吸力桶基础安装调平控制系统在长乐海上风电项目中的应用
2024-01-30张继彪夏月
张继彪,夏月
(中交第三航务工程局有限公司,上海 200032)
0 引言
近年来,我国海上风电项目发展迅猛,风场的水文与地质条件越来越恶劣和复杂,采用传统单桩及高桩承台结构的施工难度及成本越来越高。针对深远海区域,目前推行的一种结构形式为桶式基础结构[1],其为一种非打入性浅基础,直径大,高度小,通常采用吸力下沉,在工程勘探造价和用钢量方面,比较经济;采用压力差下沉技术,打破了传统桩基础使用打桩锤的概念,不用考虑水深较大时对桩基的稳性强度要求,也避免了在水深较大海域中打桩船安装施工的费用较高的问题。随着桶式基础这一新型结构在海上风电行业的大力推广,其需求会越来越大。
目前国内在吸力下沉技术及相关装备领域空白较多,自主施工案例较少。文献[2]针对复合筒形基础设置分舱、沉放、调平控制等进行了研究,利用分舱板使基础沉放临界负压降低约10%,有效减少调平临界倾角,降低了单筒基础结构施工难度;文献[3-4]分别利用桶盖圆周上布置的多个振动机构与真空泵控制排出桶内空气及海水,以达到沉放目的,前者通过控制电磁阀的通断频率使气动冲击锤产生撞击力来调节桶形基础的平衡,后者通过控制比例阀的阀门开度来保证基础的垂直姿态。但以上调平措施与方案多以手动操作为主,对于沉贯中多变的控制条件难以做到及时有效的响应。
桶式基础安装施工中,能否下沉至设计深度及下沉过程中的姿态控制是施工成败的决定性因素。如果桶式基础沉放失败,出现倾斜或沉放深度不够,则其稳性和承载力都将会受到很大影响,因此有必要针对桶式基础的安装施工调平控制技术开展深入研究,并研制相应的专用施工装备,验证基础施工工艺的可行性、调平策略的可靠性及专用施工装备的功能、能力及稳定性。本文以长乐外海海上风电C 区项目为依托,针对桶式基础吸力下沉研发专用安装设备,研究吸力下沉中的姿态调平控制流程、控制工艺及控制算法,在基础下沉中对吸力桶顶面垂直度进行全过程的监视与实时自动调整控制,保证施工的安全和沉放过程的稳定和准确。
1 工程概况
1.1 三桶吸力桶式基础安装施工项目
本项目位于福州市长乐区东部海域、闽江口南岸,场址距离长乐海岸线31~50 km 海域,平均水深37~45 m,海底泥面高程-37~-45 m(1985 国家高程)。该海域作业水深,海床面覆盖层主要为淤泥、淤泥质粉质黏土等软土地质,具有涌浪大、波长长、平均风速大、可作业天数少等特点。
具体吸力桶施工工艺流程如图1 所示。

图1 吸力桶施工工艺流程Fig.1 Construction process flow of suction bucket
1.2 三桶吸力桶基础结构
图2 为三桶吸力桶式基础结构组成,桶式基础是一种顶部封闭、底部开口的钢制大直径圆桶结构,它利用吸力泵组产生负压把桶内水排空,桶内外产生压力差,从而使桶形基础贯入至设计深度。三桶吸力桶由吸力桶、导管架和上部箱梁过渡段3 部分组成。以长乐C49 号机位为例,吸力桶3 个,长度26 m,直径10 m,桶间距离28.966 m(10 MW),导管架为3 腿导管架,长度64.61 m。吸力桶吸入海床锚固整个基础,吸力桶顶部的沉贯自动化设备吸力泵组用于自动控制基础吸力下沉,导管架为中间连接过渡段箱梁与吸力桶的桁架式结构体,过渡段主钢管用于连接风机塔筒的底部基础平台,回收缆绳用于沉贯完成后回收水下吸力泵组。
