基于N-K模型和尖点突变的公交车交通事故风险分析
2024-01-31潘福全董炳洁董云鹏张丽霞杨金顺陈秀锋
潘福全,董炳洁,董云鹏,张丽霞,杨金顺,陈秀锋
(1.青岛理工大学 a.土木工程学院;b.机械与汽车工程学院,青岛 266525;2.青岛海纳云智能系统有限公司,青岛 266101)
公交车出行一般被认为是相对安全的出行方式,但近年来,全国公交车交通事故频发,公交车交通安全问题引起人们的重视。因此,分析公交车交通事故发生风险,加强日常运营安全管理,降低公交车事故率显得尤为重要。
NABILA等[1]通过试验获取长短途公交车驾驶员在驾驶和休息期间的血压、心率、身体质量等生理指标,结果表明延长公交车驾驶员休息时间和增加身体活动能够降低公交车交通事故的发生。CHIEN[2]利用logistic回归模型研究公交车驾驶员发生交通事故的影响因素,发现驾驶人驾驶经验对交通事故的发生有显著影响。SERGIO等[3]研究了工作压力与公交车驾驶员工作表现关系,结果显示工作压力大会显著影响公交车驾驶员驾驶的安全性。王丰元等[4]利用试验采集了公交车驾驶员在通过直线式和港湾式车站时的生理数据,发现驾驶员在不同停靠站的生理特性有明显差异。任慧君等[5]利用车载GPS模块从轨迹数据中提取超速、急加速等不安全驾驶行为来评估驾驶行为的安全性,结果显示设置恰当的行驶速度、加速度等值,可以有效评价驾驶员的驾驶行为和安全意识。徐慧智等[6]利用相关分析法,探究了城市道路禁令交通标志对公交车驾驶员安全驾驶的影响,结果显示城市路侧禁令交通标志的数量会对驾驶员的安全驾驶有显著影响。朱彤等[7]利用随机参数模型分析相关因素对公交车驾驶人发生事故的影响,发现驾驶人的历史违规行为会显著影响发生交通事故的概率。张缔等[8]通过案例分析法,构建了公交车火灾事故风险致因评价体系,发现乘客行为、电气设备故障和机械故障是导致公交车火灾事故的主要原因。
综上所述,现有研究大多是分析公交车驾驶员生理、心理指标对公交车交通事故的影响,往往只局限于人的因素,没有从系统的角度考虑风险形成机理及演变过程,忽略了人、路、车、环境和管理等因素相互作用、耦合下对公交车行车安全的影响。本文针对影响公交车交通事故的人、路、车、环境和管理因素,构建了公交车交通事故风险耦合层次网络模型。基于N-K模型,建立公交车交通事故风险耦合度量模型,量化分析公交车交通事故风险因素耦合关系,找出导致公交车交通事故的关键风险因素和强耦合关系,最后通过建立公交车交通事故尖点突变模型,进一步分析公交车交通安全系统风险状态演变,为预防公交车交通事故的发生和安全管理提供依据。
