滑的无人船海上航迹控制技术、基于耗散理论的无人船海上航迹控制技术为对照组,设定如下:无人船a、b、c、d在给定的区域内模拟海上航行,航行过程中作各目标匀速直线运动,整个航行过程中,无人船a会先后与无人船b、c、d相交会,交会是多目标在一定时间内接近后分离。在上述实验场景中,分别采用实验组与对照组方法控制无人船a、b、c、d进行航行,所得跟踪控制结果如下图所示:
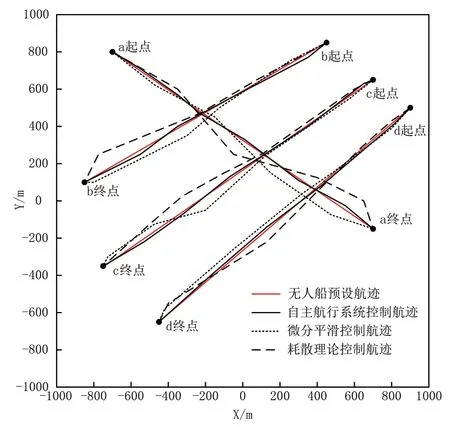
图1 无人船海上航迹跟踪控制结果
上图展示了无人船a、b、c、d在给定区域内全程的跟踪控制航迹,从图中可以看出,在无人船a、b、c、d交会前,无论是实验组还是对照组方法,均可以较为精准地控制无人船按预设航迹航行,但是在无人船a、b、c、d交会后,两种对照组方法下各无人船海上航迹跟踪控制误差明显提升,实际航行轨迹严重偏离预设航迹,这主要是因为当多个无人船接近时,势必会造成跟踪门重叠,进一步引发航迹跟踪控制误差,可能导致船只发生碰撞,存在安全风险,但是本文设计方法在一定程度上可以改善无人船海上航迹多目标跟踪控制误差,无论是交会前还是交会后,各无人船航迹控制误差幅度均较小,可以有效避免船只发生碰撞,从而避免安全事故的发生[5]。此外,为更直观体现出本文研究技术的控制效果,在无人船a、b、c、d整个航行过程中,统计各方法下无人船海上航迹的累积跟踪控制误差,结果如下表所示:
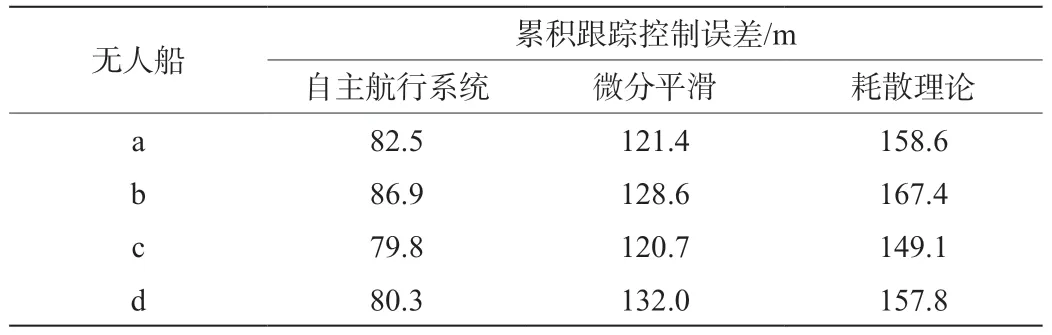
表1 不同方法下无人船海上航迹跟踪控制误差
如表所示,在本文设计的无人船海上航迹多目标控制技术下,每一艘无人船的航迹累积跟踪控制误差平均值为82.4m,较对照组方法降低了43.4m、75.8m。由此可以说明,本文设计控制技术是有效且正确的,可以收获较为理想的无人船海上航迹多目标控制效果。
4 结束语
为了降低无人船海上航迹多目标控制误差,从而降低船只航行的安全风险,本文研究一种基于自主航行系统的无人船海上航迹多目标控制技术。海上自动驾驶是无人船的核心功能,而本文研究则是海上自动驾驶功能的重要组成部分,文中利用自主航行系统规划了无人船海上航迹,构建一个复合控制器跟踪多目标,从而控制无人船按规划轨迹安全航行。通过实验验证了研究技术的跟踪控制性能十分优越,可以满足无人船海上航迹精准控制需求,从而提高无人船航行的安全性。

