基于地铁综合监控的动态无功平衡控制研究
2024-01-30张国明陈振敏吴志秋
殷 杰,张国明,陈振敏,吴志秋
(1.广州地铁建设管理有限公司,广东广州 510250;2.广州新科佳都科技有限公司,广东广州 510700)
1 引言
目前,国内地铁供电系统多采用110/35kV 两级电压制式、集中供电方式[1]。电能输送过程中110/35kV电缆对地分布电容效应显著,会产生大量的容性无功功率。正常运营时段,各类感性无功功率所占比重较大,可中和电缆产生的容性无功,系统功率因数较高[2]。而夜间停运时,大量感性负荷退出运行,电缆产生的容性无功所占比例突出,导致容性无功功率倒送,降低系统功率因数,对电网系统产生干扰。如果不做好无功平衡、削减无功部分的占比,地铁的公共连接点功率因数很难稳定在 0.9 以上[3]。这些现象带来的谐振、电压波动、闪变、电压畸变、三相不平衡等问题可造成设备供电不足、损耗增加、设备损坏、稳定度降低等危害,进而影响到地铁各系统运行安全和可靠性。因此,合理进行无功补偿是保证地铁电能质量和电网稳定运行的必要手段。
2 系统概况
2.1 系统集成
(1)综合监控系统。综合监控系统(ISCS)是构建在通用硬件平台基础上的大型监控软件系统,通过集成和互联地铁各机电子系统,形成综合统一的监控管理平台,实现地铁机电系统信息互通、资源共享、综合联动等功能,并最终达到优化运营管理模式及提高运营效率等目的[4]。
(2)无功平衡控制系统。动态无功补偿装置是一种能够快速实时跟踪负荷无功功率变化的无功补偿装置[5]。动态无功平衡控制是一种用于提高电力系统稳定性的技术手段。在电力系统中,负载的无功功率需求与供电网的无功容量之间的不平衡会导致电网电压的波动和电力系统的不稳定,进而影响电力系统的正常运行。动态无功补偿控制系统集成于ISCC 中,通过去中心化的控制方法实现无功功率的精准分配,利用动态一致性算法获得所需的全局平均信息[6],改善系统的无功功率平衡,提高电网的稳定性。
(3)集成优势。动态无功平衡控制系统的数据处理、监控功能、人机界面均由ISCS 完成,正常状态下集成的相关系统依赖ISCS 实现正常操作功能。ISCS 具备较全面的地铁设备及环境的运行数据,能够全面地采集各场所用电量和电能质量情况,持续跟踪谐波治理及无功补偿后系统的电能质量情况,利用动态无功平衡控制技术,改善能耗指标,从而达到节能的目的。