1 公交车交通事故风险因素识别
通过对公交车交通事故数据整理分析,从安全系统工程的角度,将公交车交通事故风险因素分为人的因素、道路因素、车辆因素、环境因素和管理因素5类。
1) 人的因素:分为公交车驾驶员和乘客两方面。公交车驾驶员存在超速、违规超车、违规变更车道、不按规定让行、抢道、进站不靠边等危险驾驶行为;驾驶员对行人、路线和对向来车等判断错误,操作失误等驾驶技术问题;另外驾驶员还存在安全意识差、应急处理能力弱、驾驶经验不足、疲劳驾驶、精神异常等身体和心理问题。乘客原因主要包括不遵守乘车规定、破坏车内安全设备、与驾驶员发生冲突、不按秩序上下车等影响驾驶安全的行为。
2) 道路因素:包括道路弯道过大和坡度过陡,视距差,道路线形及线形组合设计不合理,交通标志、标线不完善,照明设备差,公交车站设置不合理等道路安全配套设施不完善问题;道路施工、道路交通出行量大、行人横穿马路、非机动车违法行车等导致的道路环境复杂问题;广告牌和绿化带遮挡等道路景观遮挡视线问题。
3) 车辆因素:公交车性能的稳定性直接影响公交车的行车安全。公交车负载高、制动频繁易使公交车制动和转向等零部件失效和老化;燃料系统和电气系统故障等易造成车辆失火;车载逃生设备和安全设施不健全、公交车视野盲区及内轮差等问题都影响行车安全。
4) 环境因素:包括内部环境因素和外部环境因素。内部环境因素主要是车内噪声大、高温、氧气含量低等导致驾驶员身体疲劳、心理急躁造成注意力不集中、反应迟钝。外部环境因素主要是恶劣天气(包括大雾、雨雪天气等)造成的道路湿滑和视线状况差等问题。
5) 管理因素:主要是政府制定的相关法律和规章制度不完善,对企业运营监管不到位;公交车运营企业日常安全管理存在漏洞,对驾驶员的资质审查、安全培训等不到位;公交车运营企业对公交车辆的限速、隐患排查、维修保养等不到位;公交车运营企业对乘客乘车秩序规范、事故逃生培训等缺乏;公交运行线路设置不合理、公交调度运营不合理、突发事故应急预案不完善等运营问题。
2 公交车交通事故风险耦合类型及演化
2.1 公交车交通事故风险耦合类型
耦合是物理学概念,指两个或两个以上的体系或运动形式相互作用而彼此影响以致联合起来的现象,风险耦合指的是系统中各个风险之间相互依赖和相互影响的程度[9-10]。将公交车交通运输系统人、路、车、环境和管理下的风险耦合方式分为单因素、双因素和多因素风险耦合(图1)。
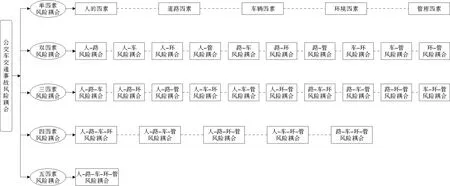
图1 公交车交通事故风险耦合类型
2.1.1 单因素风险耦合
