电动飞机电推进用永磁同步电机无传感器控制技术综述
2024-01-29米彦青邹成智
米彦青, 袁 兵, 邹成智
(1.天津内燃机研究所,天津 300072;2.中国民航大学 电子信息与自动化学院,天津 300300;3.天津市航空装备安全性与适航技术创新中心,天津 300300)
0 引言
“十三五”以来,我国开始对电动飞机领域进行布局,进入“十四五”时期,中国民用航空局出台《“十四五”民航绿色发展专项规划》,绿色航空的概念日渐受到各方重视,同时推动了电动飞机产业的发展。电动飞机是以电机为动力核心组成的电推进系统的航空器,而永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)以功率密度高、速度范围宽等特点在电动飞机等航空航天领域得到了广泛应用[1]。因此如何控制PMSM从而提供稳定动力是保证电动飞机平稳运行的关键之一,而PMSM的闭环控制需要通过电机的转子位置或转速信息[2],来保证电机的平稳运行。由于电动飞机空中环境状况复杂多变,传感器在工作过程中可能受到的外界因素多种多样,例如高空高温和低温、复杂电磁环境等的影响,从而造成传统机械式传感器电子元件受损、受潮以及氧化等问题,使得读数漂移甚至传感器损坏,严重影响控制精度和PMSM运行的稳定性[3-4];并且传统的转子位置反馈是通过增量编码器或霍尔装置来进行,但其需要若干信号线连接,而测速发电机也需要多根信号线,这可能会导致电机的密封性能下降[5]。
PMSM在起动时,只有确定转子初始位置才能对其提供最大的起始转矩。在传统的PMSM控制系统中,通常安装光电编码器、旋转变压器等来获取转子位置信息。而无传感器控制技术的方法是在不安装传统机械式位置传感器的情况下利用其他可用的信息或技术,以实现控制和检测功能。其中信息可以来自于已有的数据源、模型、算法或其他系统。通过对这些信息与数据的分析和处理,可以获取有关环境和系统的特征,并对控制系统做出决策。
国内外许多学者对电动飞机领域中无传感器控制技术进行了深入研究。文献[6]提出在商用运输机辅助动力装置(Auxiliary Power Unit,APU)的基础上,通过无传感器控制技术测量电机电压电流,来控制回路驱动电机;文献[7]提出电气化飞机通过无传感器控制技术能够实现对永磁模块化电机驱动的异构分布式控制、结构的位置和速度自感的控制,完成模块的独立估计,为消除模块化电机驱动系统中的传感器单点故障提供了一种有效途径;文献[8]设计了一种最小角回归算法(Least Angle Regression,LAR)应用于航空电机的I/f策略和滑模观测器法(Sliding Mode Observer,SMO)的切换过程,提高了无速度传感器控制的精度,同时抑制了电流脉动和转速振荡;文献[9]提出通过无传感器的驱动器直接控制航天器的角加速度反应平台,控制算法不需要时变旋转矩阵,极大地简化了姿态控制系统的方法;文献[10]运用高频信号注入法对飞机起动电机的转子位置估计进行了深入研究。在国内的研究中,文献[11]利用线反电势过零点的原理来实现无传感器控制。文献[12]通过在航空起动发电系统电动运行状态下向PMSM注入高频信号,并利用滤波器提取所需的转子位置信号。文献[13]采用了基于基波电流观测器和旋转高频电压注入法相结合的控制算法,及基于扩展滑模观测器的无传感器控制算法,成功解决了传统机械传感器的问题,并实现了不同速度范围的高精度控制。这些研究为无传感器控制在电动飞机领域的应用提供了有益参考。
自上世纪八十年代起,无传感器控制在PMSM上的研究已有高频注入[14-16]、扩展反电动势[17-19]、磁链观测[20-21]和模型参考自适应[22]等多种控制方法。有传统机械式传感器电机矢量控制系统与无传感器电机矢量控制系统,结构对比如图1所示。本文将对当前主流无传感器控制方案的原理进行介绍并对相关的研究成果和关键技术进行总结。
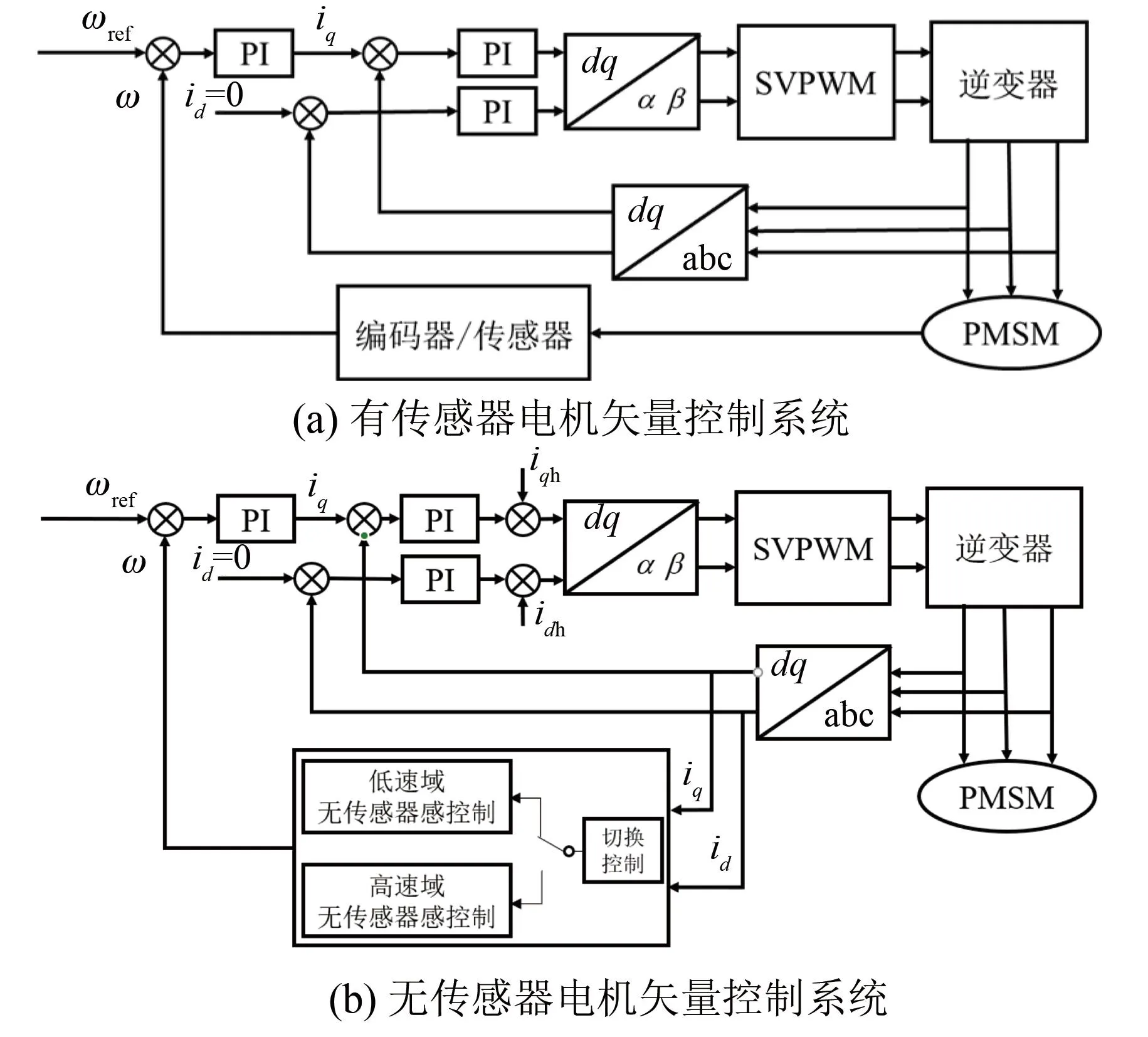
图1 电机控制结构图
1 无传感器控制技术分类
在电机高速域运行条件下,通常可以直接利用电机本身产生的较高反电动势信号进行无传感器控制;但在低速域运行条件下,电机的反电动势幅值较小,且受到噪声等因素的干扰,无法直接观测到有效的用于无传感器控制的反电动势信号。并且目前还很难得到一种能实现全速域范围的高性能PMSM无传感器控制方法。
根据德国Wuppertal大学的Joachim Holtz教授所提出的分类方法,无传感器控制方法按速域范围分为两种[23],如图2所示。第一种方法是中高速域的电机控制,通过电机基波模型利用算法获取反电动势等物理量从而计算转子位置和速度信息,主要包括开环算法和闭环算法。开环算法包括直接计算法、反电动势积分法和扩展反电动势积分法等;闭环算法包括SMO、龙伯格观测器法(Luenberger Observer,LO)、卡尔曼滤波器法(Kalman Filter,KF)和模型参考自适应法(Model Reference Adaptive System,MRAS)等。