2.2 研究目的
低功率因数的供电系统将大量吸收城市电网无功,给城市电网带来不利影响[7]。地铁线路运营商也会由此遭受城市电网开出的巨额罚款[8]。为此,本方案研究目的如下。
(1)满足城市电网计费考核。在110 kV 主站本侧高压侧(T 接)或在110 kV 主站对侧(专线)的平均功率因数需要满足供电局计费考核要求。功率因数的取值范围包括1、0.95、0.9、0.85,并且可以调节,考核采样频率取值范围包括15 min、0.5 h、1 h、日、周、月,也可以进行调节。
(2)降低电网有功损耗。考虑到变电站运行动态无功功率优化控制必须跟随变电站资源调度要求,将变电站无功功率调度偏差最小作为第一优化目标[9]。网络化动态无功平衡控制系统根据潮流计算结果,生成最优的无功补偿策略,并按照无功补偿策略,自动或手动向无功补偿设备发出无功调节指令,对电力系统各个节点进行定量的无功补偿,以降低电网中有功损耗。
(3)动态连续的无功控制调节。网络化动态无功平衡控制系统能够根据实时采集的开关刀闸分合状态,实时形成控制分区,控制分区之间相互独立。控制分区能根据网络拓扑的改变而实时改变。无功控制系统能够根据历史的无功控制策略来确定当天同一时间段的无功控制策略。
(4)功率因数复核。网络化动态无功平衡控制系统能够对供电局考核周期内的实际平均功率因数进行复核。在考核周期的后期,网络化动态无功平衡控制系统能够根据该周期的平均功率因数,动态调整该周期接下来的时间段的目标功率因数,以确保整个考核周期的平均功率因数满足供电局计费考核要求。
2.3 系统功能
由于地铁“夜间检修、白天运营”的特点,每天不同时段的负载性质不同,在固定的时间段,也存在着供电系统功率因数无法满足供电部门要求的情况[10]。针对行业现状,广州地铁10 号线采用了基于综合监控系统进行无功平衡控制的方案,当电力系统运行时,综合监控系统采集到电抗器和同相供电装置的各类数据,通过无功平衡算法对数据进行运算处理,计算出合理的无功调整策略进行无功补偿操作,从而保证电压质量和电网运行稳定。
根据广州地铁10 号线现场电力设备部署情况,在110 kV 主变电所(以下简称“主所”)集中进行无功治理。通过使用同相供电装置和电抗器,成功地补偿了电网无功功率和谐波电流,显著改善了供电系统的电能质量。方案实施后实现了监视、策略控制、定时任务、功率因数自动复核、人工控制事件记录、自动控制事件记录及参数管理等功能。
