基于改进花授粉算法的永磁同步电机参数辨识
2024-01-29姜宏昌胡继胜
高 森, 王 康, 姜宏昌, 胡继胜
(大连交通大学 自动化与电气工程学院,辽宁 大连 116028)
0 引言
永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)具有体积小、结构简单以及效率高等诸多优点,在伺服系统及其他工业领域得到广泛应用[1-2]。随着科学技术的发展,对于PMSM及其控制系统的精确性要求日益提高。电机控制系统的设计高度依赖于准确的电机参数。然而,由于制造差异,每台PMSM的参数都会存在一定的不确定性和误差。此外,在运行过程中电机电气参数易受磁饱和、温度等因素的影响,导致电机控制性能下降[3]。因此,为了实现高性能的PMSM控制,准确地辨识电机参数是不可或缺的先决条件。
综合国内外研究现状,传统的辨识方法主要有:扩展卡尔曼滤波[4-5]、模型参考自适应[6-7]以及最小二乘法[8-9]等。扩展卡尔曼滤波算法涉及大量矩阵和矢量运算且需要对电机数学模型进行预处理,实现过程较为复杂;模型参考自适应法收敛速度较慢,且自适应律的设计比较复杂,不具备通用性;最小二乘法需要计算目标函数对电机参数的导数,容易受到测量噪声和电机转速波动的干扰,导致估计结果不稳定。目前学者较多应用智能优化算法,与传统方法相比,其具有效率高、鲁棒性强以及对目标函数要求低等优点。PMSM的工作原理非常复杂,受多种因素影响,难以用简单的方程式准确描述,而智能算法则能更好的拟合复杂的电机模型,提供更准确的电机模型参数估计,以满足高精度要求。因此,在高精度和高复杂性要求下,采用智能算法能够更好地满足实际需求,持续优化参数,提高系统稳定性和可靠性。文献[10]针对标准蛇优化算法辨识PMSM参数时存在迭代后期易陷入局部最优而导致收敛速度慢和辨识精度不高的缺点,提出一种引入混沌映射与准反向学习策略结合柯西变异布谷鸟算法的改进的蛇优化算法,提高了辨识精度和收敛速度,但其设计过程较为复杂。文献[11]提出了一种融合小生境技术的细菌觅食算法以解决群智能算法在PMSM参数辨识问题中易陷入局部最优解的问题,通过多种群协同搜索策略提高了算法的搜索效率和寻优精度,但其收敛速度不够快。文献[12]设计了一种新型动态混合最小均方算法的Adaline神经网络用于解决PMSM多参数辨识问题,辨识精度高,然而该神经网络计算量大,并且需要进行离线训练。文献[13]提出了一种结合自适应正态云模型的樽海鞘群算法进行参数辨识,在樽海鞘追随者位置更新阶段引入自适应正态云模型,且随着迭代的进行自适应调整正态云模型熵值,有效提高了参数辨识的精度,但过程复杂。文献[14]针对传统反向传播(Back Propagation,BP)神经网络全局搜索能力弱和抗干扰能力差的问题,利用改进鲸鱼优化算法对BP神经网络进行了优化,改善了辨识精度和收敛速度,但其参数较多,结构比较复杂。
为了克服上述算法的缺陷,本文提出了一种改进的花授粉算法对PMSM定子电阻Rs、d-q轴电感Ld、Lq和永磁体磁链ψf进行辨识。首先,利用混沌Logistic映射对花朵个体位置进行初始化,使其初始位置分布更加均匀。其次,在全局和局部授粉过程中分别引入t-分布扰动和高斯扰动,以增强搜索空间多样性,提升算法跳出局部最优解的潜力,从而改善了花授粉算法(Flower Pollination Algorithm,FPA)的辨识精度和全局收敛速度。最后利用该算法对PMSM参数进行辨识并通过Matlab/Simulink进行仿真,验证了改进算法的有效性。
1 PMSM数学模型
PMSM具有多变量、非线性以及强耦合等特征[15]。为便于分析,简化问题的复杂度,在同步旋转d-q坐标系下构建理想情况电机数学模型,以实现对象的近似解耦。
PMSM动态电压方程为

(1)
式中:ud、uq、id、iq分别为定子直交轴电压和电流分量;Rs、Ld、Lq、ψf分别为定子电阻、直交轴电感和永磁体磁链;ωe为转子电角速度。
在稳态情况下,PMSM的离散电压方程为