图2 电机无传感器控制方法分类
另外一种控制方法为零低速域的电机控制,包括高低频注入法和INFORM(Indirect Flux Detection by Online Reactance Measurement)法等。高低频注入法和INFORM的原理是基于电机凸极特性利用注入激励产生的脉振信号解调得到转子信息[24]。
1.1 中高速域无传感器控制方法
电机中高速域控制通常采用反电动势或磁链中包含的转子位置信息的方式进行估计。该方法主要依赖于电机的基波模型,通过测量电机的反电动势或磁链信号值,可以间接地获取转子位置和速度的估计值。基波模型是一种描述电机动态行为的数学模型,其考虑了电机的基本特性和运行条件,并被广泛应用于PMSM控制中。通过对反电动势或磁链等信号处理和分析,并根据反馈系统观测的转子位置和速度信息,从而实现对电机的闭环控制和调节。这种基于基波模型的估计方法在中高速区域表现出良好的准确性和稳定性,使得PMSM在广泛的应用领域中得以高效运行。
1.1.1 开环算法
开环算法具有结构简单、计算量小以及实现容易等特点,但是其容易受到电机参数变化和外部未知干扰的影响,导致精度相对较低,因此仅适用于对控制精度要求低的应用场合。
(1) 直接计算法
直接计算法利用相电压和相电流计算磁链以及反电动势[25-27],从而获得转子速度以及位置角度。直接计算法的基本原理如图3所示。
常见的转子位置角度的计算式为

