永磁同步电机无位置传感器控制技术综述
2024-01-29张国强杜锦华
张国强, 杜锦华
(西安交通大学 电气工程学院,陕西 西安 710049)
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)具有转矩密度大、动态性能快以及可靠性高等竞争优势,已被广泛应用于工业生产、航空航天及家电等领域[1]。PMSM矢量控制实现的关键是准确地获取转子位置信息,传统的角度检测方法是在电机轴上安装旋转变压器或光电编码器,通过位置传感器获取位置信息。然而,位置传感器的存在不仅增加了电机驱动系统的体积和制造成本,而且降低了驱动系统的可靠性。
此外,位置传感器的寿命和可靠性与电机的工作环境有关,高温或电磁噪声干扰严重的场合都会导致位置传感器无法正常工作。位置传感器安装过程中的人为安装误差以及电机运行过程中的碰撞等因素也有可能导致编码器损坏失效。一旦位置传感器出现故障,系统便无法获得准确的闭环反馈量,将导致系统调节功能丧失,整个系统将处于失控状态,严重情况下会使电机失速[2]。以工业生产中的页岩油开采为例,电机需要在高温高压工况下工作,同时还需要应对炸药爆炸带来的冲击,对电机转子位置检测的可靠性要求很高,一旦位置信号错误,将会导致电机失控,造成严重的经济损失。因此,为解决位置传感器存在的问题,提高电机的控制性能,许多国内外学者考虑在不使用传感器的基础上,研究无位置传感器控制技术来实现电机正常运行的矢量控制。
根据电机运行的速度范围,可以将永磁同步电机无传感器控制策略分为三大类:(1)适用于零低速域的控制策略;(2)适用于中高速域的控制策略;(3)适用于全速域运行的复合控制策略。
电机在零低速域运行时,与电机转速或位置信息相关的物理量,如磁链、反电动势等幅值非常小,信号的信噪比很低,无法有效提取,通常采用开环起动法和高频信号注入法控制策略[2-3]。
中高速域运行时,大多基于电机模型来估算,依赖于电机的基波数学模型,通过各种算法对电机数学模型进行处理,获得与电机转速或转子位置角有关的物理量,再从中提取转子位置信息。主要有磁链估计法、滑模观测器(Sliding Mode Observer,SMO)算法[4]、扩展卡尔曼滤波器算法[5]、模型参考自适应(Model Reference Adaptive Systems,MRAS)法[6]、龙贝格观测器[7]等。另外,随着人工智能控制技术的不断发展,不少学者提出将智能控制算法应用到电机的无位置传感器控制中,并取得了丰富的成果。
随着电机无位置传感器控制技术的不断成熟,其已逐渐投入实际生产应用中。本文对永磁电机无位置传感器控制技术在零低速域、中高速域和全速域复合运行三个方面的不同控制算法进行了介绍,并对比分析了不同控制方法的优缺点。
1 零低速域运行控制
永磁同步电机工作在零低速域时,由于反电动势幅值非常小、信噪比严重恶化、控制效果差,难以通过电机模型准确地获取位置信息[8]。因此可以采用开环法实现永磁同步电机的运行,开环法算法简单、易于实现且成本低。常见的有开环电压频比(V/F)控制技术和闭环电流频比(I/F)控制技术两种方法[9-10]。但对于电机起动性能要求较高的场合,如要求电机重载起动和急停,则需要采用闭环控制来实现对电机转子位置的检测。通常采用注入额外的信号激励,利用电机凸极特性实现对转子位置的辨识。根据注入信号形式的不同,高频注入法分为旋转高频注入法和脉振高频注入法[11]。
1.1 V/F控制
V/F控制技术能保证电机磁通Φm不变,通过改变电压频率,进而对电机进行调速,其控制结构框图如图1所示。当反电势足够大时,电机定子电阻上的电压降可以忽略,相电压大致等于相感应电动势,相感应电动势与电流频率成比例,即:
E≈Us= 4.44fNsKΦm
(1)

