转子叶片低介入叶端定时测量技术
2024-01-31曹佳辉陈雪峰杨志勃田绍华
曹佳辉,陈雪峰*,杨志勃,田绍华
(1.西安交通大学 航空动力系统与等离子体技术全国重点实验室,陕西 西安 710049;2.西安交通大学 机械工程学院,陕西 西安 710049)
转子叶片是直接影响航空发动机和燃气轮机功能性与完整性的重要部件,其恶劣的服役环境加之结构强度相对薄弱,极易发生损坏[1],因此对转子叶片进行在线监测以及时发现早期损伤,对保障航空发动机及燃气轮机安全运行具有重要的意义[2]。现有转子叶片的监测技术主要分为接触式和非接触式两类。接触式测量方法主要是在叶片表面粘贴应变片[3],然而应变片测量少数叶片的振动信息、信号传输困难,并且使用寿命短,难以推广应用。叶端定时是一种新兴的非接触式叶片振动测量技术,通过安装在静止机匣上的传感器来记录叶片的到达时间,进而计算叶尖的振动位移。得益于其非接触性和高效的特点,叶端定时有望实现转子叶片的振动测量和在线监测。
在叶端定时测量中,叶片每经过一次传感器,就实现了对该叶片叶尖振动的采样,因此叶端定时信号采样率与叶盘的旋转频率和传感器数量有关。叶盘的实际转速通常由额定工况决定,传感器数量受航空发动机及燃气轮机结构安全和安装空间的限制,叶端定时采样率通常远小于叶片的振动频率,导致采集到的叶端定时信号欠采样。为了从欠采样信号中辨识出叶片的振动参数,进而监测叶片的健康状况,国内外学者已提出了许多基于叶端定时测量参数的辨识方法。
2001年,Carrington等[4]将自回归模型应用于叶端定时信号,利用4支等距传感器实现了从同步振动数据中提取叶片振动频率、幅值和阻尼等振动参数。2003年,天津大学段发阶教授课题组[5]提出了“5+2”方法,利用7支传感器快速提取了叶片的振动频率。2006年,Joung等[6]利用周向傅里叶算法匹配叶端定时信号的频率,以监测叶片共振响应。2016年,Lin等[7]首次将压缩感知引入叶端定时信号处理,提出了基于频域稀疏性的叶端定时信号表示模型。2019年,吴淑明等[8]将增强稀疏分解应用于频谱重构,来改善频谱质量。同年,Bouchain等[9]基于叶端定时信号稀疏表示模型,提出了一种基于贪婪算法的信号重构方法,恢复了叶片振动频谱。贺长波等[10]采用基于总体最小二乘法准则的旋转不变子空间法对叶端定时信号进行频率估计,有效地抑制了噪声的干扰。王增坤等[11]改进了多重信号分析方法以适用于叶端定时分析,实现了振动频率辨识。2021年,Li等[12]提出了自适应迭代加权方法来减少最小二乘频谱重构过程中混叠成分的干扰。2023年,笔者[13]聚焦叶片振动的协方差信息,提出基于互质采样以及嵌套采样叶端定时方法来恢复信号的功率谱。
现有叶端定时测量方法大多依赖于多传感器布局,通常需要3~7支叶端定时传感器。然而,航空发动机和燃气轮机在实际中不允许安装过多的传感器。受增重、安全和安装等因素制约,使用单位希望尽量减少传感器安装以降低对发动机本体的改装。因此,亟需发展低介入测量技术,以提高叶端定时的实用性。
传统叶端定时信号方法解决的是欠采样信号参数辨识问题,而低介入测量使信号的欠采样程度进一步加深,致使压缩感知等先进的信号处理方法失效。压缩感知等均通过稀疏匹配的思路实现特征提取与恢复,在极端少传感测量的条件下由于信息极度缺失已不具备其实施条件,需要独辟蹊径开展研究。信号混叠的本质是由于测量不满足奈奎斯特-香农采样定理导致目标信号特征在频域空间周期性弥散,其主要特征仍存在于信号中,因此其本质在于“富集”而非目标明确的“提取”。《孙子算经》中:“今有物不知其数,三三数之剩二,五五数之剩三,七七数之剩二,问物几何?”此为余数定理。在少传感条件下信号频率的混叠过程与余数定理描述的核心一致,若不能“知物几何”,亦可通过不断富集其“余”所包含的信息,来重构目标解。近几十年来,中国余数定理在数字信号处理、编码、统计学、计算机等领域得到了广泛的应用[14-15]。欠采样信号的采样频率、真实频率、混叠频率可类比于同余方程组的模数、被除数、余数,因此余数定理十分适用于欠采样信号频率估计。Xia等[16-17]将余数定理推广,应用于欠采样高频(复)信号频率估计问题,此后该团队不断改良算法,提出了一系列鲁棒中国余数定理算法[18-20]。黄翔东等[21]利用过零点检测电路将余数定理估计方法从复信号推广到实信号。为富集混叠信息,须对不同的频率进行采样。在叶端定时测量中,不同的采样率可由不同密度均匀布局实现。Beauseroy、陈仲生等[22-23]提出了基于互质布局的叶端定时测量方法,可辨识叶片的振动频率;然而互质布局至少需要4或7支传感器,不符合叶端定时低介入、少传感要求。在叶端定时测量中,多速率采样可通过改变转速或改变分析数据之间的相对延时等效实现。基于这两点发现,分别提出了两种极端欠采样信号处理方法,为低介入叶端定时测量提供技术基础。
为实现低介入叶端定时测量,减少传感器安装的数量,提出了基于主动混叠的双传感测量方法和基于被动混叠的单传感测量方法,分别实现对匀速和变速工况下叶端定时叶尖振动参数辨识。在双传感方法中,利用相位和延时主动生成一系列混叠信息,最终通过对混叠信息解模糊来重构信号频率。在单传感方法中,从采样频率重新审视信号,提出采样-混叠频率分布,通过对该分布的特征直线进行分析得到叶片的振动阶次和固有频率。该方法遵循以“混叠利用”代替“混叠抑制”思想,为叶端定时信号分析提供了新思路。在此基础上总结了低介入叶端定时测量理论,指出少传感测量所须遵循的基本原则,为低介入传感测试与安装提供指导。
1 叶端定时测量原理
叶端定时测量通过安装在机匣上的光纤、电容[24]或电涡流等传感器来记录旋转叶片的实际达到时间,在此基础上反演叶尖位移。以光纤型传感器为例来介绍叶端定时测量过程。光纤式叶端定时传感器探头包含了发射端和接收端。光电模块以恒定的功率向发射端发射激光,接收端接收反射得到的激光。当叶片经过传感器时,接收端接收到的光强会发生显著变化,光强信号被转换成电压信号,并且被调制为标准的矩形脉冲信号。最后,矩形脉冲信号的上升沿或下降沿时刻被记录作为叶片的达到时间,如图1所示。
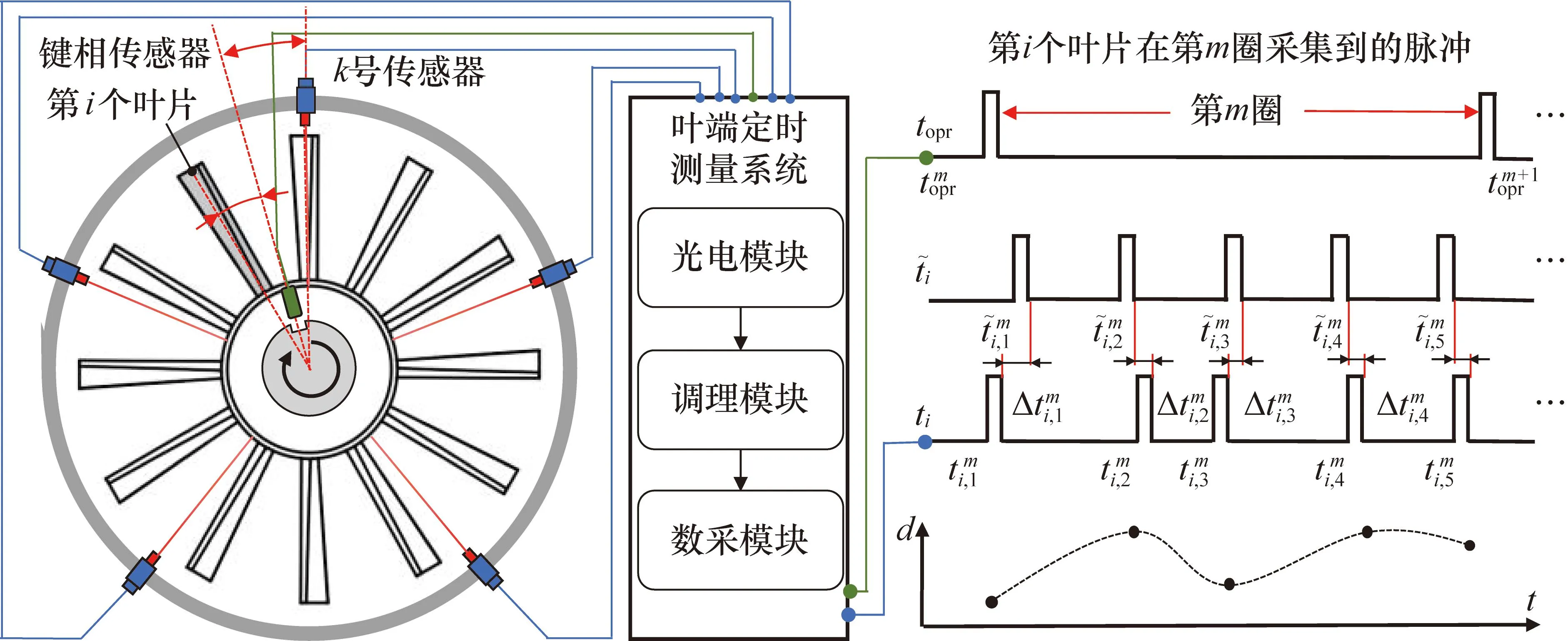
图1 叶端定时测量原理
在无振动的情况下,叶片期望达到的时间可通过旋转频率和相对角计算得到:
(1)