(1)监视功能。监视功能包括无功设备基础状态和电气信息监视2 部分。无功设备基础状态通过电力监控系统实时采集,经ISCS 实时平台处理后,以用户界面方式在组态中展示;实时功率因数、总有功损耗等电气信息是通过对电力监控系统提供的电气数据进行潮流计算后得出并展示在组态中。
(2)策略控制。策略控制包括历史策略控制和实时策略控制2 种方式。操作员可在ISCS 界面选择不同的控制方式,生成对应的控制策略并通过网络通信引擎(Internet Communications Engine,ICE)接口发送到电力控制程序(PscadaAgent),通过物联网网关(IoT gateway)下发到子系统。
(3)定时控制。用户可在客户端设置好定时任务的相关参数,包括预期的功率因数、无功平衡的控制设备组合等,客户端即可控制开启/关闭定时任务,后台服务PscadaAgent 将进行定时检查和处理任务。
(4)功率因数自动复核。该系统每分钟存储潮流计算后的实际功率因数,每日0 点统计前一天的日平均功率因数,计算过程如图1 所示。在功率因数复核的时间点,求出本考核周期的日平均功率因数。如果该日平均功率因数低于考核要求,低于部分将在该考核周期的后期补足,使整个考核周期的日平均功率因数满足用户要求。
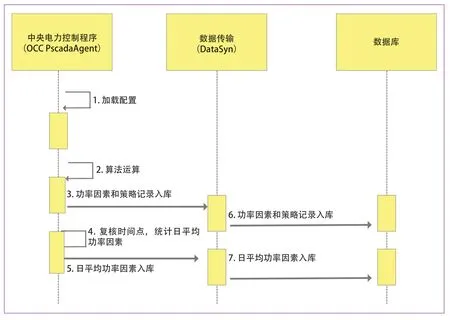
图1 功率因数自动复核过程示意图
(5)人工控制事件记录。系统可实现对电力调度员(PscadaManager)向PscadaAgent 下发的人工控制命令的记录,具体过程如图2 所示。PscadaAgent 调用ICE 接口下发策略控制。
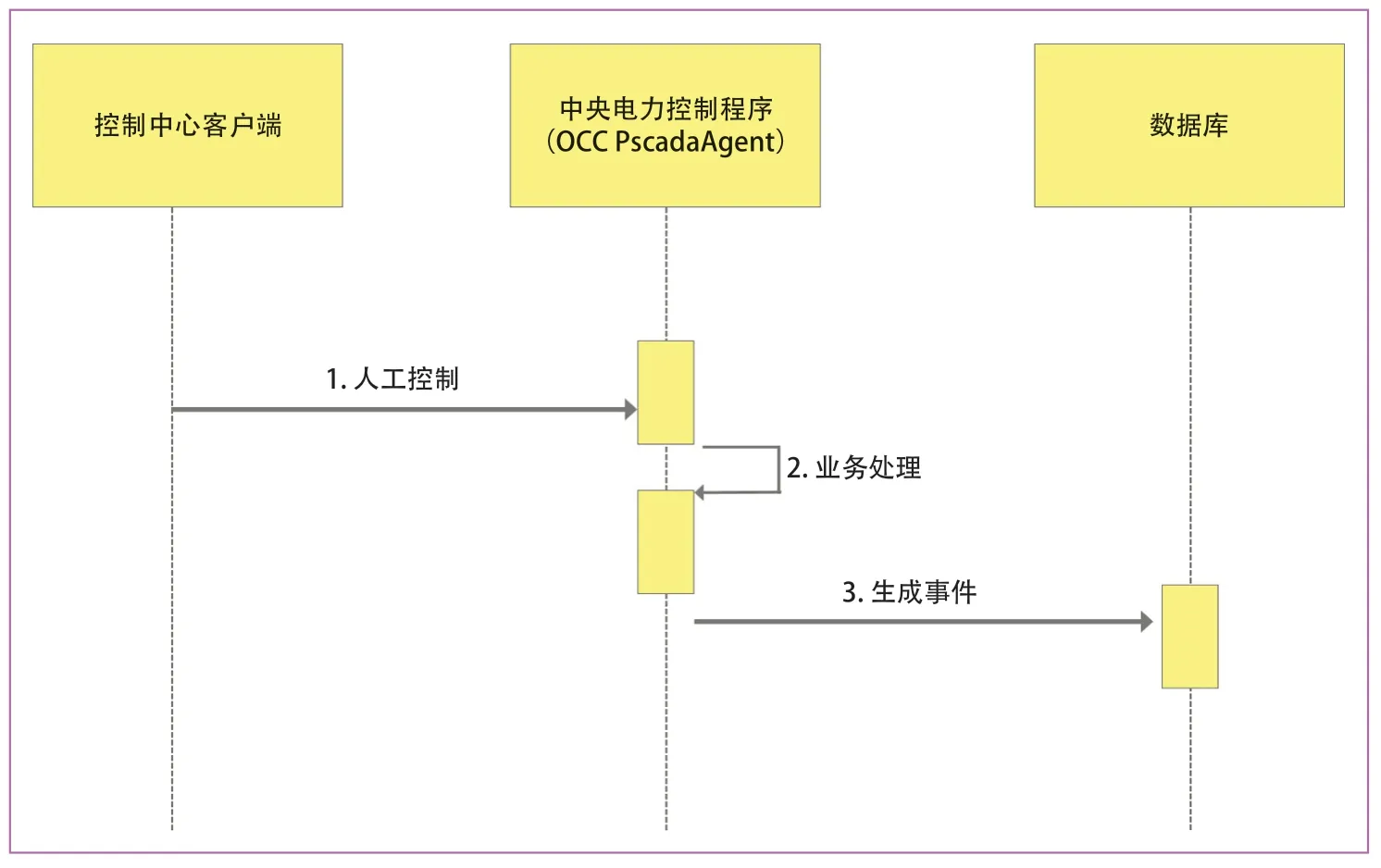
图2 人工控制事件记录过程示意图
(6)自动控制事件记录。系统也可实现对自动控制事件记录,即定时任务下PscadaAgent 自动下发策略的记录,如图3 所示。
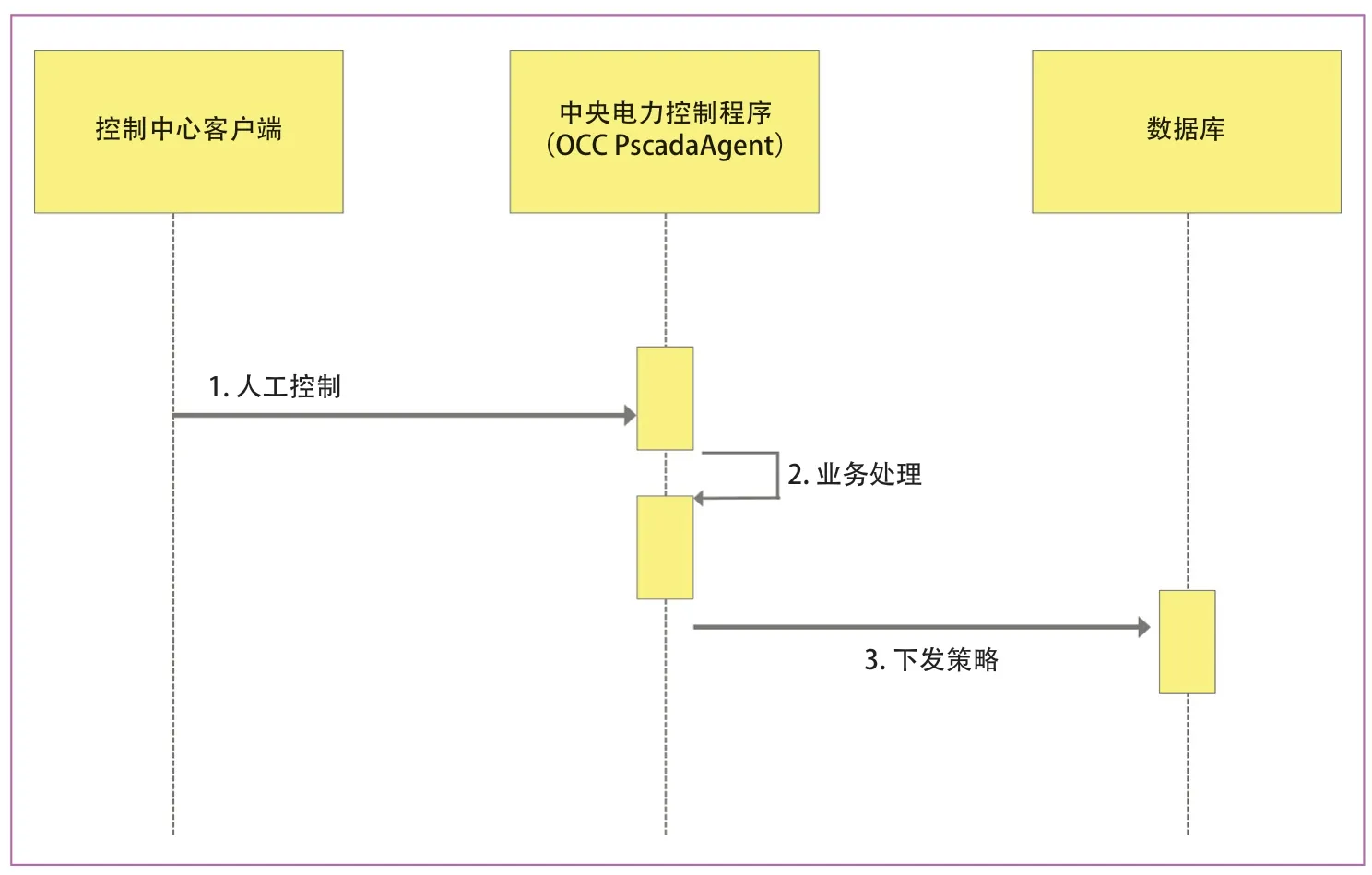
图3 自动控制事件记录过程示意图
(7)参数管理。操作员可查看网络化动态无功平衡控制系统的相关参数信息,包括功率因数考核值、考核周期、补偿设备优先级、电抗器档位等,并可对上述参数进行编辑。