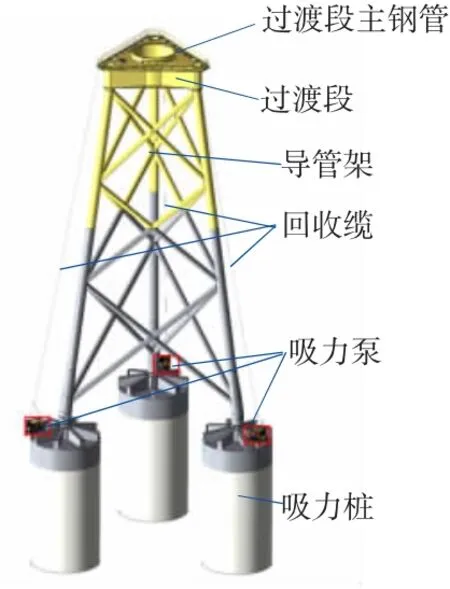
图2 三桶吸力桶式基础结构组成Fig.2 Structural composition of three-bucket suction bucket foundation
2 控制系统硬件组成
2.1 位置姿态监测系统
位置姿态监测系统安装于导管架顶部,主要由GPS 天线、GPS 控制器、24 V 光伏控制器、太阳能板、蓄电池、交换机、双轴倾角传感器、PLC(塔顶)、RS485 串口服务器、警示灯等组成。具体框架图如图3 所示。

图3 导管架位置及姿态测量系统框架Fig.3 Framework of the jacket position and attitude measurement system
太阳能板可对蓄电池进行充电,并通过光伏控制器对导管架顶部系统所用元器件进行供电,确保系统正常工作;RS485 串口服务器对倾角仪的数据进行采集;PLC 对警示灯进行控制;PLC、串口服务器、GPS 控制器通过TCP/IP 通讯协议接入交换机;无线AP 与交换机相连,将数据信号以无线的形式发送至主站部分控制中心进行位置姿态信息处理,为调平控制提供数据基础。其中,倾角仪数据可测量导管架塔顶倾斜状态,得到三桶顶面高差的实时数据;GPS 数据用于下沉施工前导管架定位和判断施工完成后塔顶是否达到设计标高。
2.2 控制系统
控制系统位于集装箱内主站部分,主要由PLC(1500)、上位机、操作面板、交换机、串口服务器和变频器组成,PLC 为该系统的核心,主要功能有:1) 对监测系统传来的姿态位置信息进行处理,呈现于上位机;2) 接收上位机和操作面板的控制信号,处理后发送给水下部分和变频器,操控水泵和阀组的动作。具体框架如图4 所示。

图4 控制系统框架Fig.4 Control system framework
2.3 动作系统
动作系统位于水下,与调平系统相关的硬件主要有:水下交换机、PLC(水下)、1—6 号电磁阀、1 号、2 号水泵及液压泵系统。
观察组治疗总有效率为86.7%,显著高于对照组的63.3%,差异有统计学意义(Z=3.781,P=0.040)。见表1。
水下PLC 接收来自主站PLC 和变频器的信号,对电磁阀和水泵的开关和启停、转速进行控制。通过特定的电磁阀开关组合及水泵转速控制,将桶内海水抽出,使得桶内压力小于桶外压力,吸力桶下沉。
动作系统框架如图5 所示。

图5 动作系统框架Fig.5 Motion system framework
3 下沉调平方法
3.1 下沉调平原理
当吸力桶处于吸力下沉状态时,每桶各有2台变频器通过改变输出频率控制水泵以不同速率抽出桶内水,桶内外产生压力差使得吸力桶向下贯入,因此变频器频率与压差大小成正向相关,频率越大,则产生的压力差越大。下沉过程中需遵循压差/深度控制极限,即在当前深度下不能突破一定的压差值,该值可通过前期计算得到。
3.2 手动下沉调平