单因素风险耦合是指由公交车交通事故5类风险因素中的同一级风险因素内部因子之间相互耦合而引起的风险,包括人的因素风险耦合、道路因素风险耦合、车辆因素风险耦合、环境因素风险耦合、管理因素风险耦合5类。单因素风险耦合是比较普遍的耦合形式,很难导致公交车交通事故的发生。
2.1.2 双因素风险耦合
双因素风险耦合是指影响公交车交通事故风险因素中任意不同级的2个因素彼此作用、相耦合而导致的风险。公交车交通事故双因素风险耦合包括人-道路、人-车、人-环境、人-管理、道路-车、道路-环境、道路-管理、车-环境、车-管理、环境-管理共10个。例如2019年9月发生的九江市公共交通集团公司“9·28”交通事故[11],直接原因是驾驶员在倒车时未观察车后情况撞到行人造成的,间接原因是由于企业日常监管漏洞和安全培训不到位造成的,属于典型的人-管理双因素风险耦合造成的公交车交通事故。
2.1.3 多因素风险耦合
公交车交通事故多因素风险耦合包括三因素、四因素和五因素风险耦合。三因素风险耦合是指公交车交通事故风险因素中任意3个风险因素之间彼此作用、相耦合而产生的风险。公交车交通事故三因素风险耦合分为人-道路-车、人-道路-环境、人-道路-管理、人-车-环境、人-车-管理、人-环境-管理、道路-车-环境、道路-车-管理、道路-环境-管理和车-环境-管理10个。四因素风险耦合指影响公交车交通事故风险因素中的任意4个风险因素之间彼此作用、相耦合而导致的交通事故风险。公交车交通事故四因素风险耦合分为人-道路-车-环境、人-道路-车-管理、人-道路-环境-管理、人-车-环境-管理和道路-车-环境-管理5个。公交车五因素风险耦合指公交车交通事故风险因素中的5个因素互相耦合而导致的风险,只有人-路-车-环境-管理1个。例如,沅陵县城市公共汽车有限公司“11·23”交通事故[12],直接原因是道路对向来车灯光影响驾驶员视线导致的刹车不及时,间接原因有车辆前轮磨损异常及公交公司安全培训、隐患排查不到位,属于典型的人-道路-车-管理四因素风险耦合造成的交通事故。
2.2 公交车交通事故风险耦合层次网络模型
从复杂系统网络风险涌现的角度来看,公交车交通事故系统是一个具有非线性和立体层级结构的事故网络组织,当事故系统中的网络节点触发风险涌现,风险状态就会随之变化,而公交车交通事故的发生需要经历风险涌现、风险传递、风险耦合、事故涌现等诸多过程[13-14]。