3 计算原理
网络化动态无功平衡控制系统作为广州地铁10号线供电系统中的一个重要组成部分,用于维持系统中的无功功率平衡,以确保稳定的电力供应,保障运营安全。以坑口主所I段供电区段为例,详解无功补偿算法如下。
3.1 设定电气节点
根据坑口主所I 段供电区间设计图纸,画出系统等值电路网络,并设定电气节点,其中含能馈装置的电气节点位于节点4,对应广钢新城站,如图4 所示。

图4 坑口主所I 段33 kV 环网供电等值电路网络
3.2 能馈装置最优无功出力求解
在已知33 kV 电缆等值电阻、电感、电容、单回路径长度、各节点进出线功率、电压、能馈装置最大的无功出力等参数后,以系统有功损耗Ploss最小为目标,将能馈装置的补偿量QD作为控制变量建立无功优化数学模型,通过粒子群算法得出能馈装置的输出容量,即无功补偿策略,求解方法如下。
目标函数表达式为:
式(1)中,n为供电系统支路数;Plossk为供电区间内第k个电缆支路的有功损耗;Ploss为各条电缆的有功损耗的累加值。
考虑到补偿时供电系统也需要满足一定的约束条件,如保持节点电压在正常范围内偏移(±5%)、公共连接点功率因数大于0.9、系统功率平衡等即有约束条件。
其中不等式约束条件为:
式(2)中,Ui为33 kV 母线电压,系统中所有母线电压的数值是会随着无功的变化而变动的,国家标准规定母线电压不能超出一定的范围,此算法中设定的电压波动范围为±5%,即任意母线电压最小值Uimin=33×(1 -5%)=31.35 kV,任意母线电压最大值Uimax=33×(1+5%)=34.65 kV;QiD为系统中第i个能馈装置的无功补偿值,由于其最大出力受到容量的限制,因此无功补偿时存在最大的补偿容量QDmax(以坑口主所I 段供电区间为例,区段内仅广钢新城站装设有能馈装置,假设该补偿装置的最大无功出力为2 MVar,则最大的补偿容量QDmax=2 MVar);QDmin为设定的无功补偿最小值,一般QDmin=0.1 MVar;cosφiPCC表示第i个计量考核点的功率因数,通常设为0.9。
等式约束条件为:
式(3)中,Ni为与节点i关联的节点集合,包含节点i,b为平衡节点;NPQ为PQ节点集合;Pi、Qi为注入节点的有功功率和无功功率;Uj为与该车站有电缆连接的母线电压;Gij为电缆电气等效电路中电阻的倒数;Bij为电缆电气等效电路中感抗的倒数,表示车站间母线电压的夹角值。