在旋转过程中,叶片不可避免地会发生振动。因此叶片实际的到达时间会早于或晚于期望的达到时间。叶尖位移可通过两者的时间差计算:
(2)

叶端定时测量是一种被动采样,不同于传统的振动测量方式,叶片定时采样频率并不是通过数据采集设备设定,而是由旋转频率和传感器布局决定。对于单支传感器或若干传感器均匀分布的情况,其采样率fs满足以下条件:
fs=np×fr
(3)
式中:np为传感器数量。
以在额定工况9 000 r/min下,使用叶端定时采集固有频率为1 000 Hz叶片的叶端振动为例,根据香农-奈奎斯特采样定理,至少需要14支传感器才能得到非欠采样的振动信号。然而航空发动机和燃气轮机中不允许安装过多的叶端定时传感器,因此叶端定时信号通常是欠采样的。须考虑如何在少传感、低介入的前提下,实现从叶端定时信号中辨识振动参数。
2 双传感低介入叶端定时方法
2.1 主动混叠延时估计
延时估计(Time Delay Estimation,TDE)[25]是一种利用有限采样延时内相位变换来估计叶片频率的方法。根据傅里叶变换的性质,时域内的延时等效于频域内的相位旋转,由此有
D2(f)=D1(f)ej2πτ
(4)
式中:D1(f)和D2(f)分别为d1和d2的傅里叶变换结果,d1和d2表示由第1和第2支传感器记录得到的某一叶片的叶尖位移向量;τ为叶片经过传感器1和2的时间差,即传感器2相对于传感器1采样时间的延时时间,其与夹角和转频的关系为
τ=θ/(2πfr)
(5)
式中:θ为传感器1和传感器2的夹角。
根据式(4),有
(6)
式中:fn为叶片的固有频率;(·)*表示共轭运算;angle[·]为取相位运算。

(7)
式中:φ为D1(fa)D2*(fa)的相位,|φ|∈[0,π],所以式(7)可识别的最大频率为1/(2τ)。为保证固有频率可被成功识别,固有频率须不超过1/(2τ),延时时间需要小于等于奈奎斯特间隔,即
τ≤1/(2fn)
(8)
根据延时和夹角的关系,式(8)可改写为θ≤πfr/fn。在叶端定时测量中,叶片的固有频率通常远大于转频。因此传统延时估计要求2支传感器的距离相近。然而夹角较小时安装困难,并且会放大安装角θ、转频fr和相位φ的误差,严重影响方法的实用性[26]。
使用小角度(小延迟)方案来直接计算固有频率并不实用,因此,笔者提出主动混叠延时估计。首先构造不同的大延时方案来主动生成一系列混叠信息,然后对混叠信息解混叠来估计目标频率。不同延时方案可通过改变2路采样数据的相对延迟来实现,不同的延时时间对应不同的延时角,如图2所示。

图2 生成不同延时方案的示意图
θd=2πp+qθ,p∈Z,q∈{0,±1}
(9)
式中:θd为延时角,每一个延时角θd都对应一个延时为τd的延时采样方案,τd=θd/(2πfr)。
每一对p和q的组合表示一种延时方案,比如p=1、q=-1的情况对应图2的第2个延时方案。相应的延迟τd为传感器1的第k个数据与传感器2的第k+1个数据的采样时间差。就获取混叠频率而言,延时估计可实现均匀采样的效果;相应地,为代替“采样频率”的概念,定义延时倒数为“等效采样频率”,即
(10)

在混叠频率的计算中,因为τd大于奈奎斯特间隔,由式(7)计算得到的结果并非固有频率,而是其混叠结果,存在如下关系:
(11)