由人、路、车、环境和管理等风险因素经过复杂线性耦合、相互作用,形成公交车交通事故链,事故链沿着复杂关联关系传递,多条事故链构成了公交车交通事故的子系统层。当事故链在时空上经过一系列非线性复杂耦合后,形成了公交车交通事故风险演化耦合网络,事故链时空演化的结果以风险状态表现出来,而风险因素具有动态特性,风险因素的动态变化会沿着风险传播路径导致上一层结构或状态发生同步演变,当事故系统的风险状态在某时刻跃变突破系统阈值后,就会导致公交车交通事故的发生。建立公交车交通事故风险耦合层次网络模型如图2所示。
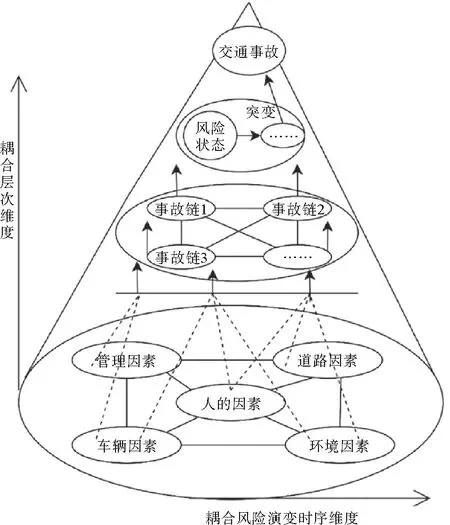
图2 公交车交通事故风险耦合层次网络模型
3 公交车交通事故风险耦合度量模型
根据复杂系统理论,公交车交通事故的演变过程是复杂系统动态风险耦合的过程,而N-K模型由 KAUFFMAN 提出后,在研究动态系统相互作用方面具有很高的实用性。目前,在海上交通、轨道交通、危化品运输、油气储备等领域的风险评估中被广泛应用,但是在公交车交通事故系统风险耦合的研究中应用甚少[15-17]。通过N-K模型,建立公交车交通事故风险耦合度量模型,计算公交车交通事故中人、路、车、环境、管理5类风险因素的风险耦合值T,来量化不同风险因素之间的耦合关系。当一种耦合方式出现的占比越高,其风险耦合值T就越大,越容易导致公交车交通事故的发生[18]。N-K模型中的参数N代表系统内组元数量,K代表系统中组元之间相互影响、相互耦合关系的个数,其取值区间为[0,N-1]。在模型中用1和0来表示风险因素是否会发生,1表示发生,0表示不发生[19]。
3.1 双因素耦合度量模型的构建
公交车交通事故双因素风险耦合(图1)T值分别为T21(a,b),T22(a,c),T23(a,d),T24(a,e),T25(b,c),T26(b,d),T27(b,e),T28(c,d),T29(c,e),T210(d,e)。基于N-K模型,建立公交车交通事故双因素风险耦合度量模型T2,以人-道路双因素风险耦合为例,见式(1),其他双因素风险耦合度量模型类比式(1)。
(1)
3.2 多风险因素耦合度模型的构建
公交车交通事故三因素风险耦合(图1)T值分别为T31(a,b,c),T32(a,b,d),T33(a,b,e),T34(a,c,d),T35(a,c,e),T36(a,d,e),T37(b,c,d),T38(b,c,e),T39(b,d,e),T310(c,d,e)。基于N-K模型,建立公交车交通事故三风险因素耦合度量模型T3,以人-道路-车三因素风险耦合为例,见式(2),其他三因素风险耦合度量模型类比式(2)。
(2)