由于节点电压和无功补偿量为状态变量,在求解过程中可能会出现状态变量的数值超过定义范围,因此需要建立罚函数F对变量进行限制。
式(4)中,μUi、μBi为罚因子,一般取较大的正整数;NB为补偿装置节点集合;Uilim、Qilim为状态变量可取到的极值,当状态变量超过极值时,将状态变量赋值为状态极值。
3.3 求解考核点的实时功率、功率因数、总无功补偿值
在已知110 kV 电缆等值电阻、电感、电容、单回路径长度、主变压器电气参数、节点进出线功率、电压以及10 号线和1 号线总的无功补偿量Qz10、Qz1等参数后,基于电力系统潮流计算方法得到坑口主所I 段计量考核点,对应图5 中电气节点①的功率、功率因数等电气信息,得到计量考核点功率因数满足0.9 时系统总的无功补偿量Qz,具体算法如下。

图5 坑口主所I 段供电区段潮流计算等值电路
设供电系统中无功补偿装置数量为n,补偿装置容量为X,则第i个粒子位置随机分布在容量X中,即有Xi={xi1,xi2,…,xin}T;粒子速度随机分布于[-1,1]内,即Vi={vi1,vi2,…,vin}T;具体优化流程如图6 所示。

图6 粒子群算法优化流程
(1)算法设定。设定种群粒子数m、最大迭代次数kmax、惯性权重ω和学习因子c1、c2。
(2)惯性权重改进。惯性权重的大小会影响粒子种群对空间探索结果的全局性,为了使算法更好地找到最优解,需要对惯性权重进行优化。开始迭代时需要对全局进行搜索,从而确定最优解的大致范围,此时设定较大的起始惯性权重。随着迭代次数的增加,需要对定义空间进行细致地寻找,此时应逐渐减小惯性权重,这有利于提高算法精度,找到全局最优解。设定惯性权重 :
式(5)中,ωmax为最大惯性权重,一般取0.9;ωmin为最小惯性权重,一般取0.4;k为迭代次数;kmax为最大迭代次数。
(3)算法初始化。对种群初始化粒子进行潮流计算,根据适应度函数得到粒子初始适应度值,初始个体最优位置Pi,即Pi={pi1,pi2,…,pin}T和初始全局最优位置Pg,即Pg={pg1,pg2,…,pgn}T。
(4)粒子位置、速度更新。要确保粒子速度和位置符合要求,若迭代粒子位置结果超过了最大补偿装置容量X时,调整此时xid为容量最值;粒子速度超过速度最值,调整此时vid为速度最值。