式(11)与经典频率混叠公式十分相似,显著区别在于适用场景。经典频率混叠公式仅适用于均匀采样场景。在叶端定时测量中,文献[22]和文献[27]也采用经典频率混叠公式从均匀采样样本中恢复叶片的固有频率,需要传感器同时集成至少两种等间隔布局,且两种等间隔布局的传感器数量互质,满足这一要求的布局至少需要4或7支传感器。式(11)摆脱了均匀采样的限制,适用于周期性非均匀采样。在双传感布局情况下,通过考虑不同的延时时间/角度,可根据式(11)得到不同的混叠频率。所提出的主动混叠延时估计利用相位变换来计算不同延时下混叠的频率,即主动混叠延时估计利用相位和延时等效地实现了多速率采样的效果,极大地简化了叶端定时测量的硬件配置。
2.2 解混叠过程
2.2.1 鲁棒的封闭中国余数定理
中国余数定理(Chinese Remainder Theorem,CRT)指出:若一个整数小于一组两两互质的数的最小公倍数,则该数可由其取模运算后的余数唯一确定,即以下方程组具有唯一解。
x=nimi+ri,i=1,2,…,I
(12)
式中:x为需要确定的整数;ni表示未知的整数,称为模糊倍数;m1、m2、…、mI为互质的整数,称为模数;ri为x关于mi的余数。
式(12)的解为
(13)

