配电网线路无人机智能巡检技术研究
2024-02-03贾秉健刘博文张润贤陈志莹
贾秉健,刘博文,张润贤,陈志莹
(新疆信息产业有限责任公司 新疆 乌鲁木齐 830001)
0 引言
配电网电路巡检是电力输送过程中极为重要的环节,它对于保障电力系统的安全稳定运行和用户用电质量具有至关重要的作用。 通过定期巡视、检测和维护配电网电路,能够及时发现和修复线路设备的故障,确保电网安全稳定运行[1]。 配电网电路的巡检工作非常重要,传统的巡检方法目前则面临一些挑战。 为了克服这些挑战并提升巡检效率,无人机智能巡检技术应运而生。 利用无人机进行配电网电路巡检,有着多重优势[2]。 首先,无人机可以快速覆盖大范围的巡检区域,减少人力资源的需求,从而提高巡检的效率和效果。 其次,无人机配备了先进的传感器和摄像设备,能够进行高清晰度的拍摄和监测,以便快速发现电路漏电、设备短路等安全隐患。 最后,无人机具备远程控制和实时监测的能力,可以实时传输巡检数据,加快故障的检测和处理时间,有效地提升电网的可靠性和响应能力。
1 配电网线路巡检介绍
1.1 巡检目标
配电网线路巡检的目标是确保供电质量、防范事故并提高设备的可靠性[3]。 具体来说,其目标包括以下三个方面:
(1)确保供电质量。 配电网线路巡检的首要目标是保障供电质量,确保电力供应的稳定性和可靠性。 通过巡检,可以及时发现和解决线路故障、松动接头、绝缘老化等问题,避免供电中断、电压波动和电能损耗,提高用户用电的质量和可靠性[4⁃5]。
(2)防范事故。 对配电网线路进行定期巡检,可以发现潜在的安全隐患和故障风险。 及时处理线路问题,减少电气火灾、短路、漏电和触电等事故的发生,保障人身安全和财产安全[6]。
(3)提高设备可靠性。 配电网线路巡检可以及时发现设备损坏、老化和磨损等问题,及时采取维修、更换或加固的措施,提高设备的可靠性和寿命。 通过巡检,可以对线路的接地、绝缘、连接件等进行检查,及时处理问题,避免故障的蔓延和恶化[7]。
1.2 无人机巡检技术介绍
无人机巡检技术原理是指利用无人机飞行平台和相关设备,结合航线规划、传感器技术和数据处理等技术手段,实施高效、全面的线路巡检。 其主要原理包括无人机飞行平台、传感器使用和数据处理等方面的技术[8-10]。
(1)无人机飞行平台:选择适当的无人机类型,如多旋翼或固定翼。 无人机应具备稳定的飞行能力、负载能力和飞行时间。 无人机配备先进的飞行控制系统,包括自主导航系统、飞行控制单元等,通过遥测和遥控技术,地面操作人员可以实时监控无人机的状态、姿态和飞行参数,并对其进行远程操控和指令传输。
(2)相机/传感器:搭载高清相机、红外热像仪或其他传感器设备,相机可以进行高分辨率的航拍,红外热像仪可检测线路温度异常。
(3)航线规划:通过地面站或预设航线规划软件,确定无人机的巡检航线和飞行轨迹,设置航点和拍摄区域参数。
(4)数字图像处理与分析:对航拍数据进行图像处理和分析,通过模式识别、机器学习等技术,检测线路故障和异常情况。 通过对航拍数据的图像处理和分析,提取关键信息,如线路杆塔状态、导线弧垂、杂草生长、松动接头、腐蚀损伤等,实现线路故障和异常的自动识别。
2 智能无人机巡检系统
在城市和周围地区,由于存在建筑物和树木等复杂环境,配网线路和设施的巡视和维护工作变得困难。 为了解决上述问题,研究人员采用高精度智能自动追踪导航系统作为无人机的辅助工具,实现了无人机的自动化和半自动化巡视,极大地提高了配网无人机的应用价值,减少了人力投入,提高了工作效率和安全性。
2.1 总体架构设计
本文采用GPS、机载相机和毫米波雷达等传感器,并结合惯性导航定位和模式识别技术。 据导线GPS 定位飞行至上方,通过机载相机和毫米波雷达进行测距和识别,确定无人机的高度和水平位置,然后飞行至距离导线2~5 m 的高度,沿着杆塔的GPS 信息开始巡检,如图1 所示。