(2)
式中:f为定子电流频率;Ns为定子每相绕组串联匝数;K为定子绕组系数;Φm为每极气隙磁通量;E为相感应反动势;Us为相电压。

图1 PMSM的V/F控制结构框图
开环V/F控制不依赖电机参数,控制结构简单且成本较低,适用于表贴式永磁同步电机(Surface-Mounted Permanent Magnet Synchronous Motors,SPMSM)和内置式永磁同步电机(Inner-Mounted Permanent Magnet Synchronous Motors,IPMSM)。但实际控制中,V/F曲线一般是通过离线试验设定的,导致电机在瞬时负载过冲工况下,会出现电流振荡、电机失步或停转等问题。针对上述问题,目前的解决方案是利用电机反电动势或结合观测器实现对V/F控制的补偿。文献[12]在传统V/F控制的基础上提出了E/F控制方法,将电机反电动势信息应用于起动过程,从而有效抑制电流振荡,并且该方法不需要坐标变换来解耦电流,可以有效简化电机起动算法和控制。文献[13]提出一种混合V/F控制方法,针对电机在轻负载下损耗大、速度和扭矩振荡的缺点,结合非线性速度观测器和磁通量观测器估计的速度和扭矩来补偿V/F控制,从而提高控制性能。
1.2 I/F控制
相比于V/F控制,I/F控制结构具有电流闭环调节器,能够解决V/F控制中电流不受控的问题。I/F控制的基本思想是利用电机的“转矩-功角自平衡”特性,如式(3)所示。通过保持电流闭环来保证电流稳定,直接控制转矩电流,转子位置通过积分给定的电流频率获得,在避免电流过大的同时,提高了电机的输出转矩能力。其控制结构框图如图2所示[14]。

(3)


图2 PMSM的I/F控制结构框图
I/F控制下的起动过程主要分为三个阶段:预定位阶段、匀加速阶段和达到指定速度后的恒速运行阶段[15],控制过程如图3所示。当电磁转矩与负载转矩平衡时,PMSM将以给定的速度和恒定的θL稳定运行。如果外部环境导致负载转矩大于电磁转矩,则电机速度将降低,角度θL将变小,根据图3和式(3),电磁转矩将增加,使转子加速直到系统达到新的平衡。当负载转矩减小时,类似的自稳定机制也将起作用。I/F控制的优势在于在电流闭环的约束下,实际电流会随着给定电流的变化而变化,因此也能避免系统过流。

图3 I/F控制过程
文献[16]针对电机在低速运行时,反电动势几乎为零因此无法用来估算电机位置的问题,把I/F控制方法用于电机的起动和速度斜坡上升阶段,为电机提供了一种简单、稳定且低成本的起动方法。文献[17]提出一种带补偿环路的I/F起动方法,在电机运行到一定转速后,使用电流幅值补偿环路,将电流矢量移动到q轴,并在负载变化时保持电流不变,从而抑制负载扰动,实现电机向中高速的平稳过渡。I/F控制虽解决了V/F控制中电流不受控制的问题,但本质上还是开环控制,存在稳定性差导致电机失步的缺陷,因此仅适用于对电机起动性能要求不高的场合。当无位置传感器应用于低速重载伺服系统中时,需采用高频注入的方法来满足无位置传感器的控制要求。
1.3 高频旋转电压信号注入法
高频旋转电压信号注入法是通过往两相静止α-β坐标系中注入两相正交电压信号,激励出因转子凸极导致的高频电流响应,再通过滤波器对电流信号解耦得到转子的位置信息。假定在两相静止坐标系下注入的高频电压频率为ωi,幅值为Vi,则注入的信号可表示为

(4)
高频旋转电压信号注入法实现框图如图4所示。该方法将高频信号直接注入到两相静止坐标,不需要提前估计转子位置,因此该方法具有很好的稳定性。然而高频旋转注入法对电机转子凸极特性具有较强的依赖性,在转子位置信息的提取过程中,多个滤波器的使用降低了系统带宽和动态性能,同时产生的相位延迟会导致估算精度降低。而且该方法容易受到系统延时以及逆变器非线性等非理想因素的影响。

