焊接机器人工作站可视化远程运维系统研究
2024-02-09杨素珍沈碧桦吴海端

摘"要:为了解决传统人工运维管理方法效率低、成本高、成效差等问题,提高焊接机器人工作站的安全性和可靠性,提出一种结合数字孪生技术的焊接机器人工作站可视化远程运维系统。基于B/S架构,采用MVC设计模式开发Web应用系统,对系统功能进行模块化设计,降低系统整体耦合性。利用封装WebGL的第三方库Three.js创建工作站模拟场景,与各物理单元同步映射,实现数据孪生,实现对工作站的三维实时可视化监测。通过对所开发系统的操作测试,证明了该系统满足实时性、数字交互性和可配置性要求。
关键词:焊接机器人工作站"远程运维系统"数字孪生"Web可视化交互
中图分类号:"TP274
Research"on"Visual"Remote"Operation"and"Maintenance"System"for"Welding"Robot"Workstation
YANG"Suzhen"SHEN"Bihua"WU"Haiduan
School"of"Intelligent"Manufactuing,"Zhangzhou"Institute"of"Technology,"Zhangzhou,"Fujian"Province,"363000"China
Abstract:"In"order"to"solve"the"problems"of"low"efficiency,"high"cost,"and"poor"effectiveness"of"traditional"manual"operation"and"maintenance"management"methods,"and"to"improve"the"safety"and"reliability"of"welding"robot"workstations,"a"visual"remote"operation"and"maintenance"system"for"welding"robot"workstations"combined"with"Digital"Twin"technology"is"proposed."Based"on"the"B/S"architecture,"it"develops"a"web"application"system"using"the"MVC"design"pattern,"modularizes"system"functions,"and"reduces"overall"system"coupling."It"builds"a"workstation"pseudo"scene"using"the"third-party"library"Three.js"that"encapsulates"WebGL,"synchronizes"mapping"with"its"various"physical"units,"achieving"data"twin,"and"realizing"real-time"3D"visualization"monitoring"of"the"workstation."Through"operational"testing"of"the"developed"system,"it"has"been"proven"that"the"system"meets"the"requirements"of"real-time"performance,"digital"interactivity,"and"configurability.
Key"Words:"Welding"robot"workstation;"Remote"operation"and"maintenance"system;"Digital"Twin;"Web"visualization"interaction