图1 巡检示例
2.2 无人机导航定位研究
姿态融合解算是无人机导航定位算法的核心。 通过计算出无人机相对于北方向的夹角和相对于水平反向的夹角,再结合地理系加速度积分获取无人机的速度和其GPS 信息。 假设姿态四元数为Q,机体系加速度为a b,而a b在无振动和运动加速度情况下可以被视为机体系下测量得到的重力向量a b。 在这种情况下,机体系的姿态角误差e b可以由a b与Q*g nQ的夹角来表示,其中g n为地理系下的重力向量。 为了修正姿态误差,可以将k·e b叠加到机体系角速度上进行积分。 其中k为修正系数,其数值越大表示修正越快。 如式(1),其中n b、m b分别为机体系下的传感器以及震动造成的噪声、机体系下的运动加速度。 为了滤除噪声及运动加速度的影响,通常做法是对a b进行低通滤波。 通过将姿态误差乘以修正系数并加到角速度上,可以实现对姿态角误差的修正。 通过校正机体系角速度,从而使姿态估计结果更准确。 修正后的角速度将用于姿态积分,以获得更精确的飞行器姿态信息。
位置融合解算的目的是通过将惯性测量单元(inertial measurement unit,IMU) 的数据与其他位置传感器(如GPS、气压计、毫米波雷达等)的数据进行融合,以获取高精度的位置和速度信息。 本文设计一种多传感器融合算法来获取位置信息,并使用包络检波器来检测传感器的误差。 在此算法中,误差e i被定义为传感器位置数据p i与地理系加速度积分得到的位置数据p之间的差异,即式(2)。 为了实时计算各个传感器的噪声值,使用包络检波器对误差e i进行检波。 包络检波器可以提取信号的振幅变化,从而得到传感器误差的噪声值。 将传感器数据输入到包络检波器中,然后通过观察包络检波器的输出来估计传感器的噪声水平。 对于测距型传感器如毫米波雷达,阈值应设置较小,如15 cm 以内为正常;对于噪声较大的相对高度传感器如气压计,阈值应设置较大;最终,根据噪声大小和传感器的信任度进行加权计算,选择使用最优的传感器。
2.3 线路巡检算法研究
对于线路的巡检,一般有俯视巡检和侧视巡检两种方式。 考虑到侧视巡检过程中,配电网电路的弯曲程度比较大,会导致最终巡检的结果产生较大的误差,本文采用俯视巡检技术对配电网电路进行巡检。 图2 给出了巡检的整体流程,其中Hough 直线检测是用于特征检测和特征筛选。

图2 线路巡检流程图
为了能够将配电网线路的位置更具体地展示在图像上,本文首先对无人机获取的图像进行直方图均衡化,通过将直方图拉伸到整个灰度范围内,来增强巡检图像的对比度,直方图均衡化的前后对比如图3 和图4 所示。 其次对图像进行Canny 边缘检测和形态学滤波,使用闭运算操作填充边缘中的空洞,进一步提高边缘的连续性和完整性,以得到更具有实用价值的边缘图像,适用于各种图像分析和处理应用。 处理之后的结果如图5 和图6 所示。

图3 原始灰度图

图4 直方图均衡化结果图

图5 Canny 边缘检测结果图
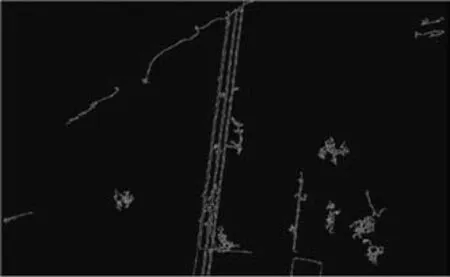
图6 形态滤波结果图
最后,使用Hough 变换进行特征提取,将图像中的像素点转换为参数空间中的曲线或点,并通过对参数空间进行分析来检测图像中的直线。 同时,为了进一步增加识别的精度,在算法中加入特征筛选,通过迭代对比所获取的直线的斜率和长度来进一步识别配电网线路,最终所获得的结果如图7 所示。

图7 最终配电路筛选结果
3 实验分析
3.1 导航定位测试
在无人机线路巡检过程中,结合无人机反馈的GPS定位信息,使用姿态融合解算预测出无人机的位置。 融合解算的位置数据相较于GPS 原始数据可以提前约0.2 s,并且补偿了GPS 传感器的延时时间。 融合解算利用了惯性数据进行位置预测,因此可以实现更高的频率,从而解决了GPS 定位延时长和采样率低的问题。 通过结合多种传感器的数据,融合解算技术可以提供更准确、更实时的位置信息。
3.2 巡检效果测试
本文提出的配电网无人机智能巡检方法,无人机在根据线路定位信息巡检过程中,不仅能够实时修正无人机飞行位置,始终保持无人机处于线路正上方,确保无人机视野开阔,而且能够准确识别输电导线位置,如图8 所示。

图8 巡检导线识别测试
4 结语
本文提出了一种配电网线路无人机智能巡检的方法,研究核心是姿态和位置融合解算,它通过将不同传感器的数据进行融合,取长补短,从而提供更准确、稳定的飞行器姿态和位置信息。 首先,为了更精确地进行定位,本文设计了图像识别算法,用于识别导线目标。 通过图像修正GPS 航线,确保飞行器始终位于导线正上方进行飞行。 通过实际巡检飞行测试,本文算法的可靠性和稳定性得到了验证。 其次本文算法的应用为巡检无人机的飞行提供了更可靠的定位解决方案,提高了巡检任务的执行效率和准确性。 最后,通过使用图像识别技术,还可以进一步提升飞行器对导线目标的感知能力,提高巡检的安全性和可控性。