(2)
由于方程的阶数为2,而待辨识参数有Rs、Ld、Lq和ψf4个,此时处于欠秩状态。在这种情况下,可能会导致算法误收敛,并最终导致辨识结果的不确定性。当前解决该欠秩问题的主要方法是在电机稳态运行后,通过瞬时输入负序d轴电流(id≠ 0),以获得满秩的电机d-q轴离散方程[16]:
(3)
式中:下标为0的表示控制模式id=0下的变量和参数;无下标的表示在控制模式id<0下的变量和参数。
2 改进花授粉算法
2.1 标准花授粉算法
花授粉算法(FPA)作为一种新兴的元启发式智能优化算法,最初由剑桥大学学者X. S. Yang提出,因其结构简单,易于实现以及参数少等优势而备受关注,用于解决各类工程优化问题[17-21]。自然界中花植异花授粉和自花授粉的繁衍方式是FPA算法的灵感来源,也是其算法的核心,其基本原理描述如文献[22]所示:
1) 生物异花授粉是执行Levy飞行的全局授粉过程;
2) 非生物自花授粉是随机游走的局部授粉过程;
3) 繁衍概率即为花的恒常性,其取值与两朵花的相似性成正比;
4) 全局授粉和局部授粉的转换通过转换概率p∈[0,1]来控制。
算法的全局授粉和局部授粉分别由式(4)和式(6)实现。通过比较转换概率p与均匀分布随机数rand的大小,来控制全局授粉和局部授粉的转换。当rand>p时,花粉进行全局授粉,否则进行局部授粉。

(4)


(5)
式中:Γ(λ)为标准的gamma函数,λ通常取值为1.5。

(6)

2.2 改进花授粉算法
2.2.1 混沌映射初始化花朵个体位置
优化算法的收敛速度和最终解的精度与种群初始化质量优劣密不可分。传统FPA算法,在种群初始化阶段通常采用随机化的方式,将个体随机分布在搜索空间中。然而,这种随机初始化方式可能导致种群个体位置分布不均匀,易陷入过早收敛的局部最优解。然而,混沌系统具备随机性和对初值敏感等特征,通过引入混沌映射生成花朵个体初始位置,可以提高初始种群的质量,使得种群个体更加均匀地分布于整个搜索空间,以便在全局范围内更高效地找到更优的解决方案。这种改进有助于避免过早收敛,提高其全局搜索能力。利用混沌Logistic映射对种群位置初始化,步骤如下:
1) 首先随机生成一个D维向量b1∈[0,1]。
2) 利用Logistic映射迭代产生其余n-1个向量,计算式如下所示:
bi+1=μbi(1-bi)
(7)
式中:μ为控制参数;bi为经过混沌映射后花朵个体的位置。
3) 将bi映射到解的搜索空间中,如式(8)所示:
xi=L+bi(U-L)
(8)
式中:xi为搜索空间中花朵个体初始位置;U和L分别为搜索空间的上下限。
2.2.2 基于t-分布扰动策略的全局搜索
在进行全局搜索时,传统FPA算法仅靠最优花朵个体当前位置和莱维飞行函数来生成新解,并更新当前花朵个体的位置。然而,这种更新方式仅局限于当前一代的信息和最优位置,无法有效地扩展搜索空间。因此,针对传统FPA算法缺少变异机制,易陷入局部最优解的缺点,引入一种自适应t-分布扰动算子,随机扰动花朵个体。通过引入这种扰动机制,赋予了算法多样性和更强的探索能力,能够有效避免局部最优解,并找到全局优化问题的更优解决方案。改进后的全局搜索位置更新计算如式(9)所示:

(9)
式中:rand为均匀分布在[0,1]区间的随机数;t-disturbance为t-分布扰动算子;m为概率因子,其取值范围为0到1。
随着算法迭代进行,t-分布扰动算子的自由度会动态调整。在算法的初期迭代阶段,t-分布扰动算子呈现出类似柯西分布的特性,这有助于拓展搜索空间,从而提升算法的全局搜索能力。随着算法迭代进行,t-分布扰动算子特征逐渐趋近于高斯分布,有助于在局部邻域内进行搜索,提高算法局部开发能力。在改进的位置更新方程中,采用了两种位置更新策略,通过比较rand与m大小,动态选择更新机制,实现解之间的信息交换,从而有效提升了算法的性能和效率,为解决优化问题提供了更高效的算法策略。
2.2.3 基于高斯扰动策略的局部搜索
算法的全局最优性取决于其是否能够有效地避免陷入局部最优解。为了增强算法跳出局部最优解的潜力,在局部授粉阶段引入高斯扰动策略。通过引入高斯扰动策略,以实现在当前解的邻域内进行搜索,并对解的位置进行随机扰动,让算法获得更强的逃离局部最优解的能力,以便更好地探索整个搜索空间,寻找全局最优解。改进后的局部搜索位置更新计算如式(10)所示:

(10)

在改进的位置更新方程中,通过比较rand与q大小,选择对应的局部授粉策略。这一改进的目的是增强算法脱离局部最优解的能力,能够更有效地探索整个搜索空间,以便寻找全局最优解。这种灵活的策略有助于提升算法的全局搜索性能,使其更有效地解决问题。
3 基于tGFPA的永磁同步电机参数辨识
3.1 永磁同步电机参数辨识原理
对于PMSM参数辨识问题,因其模型已知,所以可以视为寻找最优解的问题。通过比较实际系统输出与可调模型输出之间的差异,并采用逐步优化的方式逼近最小化适应度函数的目标,从而实现对系统真实参数的辨识。基于t-分布扰动和高斯扰动的花授粉(t-Distribution Perturbation and Gauss Perturbation Flower Pollination Algorithm,tGFPA)算法的PMSM参数辨识原理框图如图1所示。

图1 基于tGFPA算法的PMSM参数辨识原理
由图1可见,通过适应度函数对实际模型和理想模型的输出差异进行评估,并通过tGFPA辨识器对辨识参数进行修正。重复上述优化过程直至达到预设要求,从而辨识出系统真实参数。
3.2 适应度函数
根据PMSM状态方程式(1)~(3),将式(11)定义为算法的适应度函数:

(11)
式中:ω1、ω2、ω3和ω4为适应度函数的加权因子,由于四者重要程度相同,因此将它们的权重均设置为0.25。
3.3 tGFPA算法的PMSM参数辨识步骤
在传统FPA算法中引入t-分布扰动和高斯扰动策略,可以使算法更好的应用于PMSM参数辨识问题,具体辨识步骤如下:
步骤1:数据采集
当电机在两种模式下(id=0和id<0)稳态运行时采集相关数据,包括交直轴电压、电流以及转子电角速度,并保存在工作区。
步骤2:参数初始化
设定待辨识参数Rs、Ld、Lq和ψf的范围,并对算法中种群规模、最大迭代次数、转换概率以及概率因子等所需相关参数进行设置。利用混沌映射初始化种群位置,计算每个花朵个体的适应度值,求解出当前的全局最优值。
步骤3:授粉模式决策
生成随机数rand,通过比较rand与转换概率p的大小,选择相应的授粉模式。若rand>p,算法进入全局搜索,根据式(9)动态选择更新机制进行位置更新。反之,算法进入局部搜索,按式(10)进行位置更新。
步骤4:适应度评估
针对每个花朵个体,重新计算其适应度值,并根据适应度值判断是否用新解替代原解。如果根据新解计算出的个体适应度值精度更高,则接受新解并基于新解计算新的适应度值。如果根据新解得到的适应度值优于全局最优值,则更新全局最优解和全局最优值。
步骤5:终止条件判定
评估是否达到预设要求,若是达到预定的最大迭代次数或足够接近最优解的阈值,则终止条件,转到步骤7;否则,继续下一步。
步骤6:迭代
回到步骤3,继续进行位置更新、适应度评估以及最优解更新等步骤。
步骤7:输出结果
当满足终止条件时,输出整个花朵群体的全局最优解作为最终的参数辨识结果。
基于tGFPA算法的PMSM参数辨识流程如图2所示。

图2 基于tGFPA算法的PMSM参数辨识流程
4 仿真验证和结果分析
4.1 仿真设置
为了实现参数辨识系统对电机驱动系统输入信息的获取,需要对其数据进行采样,包括交直轴电压、电流分量以及电角速度。本试验在Matlab/Simulink平台上搭建基于tGFPA算法的PMSM参数辨识仿真模型,如图3所示。

图3 基于tGFPA算法的PMSM参数辨识仿框图
在仿真试验中,电机运行工况设置为:电机负载转矩为10 N·m,转速为1000 r/min。采用基于id= 0的矢量控制,当电机稳定运行时注入id=-2的d轴负序电流,进行电机信息采样,并将数据保存在Matlab的工作区中。更多的数据点有助于提高算法的收敛性和准确性,但是会导致收敛速度变慢,为了兼顾辨识精度和速度,保存的数据样本为4 000组。为了使结果更具科学性,将tGFPA算法与标准花授粉算法(FPA)、惯性权重线性变化的粒子群(Linearly Particle Swarm Optimization,LPSO)算法以及自适应粒子群(Adaptive Particle Swarm Optimization,APSO)算法进行了对比。为了确保仿真分析的合理性,将粒子个数全部设置为50,迭代次数设置为300。为了避免单次运行的偶然性对测试误差的影响,所有仿真试验独立运行50次,取其平均值作为最终结果,以提高仿真结果的稳定性和可靠性。仿真系统中PMSM参数见表1。