焊接机器人工作站是目前最常用的焊接自动化装备[1],其能够极大地提高焊接生产效率并保证质量,进一步减少人工介入,提升生产空间,降低投资成本。随着物联网、大数据、云计算等信息技术广泛应用于生产制造领域,机器人采用远程运维手段成为一个重要发展趋势,国内外学者对此进行了较多的研究。SABRY"A"H等人[2]远程监控工业机器人的功耗进行故障检测,获取实时数据与预先指定任务正常工作的关节数据比较,预测排除潜在故障。许向南等人[3]远程监测工业机器人的真实运作情况,实时采集并存储机器人的运行数据,方便数据的处理与历史数据的回顾。可视化是目前装备远程运维技术的研究热点之一,可以大大提高装备远程运维的便捷性和效率。杜莹莹等人[4]基于数字孪生对工业机器人进行实时可视化远程监控,实现对实时运行数据的采集与传输,并在建模的虚拟单元上映射数据。MOURTZIS"D等人[5]设计和开发数字孪生,创建能够对工业设备进行预测维护合适的框架,基于仿真模型并分析收集的数据来预测设备未来可能出现的故障,提高设备的可用性。现有焊接机器人工作站的运维系统大多以数据信息管理为主,功能单一,缺乏可视化手段,适用性十分有限。鉴于此,本文提出一种基于远程监测技术和数字孪生技术的焊接机器人工作站可视化远程运维平台,克服工作站间的数据交互困难,简化信息的记录与管理;通过三维模型可视化映射现实焊接机器人工作站,数字交互仪监测工作站及其各部件的状态,实时评估工作站当下的装备性能及故障隐患。
1"系统总体架构与功能设计
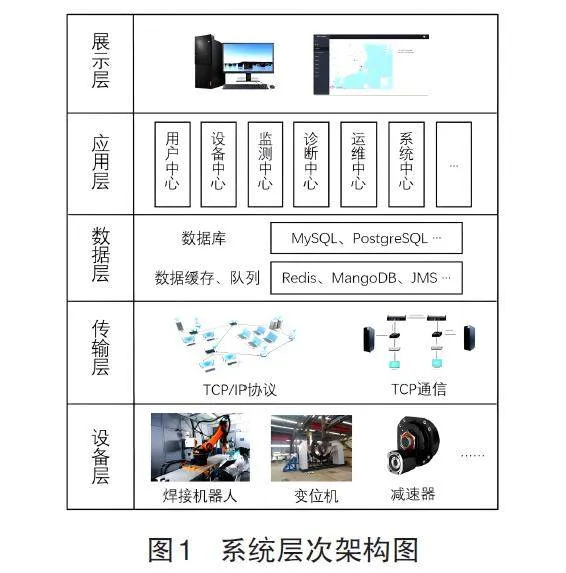
系统采用B/S(浏览器/服务器)架构,通过浏览器即可完成客户端的操作[6],系统后续的升级和维护不需要担心所在运行计算机硬件的兼容性。在参考传统MVC设计模式的基础上,系统层次架构如图1所示,细分为设备层、传输层、数据层、应用层和展示层,从而将业务逻辑、数据、界面显示分离,实现模块间耦合性降低。
系统采用模块化设计,同时需要考虑业务逻辑实现的可行性以及各功能之间的联系,处理好公共资源的更新与同步。主要功能模块设计如下。
1.1"首页
导入百度地图插件,根据数据库信息在地图上显示已建立工作站;点击地图上工作站图标显示一些基本信息;通过链接跳转到查看工作站详细信息;查阅管理员所发布通知公告。
1.2"用户中心
进行对注册用户信息的增删改查;管理用户权限,初步将制定三级权限(超级管理员、工作站管理者、工作站运维人员)。
1.3"工作站及设备中心
实现对工作站及设备的增删改查;可上传工作站设备图片、工作站三维模型、基本操作手册等文件。
1.4"数据中心
通过通信协议,实时接收更新外部打包的数据存入数据库以实现数据存储及查询;数据图形可视化,将接收到的数据通过曲线图等形象地表示。
1.5"监测中心
结合数字孪生技术,实现点击模型不同位置上设备或传感器显示对应信息和数据;实现对模型放大或旋转等可视化交互操作。
1.6"监控中心
用于连接工作站所有的摄像机,实时监控现场;远程对摄像头进行监控角度摆动的基本操控。
1.7"诊断中心
结合评估算法对工作站焊接机器人整体工作性能进行评估;列表焊接机器人工作站(机器人本体、变位机、周围安全设备、焊接电源)可能存在故障,建立故障树,计算故障概率;阈值监测工作站工作参数,并实现超出报警。
1.8"运维中心
实现基本的工单管理:运维派单、接收处理、验收,及时进行设备维修和巡检管理;由负责新建并提交任务申请,登记任务人员,分配任务完成情况等。
1.9"系统中心
查看系统操作日志;数据字典,修改数据库属性,全局配置,提高工程可维护性、可扩展性以及可配置性。
2"系统数据的确定与传输
2.1"数据的选择与存储
创建数据库,MySQL有较小的体积,能够实现快速地存储和查询,满足系统远程监测实时性的要求,故选择其作为数据的存储平台。明确和完善焊接机器人工作站基础数据,以及与各功能模块相关的数据等。
2.1.1焊接机器人工作站的基础数据