(1)
式中:θe为转子位置角度;uα、uβ分别为α、β轴的电压;iα、iβ分别为α、β轴电流;Ld、Lq分别为d、q轴电感;Rs为绕组电阻;p为电机极对数;ωe为转子角速度。
对于d、q轴电感相同的表贴式PMSM,该方法简单、动态响应速度较快,但未知参数或外界干扰会显著影响其计算精度。但在复杂多变的环境下,直接计算法缺乏反馈机制则限制了电动飞机电机的抗干扰能力,从而影响飞机的性能和稳定性。因此,为获得更好的估算精度,通常结合在线辨识方法进行计算[28]。
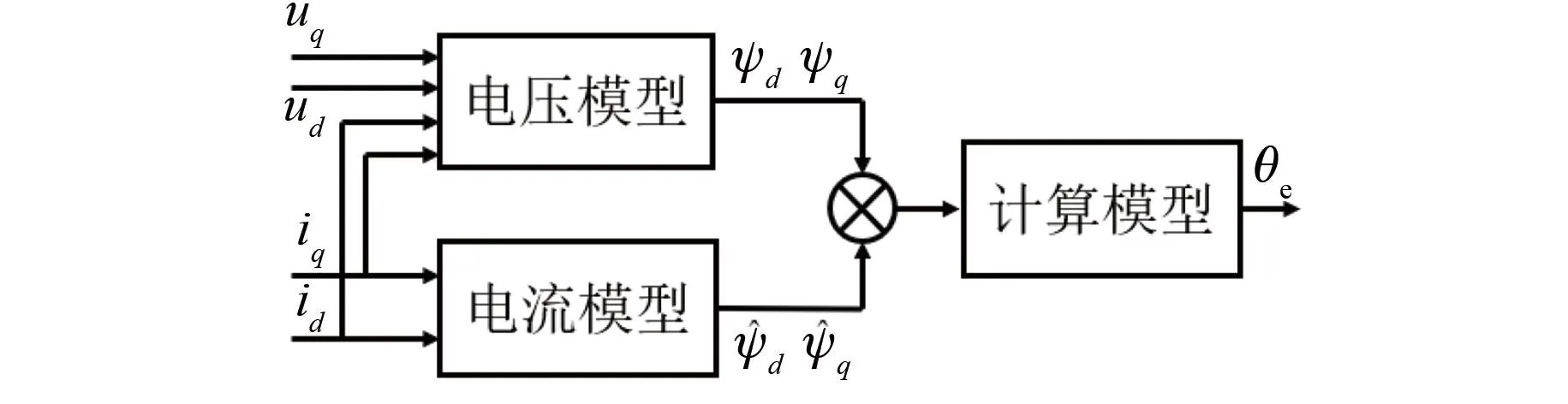
图3 直接计算法原理图
(2) 反电动势积分法
反电动势积分法,也被称为磁链观测法[5],是一种用于对PMSM的转速和位置进行估计的方法。该方法利用PMSM在α-β坐标系中反电动势所包含的转子转速和位置相关信息,通过对定子电压方程和定转子磁链关系进行微积分处理,运用arctan函数进行运算,进而得到目标估计值。反电动势积分法的工作原理与直接计算法类似,表达式为
(2)
(3)
式中:ψf为磁链;ψs为定子磁链;Us为定子电压;Is为定子电流;Lαβ为α-β坐标轴的电感;ψfα、ψfβ分别为α、β轴磁链。
反电势积分法虽然具有计算量小和动态响应快等特点,但在实际应用中,容易受到积分初值、干扰噪声等不确定因素的影响,从而导致积分漂移。算法随着时间的推移产生误差累积,在电机运行的长时间周期内,累积的误差导致电机输出偏离期望值。同时在电机起动结束阶段或运行转速是额定转速的0~5%阶段,反电动势值过低难以对电机进行精细控制,进而影响到电机的稳定运行和性能[25,29-30]。
(3) 扩展反电动势法
基于内嵌式永磁同步电机(Inner-Mounted Permanent Magnet Synchronous Motor,IPMSM)凸极结构的特点,α-β坐标系下电压方程中包含转子信息,但无法直接计算反电动势得到目标值。
为了解决这类问题,扩展反电动势法将电压方程表达为[31]

(4)
式中:ε为扩展反电动势(Extended Electromotive Force,EEMF)。
EEMF的表达式为

(5)
从式(5)中可以看出,EEMF中包含电动势位置信息和定子电感的位置信息。
1.1.2 闭环算法
闭环算法以观测器方法为基础,使用校正机制,其基于观测到的电压、电流和反电动势信息进行反馈闭环,从而提高精度和鲁棒性。
(1) 滑模观测器法
滑模观测器(SMO)法是一种可变结构控制方法,由于滑模控制的不连续性,其与传统控制算法有着本质区别[32-33]。在该方法中,SMO基于PMSM的两相静止坐标系的电流方程进行构建,利用电流闭环的误差设计滑模面。通过测量电流的估计误差,SMO实现了反电动势的重建,并进一步估计了转子位置和转速信息。其原理图如图4所示。

图4 传统SMO原理图
(2) 龙伯格观测器法
龙伯格观测器本质上是一种状态观测器,是一种用于状态重建的技术[34]。该观测器建立了PMSM的观测模型,可通过偏差反馈修正状态变量。当观测电流与实际电流相符即偏差很小时,则可通过观测到的反电动势计算出电机转子位置信息,从而实现跟踪闭环估计。与SMO相比,龙伯格观测器采用线性控制策略,可避免系统抖动,具有动态响应快、估计精度高等优点。然而,如何选择合适的反馈增益是影响观测精度的关键。基于PMSM在静止坐标系中的电流和电动势数学模型即可构建龙伯格观测器[35],其表达式为
(6)