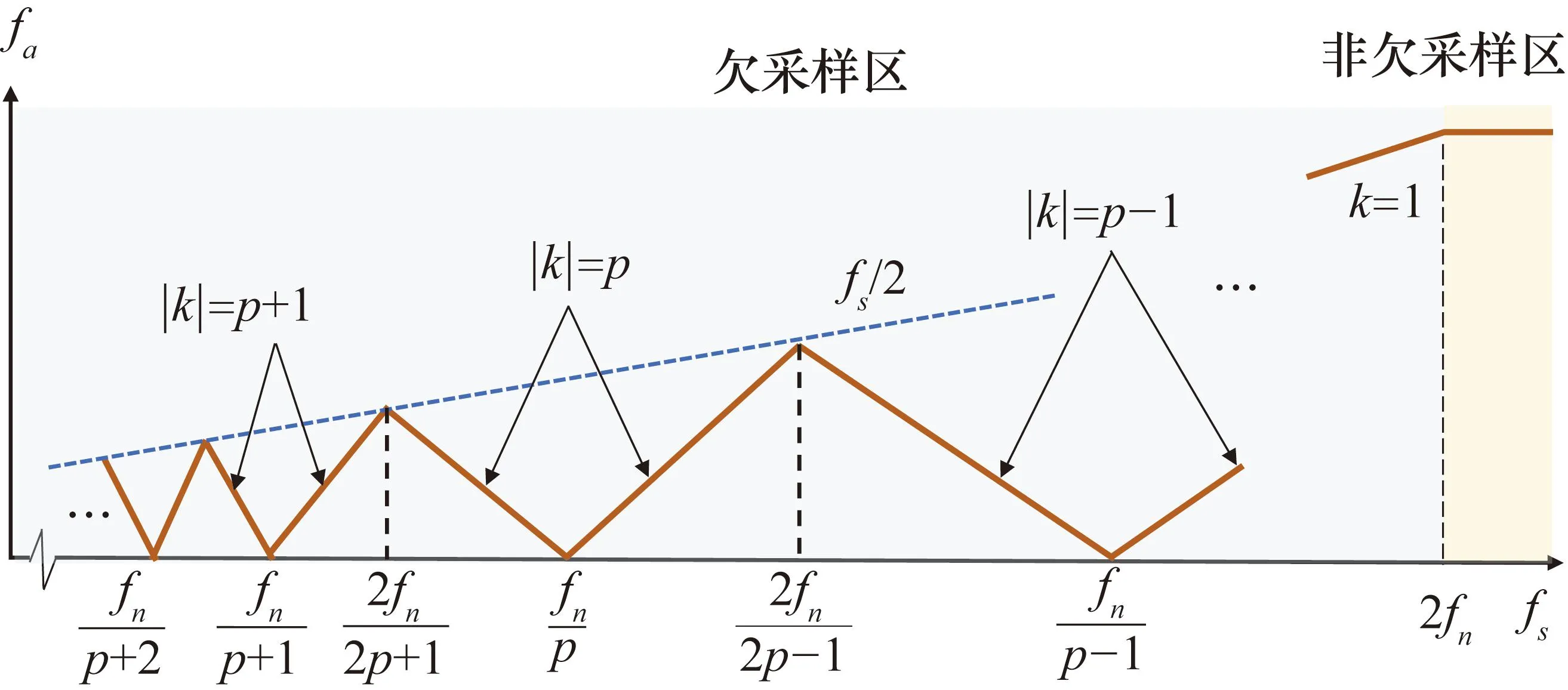
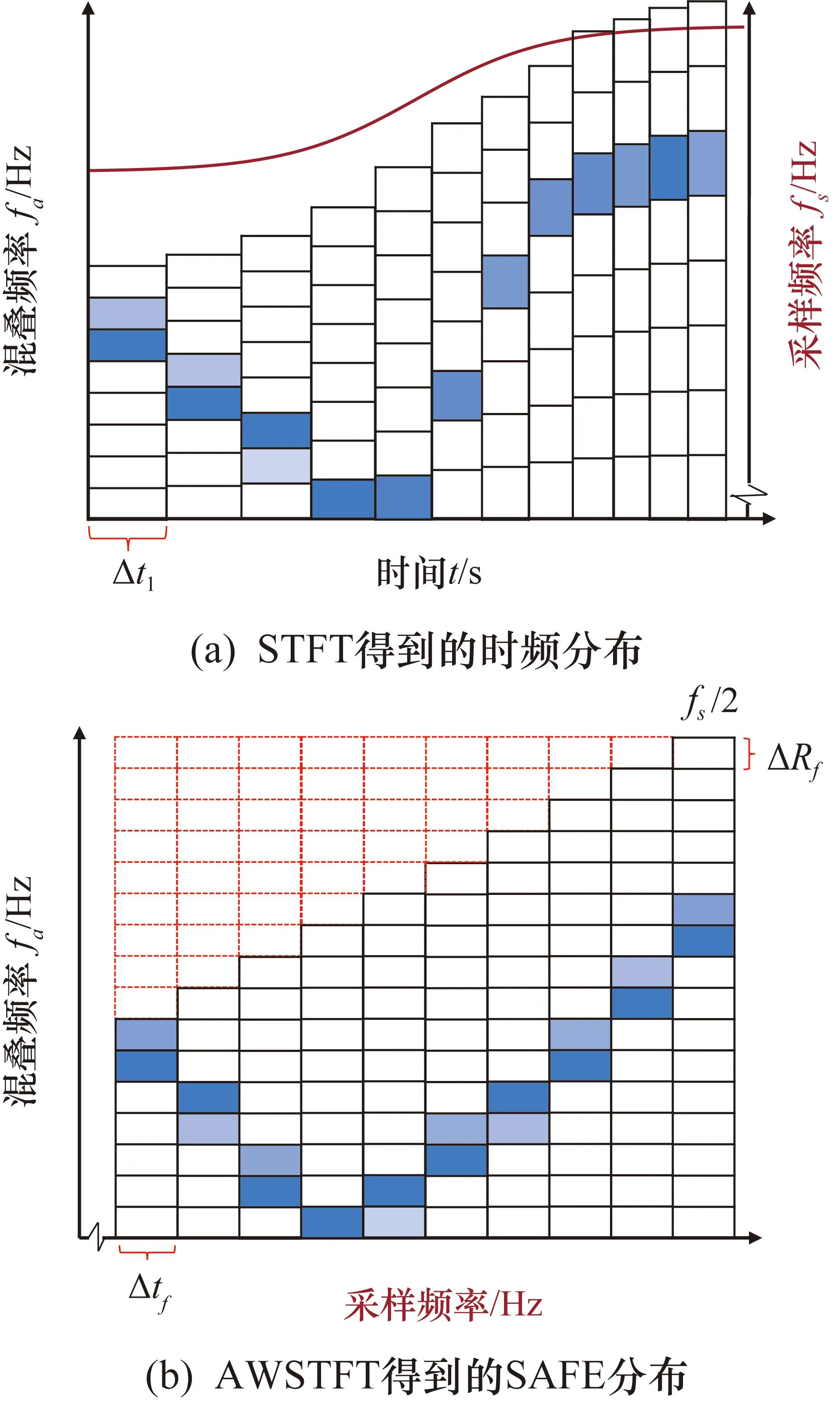
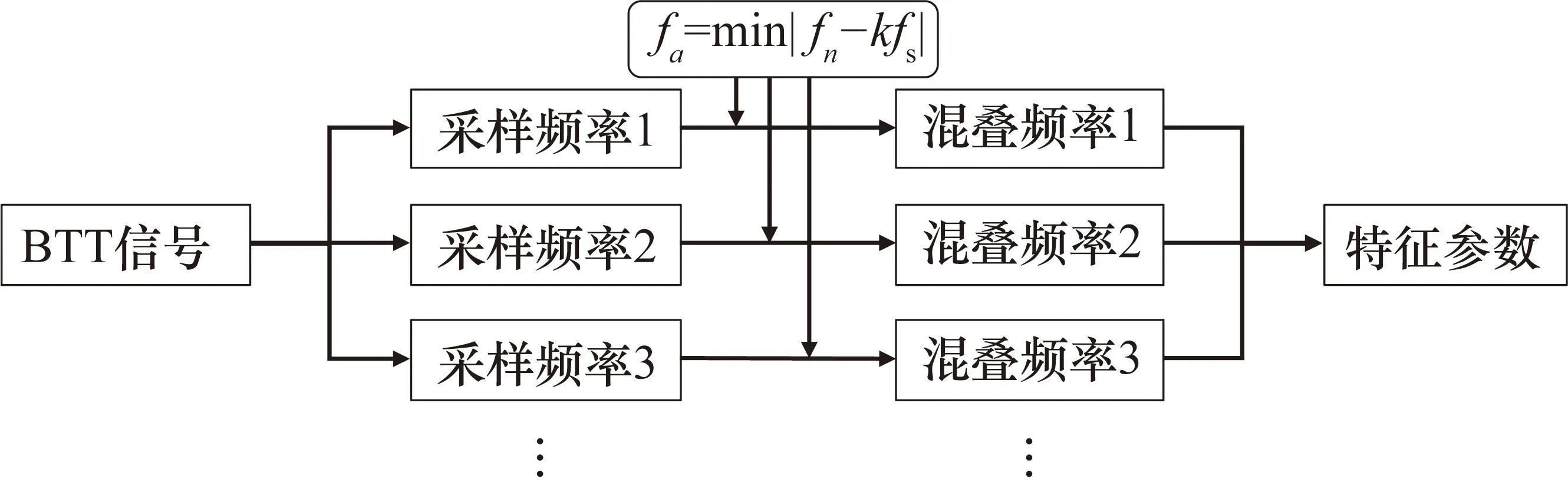
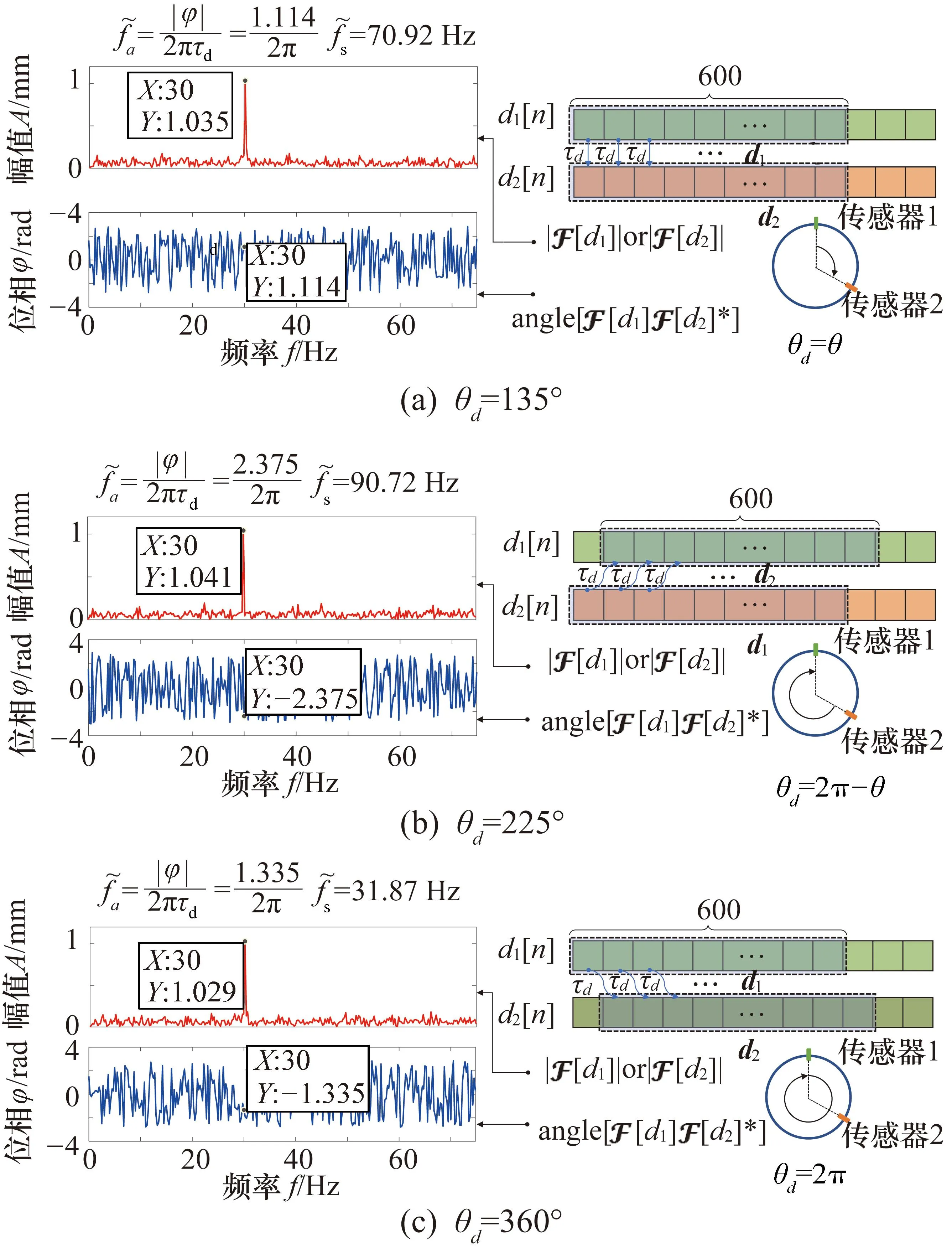
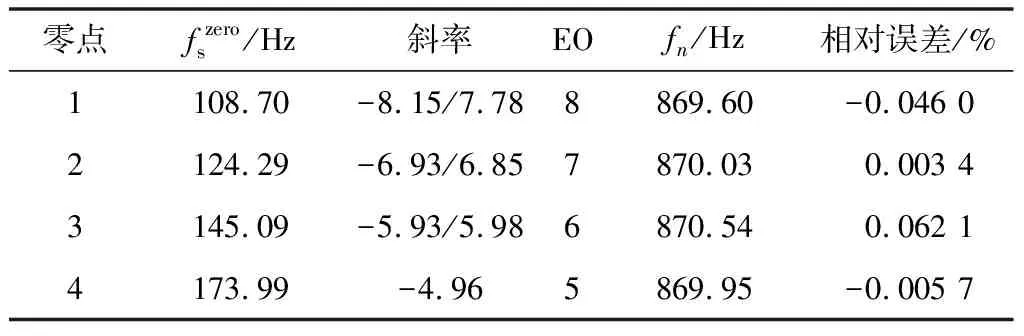
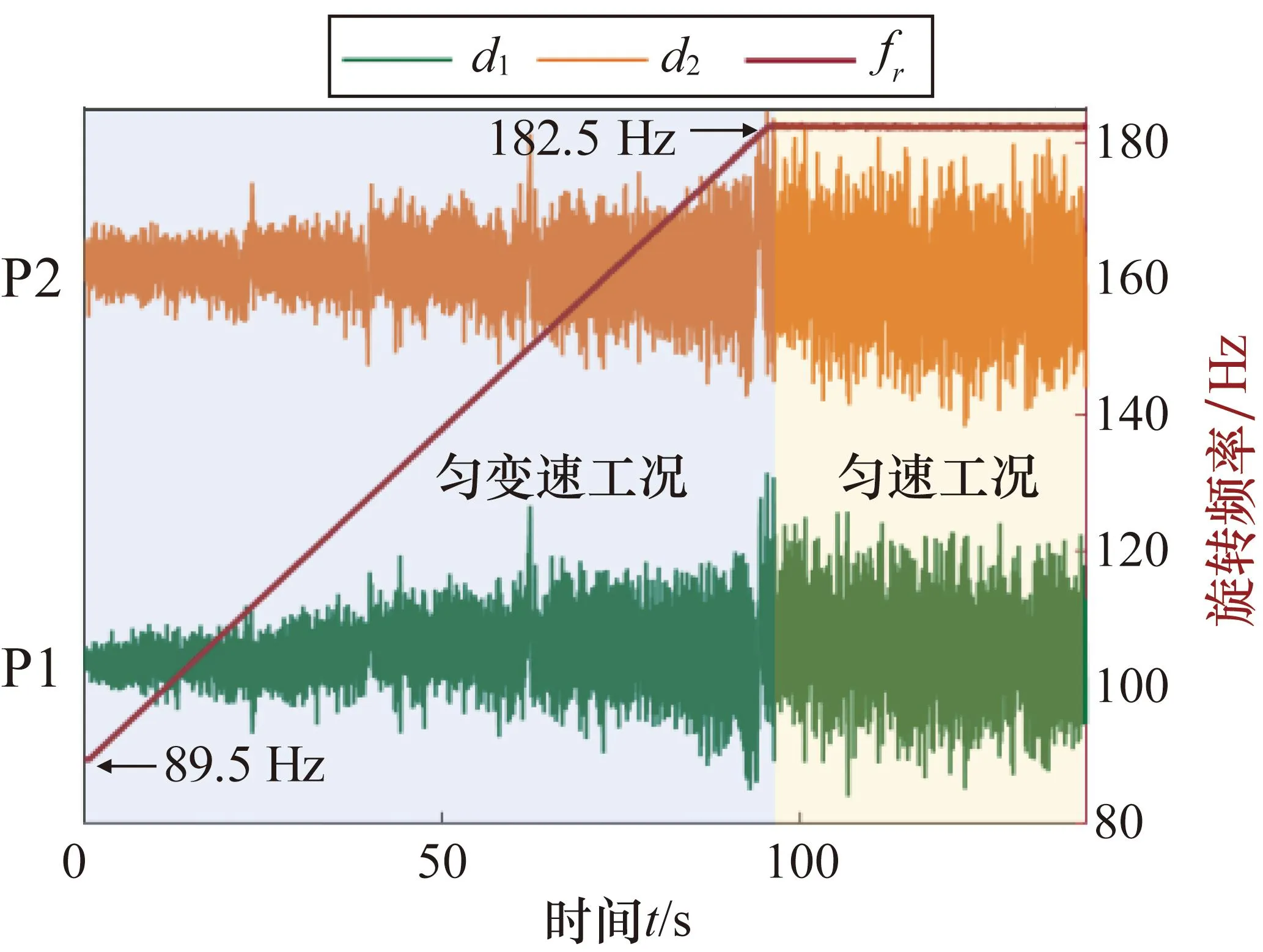
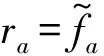
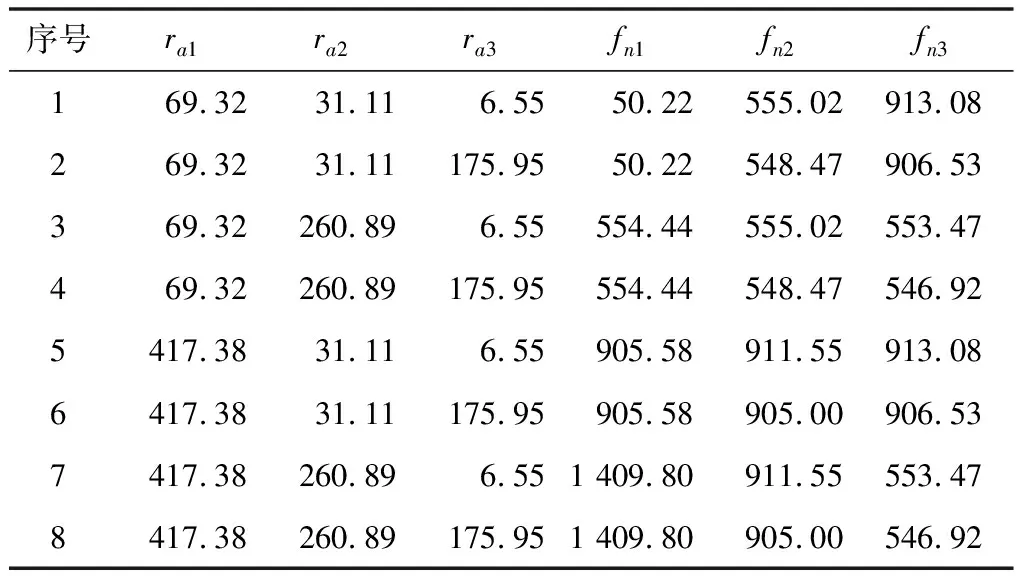
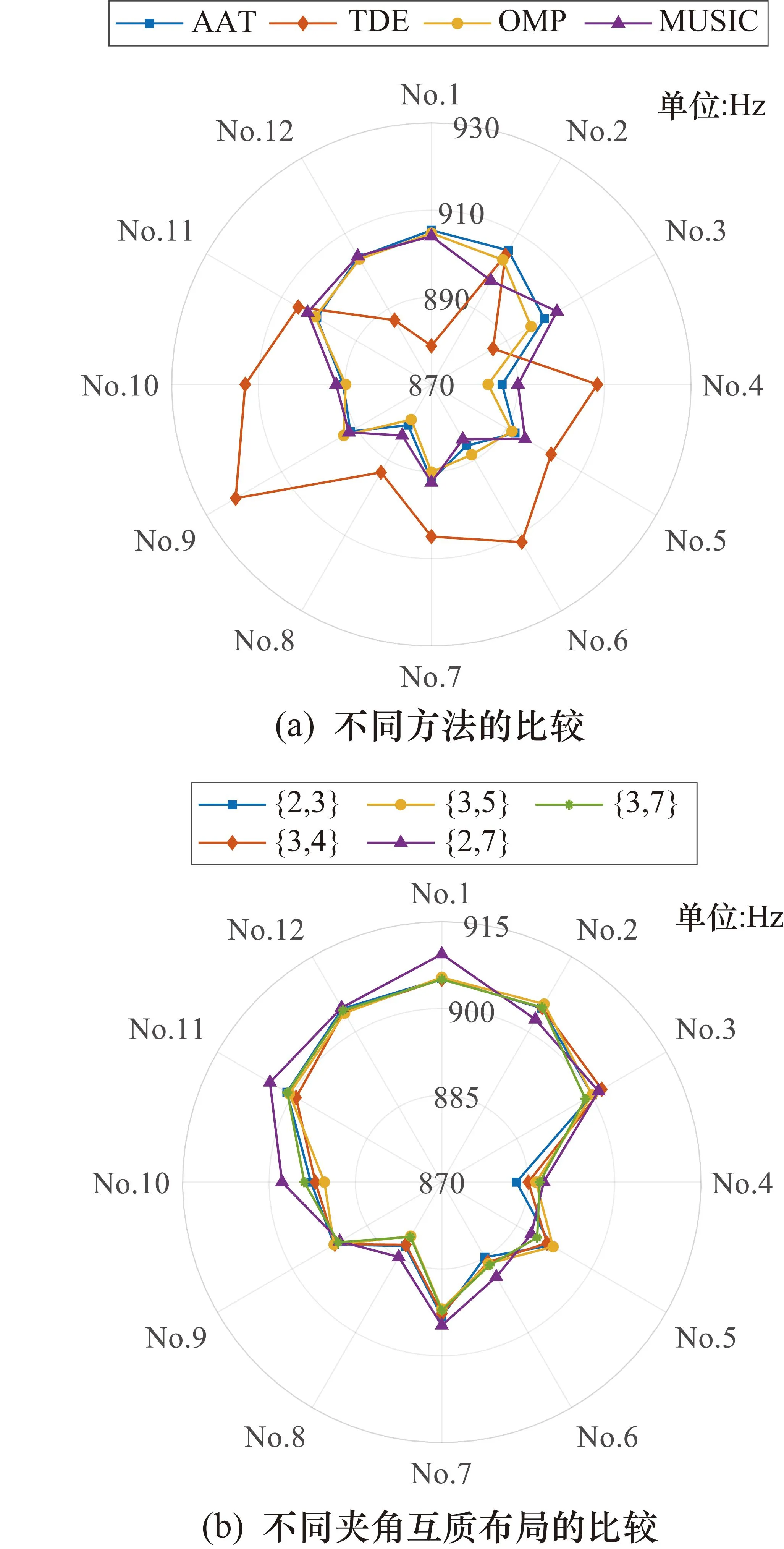
根据CRT,当x CRCRT算法计算复杂性低且对噪声鲁棒,更重要的是,它将重构对象由整数推广到实数域。 2.2.2 固有频率估计 (14) (15) 此外,为确保CRCRT具有唯一解,在双传感器方法中,建议使用夹角互质布局[26]。在该种布局中,θ/(2π-θ)等于两个互质整数c1、c2之比。比如夹角为135°是一种夹角互质布局,因为135/(360-135)=3/5。为重构固有频率,所选用的夹角互质布局至少需要满足(c1+c2)fr≥fn,此时最终结果存在fn和(c1+c2)fr-fn这两个可能的解,需要借助固有频率大致范围这一信息来确定最终解。 第2节提出的双传感方法实现了叶片固有频率的鲁棒估计,适用于匀速工况。下面提出适用于变速工况的单传感叶端定时方法。 根据香农奈奎斯特采样定理,超过fs/2的频率会被混叠到[0,fs],具体的混叠关系为 (16) 式中:k为使得|fn-kfs|取最小值的整数,其相应的最小值等于混叠频率fa。 在变速工况下,叶片的固有频率fn可以近似地认为是恒定的。因此,fa可视为自变量为fs的函数,即fa=h(fs)。不难发现,h(fs)是分段线性函数,可表示为 (17) 式中:A和B为[0,2fn]的子区间。 (18) (19) 式中:∑U为集合/区间的并集运算。 根据式(17),函数h(fs)的图像如图3所示,呈现了采样混叠(Sampling Aliasing FrEquency,SAFE)频率随频率变换的关系。从图3中可以发现:① 在fs=fn/k,k∈Z+处,存在零点;② 零点(fn/k,0)两边的两条直线的斜率分别为-k和k;③ 每条直线截距的绝对值均等于fn。 图3 采样频率与混叠频率的关系 在单传感测量时,采样频率fs恒等于旋转频率fr,因此变速工况等效地实现了变采样率的过程。在零点处,固有频率是转速的整数倍,因此SAFE图的零点表示的实际意义是叶片同步共振中心,零点两边直线斜率的绝对值等于该零点处同步共振的激励阶次(Engine Order,EO),SAFE图中每条直线的截距的绝对值等于叶片的固有频率[29]。叶片振动参数EO和fn都可从SAFE图中提取,SAFE图将振动参数辨识问题转换成了图像特征(直线检测)问题。因此SAFE图是单传感叶端定时测量的核心,需考虑如何构造SAFE分布。 传统时频分布适用于均匀采样,但不适用于变速率的采样,以短时傅里叶变换(Short Time Fourier Transform,STFT)为例: (20) 假设窗函数的长度为NL,则STFT的频率分辨率为 ΔRf=fs/NL (21) 变转速时,叶端定时信号的采样率是变化的,并且STFT的窗长是固定的,所以频率分辨率也是变化的。