(1)工业机器人参数,主要包括型号、重量、自由度、负载、工作空间(臂展)、最大速度、使用的焊接方法和切割方法(弧焊或点焊)等;(2)焊接设备参数,主要包括焊接电源、焊接枪、焊接钳等设备的产品型号、电源电压、输入功率、工作电压、电流调节范围、主要用途等;(3)工作站结构参数及参数性能,主要包括工作站规格(长宽高)、总功率、最大工作范围、焊接平均效率等;(4)工件参数,主要包括待焊工件的型号、尺寸、形状、材质、壁厚、焊接接头类型等;(5)环境参数,主要包括工作温度、湿度、风速、振动等。
2.1.2焊接机器人工作站的动态数据
(1)焊接工艺参数,主要包括焊接电流、焊接电压、焊接速度、送丝速度、焊丝直径、焊丝干伸长度、气体流量;(2)位姿准确度、位姿重复性、轨迹准确度、轨迹重复性、摆动偏差、焊接良品率;(3)日工作焊接时间、日产能等。
在数据库中建立存储表格,定义相应数据字段,以运行数据为例,数据表格信息表1所示。
2.2"通信的建立与数据传输
将机器人工作站作为服务端,远程运维系统作为客户端。系统使用Socket实现双方的通信,Socket是对TCP/IP协议的封装,TCP(传输控制协议)为用户提供面向连接、可靠的字节流服务,它在数据传输时确认机制和重传机制保证了数据不丢失、不重复、按顺序到达。因此,能够保证传递工作站运行数据的正确性和完整性,满足系统状态监测的要求。
在这个过程中,服务端先进入监控状态,获取工作站控制系统上位机的IP地址并设置端口号,系统平台向其发送WebSocket连接的请求后建立TCP通信,设置监听周期以保证数据的实时性,接收并封装工作站传递而来的数据,可根据需求绘制工作站运行数据动态折线图,数据接收完毕后,断开TCP连接,节省资源。
同时,将数据保存至数据库,通过Ajax与后台数据库进行交互,异步加载获取并展示工单信息、通告消息等,在不重新加载整个网页的情况下,刷新网页局部内容和动态加载实时数据,增强系统的实时性。数据交换采用application/json格式,使用动态表格对工作站各数据信息列表展示及管理并且能够导出数据文件,便于后续对历史数据的回顾与处理分析。
3"基于数字孪生的可视化监测
3.1"虚拟场景的搭建
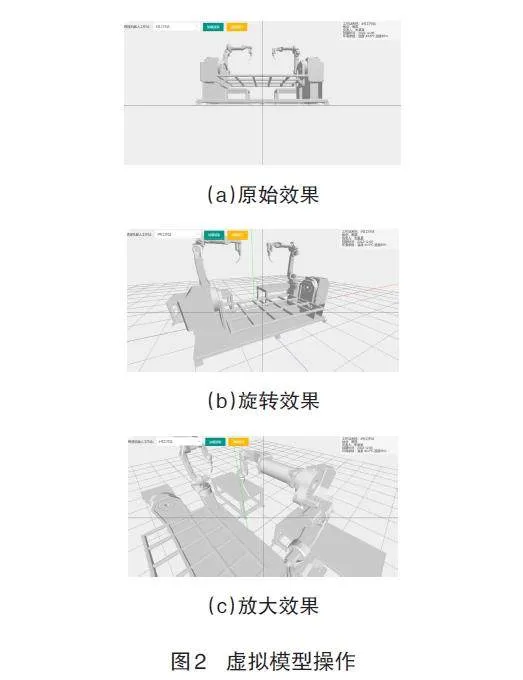
首先搭建焊接机器人工作站的3D虚拟场景。利用对WebGL封装和简化的第三方库Three.js,在网页上绘制和渲染复杂三维模型,把三维空间图像显示在二维的屏幕上,并且允许用户与之进行交互。可以借助较为成熟的可视化3D建模工具对工作站进行建模,WebGL提供多种加载器以支持不同文件格式的模型。本文将绘制好的模型转化为.obj格式并导入,以实现之后对界面上工作站各部件的拾取、识别。通过WebGL的obj加载器返回由一个或多个网格模型对象mesh组成的object3D对象,它具有children属性,实质上为一个数组,数组成员为这些mesh对象。焊接机器人工作站是一个复杂系统,mesh对象对应组成工作站装配体模型的各部件或传感器。工作站模型导入并在线加载完成后,可实现模型的旋转、缩放等操作,如图2所示。
此外在场景中,还需创建渲染器,规定模型展示的范围;选择相机和灯光,使模型显示在页面上,并确定查看的位置、方向和角度;添加坐标系、网格线或辅助线,便于调节照相模型、相机、灯光的位置和角度。
3.2"数据孪生及其映射
焊接机器人工作站上各部件相应数据的实时显示,是实现数字孪生虚拟系统与现实物理系统映射的关键。系统使用Three.js提供的功能接口,通过鼠标点击模型,拾取模型上相应的部件。实现该交互操作,需要先将显示屏幕坐标系转换为场景三维坐标系。屏幕上的点击点是以屏幕坐标系左上角顶点为坐标原点的相对横坐标和相对纵坐标,为A点在三维坐标系中的坐标值,转换关系表达式为
式(1)、式(2)中,和分别为三维模型显示区的绝对宽度和绝对高度,由于三维坐标系的范围是[-1,1],故需要根据式(3)和式(4)将点进行坐标标准化,以得到最终的显示点B(x2,y2)。