(7)
龙伯格观测器原理如图5所示。
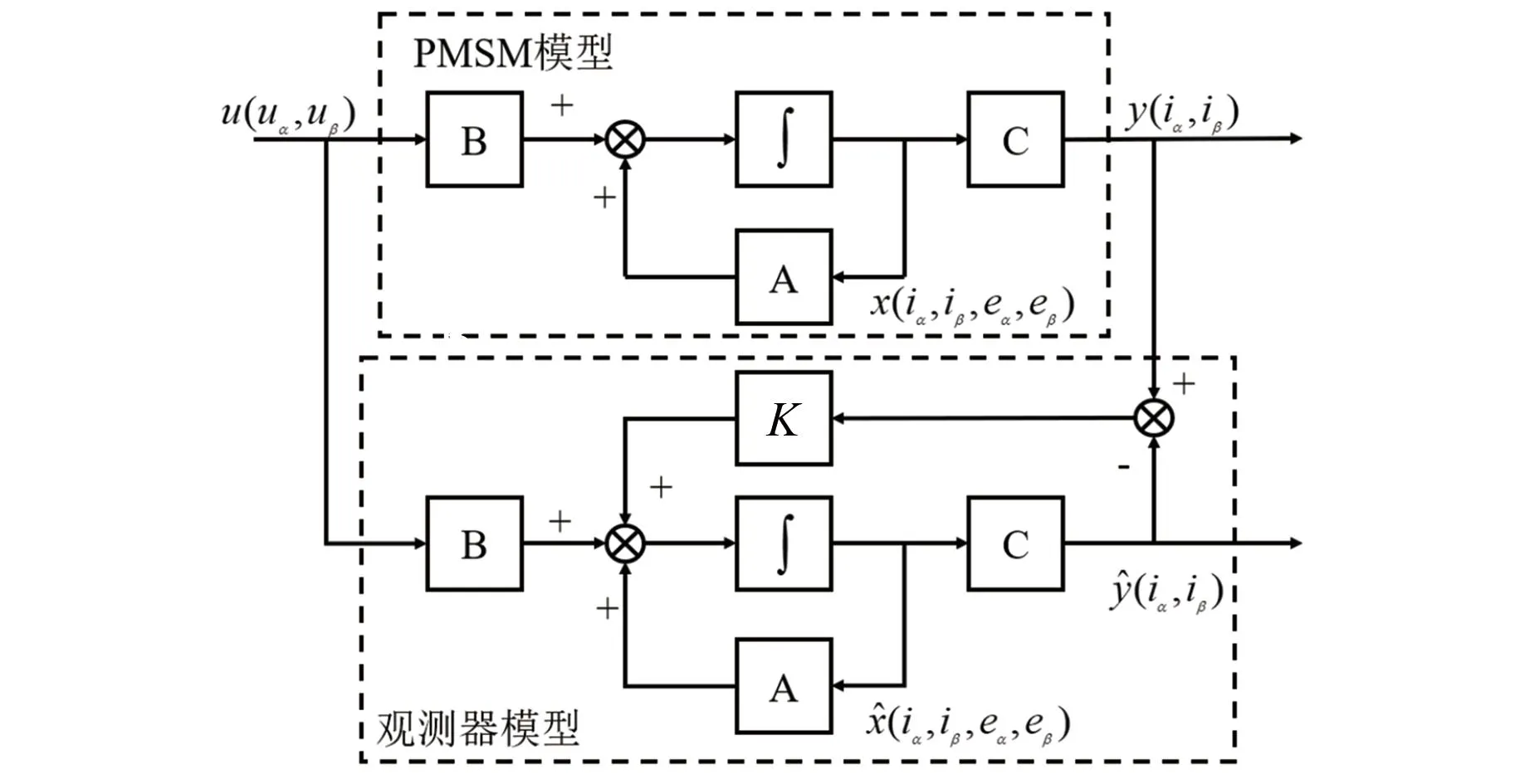
图5 龙伯格观测器原理图
(3) 卡尔曼滤波器法
卡尔曼滤波是一种线性最优预测估计方法,该方法由预测环节、修正环节和卡尔曼增益三部分组成[36-37]。这种方法适用于数字计算机的实现,其利用之前的瞬时估计值和当前的瞬时观测值来预测当前的瞬时估计值,并通过反馈修正和递归操作来实现。卡尔曼滤波器最早由R.E.卡尔曼提出[38],是在处理非线性系统随机观测器的线性最小方差估计基础上发展起来的。在卡尔曼滤波算法中,系统的状态和测量值被视为随机变量,而系统的动态模型和测量模型则用于描述这些变量之间的关系。通过将系统的真实状态值与测量值进行比较,卡尔曼滤波算法能够根据系统的动态性质以及测量的不确定性,调整状态估计值,从而实现对系统状态的精确估计。该算法的一个关键优势在于它能够自适应地考虑随机干扰和测量噪声对估计结果的影响。通过测量数据的可靠性和系统的动态特性,卡尔曼滤波算法能够根据权重的分配,有效地抑制随机干扰和测量噪声的影响,从而得到更准确的估计结果。但卡尔曼滤波器的局限在于只能应用在线性系统中,而PMSM是一个复杂的非线性系统,通常运用扩展卡尔曼滤波器(Extended Kalman Filter,EKF)和无迹卡尔曼滤波器(Unscented Kalman Filter,UKF)。
运用EKF进行分析,PMSM数学模型离散化形式表示为

(8)
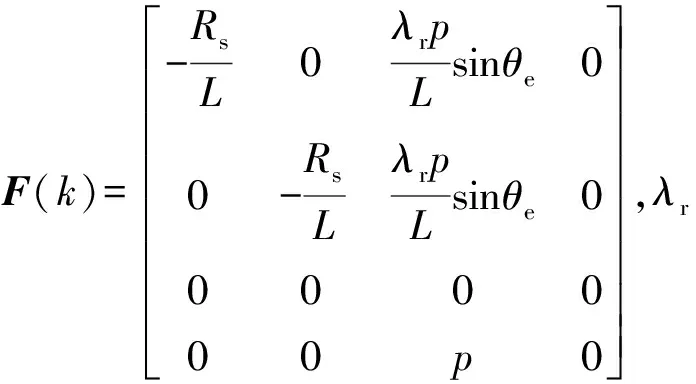

(9)

(10)

(11)

(12)

(13)
式中:P为误差的协方差矩阵;K为卡尔曼滤波增益矩阵,增益矩阵决定估计的精确度。
EKF可用于实时估计PMSM的转速,在应用于PMSM时,需要将电机方程在α-β轴上进行线性化。观测器用于估计最优转速,并通过递归公式计算实时转速,对电机转速进行连续迭代。
UKF是近些年在EKF基础上开发的一种新算法,越来越多地用于PMSM的状态估计。文献[38]比较了UKF和EKF在PMSM转子位置和转速方面的估计性能,UKF稳态的估计精度高于 EKF,但EKF在起动和动态性能方面更好。虽然UKF省去了雅可比矩阵的计算,但就需要计算的Sigma数量而言,是EKF的2.4倍。卡尔曼滤波器的缺点是在计算过程中包含多个随机变量,从而导致对控制器的计算性能要求高,分析过程复杂,获得合适的参数的时间周期较长。
目前,通常采用可编程门阵列(Field Programmable Gate Array,FPGA)技术来实现EKF转子位置观测,以进一步提升系统的响应时间和计算精度。借助FPGA技术以及半导体行业的持续进步,卡尔曼滤波法有望在EKF转子位置观测等领域实现更高效、更精确的应用。
(4) 模型参考自适应法
模型参考自适应算法(MARS)第一次提出是在1950年代,目前被广泛用于无传感器控制领域。MRAS具有参数自适应、结构简单和稳态性能好等优点[41]。其基本原理是将不包含未知参数的PMSM数学模型作为参考模型,调节包含未知参数的可调模型(通常是电流模型、磁链模型或电压模型)。根据系统数学模型,通过设计自适应律,利用模型输出之间的差值矫正可调模型,同时实现目标值估算[42]。
MARS原理如图6所示。MARS本质是参数识别,其原理基于Popov超稳定理论,所选的参考模型与估计精度密切相关。在应用该方法时,应仔细考虑选择合理的适应律,以确保系统的稳定性和鲁棒性,同时提高收敛速度。