表1 仿真系统中PMSM参数
4.2 仿真结果分析
采用上述所提算法对PMSM参数进行辨识,辨识结果如表2所示。

表2 不同算法的PMSM参数辨识结果
由表2可知,采用tGFPA算法对PMSM参数进行辨识时,误差普遍较小,体现了其在跳出局部最优解和提高辨识精度方面的出色表现。相比其他算法,tGFPA算法在全局搜索和局部优化方面的能力更强,在参数辨识任务中表现更优。这表明tGFPA算法对于解决PMSM参数辨识问题具有良好的性能和可靠性。
图4为各参数在4种算法下的适应度值收敛曲线。由图4可知,tGFPA算法收敛速度最快,相对于其他三种算法,其在较少的迭代次数内即能获取相对优质的解。这表明tGFPA算法相较于其他算法具有更快的收敛速度和更高的效率。

图4 PMSM各参数辨识适应度收敛曲线
由于PMSM数学模型具有非线性特性,其参数辨识问题呈现出非凸特性,存在多个局部最优解。在这种情况下,优化算法可能会在全局最优解附近振荡,导致适应度曲线快速收敛到一个较低的值,但模型参数仍然在不同的局部最优解之间波动。
图5为在tGFPA算法下,定子电阻Rs、直轴电感Ld、交轴电感Lq和永磁体磁链ψf的收敛过程。