公交车交通事故四因素风险耦合(图1)T值分别为T41(a,b,c,d),T42(a,b,c,e),T43(a,b,d,e),T44(a,c,d,e),T45(b,c,d,e)。基于N-K模型,建立公交车交通事故四因素风险耦合度量模型T4,以人-道路-车-环境合风险为例,见式(3),其他四因素风险耦合耦合度量模型类比式(3)可得。
(3)
基于N-K模型,建立公交车交通事故五风险因素耦合度模型T5:
(4)
式中:a,b,c,d,e分别表示人、道路、车辆、环境、管理5类风险因素;h,i,j,k,s分别为5类因素所处的状态,h=1,…,H;i=1,…,I;j=1,…,J;k=1,…,K;s=1,…,S;phijks为人、道路、车辆、环境、管理处于h,i,j,k,s状态下发生风险耦合的概率;ph····,p·i···,p··j··,p···k·,p····s分别为人、道路、车辆、环境、管理在h,i,j,k,s状态下单因素耦合发生的概率。
3.3 实例分析与计算
收集2005年以来国内官方网站上有具体事故报告的664起公交车交通事故案例,由不同风险因素导致的事故的数量及比例见表1。
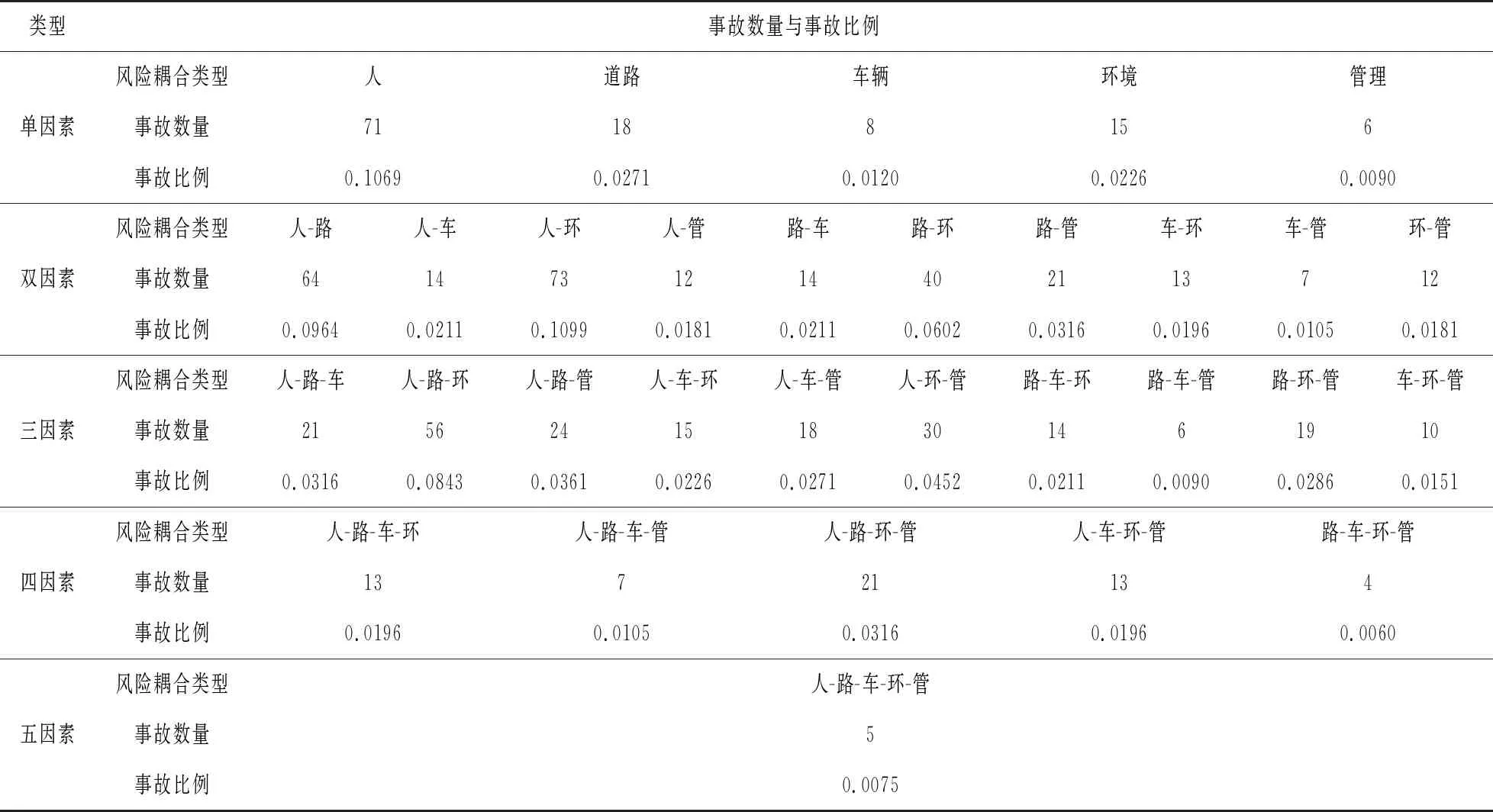
表1 664起公交车交通事故类型统计
在计算风险耦合度值T时,需要先计算单因素、双因素和多因素风险耦合不同情况下导致事故发生的概率,将求出的不同风险耦合发生概率代入式(1)-式(4),可以求出不同风险耦合下的T值,结果见表2。
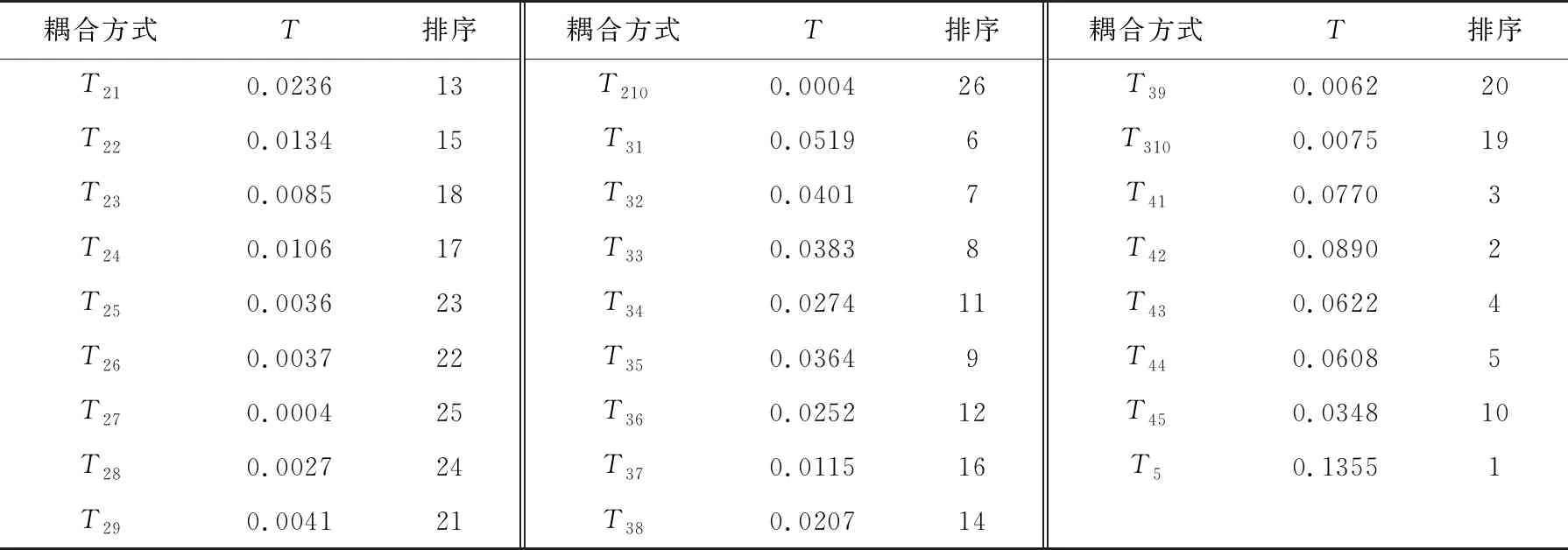
表2 不同风险耦合下的T值
从表2可以看出,五因素风险耦合值最大,四因素风险耦合值总体上大于三因素风险耦合值,三因素风险耦合值总体上大于双因素风险耦合值。整体上,风险耦合值T的大小同参加风险耦合的因素数量成正比,参与耦合的风险因素数量越多,风险耦合值T越大,公交车交通事故发生的概率就越大。其中,四因素风险耦合中,人-道路-车-管理T42的风险耦合值最大,其次是人-道路-车-环境T41,最小的是道路-车-环境-管理T45。三因素风险耦合中,人-道路-车风险耦合值最大T31、其次是人-道路-环境T32,最小的是道路-环境-管理T39。在双因素风险耦合中,人-道路风险耦合值最大T21、其次是人-车T22,最小的是道路-管理T27和环境-管理T210。
在双因素和多因素风险耦合值最大的组合中,均有人的因素和道路因素参与,说明人的因素和道路因素具有较强的耦合性,与不同风险因素耦合时的风险耦合值最大,人的因素和道路因素是决定公交车交通安全的关键因素。