图6 MARS原理图
1.1.3 智能算法
随着计算机科学和控制技术的不断更新换代,1990年开始发展与人工智能相结合的电机控制方法。经典人工智能方法包括神经网络、模糊算法、粒子群算法和其他具有自适应、自调节能力的智能算法[43]。目前,模糊算法和神经网络是PMSM模型中应用较为广泛的含有非线性和未知变量的电机控制方法,其中神经网络控制原理如图7所示。
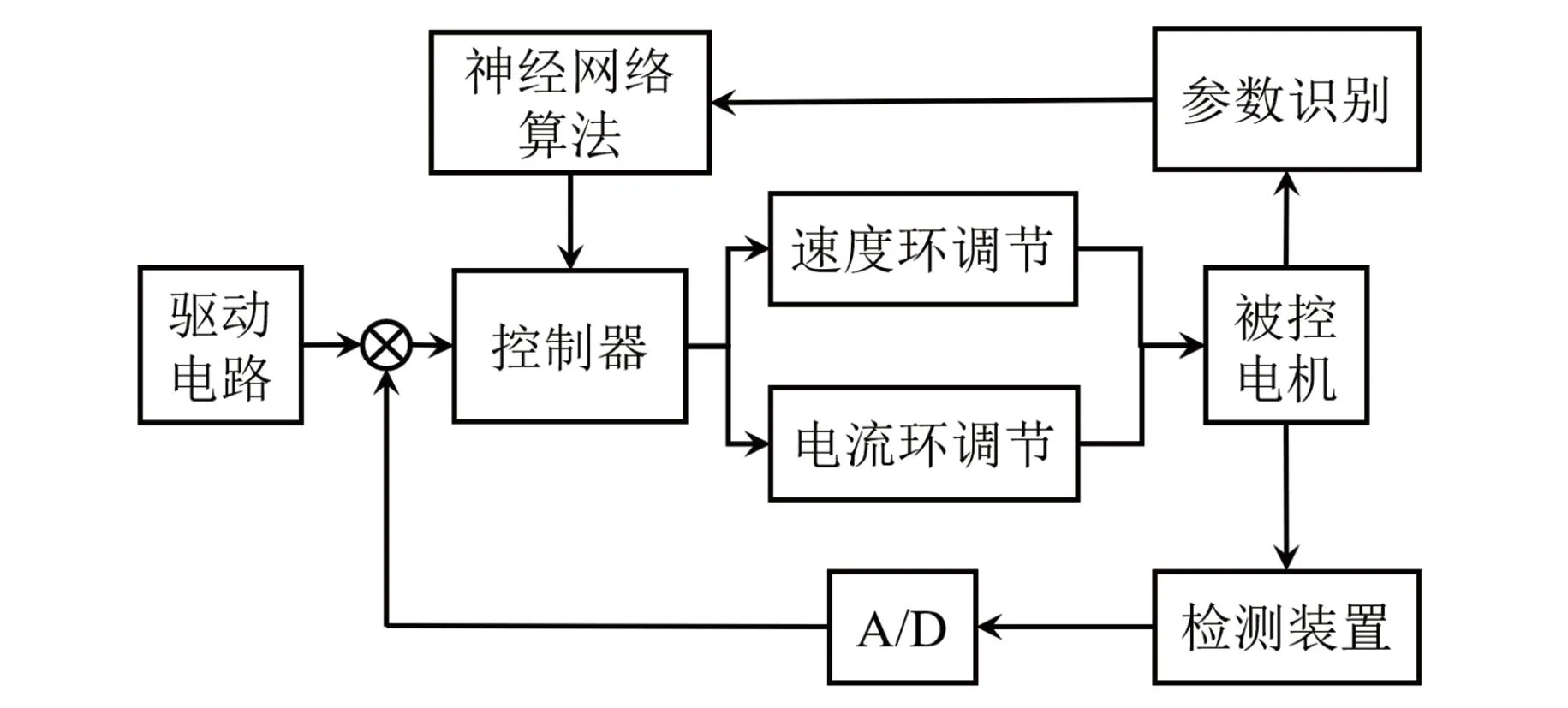
图7 神经网络协调控制原理图
人工神经网络(Artificial Neural Network,ANN)将电机参数作为输入层,电机的转子位置和转速作为输出层,通过迭代,无需确定数学模型即可实现对PMSM的无传感器控制[44-45]。通常将径向基函数(Radial Basis Function,RBF)神经网络应用于PMSM的无传感器控制系统,运用随机梯度下降在线学习和优化参数的方式,实现良好的动态响应和具有可调性的无传感器控制[46-48]。为了减少系统中的抖动现象,部分学者将模糊算法与状态观测器相结合,通过模糊算法在线调节增益大小,提高位置检测精度以及系统动态性能[49]。
虽然人工智能控制技术在电机领域的应用前景广阔,但也面临一些挑战。例如,数据的获取和处理的成本问题,以及算法的稳定性和可靠性问题都需要不断地研究和改进。此外,人工智能算法的复杂性也要求工程师在实际应用中具备更高的技术水平和更丰富的专业知识。
1.2 零低速域无传感器控制方法
PMSM转子处于零低速域时存在难以检测或无法检测转子信息的问题,最初由美国的罗伯特D洛伦兹教授等人提出了一种方法[23],即通过注入电压或电流信号来提取转子位置信息以应对这一问题。随着研究的不断深入,这一方法逐渐演化出多种变体,为解决这一难题提供了多样化的解决方案。其中根据注入信号的形式不同,分为高频信号注入法、低频信号注入法和INFORM法。
1.2.1 高频信号注入法
(1) 旋转高频电压信号注入法
旋转高频电压信号注入法仅适用凸极特性明显的电机。在基波激励上注入三相平衡的高频电压激励,产生的响应电流的负相序分量的相位中包含转子信息。
注入的高频电压信号可表示为
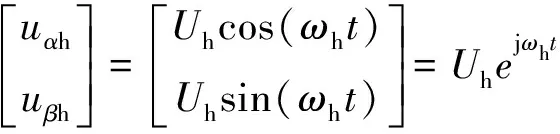
(14)
式中:uαh、uβh为注入的高频电压信号;Uh和ωh分别为注入高频电压信号的幅值和角频率。
旋转高频电压信号注入法的结构框图如图8所示。
旋转高频电压信号注入法简单、易于实施且不受反电动势的影响。但其信号处理过程复杂,同时带通滤波器(Band Pass Filter,BPF)的使用导致系统延迟,且系统动态性降低。此外,转子位置估计的准确性还受到定子电阻、交叉耦合效应和逆变器非线性的影响[55]。
(2) 脉振高频电压信号注入法
韩国学者S. K. Sul于2003年提出了不依赖结构凸极性的脉振高频电压信号注入法[56]。该方法只需向d轴注入高频正弦电压信号,该信号在空间产生脉振电压矢量,通过叠加高频正弦波信号解调脉振高频电流分量从而获得目标信息。估计和实际转子坐标系之间的关系如图9所示。
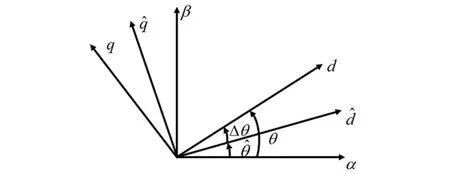
图9 估计和实际转子坐标系之间的关系
注入的高频正弦电压信号可表示为
(15)
脉振高频电压信号注入法的结构原理如图10所示,该方法在电机参数变化和负载扰动的情况下表现更为稳健。其优势在于能够更好地适应多变的工况,并在面对不确定性因素时展现出更高的鲁棒性,但该方法也存在一些挑战和限制。该方法可能受到系统动态性差的影响,导致其在一些动态响应要求较高的场景中表现地不尽如人意。其次,由于稳定范围相对较小,可能需要更精细的参数调整以保证系统的稳定性。此外,脉振高频电压信号注入法的收敛速度相对较慢,这对一些需要实时性能的应用场合会有一定的挑战[56]。并且该方法还有方波、三角波等其他形式,近年来国内外许多学者对其进行了广泛研究[29]。