因此,不同窗函数内数据的分析结果无法横向拼接成完整的时频分布,如图4所示。 图4 不同方法的变采样率信号分析结果 为确保频率分辨率ΔRf恒定,一个与采样频率成反比的窗长因子被引入STFT中: (22) 式中:λs为窗长因子。式(22)被称为自适应窗长短时傅里叶变换(Adaptive Window-length STFT,AWSTFT)。 λs=NLΔRf/fs(a) (23) 式中:ΔRf为人为设定的频率分辨率;fs(a)为第a个窗内数据的平均采样率。 因此初始窗(第1个窗)的长度为fs(1)/ΔRf=NL;第a个窗的实际长度变为NL/λs=fs(a)/ΔRf。AWSTFT的(混叠)频率分辨率是恒定的,因此完整的SAFE分布可以由每一列分析结果横向拼接得到,如图4(b)所示。 除了STFT,其他经典的时频方法,如魏格纳分布、小波变换都可以通过引入与采样频率相关的窗长因子或尺度因子来扩展。传统的时频分布包含了时间和频率两个维度,扩展的时频变换额外增加采样频率维度。由于信号是欠采样的,原本频率是被混叠的,原先的频率维度被称为混叠频率维度。SAFE分布可由扩展的时频变换结果向采样-混叠频率平面投影得到。时频分布和SAFE分布的关系为 (24) 式中:SPEC(t,f)为时频分布;SAFE(fs,fa)是相应的SAFE图;g(t)是描述fs和t的关系的函数,g-1(t)是g(t)的逆函数。 采样频率是分析欠采样信号的一个重要视角。传统信号通常是均匀采样的,因此采样频率维度被忽略了。叶端定时信号的采样率与转速相关,单传感叶端定时测量在变转速工况自然地实现了异步多速率采样,可通过采样频率维度窥视信号特征。 考虑如何从SAFE图提取EO和fn。3.2节已经证明SAFE图中任意直线的斜率和截距的绝对值分别为EO和fn。SAFE图中位于多段线附近的点具有较高的幅值,因此可通过阈值判断提取位于多段线上的点。在此基础上,直线的斜率和截距可通过最小二乘拟合得到,直接得到的斜率和截距不可避免地具有误差。基于在同步共振中,EO是整数的先验,可通过对斜率绝对值取整来校正EO值。 EO=round(|k|) (25) 式中:k为计算得到的SAFE图中某一直线的斜率。 固有频率为 (26) 其他直线检测算法,如Hough变换和Radon变换[30]也适用于从SAFE图中辨识参数。 叶端定时信号恢复/特征提取遵循的基本关系为 h(u)+s(v)=Φ (27) 式中:u和v分别为样本的多样性和先验;h(u)为样本多样性为u时所能得到的信息量,样本多样性越高,信息量越大;s(v)为给定先验v时所得到的信息量;Φ为通过某种信号处理方法所得到的信息量,虽然无法直观地给出信息量具体表达式,但在叶端定时信号处理过程中输入输出的信息量必然是守恒的,即由测量过程得到的信息和由先验得到信息之和等于信号分析结果中包含的信息。 在叶端定时测量中,样本多样性与传感器布局有关。传统的叶端定时信号参数辨识方法可分为直接和间接参数辨识两种。前者基于强先验,比如单自由度振动假设和同步共振,通过特定算法直接获得特征频率、幅值、阻尼等参数。间接参数辨识方法通常指在信号(频谱)重构的基础上,间接地获得振动参数的方法,比如压缩感知。由于重构输出的非欠采样信号几乎包含信号的全部信息。根据式(27),压缩感知类方法对样本多样性或先验的要求更高,因此其需要的传感器数量也更多。 通过以上分析可知,想要实现少传感、低介入测量,信号处理方法应遵循的原则是在不额外输出多余信息的情况下,尽可能地利用先验信息。