根据三桶导管架具体尺寸及结构应力分析结果[5],确定下沉过程中,导管架顶面垂直度不超过5 cm,并以此作为依据设计手动调平流程及方法,具体方法如下:
若三桶顶高差均≤2.5 cm,则3 台水泵同时以相同频率工作,该频率满足可下沉并小于极限;若某一桶与最低桶桶顶高差>2.5 cm 且<5 cm,则增大该桶水泵的频率;若某一桶与最低桶桶顶高差≥5 cm,停止3 台水泵:若其余两桶高差≤1 cm,则单独开启该桶水泵增加频率直到该桶与最低桶高差≤1 cm;若其余两桶高差>1 cm,先单独开启该桶水泵增加频率直到该桶与中间桶高差≤1 cm,再开启该桶与中间桶水泵增加频率直到三桶桶顶高差均≤1 cm。吸力下沉调平策略流程图见图6。

图6 吸力下沉调平策略流程图Fig.6 Flow chart of suction sinking and leveling
3.3 自动下沉调平
图7 为导管架塔顶俯视图,O为导管架塔顶圆心,A'、B'、C'三点为A、B、C三吸力桶顶面圆心,倾角仪安装于导管架塔顶,为双轴倾角仪,其y轴正方向与OA'方向平行。由此可知,若倾角仪y轴读数不为0,则A桶相对于其他两桶发生了倾斜:若读数为正值,则A桶相对于其他两桶位置靠上,数值越大则偏移越大;若读数为负值,则A桶相对于其他两桶位置靠下。若倾角仪x轴读数不为0,则B、C两桶之间发生了倾斜:若读数为正值,则C桶相对于B桶的位置靠上;若读数为负值,则C桶相对于B桶的位置靠下。
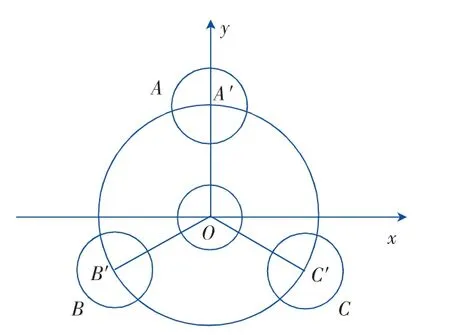
图7 导管架塔顶俯视图Fig.7 Top view of jacket tower
在自动调平时,不应依靠加大位置靠上桶体的变频器频率来加快其下沉速度来达到调平目的,否则可能突破压差控制极限,应减小位置靠下桶体的变频器频率来减缓其下沉速度,等待其他桶体与其达到同一深度后再继续同速下沉。则有:倾角仪y轴为正时,减小B、C两桶变频器频率;倾角仪y轴为负时,减小A桶变频器频率;倾角仪x轴为正时,减小B桶变频器频率;倾角仪y轴为负时,减小C桶变频器频率。
自动调平中变频器的频率控制采取PID 控制中比例控制的方法[6-8]。比例控制是线性的回授控制系统,在比例控制算法中,控制器输出等于误差信号的倍数,误差信号也就是目标值和变数的差,即倾角仪的读数与0°的差值,具体公式如下:u(t)=Kp×err(t)+u0(1)式中:u(t)为比例控制器输出,即变频器频率输出;Kp为比例增益;err(t)为时间t时的瞬时误差,即倾角仪读数;u0为没有误差时的控制器输出,即发生倾斜前变频器的频率。
设3 桶以相同频率开始下沉,根据吸力桶下沉要求及3 桶位置情况,修改后3 桶的比例控制器输出如下:
当errx(t)>0,erry(t)>0 时
当errx(t)<0,erry(t)>0 时
当errx(t)>0,erry(t)<0 时
当errx(t)<0,erry(t)<0 时
式中:uA(t)、uB(t)、uC(t)分别为A、B、C桶的变频器输出频率;errx(t)、erry(t)分别为倾角仪X轴和Y轴的读数。
将修正后控制器输出频率分别输入至3 桶变频器,通过变频器控制水下动作系统中水泵的转速,以此分别控制3 桶内外压差,使3 桶分别以不同速度下沉,以达到调平目的。