图10 脉振高频电压信号注入法原理图
(3) 脉振方波电压信号注入法
该方法与脉振高频电压信号注入法无本质区别,仅仅是注入信号改为高频方波信号,其优点是无噪声、提取信息方便以及观测效果好[57]。
脉振方波电压信号注入法在注入方式、噪音控制、信号处理和位置估计准确性等方面具备优势。然而,同样需要在具体应用中综合考虑其适用性,以便在实际场景中取得最佳效果。
1.2.2 低频信号注入法
低频信号注入法是一种将低频电流信号ic注入估计的电机线性轴的方法。系统反馈估计值产生的误差,令ic产生扭矩分量造成振动,振动引起的反电动势中包含转子位置信息[58]。电流与反电动势计算式如下所示:

(16)

(17)

该方法同样不依赖电机凸极特性,可直接根据电机的动态方程估算转子位置。不过,低频注入法需要电机产生反电动势脉冲,因此估算精度与转动惯量有很大关系,通常适用于需要低速低负载运行的系统[5]。
1.2.3 INFORM法
INFORM法原理是基于在线脉冲法和电机凸极特性,通过向不同方向施加空间矢量电压并测量电流的响应,得出电机定子绕组电感随转子位置的周期性变化情况[59]。然后通过计算电感变化来估算转子位置信息。这种方法相对独立,使用简单,适用于零低速域的位置检测,但INFORM方法容易受到电流变化的影响。
1.2.4 开环V/f控制
V/f控制方法的核心原理建立在V/f恒定的基础上。当反电动势的幅值足够大,可以忽略定子电阻压降,这时反电动势几乎等同于与电流频率成正比的相电压[60]。具体而言,V/f控制方法通过动态地调整电压和频率之比,以使电机的运行状态得到精确控制。当电机运行在不同的转速下时,通过维持V/f的恒定,可以使反电动势与电流频率保持正比关系,从而在不同工况下实现相同的转矩产生。这使得电机能够在较大速度范围内保持稳定的性能。这种控制策略不仅适用于内置式PMSM,也适用于表贴式PMSM。该情况下的反电动势的表达式为
E=V=4.44fNkΦm
(18)
式中:E为反电动势;f为定子电流的频率;N为线圈匝数;k为基本绕组系数;Φm为气隙磁通。
式(18)表明,该控制方法简单,但当电势较低且定子电流频率较低时,定子电阻上的压降会变得很大。为确保气隙磁通恒定,必须对电压进行补偿,有效地抵消由于磁通变化引起的不稳定性,从而保持电机的性能和效率。此外,V/f法的稳态运行范围相对较窄,如果负载扰动较大引起频率变化,可能会导致电机的运行不稳定,进而影响输出性能,电机容易失步。
1.2.5I/f控制
I/f控制既可用于闭环电流,也可用于开环速度。V/f控制是通过电压和频率的比例关系来实现相应地控制。与之不同的是,I/f控制方法在给定的电流频率下通过积分操作来获得所需的转子位置。这种积分的特性使得I/f控制方法能够在不受电机极数影响的情况下,对转子实现准确的位置控制,从而为电机控制带来更大的灵活性和适用性。因此I/f控制方法不仅适用于内置式PMSM,也适用于表贴式PMSM。
I/f控制法的优点是可结合实际电流调节闭环电流,从而避免系统出现过流问题[61]。但缺点是在复杂多变的运行环境中,容易造成系统振荡,导致电机失速现象。
1.3 全速域复合控制方法
上述方法都无法确保无传感器控制技术在PMSM全速域运行,每种方法都只在有限的速度范围内才可以表现出卓越的控制性能。因此,在更多情况下必须采用组合控制的方法。例如结合自适应滑模的阻尼补偿I/f控制[62]、结合滑模观测器法的I/f控制[63]、结合模型参考自适应法的高频注入法[64]、结合滑模观测器法的高频注入法[65]、以及结合卡尔曼滤波法的高频注入法[66]、结合功率因数补偿的单相I/f电流值法[67]和结合有效磁链法的增强型工频控制[68]。
但如何实现两种方法之间的平滑切换是设计难点,并且切换过程的平滑性对于整个控制方案的稳定性至关重要。根据不同系统,切换方案有磁滞环切换、加权平均切换和加权中间切换。
磁滞环切换是系统会根据预设的阈值来切换控制的一种方法。当系统状态达到或超过阈值时,切换会自动触发。这种方法的优势在于简单易行,但需要精心地设置阈值,以避免频繁切换。
加权平均切换是另一种常用的方法。在这种方案中,两种控制方法的输出按照一定的权重进行加权平均,从而实现平滑地过渡。该方法可以在不同控制方法之间实现柔和地切换,减少系统的震荡和不稳定性。
另外,加权中间切换是一种综合了前两种方法的方案;其将两种控制方法的输出进行线性插值,生成一个介于两者之间的中间控制信号。这种方式可以在不同控制方法之间实现平滑过渡,同时兼顾到了输出的平衡性。
2 电推进系统无传感器控制技术
在实际开发与应用中,无传感器控制所涉及的难点是起始位置检测、低速起动和中高速运行。这些方面的处理在现代自动化系统中应用广泛,而在航空航天与电动飞机技术领域也尤为重要。
起始位置的检测是电动飞机推进用PMSM无传感器控制中的首要难点之一。电动飞机的起飞过程涉及到复杂的动力和飞行控制,准确且快速地检测起始位置对于确保飞机的平稳升空以及避免起飞失控至关重要。
其次,低速起动是电动飞机推进用PMSM无传感器控制中的另一个重要难点。在低速飞行阶段,飞机处于较低的动力状态,其飞行动态响应较为迟缓,因此对于控制器和控制算法的设计提出了更高的要求。学术界致力于开发新的控制策略,以实现低速起动过程中的平滑过渡和稳定控制,防止飞机出现震荡、摇晃等不稳定现象,从而确保飞行过程的安全性和可靠性。
最后,中高速域运行是电动飞机推进用PMSM无传感器控制的第三个关键方面。随着飞行速度的增加,飞机的动态响应变得更为敏感,惯性和气动特性对于控制系统的影响显得尤为重要。目前研究重点是结合先进的自适应控制和模型预测控制方法,来适应快速运动过程中的复杂控制需求,保持飞机的稳定性和航行性能。
2.1 起始位置检测技术
(1) 电感参数法
电感法利用定子绕组和PMSM的磁链特性,通过观测值来确定转子的初始位置。定子绕组中的电流变化率是铁心磁导率的函数,因此可通过电流变化率获得转子的位置信息。比如内置式电机可以控制电流滞环检测交直轴的电感来获得转子的位置信息[69]。
内置式PMSM和表贴式PMSM交直轴的电感大小不同,为了计算不同电机类型的电感参数,将线性独立的电压矢量分别施加到两个绕组上,测量电压矢量引起的瞬时响应电流。通过分析响应电流的变化,可以得到电机的电感矩阵。电感参数反映了电机不同坐标轴上的电感大小,为后续的转子定位和电机控制提供了关键的信息。需要注意的是,电感参数的计算对于实现精确的转子位置估计和电机控制至关重要。这为电机在不同工作状态下的高效控制提供了支持,使得内置式PMSM和表贴式PMSM能够在各自的应用领域中发挥出色的性能,其电感表达式为
(19)
式中:L1和L2分别为共模电感和差模电感。
电感参数矩阵表达式如下:

(20)
瞬时电流响应表达式如下:

(21)
式中:Uαi和Uβi分别为为定子直轴和交轴的电压;L1i和L2i为分别为定子共模电感和定子差模电感;i=1,2表示施加电压次数。
通过上述计算得到转子位置的电角度,其表达式为
(23)
(2) 信号注入法
信号注入法是一种应用于航空电动飞机电机中的定位技术,通过向电机定子通入测试电压信号,会在电机磁路中引起一定的非饱和效应。这种非饱和效应会导致定子电流的变化,进而在定子电流中产生一些特征变化。通过分析这些特征变化,可以推导出与转子位置相关的信息。这种方法利用了电机的结构特性,实现了在电机运行过程中无需额外传感器的转子位置检测。这一方法可以在初始静止状态下实现电机转子位置的准确测量,从而为电动飞机推进用PMSM电机的精确控制和性能改进提供重要支持。
2.2 低速域起动
三段式起动法是指一种没有位置传感器的控制方法,该方法采用转子预定位、强制起动和闭环操作的三阶段过程。预定位阶段对绕组施加恒定电压脉冲,完成转子位置初始化。同时通过施加特定电压矢量或电流矢量到绕组中,实现了电机的有序旋转,这使得电机能够从不工作逐渐进入低速运行状态。当转子实时转速达到额定转速的15%时,无传感控制算法已可以提供稳定的控制信号,以完成强制起动。
由于三段式控制方法本质上是一种开环控制方法,预定位阶段可能会造成电机反转,所以三段式起动方法适用于起动转矩较小且允许起动反转的系统[5]。
2.3 中高速域运行
目前中高速域的无传感器控制技术主要有以下几种算法:磁链估算法、滑模观测器法、模型参考自适应法和卡尔曼滤波法。以上方法均已在第1节中阐述。
3 未来发展方向
无传感器控制技术为PMSM的高精度控制提供了一种重要途径,提高了PMSM在电动飞机上的适用性。
电动飞机由于其独特的能源来源和推进系统,与传统燃油动力飞机存在明显差异,因此需要针对其特点开发全新的无传感器控制技术。虽然目前在电动飞机领域尚未有明确的无传感器控制应用案例或产品发布,但该技术仍备受关注,是当下研究的热点方向。航空工程师和科学家们正在不断努力推动无传感器控制技术的进步,以满足电动飞机的需求。无传感器控制技术的实现对电动飞机具有重要意义,其有望减轻飞机重量、降低成本以及提高系统可靠性。
然而,值得注意的是,无传感器控制技术的开发和应用面临着多方面的挑战,包括数据准确性、系统稳定性以及安全性等问题。在引入无传感器控制技术之前,必须经过严格测试和验证,以确保其在实际应用中的可行性和可靠性。虽然电动飞机行业具有光明的前景,但在推广无传感器控制技术之前,需要克服这些挑战,以保障飞机的安全性能。
尽管在电动飞机领域,该技术目前仍处于起步阶段,但随着科技进步和电动飞机技术的成熟,无传感器控制技术有望成为未来电动飞机领域的重要发展趋势。此技术在工业生产中已有多种应用,但其仍有进一步发展和改进的空间。
(1) 对算法的优化和改进是无传感器控制技术的重要方向。通过深入研究和改进控制算法,可以提高电机控制的性能和精确度,实现更高效的无传感器控制方式。甚至可以结合智能化和自适应控制方法,以实现更高级别的控制策略。采用先进的传感器融合算法和模型预测控制等技术,可实现更精确的电机控制,提供更高级别的功能。
(2) 无传感器控制技术可以将来自多种数据源的信息进行多模态传感器融合,实现系统的自主飞行与自动化。例如全球定位系统(Global Positioning System,GPS)数据、机载传感器数据、地面雷达数据和惯性导航系统等,更多种类的数据被集成到系统中以获取更全面和更准确的飞行状态信息,并将其反馈给电推进系统,优化电机动力分配,实现更高自由的自动化,包括自主决策和避障等功能。
(3) 无传感器控制技术需注重系统的安全性和鲁棒性,以应对潜在的故障和攻击。采用多重备份和冗余系统等方法可以增加飞行器的可靠性和安全性。无传感器控制技术也可以通过使用多个不同类型的传感器来增强系统的鲁棒性。例如,结合机载视觉、激光雷达和惯性传感器提供更多的数据源,减少单一传感器的故障可能性;同时系统应该具备故障检测和容错机制,能够通过无传感器技术自动检测传感器故障或数据异常问题,并采取适当的措施,如切换到备用系统或降低飞行器性能以确保安全。
(4) 未来随着飞行器数量的增加,无传感器控制技术的应用对于改进空中交通管理至关重要。例如考虑天气状况和其他飞行因素,更有效地规划航线,协调和优化飞行器的进出港时间,以平衡空中的交通流量,减少拥堵和等待时间,进而提高交通效率。若结合人工智能和机器学习等技术以支持智能航空管制系统,可以提高空中交通系统的响应速度和适应性,同时可以减少由于人为因素引起的潜在问题。
4 结语
本文以转速范围划分综述了无传感器控制方法,包括信号注入法、V/f控制、I/f控制以及基于观测器/滤波器的无传感器控制等方法。研究分析了国内外电机无传感器控制技术的发展现状,对各种无传感器控制技术的原理、适用场合进行了总结。最后对无传感器控制技术在电动飞机领域的未来发展趋势进行了展望。
Review on Sensorless Control Technology of Permanent Magnet Synchronous Motor for Electric Aircraft Propulsion System
MI Yanqing1,3*, YUAN Bing2,3, ZOU Chengzhi2,3
(1.Tianjin Internal Combustion Engine Research Institute, Tianjin 300072, China;2.College of Electronic Information and Automation, Civil Aviation University of China, Tianjin 300300, China; 3.Tianjin Aviation Equipment Safety and Airworthiness Technology Innovation Center, Tianjin 300300, China)
Keywords: electric aircraft; electric propulsion; permanent magnet synchronous motor; sensorless control
With carbon peaking and carbon neutrality already on the agenda of many economies around the world, including China, green development has become an urgent need for the aviation industry, and reducing aircraft fuel consumption and carbon emissions is the core task of green aviation. Since electric energy has the advantages of clean and safe, easy to transform and transmit, and with the development of power electronic equipment and control electronic technology, electric aircraft with electric motor as the power source has gradually been emphasized by various countries. As one of the key technologies of electric aircraft propulsion system, how to accurately obtain the rotor position and rotational speed and other information of permanent magnet synchronous motor drive technology is a necessary condition to realize the precise vector control of permanent magnet synchronous motor. Compared with the traditional position sensor-based control technology such as photoelectric encoder, the permanent magnet synchronous motor sensorless control technology does not rely on the position sensor and utilizes other available information in order to achieve the control and detection functions. It avoids problems such as the easy failure of mechanical position sensors in high-altitude and complex environments, and at the same time, it can also be able to better meet the requirements of high reliability for electric aircraft.