(5)适应度值判断。计算更新后的粒子系统损耗值,比较此时适应度值与前一次适应度值,更新个体最优位置和全局最优位置。
(6)迭代更新。重复步骤4、5,判断是否达到最大迭代次数。若达到最大次数,算法结束,输出补偿容量,即补偿策略;否则再次更新粒子速度和位置,直至迭代次数达到最大。
3.4 无功补偿量分配
根据获取到的Qz10、Qz1和计算得到的总的无功补偿量Qz,按补偿比例得到对应10 号线总的无功补偿量QB10,将10 号线总的无功补偿量QB10分配给广钢新城站能馈装置。
4 应用情况
本系统应用于:广州地铁10 号线既有段5 座车站,含2 座换乘站;新建段14 座车站,含10 座换乘站,1 座车辆段,2 座主变电站。其中,补偿设备包括在主所的电抗器和车站的能馈装置,工程主变电站内均配备电抗器和同相供电装置。利用既有的综合监控网络,将电抗器和同相供电装置接入网络化动态无功平衡控制系统中,对其进行无功补偿操作,如图7 所示。

图7 无功设备总览界面
根据现场网络及设备部署情况,无功控制系统采用集中控制方式,在110 kV 主所集中进行无功治理,通过对同相供电装置和电抗器补偿电网无功功率和谐波电流,全面改善供电系统的电能质量。以变电站功率损耗作为评价指标,功率损耗越高表示变电站运行动态无功功率优化控制效果越差[11]。选择该线路自2023 年9 月1 日至7 日实际运行数据进行分析,功率因数稳定在0.9以上,如表1 所示。

表1 功率因数比对表
从以上统计数据可知,变电站负荷得到了更为有效的调整,该个案变电站的电源母线负荷实现了更高程度的统一,使得电网负荷更加平衡[12]。
5 结语
地铁线路建设中,需要考虑供电系统无功功率的就地平衡问题。如果无功补偿容量的计算不够精确,计算值小于实际需要的补充量,将直接造成公共连接点(PCC)功率因数不合格的后果,而且在线路运营后再改造的成本和难度都会很大。若故意夸大补偿容量,将直接造成不必要的设备投资[7]。广州地铁10 号线采用的基于综合监控的动态无功平衡控制系统,保证了地铁供电系统的功率因数在不同时段均能满足电力系统的要求。该系统通过优化无功功率流动和电压稳定性,减少电能损耗,提高电力系统的效率,有效避免了电压波动和电力质量问题,实现地铁安全和可靠运行。