4 公交车交通事故尖点突变模型
4.1 公交车交通安全系统风险状态分析
突变理论由法国数学家Thom于20世纪60年代提出,它以稳定性理论、奇点理论为理论基础,分析系统风险状态演变中的突变现象。通过建立公交车交通事故双因素和多因素风险耦合度量模型,发现人的因素和道路因素是决定公交车交通安全的2个关键因素。而人的因素作为直接因素,对事故发生起决定性作用,道路因素对公交车交通事故起间接作用。在公交车交通事故风险因素分类的基础上,将人的因素和管理因素等人为因素作为主要因子u,道路因素、车辆因素和环境因素等物的因素作为次要因子v,构建公交车交通事故尖点突变模型势函数R(x):
R(x)=x4+aux2+bvx
(5)
通过对式(5)求导,得到临界三维曲面方程:
R′(x)=4x3+2aux+bv=0
(6)
通过二阶求导,得到奇点集方程,即:
R″(x)=12x2+2au=0
(7)
通过联立式(5)和式(6),得到分叉点集方程,即:
Δ=8au3+27b2v2
(8)
式中:x为公交车交通安全系统状态水平量;u为人为因素风险耦合度;v为物的因素风险耦合度;a和b为控制变量参数。
结合式(5)-式(8)构建公交车交通事故尖点突变模型示意图,如图3所示。
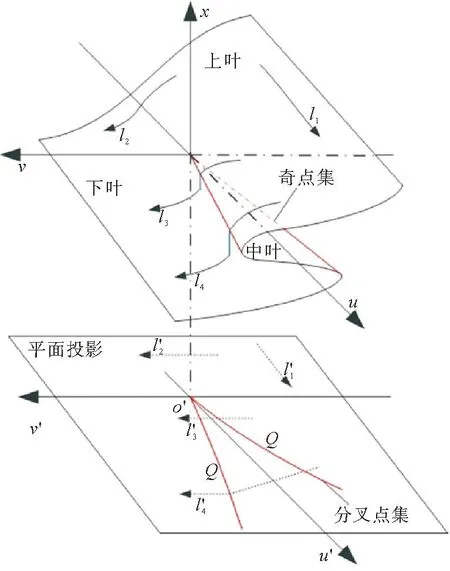
图3 公交车交通事故尖点突变模型
图3中公交车交通事故风险尖点突变模型三维平衡曲面为三维回折曲面,将其分为上叶安全区域、中叶突跳区域和下叶事故区域。奇点集作为公交车交通事故突跳点集,其在平面的投影集为交叉点集。公交车交通安全系统开始处于三维平面上叶的安全区域,在公交车交通安全不同风险因素耦合作用下,安全系统向风险状态逐渐演化,在突破风险阈值后,经三维平衡曲面的中叶突跳区域落到奇点集,发生突跳直接跃至下叶的事故区域而发生交通事故。
对于曲线l1,当只有人的因素和管理因素等人为因素风险耦合增强,而道路因素和车辆因素等物的因素风险耦合较低时,公交车交通事故风险逐渐增强,在其平面投影中,l′1不与分叉点集相交,此时公交车交通安全系统保持稳定状态,不会发生突变。同理,对于曲线l2来说,当只有道路因素和车辆因素等物的因素风险耦合增强,而人为因素风险耦合较低时,公交车交通事故风险会逐渐增强,系统状态由上叶安全状态演变成下叶事故状态,但在其平面投影中,l′2不与分叉点集相交,此时不会发生公交车交通事故,但系统进入风险状态,且变得不稳定。对于曲线l3,当人为因素风险耦合处于高水平状态,随着物的因素风险耦合增强,其平面投影线l′3与分叉点集发生少量交集,公交车交通安全系统状态发生轻细微突变,从与中叶奇点相交位置突变跃至下叶事故区域,此时,系统进入危险状态,会发生轻微公交车交通事故。而对于曲线l4来说,当人为因素和物的因素风险耦合同时增强,导致其平面投影l′4与分叉点集发生大量交集,公交车交通安全系统状态发生大幅突跳,此时系统进入异常危险状态,容易引发恶性交通事故。