图4 高频旋转电压信号注入法实现框图
为此,文献[18]针对高频旋转注入法在转子位置解调中使用滤波器导致的估算误差,提出利用正序电流分量进行在线补偿的方法,提高了位置估计精度。文献[19]提出了一种基于自注入谐波信号的估算方法,此方法不需要额外注入高频信号,消除低通滤波器(Low-Pass Filter, LPF)对估算位置的影响,从而提高转子位置估算的精度。文献[20]为了减轻起动过程中高频电压注入带来的噪声,同时保证足够的信噪比和带宽,采用多频注入策略,用电流幅值位置解调方法代替传统的相位解调方法,通过离散傅里叶变换计算得到的三相高频电流幅值来检测转子扇区。无需参数调整,只需在注射周期的一半内即可获得初始位置。
1.4 高频脉振电压信号注入法
高频脉振电压信号注入法是在估计的同步旋转坐标系的d轴上注入高频余弦电压信号,如式(5)所示。然后采用低通和带通滤波器提取出包含转子位置信息的电流信号,经过处理得到转子位置的估算值,其实现框图如图5所示。相比于高频旋转电压信号注入法,高频脉振电压信号注入法结构简单,受逆变器非线性的影响小,对电机转子的凸极结构依赖程度低[21]。

(5)
高频注入法可以在静止状态下辨识转子的位置信息,但由于其在信号的解调过程中使用了LPF,可能面临收敛时间长以及系统稳定性有限的问题。文献[22]通过使用高频正序和负序电流来提高包含位置信息的电流信号的利用率,从而提高馈送到转子位置观测器的位置误差信号的信噪比(Signal to Noise Ratio,SNR), 并且消除了由系统延迟引起的电流直流偏置分量。文献[23]提出了一种直接信号解调方法来代替传统的同步信号解调方法,解决了位置估计过程中的LPF问题,同时利用递归离散傅里叶变换(Recursive Discrete Fourier Transform,RDFT)的幅度归一化技术,减小注入信号和电机参数的影响。文献[24]提出将二阶广义积分器(Second Order Generalized Integrator,SOGI)和陷波滤波结合起来形成改进的广义二阶积分器来代替带通滤波器,不仅增强了其谐波衰减能力,而且扩大了位置观测器的闭环带宽。文献[25]从控制器方面入手,利用模型预测控制代替速度环比例积分(Proportional-Integral,PI)控制,降低了滤波器带来的相位滞后影响。
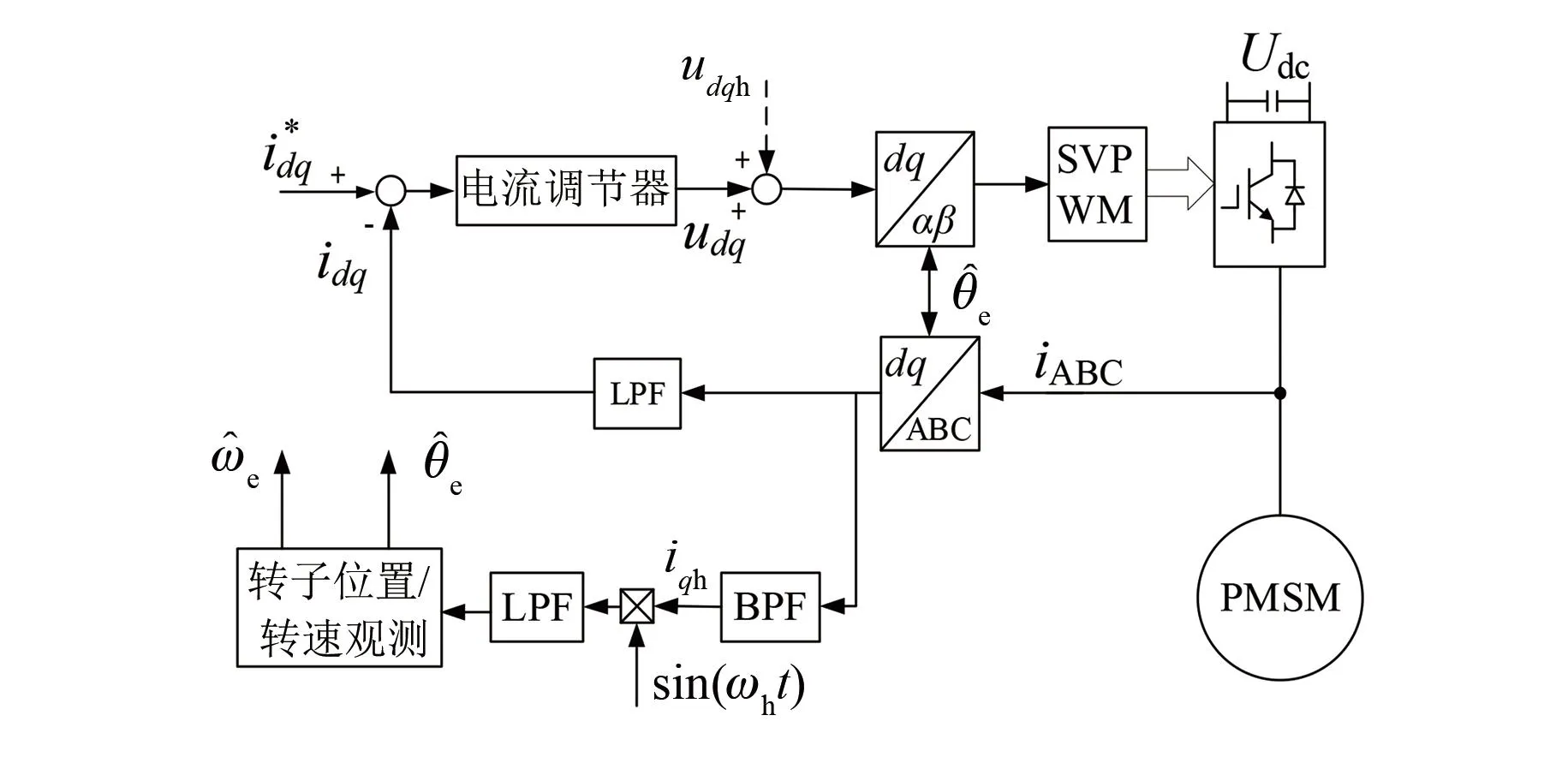
图5 高频脉振电压信号注入法实现框图
上述4种零低速域无位置传感器控制方法的优缺点对比如表1所示。