本文提出的两种少传感器叶端定时方法,均属于直接参数辨识方法,避免了在时域或频域重构信号所导致的信息冗余。此外,两种方法都利用频率混叠规律的先验,即混叠频率和固有频率满足式(16)的关系。所提出的方法在输出最小化信息量的前提下,增加先验信息量,使样本信息量值减小,对样本多样性的要求降低,因此减少了传感器数量的要求,从而实现了少传感、低介入测量。 传统基于混叠抑制策略的方法,首先通过重构得到非欠采样信号,在重构后的信号中,混叠被彻底抑制;然后再对重构信号进行分析得到特征参数,如图5所示。重构信号波形/频谱的要求比识别信号某个特征参数高,所以这类方法对样本多样性或先验提出了更高要求,比如压缩感知就要求感知矩阵具有低相干性,又如带通插值重构类方法要求严格的频率先验(绝对误差不超过fr/2)。 图5 基于混叠抑制策略的BTT方法示意图 而本文所提出的基于混叠利用策略的两种方法,并不对欠采样信号进行重构或插值来抑制混叠,而是在欠采样层面上富集混叠信息,以恢复特征频率,如图6所示。需要注意的是同样利用混叠来降低对传感器数量的要求,双传感和单传感方法使用了两种截然不同的策略。为获得不同的混叠频率,需要改变采样频率。常规的方式是通过传感器布局实现多速率采样,如“5+2”方法。在单传感方法中,通过变转速实现采样频率的变化;在双传感方法中,通过改变所选择两路分析数据相对延时来生成不同的相位信息,以此等效地生成采样频率和混叠信息。 图6 基于混叠利用策略的BTT方法示意图 在叶端定时领域,旋转叶片的响应可被认为是多个正弦信号的叠加[31]。因此,构造仿真信号为 (28) 式中:A0、f0和φ0分别为固有频率、幅值和相位;Ai,fi和φi(i=1,2)分别为转频的第i次谐波的幅值、频率和相位;n(t)为噪声。 仿真参数如表1所示。 表1 仿真参数 双传感器的布局设为[0°,135°],采样持续4 s,并添加了随机的转速波动,其均匀分布在±0.2 Hz范围内。采用主动混叠延时估计对两路采样数据进行分析,考虑前3种延时方案,如图7所示,在这3个延时方案中,延时角度分别为135°、225°、360°。待分析的两组数据之间的相应的延时分别为1/400 s、1/240 s、1/150 s。等效采样频率是延时的倒数,因此分别为400 Hz、240 Hz、180 Hz。对不同延时方案中截取的两个数据向量分别进行傅里叶变换。根据幅值谱中的峰值可确定fa,然后根据fa的位置从相位谱中提取φ,最后根据式(11)计算等效混叠频率。 图7 不同延时方案的主动混叠延时估计示意图 主动混叠延时估计的结果如表2所示。对3种方案的混叠信息两两组合,可联立得到3个方程组: 表2 仿真信号的主动混叠延时估计结果 (29) 使用CRCRT对上述3个方程组进行求解可得到3个重构结果fn1、fn2、fn3。然而,每个延时方案的余数频率存在两个可能的值,因此{ra1,ra2,ra3}的取值共有8种情况,对每一种情况进行求解,可得到如表3所示的分析结果。当{ra1,ra2,ra3}取值正确时,不同的方程组求解结果都是固有频率的近似值,因此是十分接近的。可以看到表3中第4和第5种情况的分析结果具有较高一致性。根据固有频率先验知识,该钛合金叶片的固有频率远高于330 Hz,因此第4种情况得到的频率值{870.10,869.53,868.71}是可信的。将3个估计结果的平均值869.45 Hz作为最终的频率估计结果,与真实值870 Hz相比,其相对误差仅为-0.063%。该仿真结果说明了双传感测量方法的有效性。 