利用Raycaster(")函数以相机视点为起点创建光线射线,射线穿过鼠标在屏幕上的点击点,从深度为0的模型显示区最前方延伸到深度为1的模型显示区最后方,射线在这段中间区域依次穿过焊接机器人工作站模型上多个部件即mesh对象,顺序存放在数组intersectObjects中,数组序列中intersectObjects[0]就是我们点击屏幕所要选中的工作站部件。在准确地拾取到所需工作站部件后,查询数据库中相应数据表格中存储的实时运行数据或信息,进行显示。
4"系统实现与测试
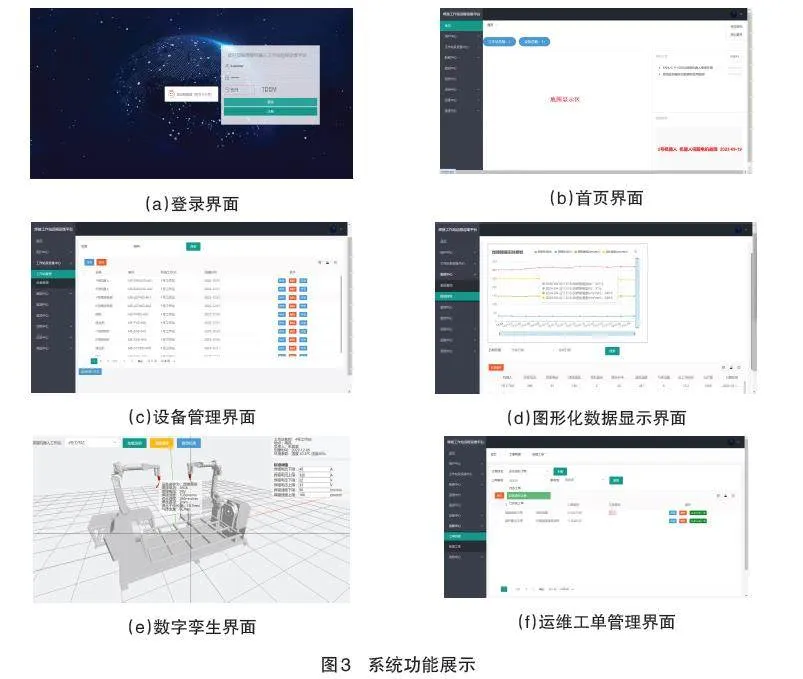
本系统开发环境使用面向Web应用开发的IDEA开发工具,主体采用SSM框架和LayUI经典模块化前端框架进行搭建,结合利用第三方库Echarts.js、Three.js等进行编程实现功能。在本地服务器端部署远程运维系统,在焊接机器人工作站正常运行状态下,对系统进行操作测试。登录界面上(如图3(a)所示),已注册用户通过账号和密码验证登录;进入系统首页后(如图3(b)所示),用户可对所属工作站进行管理和监测;在设备管理界面上(如图3(c)所示),实现对工作站、设备、工单、日志、历史数据等列表显示和增删改查的基础操作;数据显示界面上,与现场工作站上位控制端请求建立通信后实时接收运行数据,存储进数据库,选择数据绘制折线图动态展示(如图3(d)所示);数字孪生界面上选择工作站,点击拾取需要监测部件,对部件关联的设备信息、状态参数、实时工作数据等刷新显示、可视化,掌握工作站的运行状态(如图3(e)所示);运维工单管理界面上,可以进行派单、跟单和工单查询等操作(如图3(f)所示)。测试结果表明系统功能完备,符合预期设计要求。
5"结语
本文设计开发了一种面向焊接机器人工作站的可视化远程运维系统。该系统基于Web应用开发技术和B/S结构,采用分层技术架构和模块化功能架构,系统结合数字孪生技术,创建与物理场景相映射的虚拟场景,与现场控制上位机建立通信,传输实时运行数据及信息,实现数据孪生,在线可视化监测工作站运行状态。通过操作测试,本系统具有良好的实时性、数字交互性以及可配置性,为焊接机器人工作站远程运维系统的工程应用研究提供有益参考。
参考文献
[1]"李文鹏,康绍鹏,曹伟长,等.超长复杂的光伏支撑架焊接工作站系统设计[J].制造业自动化,2024,46(9):204-"208.
[2]""SABRY"A"H,"NORDIN"F"H,"SABRY"A"H,"et"al."Fault"detection"and"diagnosis"of"industrial"robot"based"on"power"consumption"modeling[J]."IEEE"Transactions"on"Industrial"Electronics,"2019,"67(9):"7929-7940.
[3]"许向南,闫利文,谢煜坚.基于移动终端的工业机器人远程监测与故障诊断系统设计[J].机床与液压,2021,"49(23):73-76.
[4]"杜莹莹,罗映,彭义兵,等.基于数字孪生的工业机器人三维可视化监控[J].计算机集成制造系统,2023,29(6):"2130-2138.
[5]"MOURTZIS"D,"ANGELOPOULOS"J,"PANOPOULOS"N."Intelligent"predictive"maintenance"and"remote"monitoring"framework"for"industrial"equipment"based"on"mixed"reality[J]."Frontiers"in"Mechanical"Engineering,"2020,"6:"578379.
[6]"许勇,文占婷,付猛林,等.基于云边协同技术的远程安全运维系统[J].信息安全与通信保密,2024(4):"93-104.