表1 零低速域无位置传感器控制方法优缺点对比
2 中高速域运行控制
永磁同步电机中高速域运行时,随着电机转速的升高,反电动势检测变得容易,根据电机的基波模型就能估计转子位置。这一类算法包括磁链估计法和各种基于观测器的算法以及一些人工智能控制算法[26]。
2.1 磁链估计法
磁链估计法是基于定子坐标系下的电压方程,通过测量电机的相电压、电流,结合电感和定子电阻等参数信息,积分得到磁链信息,最后通过反正切函数直接计算出转子位置信息的方法,其计算过程如式(6)和(7)所示。该算法实现的关键是获得一个准确的转子磁链矢量,并利用其来推导出转子位置信息。磁链估计法的基本框图如图6所示。

(6)

(7)

图6 磁链估计法的系统框图
式中:ψs为定子绕组磁链矢量;ψf为永磁体磁链矢量;us为定子电压矢量;Is为定子电流矢量;Lαβ为绕组电感;Rs为绕组电阻;ψfα和ψfβ分别为ψf在α和β轴的分量;θe为转子位置角。
磁链估计法具有计算速度快,过程简单直接,实现简单等优点。但是比较依赖电机参数,且包含纯积分环节,会导致估算的磁链精度降低。针对这一问题,文献[27]在传统磁链估计法的基础上,提出利用一阶惯性滤波器来滤除积分偏移,并通过锁相环(Phase-Locked Loop,PLL)来消除由转矩脉动引起的转子位置和转速波动,提高系统稳定性。文献[28]利用电机转子磁链和定子电流构建了一种转子磁链滑模观测器,并借助锁相环对转子位置和转速进行进一步估算,避免引入反正切函数和微分运算带来的位置估算不精确问题。
2.2 滑模观测器算法
滑模观测器(SMO)算法是基于滑模变结构控制理论,其特点在于对非线性系统的处理能力能适应系统自身参数的变化[29]。在PMSM矢量控制系统中,转子位置信息与电机反电动势相关,滑模观测器的设计思路是通过电机定子电流与电压信号作为观测器的输入,利用检测到的实际电流和估算电流之间的误差构建一个滑模切换面s(x),当估算电流和实际电流的偏差为零时,通过开关函数进行高频切换,保证系统能够稳定在滑模面上。传统滑模观测器中的切换函数为开关函数sign(·),构建的α-β坐标系下的电流滑模观测器为

(8)