4 现场施工操作流程及验证
吸力桶下沉主要分为以下阶段:入水阶段、着泥阶段、自重下沉、吸力下沉、装置回收。
4.1 入水阶段
导管架定位完成后,吊机与绞车协调开始下沉施工,确保线缆始终处于松弛状态。当吸力桶底部接近海平面时,确保1—6 号阀门关闭,在操作台上打开排水/排气阀。导管架继续下沉,当水完全没过设备后,可在操作台上伸出测深机构,压力传感器和测深传感器出现数值。
4.2 着泥阶段
当导管架下沉直至某一桶距离泥面1 m 时,进入着泥阶段。先暂停下放使导管架稳定,稳定后导管架缓慢下沉,吸力桶缓慢入泥,入泥过程中保证塔顶基本垂直。
4.3 自重下沉
当所有桶贯入深度大于1 m 时,结束着泥阶段,进入自重下沉阶段。下沉过程中保持塔顶垂直度没有增大的趋势,与此同时,检查内外压差需接近于0,土体隆起数值没有异常增大,否则,减缓下沉速度。
4.4 吸力下沉
当吊机载荷减小至200 t 时,自重下沉阶段结束,进入负压下沉阶段。在操作台上依次关闭3桶的排水/排气阀,打开2 号阀、4 号阀、5 号阀。若选择手动操作,按4.2 节中手动下沉调平方法进行下沉调平,期间保证塔顶垂直度小于0.2%,即导管架顶面垂直度不超过5 cm,且内外压差小于“沉贯压差极限”;待下沉速率相对稳定后,可选择自动下沉,则系统按4.3 节中自动下沉调平策略下沉。注意,因在自动调平时,依靠减小位置靠下桶体的变频器频率来减缓其下沉速度达到调平目的,若遇到较为坚硬的土层时,可能导致下沉过于缓慢甚至停止,此时需切换回手动模式,在得到上级许可后,同时增大变频器频率将内外压差控制在“最大沉贯所需压差”和“沉贯压差极限”之间,使吸力桶再次下沉,直到突破该土层。
4.5 施工验证
本文中的三桶吸力桶基础专用施工设备及控制系统已运用于长乐外海海上风电项目中。表1为导管架基础施工过程、控制数据和验收测量的数据,由数据分析后可得:基础下沉平均施工时间为8.5 h,下沉效率较高;施工过程中上部导管架结构水平度均控制于1%以内,最终下沉结束后最大水平度偏差为0.28%,平均水平度为0.114%,均满足设计要求;施工过程桶内外压差未突破过压差/深度控制极限,施工安全性好;桶内土体隆起最大高度为278 mm,平均高度为146 mm,下沉结束后上部导管架的标高均满足设计要求。因此,三桶吸力桶基础专用施工设备及控制系统的性能和稳定性在长乐外海海上风电项目中得到了有效验证。

表1 施工数据Table 1 Construction data
5 结语
海上风电吸力桶式基础安装中,对下沉过程中桶体姿态和深度的控制是施工重点与难点。本文针对三桶吸力桶式基础安装施工,对硬件和软件分别进行研发,通过在下沉设备上加装压力传感器、双轴倾角传感器等,快速准确地获得下沉姿态实时反馈;利用PID 控制原理中的比例控制,控制变频器水泵等执行机构动作来完成下沉中的调平控制,在任意时刻保持桶式基础导管架平台的水平状态。
该调平控制系统流程清晰,操作简洁,并引入了自动下沉调平控制,相较手动控制能够对倾角和压差信息的变化做出更快速合理的频率调整,提高了系统的稳定性与可靠性,保证海上风电三桶吸力桶式基础安装的安全性与完成度。