This paper first systematically introduces the key technologies and applications of sensorless control of permanent magnet synchronous motors for obtaining rotor position, rotational speed and other information for the electric aircraft propulsion system. It explains why it is impossible to utilize a single method to achieve accurate control of the motor. Based on the speed domain division framework, the principles and advantages and disadvantages of different sensorless control technologies are discussed in detail, and the medium and high speed domain sensorless control methods, the zero and low speed domain sensorless control methods, and the full speed domain composite sensorless control methods are all elaborated in depth, so as to facilitate the readers′ comprehensive understanding of the various methods of sensorless control technologies. The current PMSM control method only shows excellent control effect in the appropriate speed interval, the speed range is limited, and there is not yet a method that can realize sensorless operation in the full speed range. Therefore, composite control methods must be used, i.e., the control methods of the above two speed ranges will be mixed to control and complement each other′s advantages to realize the speed estimation in the full speed range, and the difficulty in the design of composite control methods lies in how to realize the smooth switching of the two types of methods. The composite control strategy has become the research hotspot of sensorless control technology nowadays, and its development is the general trend.
Secondly, the start position detection, low-speed startup and medium-high speed operation of motors have been the hot spots of sensorless control technology research. Starting position detection relies on initial state estimation and starting strategies, low-speed starting uses advanced control strategies to ensure smooth motor startup, while medium and high-speed operation requires fine speed and position control, and methods such as MARS, SMO, etc. are usually employed to achieve excellent performance. These methods provide extensive research and practical value for sensorless control techniques for electric motors, and are particularly important in aerospace fields such as electric aircraft.
Finally, the study points out the problems associated with current sensorless control techniques, such as inaccurate start position detection, unstable low-speed startup, and control difficulties for medium- and high-speed operation. Then, possible future directions of the technology are discussed,including improving the start position detection algorithm, optimizing the low-speed start-up strategy, and introducing more reliable control methods for medium- and high-speed operation to achieve more accurate and stable sensorless control. Problems with the current research are pointed out, and possible future directions for the sensorless control technology of PMSM for electric aircraft propulsion system are discussed.

Fig.1 Classification of PMSM sensorlesscontrol methods