图7 基于SMO的转子位置估计框图
基于SMO的转子位置和速度估计框图如图7所示。SMO设计响应快、算法简单易实现且对电机参数具有鲁棒性,受外界干扰因素小。但由于SMO在构建过程中使用了不连续开关函数,因此在控制过程中存在抖振现象。为了尽可能地减弱SMO抖振现象对控制性能的影响,国内外研究人员提出了多种方法。文献[29-31]对滑模观测器中使用的开关函数进行了改进,替换开关函数以降低抖振;另外还可以通过采用高阶滑模或利用锁相环来抑制SMO抖振现象。文献[32]提出了一种用于SPMSM位置估计的高阶终端SMO,设计终端滑动模面,实现状态变量的有限时间收敛,并采用高阶滑模控制律实现抖振抑制。文献[33]提出了一种基于高阶超扭曲观测器(Higher-Order Super-Twisted Observer,HOSTO)的非奇异快速终端滑模(Non-Exotic Fast Terminal Slide Mold,NFTSM)控制策略,以获得永磁直线同步电机位置调节快速、精确的跟踪性能。文献[34]通过超扭曲滑模观测器获取转子位置信息,基于内模控制原理引入二阶广义积分器,在保证估算扩展反电动势准确性的同时又能够有效抑制抖振。
2.3 模型参考自适应法
模型参考自适应(MRAS)法由电机的参考模型、可调模型和自适应规则组成[35]。在PMSM无位置传感器控制中,将确定参数的电机本体设为参考模型,电机基本数学模型设为可调模型,通过适当的自适应规则算法调整可调模型和参考模型之间的误差,进而获得电机的位置信息[36]。由于控制过程与转子的凸极性无关,因此该方法既适用于SPMSM,也适用于IPMSM。MRAS的电机模型如式(9)所示,基于MRAS的转子位置估计框图如图8所示。

(9)

图8 基于MRAS的转子位置估计框图
MRAS法易于实施,在中高速范围内表现良好。但是在某些情况下,电机出厂时铭牌提供的PMSM参数存在错误,并且电机参数可能会因长期运行过程中的高温和退磁而发生变化。这种参数的不准确性导致实际永磁同步电机模型与MRAS中使用的数学模型之间存在偏差,从而影响转子位置估计[37]。
由于对参数变化的敏感性,MRAS法在使用过程中受到限制。文献[38]在传统MRAS方法的基础上,在参数部分增加了参数识别模块,提高了系统的精度和稳定性。文献[39]利用灰狼优化(Gray Wolf Optimization,GWO)算法对MRAS得到的速度自适应律的PI控制器参数进行优化,提高了无传感器控制系统的性能。文献[40]提出基于电磁转矩的MRAS转子速度估计器,提高了低速区域和机器参数不确定期间的速度和位置估计性能。文献[41]提出一种基于模型参考自适应系统的多参数估计方法,用于降低PMSM中参数变化对无位置传感器控制性能的影响。
2.4 扩展卡尔曼滤波器算法
扩展卡尔曼滤波器(Extend Kalman Filter,EKF)算法是在卡尔曼滤波的基础上,利用含噪声的信号对永磁同步电机的动态系统进行实时观测的一种非线性的估算方法[42]。其主要思想是利用测量值校正状态变量的预估值,得到其最优滤波估计,即最优滤波估计=预测值+校正值。扩展卡尔曼滤波器实现电机无位置传感器控制的结构框图如图9所示。

图9 扩展卡尔曼滤波器算法实现框图
扩展卡尔曼滤波器算法本质上是一种递推算法,利用已知可以测量的信号,通过软件编程的方式,实现电机转子位置的估算。与其他无位置传感器控制方法相比,扩展卡尔曼滤波器算法能够有效地削弱干扰和噪声,抗干扰能力强,便于数字化。但该方法的计算过程较为复杂,需要进行大量的矩阵计算,对电机参数敏感,因此其应用受到限制。
文献[43]采用现场可编程门阵列(Field-Programmable Gate Array,FPGA)+数字信号处理(Digital Signal Processing,DSP)实现扩展卡尔曼滤波器算法在电机无位置传感器控制中的应用。文献[44]在扩展卡尔曼滤波器算法的基础上采用自适应协方差预测,去除了EKF中的原始协方差检查,从而减轻了计算负担。文献[45]提出基于FPGA的并行降阶EKF算法,实现了电机转子位置信息的估算,提高了控制算法的执行速度,减少了芯片中使用的逻辑元件。
2.5 龙贝格观测器算法
龙贝格观测器是状态观测器的一种,基于系统模型,利用可测量的输入变量和输出变量来重构不能直接测量的状态并进行状态反馈,通过配置极点来控制系统的收敛速度和稳定性。在PMSM无位置传感器控制中,龙贝格观测器基于电机的数学模型,以观测的电压uαβ和电流iαβ作为输入状态变量,通过修正积分算法来消除积分引起的误差,从而获得估计的反电动势量,实现电角度和速度的观测[46]。其算法实现框图如图10所示。