表3 仿真信号的频率重构结果 此外,多重信号分类(Multiple Signal Classification,MUSIC)[11]和基于压缩感知的正交匹配追踪(Orthogonal Matching Pursuit,OMP)[2]已被证明是有效的基于多传感的频率辨识方法。因此将所提的双传感方法(Active Aliasing Technique,AAT)和TDE以及MUSIC、OMP进行比较,其中AAT和TDE使用了2支传感器,MUSIC、OMP使用了5支传感器。不同信噪比下,频率辨识结果的均方根误差情况(统计次数为100)如图8(a)所示,可以看到所提方法明显优于传统的延时估计,性能接近于基于5传感的OMP和MUSIC方法。其次,对不同夹角互质布局下,所提双传感测量方法的有效性进行了验证,结果如图8(b)所示,图例中的每一对互质数都表示一种双传感布局,{c1,c2}表示夹角为c1/(c1+c2)的双传感布局。可以看到不同的夹角互质布局的性能大致相似,其频率辨识的均方根误差远小于1 Hz,这充分说明了所提方法的有效性。 图8 频率估计的均方根误差统计 为进一步说明双传感测量方法的实用性,不同方法500次测试的平均运行时间如表4所示。测试环境:(CPU i5-10400F,RAM 16GB,MATLAB 2020a)。为了具有可比性,不同方法输入的数据的时间长度保持一致,均为4 s。可以看到AAT的计算效率远高于MUSIC和OMP,仅为0.355 ms,虽然其运行时间略高于传统延时估计,但时效性足以适用于在线监测。 表4 不同方法的运行时间比较 采用AWSTFT对在变转速工况下单支传感器测量得到的位移信号进行分析,(混叠)频率分辨率设置为0.8 Hz,得到的SAFE分布如图9所示。需要说明的是,单传感测量的数据已提前进行趋势滤波,以去除同步振动的干扰。此外,图9中的幅值已被归一化,高亮线条表示不同采样率下固有频率的混叠结果。对SAFE图中直线参数的辨识结果如图9所示,其中绿色数字表示不同直线的斜率,橙色数字表示零点处的采样频率,即同步共振区的转频。 每个零点表示一个潜在的同步共振区。在不考虑测量噪声和计算误差的情况下,零点附近2条直线斜率的绝对值等于该零点对应的同步共振区激励阶次EO。在实际情况下,直线斜率的绝对值与EO值存在偏差,在同步共振区,EO是整数。因此不同共振区的EO值可通过对相应直线斜率的绝对值取整得到。根据式(26)可计算叶片的固有频率,单传感器参数辨识分析结果如表5所示。可以看到单传感测量方法的相对误差在±0.1%以内。该仿真结果验证了单传感测量方法的有效性。 表5 仿真信号的单传感方法参数辨识结果 本节对所提出的双传感和单传感叶端定时测量方法进行实验验证。 采用如图10所示的高速转子叶片实验平台,叶盘为直径196 mm的钛合金叶盘。实验台上安装了5支叶端定时传感器,但在验证双传感方法时,仅分析其中的2支夹角为135°的传感器,即图10中的传感器1和传感器2。在验证单传感方法时,仅使用了传感器1测量到的叶端定时数据。 图10 实验平台及传感器布局 传感器1和传感器2采集到的叶端定时位移如图11所示。实验过程包含了一段匀变速和匀速过程。由所提出的双传感和单传感测量方法分别对匀速和匀变速工况下测量到的叶端定时数据进行分析。 图11 叶端定时所采集的叶片1的振动信号 此外,OMP和MUSCI已被证明是一种有效的频率辨识方法,可用于多叶端定时传感测量情况下,旋转叶片的固有频率识别。MUSIC和OMP的准确性与传感器数量和布局有关,通常采用3支以上传感器的布局。在该高速转子叶片旋转实验中,使用MUSIC和OMP对5支传感器采集到的数据进行分析,将得到的结果作为参考,以验证所提方法的有效性。 