4.2 公交车交通事故仿真模型
为了更好地分析公交车交通事故风险状态,基于构建的公交车交通事故风险耦合度量模型,计算不同风险因素耦合度,将计算结果代入公交车交通事故尖点突变仿真模型中,得到仿真模型和平面投影图(图4)。由于影响公交车交通安全的主要风险因素是动态变化的,不同风险因素造成的公交车交通事故比例不同,通过建立公交车交通事故尖点突变仿真模型,可以动态显示出公交车交通安全系统状态水平量x在平面投影的位置,由此可以判断公交车交通安全系统的风险状态,识别风险源,预防交通事故的发生。
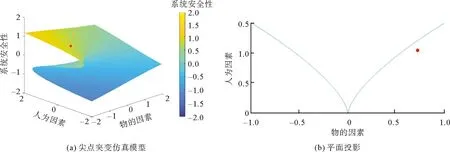
图4 公交车交通事故尖点突变仿真模型及平面投影
5 结论
1) 通过对公交车交通事故的风险因素识别,得到了不同风险因素的耦合形式。从复杂系统涌现的角度,构建了公交车交通安全风险耦合层次网络模型,发现公交车交通安全系统是一个具有非线性和立体层级结构的网络组织,公交车交通安全风险因素之间的线性耦合动态变化,会导致事故链时空非线性复杂耦合变化,进而使公交车交通安全系统风险状态发生演变。
2) 基于N-K模型,建立了公交车交通事故双因素和多因素风险耦合度量模型,得到了公交车交通安全不同风险因素耦合的概率以及风险耦合度值T。风险耦合度值T的大小与参与耦合的风险因素数量存在正比关系,多因素风险耦合值整体上大于双因素风险耦合值。参与耦合的风险数量越多,风险耦合度值T越大,公交车交通事故发生的概率就越大。
3) 公交车交通事故局部风险耦合作用效果显著,人的因素和道路因素有着较强的耦合性,构成了强耦合关系,更容易与其他风险因素耦合,且参与风险耦合时的风险值最大,是影响公交车交通安全的2个关键因素。
4) 通过建立公交车交通事故尖点突变仿真模型,可以动态显示公交车交通安全系统状态水平量的投影位置,判断整个公交车交通安全系统的风险状态,对公交车交通安全风险因素耦合及时干预,避免交通事故的发生。
5) 针对影响公交车交通安全的2个关键风险因素,要加强对人的因素和道路因素的预防措施,采取有效措施,减少人为因素和物的因素耦合作用,可以有效避免公交车交通安全系统状态发生大幅突跳,引发恶性公交车交通事故。