图10 龙贝格观测器算法实现框图
由于龙贝格观测器是基于电机数学模型构建的状态观测器,对电机参数的依赖性较大。文献[47]针对电机参数在实际运行中的变化对观测器性能的影响,在电感L、磁通ψ已知,定子电阻R未知的永磁同步电机的转子位置估计条件下,利用龙贝格观测器对其动态部分和静态部分的结果进行优化处理。文献[48]提出了一种静止坐标系下离散域龙贝格观测器设计方法,通过离散域极点直线平移法设计增益矩阵保证了观测器稳定且具有较快的收敛速度,实现在低载波条件下的稳定运行。
2.6 人工智能算法
人工智能算法,在过去几年得到了长足发展,随着人工智能的兴起,将智能控制用于估计电机转子位置和转速,引起了学者的广泛关注[49]。
文献[50]将基于机器学习的神经网络算法用来获取相电流和电压以及与转子位置相关联的数据集。文献[51]通过自适应线性神经网络滤波器来滤除扩展反电动势中6k± 1次谐波。文献[52]构建了基于改进的反向传播神经网络算法的开关磁阻电机的转子位置模型,实现其转子位置信息的估算。文献[53]提出利用BP神经网络算法对基于MRAS的无位置传感器控制算法进行改进,通过BP神经网络设计自适应律,输出辨识转速,实现电机的位置估算。
上述6种中高速无位置传感器控制方法的优缺点对比如表2所示。

表2 中高速无位置传感器控制方法优缺点对比
3 全速域运行控制
从上述控制方法可以看出,目前还没有一种单一的无位置传感器控制策略能够实现电机从零低速域起动到中高速域的全速域运行控制。另外,通过对电机在不同转速域运行范围下的控制方法的优缺点对比可知,不同控制策略在不同的应用场合有着各自的优异性能。同时考虑到电机处于静止状态和运动状态的位置辨识方法完全不同,目前工程上实现电机无位置传感器全速域控制的主要思路是将零低速域和中高速域的不同控制策略进行组合,根据不同的转速切换策略以实现电机的全速域运行。永磁电机全速域运行下的复合控制结构框图如图11所示。

图11 电机全速域运行下复合控制结构框图
3.1 基于I/F控制的复合控制算法
文献[54-55]提出了I/F控制与SMO控制相结合的复合控制算法。在电机低速域,采用I/F控制,中高速域采用SMO控制,并通过设计适当的过渡状态实现两种控制策略的平滑过渡。
文献[56]将I/F控制与磁链法相结合,并在电机加减速过程中,设置基于滞环切换的转速过渡区,实现电机全速域稳定平滑运行。文献[57]通过应用二次扩展反电动势(Quadratic Extended Back Electromotive Force,QBEMF)模型,将基于注入和基于模型的位置估计算法组合成全速运行的通用无传感器控制策略,通过通用估计器估计转子位置,实现速度无缝转换和全速域无传感器运行。
3.2 切换方式
3.2.1 加权系数切换法
加权系数切换法的基本原理是:当转子速度高于切换区间的上限时,采用中高速的无位置传感器控制方法进行控制;当速度低于切换区间的下限时,采用零低速的无位置传感器控制方法进行控制;当估计速度在切换区间内时,采用两种算法结果的加权值来保证两种方法的平滑切换。同时,切换区的下限速度应高于控制算法在中高速下运行的最低速度,而切换区的上限速度应低于控制算法在零低速下起动的最高速度。为了保证开关区的位置和速度信号不发生跳跃,要求两种方法在开关区的速度和位置误差基本相同。其系统结构框图如图12所示。

图12 加权系数切换法系统结构框图
文献[58]在零低速域采用脉振高频电压信号注入法以实现电机快速起动;在过渡区采用加权平均值复合控制以实现由低速区向中高速区的平滑切换;中高速域采用模型参考自适应算法。确保电机在全速范围内准确识别转速和转子位置,减小转矩脉动并且提升电机的带载能力和低速性能。
3.2.2 滞环开关切换法
滞环开关法的切换策略如图13所示。转速1和转速2分别为过渡区的下限和上限转速,当速度上升到一定时,在一定的时间内,估计位置从零低速时的无位置传感器估计算法快速切换到中高速时的无位置传感器估计算法。