表6 实验信号的主动混叠延时估计结果 表7 实验信号的频率重构结果 将第6种情况得到的重构结果的平均值作为最终的频率估计结果,fn=(905.58 + 905.00 + 906.53)/3 = 905.70 Hz。采用OMP方法对相同区域内5支传感器采集到的数据进行分析,得到的叶片频率为905.8 Hz。将其作为叶片的固有频率,可知所提的双传感参数辨识方法的相对误差仅为-0.011%,说明了方法具有有效性。 不同方法对所有叶片的频率识别结果如图12(a)所示,可以看到AAT的辨识结果与基于5支传感器的OMP和MUSIC方法结果相似,而传统TDE方法由于较差的鲁棒性,频率估计结果不准确,在实际频率测量中存在30 Hz以上的频率误差。不同夹角互质布局下,所提方法的频率辨识表现如图12(b)所示,不同布局得到的结果是相似的,最大误差不超过3 Hz,这充分说明了双传感测量方法的有效性。 图12 所有叶片的频率估计结果 使用AWSTFT对转速为89.5~182.5 Hz的匀变速阶段单支叶端定时传感器采集到的数据叶片1的叶尖位移进行分析,得到的SAFE图如图13所示。原始位移数据的趋势被去除以消除同步振动成分对参数辨识的干扰。图13中高亮线条表示叶片固有频率的混叠轨迹。对SAFE图中直线参数的辨识结果如图13所示,其中绿色数字表示不同直线的斜率,橙色数字表示零点处的采样频率,即同步共振区的转频。 图13 由AWSTFT得到实验信号的SAFE分布 图13中,从左向右分别标记了第1~4个零点。理想情况下,零点处直线斜率的绝对值等于相应同步共振区的激励阶次EO。在实际存在噪声和误差的情况下,EO可通过对直线斜率取整得到。EO与零点处采样频率的乘积等于叶片固有频率估计值,分析结果如表8所示。 表8 实验信号的单传感方法参数辨识结果 采用OMP方法对SAFE图中的4个共振区附近5支传感器采集到的数据进行分析,得到的叶片频率分别为893.8 Hz、894.8 Hz、898.8 Hz、905.3 Hz,这些值作为所提方法辨识结果的参考。与参考值相比,单传感测量方法实验数据分析结果的最大相对误差仅为0.165 4%,该实验结果验证了单传感测量方法的有效性。 为实现低介入叶端定时测量,分别提出基于主动混叠和解混叠的双传感方法和基于采样-混叠频率分布的单传感方法用于匀速和变速工况下叶端定时叶尖振动参数辨识。在仿真和实验分析中,将所提方法频率识别结果与参考值进行对比验证,结果表明了所提出的两种少传感叶端定时测量方法的有效性。 在双传感测量方法中,采用大角度布局,利用相位和延时生成一系列混叠信息,通过对混叠信息解模糊来重构固有频率,有效地避免了因采用传统延时估计方法直接求解固有频率所导致的较大误差。 在单传感测量方法中,所提出的采样-混叠频率分布将振动参数辨识问题巧妙地转换为图像特征识别问题。此外,采样-混叠频率图提供了不同转速下,叶片振动阶次和固有频率信息,在叶端定时信号处理等欠采样信号分析中,有望取代坎贝尔图成为新的参考。 现阶段,所提出的少传感方法仍不适用于速度剧烈变化的工况下叶端定时信号的分析,进一步改进少传感方法将是未来的研究重点。




3 单传感低介入叶端定时方法
3.1 采样混叠分布
3.2 扩展的时频变换

3.3 参数辨识

4 低介入叶端定时测量理论

5 仿真验证
5.1 仿真说明

5.2 双传感测量方法






5.3 单传感测量方法
6 实验验证
6.1 实验说明

6.2 双传感测量方法

6.3 单传感测量方法


7 结束语