图5 PMSM各参数辨识收敛过程
由图5可知,在tGFPA算法下,PMSM各参数辨识结果表现出较高的精度,接近于真实值。这表明tGFPA算法在PMSM参数辨识问题上具有显著的优势,并表现出良好的收敛性能,为PMSM参数辨识提供了一种可靠且有效的解决方案。
5 结语
本文在FPA算法的基础上进行了改进,提出了一种基于t-分布扰动和高斯扰动相结合的双扰动策略的改进花授粉算法。首先,在个体位置初始化阶段,使用混沌Logistic映射来确保花朵初始位置的分布更加均匀。其次,为了提高搜索空间的多样性,在全局授粉过程中引入t-分布扰动。与此同时,在局部授粉过程中引入高斯扰动,以增强算法跳出局部最优解的能力。将改进的算法应用于PMSM的电气参数辨识,仿真结果表明,tGFPA算法在处理PMSM参数辨识问题时,表现出更高的辨识精度和更快的收敛速度,具有明显的优势。
Parameters Identification of PMSM Based on Improved Flower Pollination Algorithm
GAO Sen, WANG Kang, JIANG Hongchang, HU Jisheng*
(College of Automation and Electrical Engineering, Dalian Jiaotong University, Dalian 116028, China)
Keywords: permanent magnet synchronous motor; parameter identification; improved flower pollination algorithm; t-distribution perturbation; Gaussian perturbation
Permanent magnet synchronous motor (PMSM) has many advantages such as small size, simple structure, and high efficiency, making it is widely used in servo systems and other industrial fields. However, with the continuous progress of science and technology, the requirements for its control accuracy are increasing. Due to the close correlation between the control performance of permanent magnet synchronous motors and the accuracy of motor electrical parameters, the accurate identification of motor parameters is an indispensable prerequisite for achieving high-performance control of permanent magnet synchronous motors.
In view of the defects that traditional flower pollination algorithm are prone to fall into local optimization at the later stage of parameter iteration for identifying permanent magnet synchronous motor, which leads to slow rate of convergence speed and low optimization accuracy, an improved flower pollination algorithm (tGFPA) combining t-distribution perturbation and Gaussian perturbation strategy is proposed to achieve high-precision identification of permanent magnet synchronous motor parameters. Firstly, chaotic logistic mapping is used to initialize the position of flower individuals, thereby making the distribution of population individuals more uniform throughout the entire search space and improving the quality of the initial population. Secondly, a t-distribution perturbation strategy is introduced in the global pollination process to randomly perturb individual flowers, improving the diversity of the search space. During the local pollination process, a Gaussian perturbation strategy is used to search within the neighborhood of the current solution, enhancing the algorithm’s ability to jump out of the local optimal solution.
Finally, a permanent magnet synchronous motor parameter identification simulation model based on tGFPA algorithm is established on the Matlab/Simulink platform verified the effectiveness and accuracy of the proposed algorithm. The simulation model for parameter identification of permanent magnet synchronous motor based on tGFPA algorithm is shown in Fig.1.
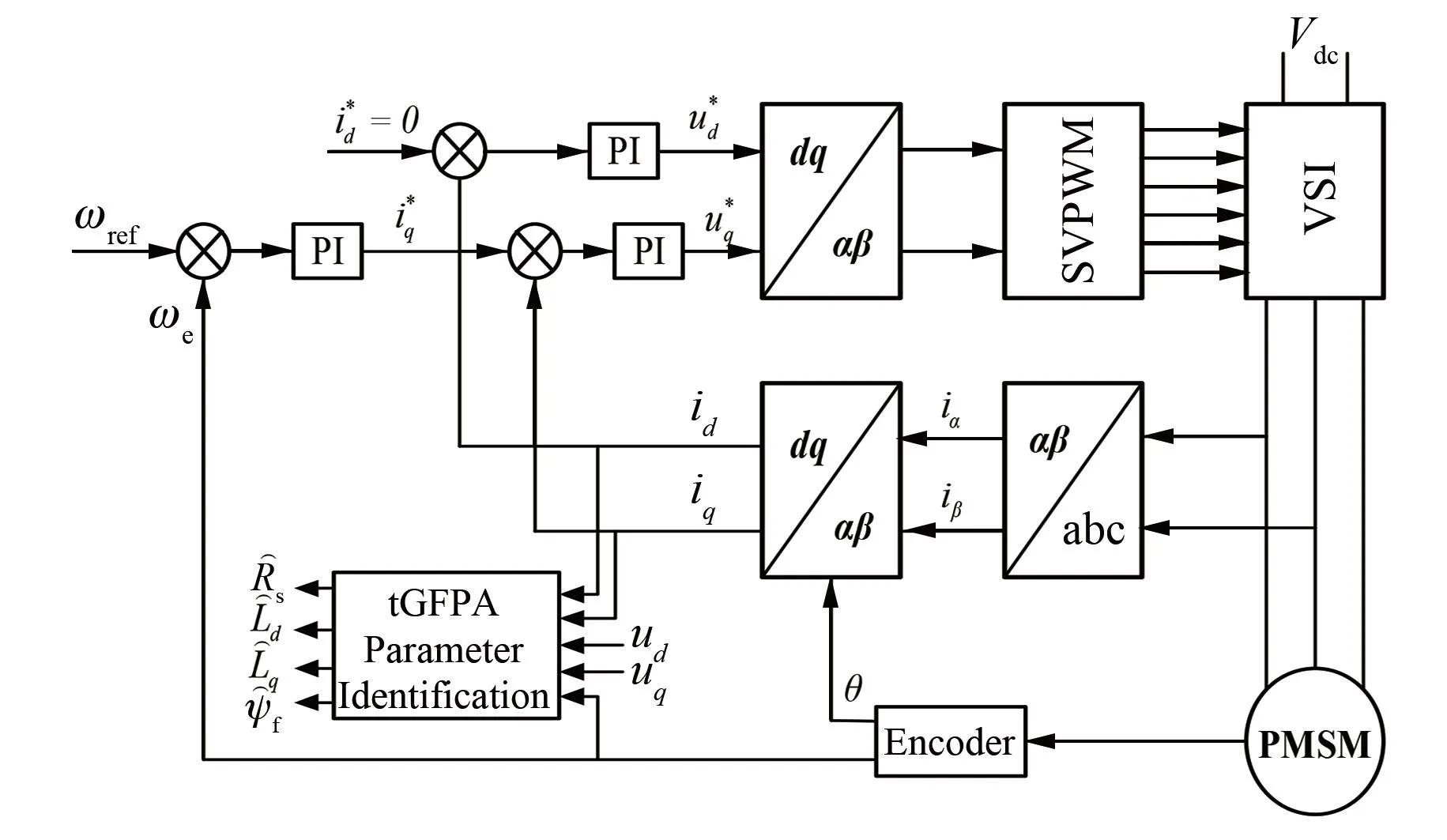
Fig.1 Block diagram of simulation model for parameter identification of permanent magnet synchronous motor based on tGFPA algorithm
The simulation results show that the proposed flower pollination algorithm based on the double perturbation strategy of t-distribution perturbation and Gaussian perturbation shows significant advantages in dealing with the parameter identification problem of permanent magnet synchronous motor, and has faster rate of convergence and higher identification accuracy. To sum up, this provides an effective and feasible solution for improving the control performance of permanent magnet synchronous motors.