图13 滞环开关切换法系统结构框图
文献[59]在低速阶段采用脉振高频注入法;中高速阶段采用滑模状态观测器,设计滞环平滑切换策略,以实现电机全速域无位置传感器运行,并设计扩张状态观测器(Extended State Observer,ESO)来实现对负载转矩的估算和补偿。
4 结语
永磁同步电机无位置传感器控制的主要作用是实现电机转子位置的检测和估算。零低速域下的无位置传感器控制方法目前还是以高频注入为主,通过借助电机的凸极效应实现转子位置的估算;中高速域下,控制主要依靠电机基波模型的性质,借助各种观测器实现转子位子的估算;全速域下主要采用复合控制技术实现电机转子位置的估算,其难点是如何保证转速过渡区的平滑切换。
综上所述,根据永磁同步电机不同转速下的无位置传感器控制策略,未来可能有以下发展趋势:
(1) 永磁同步电机的零速带载起动问题一直是无位置传感器控制的难点,当电机处于重载起动工作状态时,电机受到铁心饱和以及交叉耦合现象的影响,转子凸极性减弱,高频注入法对转子位置估计的效果变差。因此如何改善高频注入法对电机的位置辨识是一个研究方向。
(2) 针对电机在超高速运行工况下,受功率开关器件开关频率以及成本的限制,实现低载波比控制下的电机位置信息的精确估算,是未来无位置传感器控制的一个研究方向。
(3) 针对电机全速域无位置传感器复合控制算法,如何确保电机在静止和运动状态的控制策略切换时平稳运行也是未来无位置传感器控制的一个研究方向。
Review of Position Sensorless Control Technology for Permanent Magnet Synchronous Motors
ZHANG Guoqiang, DU Jinhua*
(School of Electrical Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
Keywords: permanent magnet synchronous motor; rotor position information; position sensorless; full-speed domain operation
Position sensorless motor drives have attracted increasing attention in academia and industrial applications due to their advantages of low cost, high reliability, simple hardware circuits, and low maintenance requirements. It is important to study the high performance PMSM position sensorless control system with low audible noise, high control accuracy and wide speed range. With the continuous maturity of motor position sensorless control technology, it has been gradually put into practical production applications.
When the permanent magnet synchronous motor works in the zero-low speed domain, the amplitude of the reverse electromotive force is very small, the signal-to-noise ratio is seriously deteriorated, the control effect is poor, and it is difficult to accurately obtain the position information through the motor model. Generally, the high-frequency signal injection method is adopted, and the injected high-frequency voltage signal generates a high-frequency current signal with the same frequency. Based on the convex polarity of the motor, the high-frequency current signal contains the position information of the rotor, and the rotor′s position information can be obtained through a series of signal analysis and processing, such as filtering, rotary transformation, and vector fork multiplication of the current signal. Additionally, open-loopV/ForI/Fcontrol can be adopted to achieve the motor rotor position estimation.
As the motor speed increases, the amplitude of the motor fundamental wave increases, the detection of the reverse electromotive force becomes easy, and the rotor position can be estimated based on the motor fundamental wave model. When the motor works in the medium-high speed domain, the mathematical model of the motor is processed by various algorithms to obtain the physical quantities related to the motor speed or rotor position angle, and then the rotor position information can be extracted from it. Such algorithms include the magnetic chain estimation method, the extended Kalman filter, the sliding mode observer, the model reference adaptive, the Luenberger observer, and some artificial intelligence control algorithms.
For the full-speed domain operation of the motor, the composite control technique is mainly used to realize the estimation of the rotor position of the motor, and the difficulty is how to ensure the smooth switching of the speed transition zone.
In this paper, different control algorithms for permanent magnet motor position sensorless control technology in three aspects of zero-low speed domain, medium-high speed domain and full-speed domain composite operation are introduced, as shown in Fig.1. The advantages and disadvantages of different control methods are also compared and analyzed. Finally, the future development trend of position sensorless control technology for permanent magnet synchronous motor is prospected, and the key problems of follow-up research are pointed out.

Fig.1 Block diagram of composite control structure under full speed domain operation of motor
