基于Tomo-PIV技术的螺旋桨三维强旋转流动的实验研究
2024-01-29曾子扬余志强方兆波季志伟
曾子扬,余志强,方兆波,季志伟,单 峰
(华中科技大学能源与动力工程学院,武汉 430074)
0 前言
随着流体机械设计理论的发展,各类流体机械以及水力发电装置的机械结构趋向于精细化、复杂化,对应的流场结构也变得相对复杂,具体表现为强三维特性,即三个方向上的速度分量量级相同且并不遵循简单的运动规律。然而,传统的点测量技术如速度探针、皮托管等在测量时会对原有流场产生干扰,不易获取较为精确的数值;平面PIV 技术只能获取固定平面内的速度分量,不足以掌握强三维流动的全部特征。层析粒子图像测速技术(Tomo-PIV)能够精确获得流场中的粒子三维速度分布的特征,在流体机械复杂流场结构的精密测量中有着较为广阔的应用前景。基于Tomo-PIV 技术,本文采用自行设计的测量系统,以普通三叶螺旋桨为例对其尾部射流结构进行了测量。
目前国内外对于螺旋桨的尾部流场结构的研究主要集中于PIV 实验测量及数值模拟两种方式。
在PIV 技术应用方面,Paik Bu-Geun 等[1]利用平面PIV 技术测量了处于船舶主体尾流影响下的螺旋桨尾流结构,分析了上、下螺旋桨平面尾流的差异性;L.Wang 等[2]利用PIV 技术对DARPA 潜艇后方的E1658 型螺旋桨在大型自由表面空化通道之中的尾流结构进行了研究,发现实验数据与理论数值模拟的结果基本相同;Can Cao 等[3]采用PIV 技术和UVP(超声波速度剖面仪),以黄原胶液体为例,研究了非牛顿流体之中由螺旋桨转动而引起的滞后效应,认为流场之中正应力的分布是决定流场结构的关键性因素;B.Friedhoff 等[4]在利用2D3C-PIV 技术对系柱拉扯条件下的导管螺旋桨尾流进行测量时,采用了创新性的“Shake-the-Box” 算法和新的硬件设备,用于克服原有PIV 方法之中粒子分辨率低和跟踪难度大的问题,并在此基础上取得相应进展。Mario Felli[5]首次将层析PIV 技术应用于螺旋桨尾流的水动力和水声传播影响的分析之中,利用精确的速度场和压力场重构出了尾流的涡结构并建立模型进行分析;Lefevre Lauriane等[6]采用PIV 技术对直升机螺旋桨周围的速度场进行了研究,并分析了螺旋桨上下游旋翼下方流场的变化。国内方面,李广年等[7]针对大量的螺旋桨尾流场二维PIV 试验数据,基于得到的尾流中尾涡片经过区域速度的分布情况,描述了螺旋桨尾涡的静态结构和动态演化情况;张国平等[8]利用PIV 和LDV 技术对DTMB-P4119 标准螺旋桨的尾流场结构进行了测量,清晰地捕捉到了尾流结构中梢涡和尾涡片结构,并对比了两种方法的测量结果,证明了平面PIV 技术在复杂流场测量上应用的可能性;张军等[9]利用随车式PIV 在拖曳水池进行了导管螺旋桨的内流场及近场尾流测量,很好地获得了转子梢涡、毂部涡、螺旋桨上下表面脱落的旋向相反的尾涡的结构和分布情况。王恋舟[10]通过2D3C-PIV 技术对敞水条件下孤立螺旋桨以及艇-桨一体系统中螺旋桨的尾流场进行了测量,从多角度分析了螺旋桨尾流的水动力行为,着重研究了螺旋桨尾流的不稳定性触发机制,并基于此提出了螺旋桨梢涡的演化模型。
在数值模拟研究方面,Kwang Jun Paik[11]采用两种不同的螺旋桨数据模型,通过仿真建模研究了不同几何尺寸的螺旋桨周围流场结构的特点以及其水动力特性;Sezen Savas[12]采用改进的V-AMR 技术,并结合Schnerr-Sauer 传质模型来模拟空泡,用以准确求解梢涡流动并模拟螺旋桨滑流中的梢涡空泡;Di Mascio A 等[13]利用分离涡模拟方法分析了不同载荷情况下在自由液面下工作的螺旋桨尾流中的涡结构,结果表明低载荷情况下与敞水条件下的工作情况类似,而高载荷条件下涡系统与自由表面的作用掩盖了敞水条件下观察到的配对机制;Zhi Yuchang 等[14]采用动态模态分解(DMD)和重构的方式,对尾流结构中产生的叶尖涡和轮毂涡模拟得到的瞬态涡尾迹结构进行分析,表明了基于DMD 降阶模型的流场重建在预测螺旋桨尾流和控制螺旋桨运行方面的可行性;Ding Guoping 等[15]利用光纤布拉格光栅(Fiber Bragg Grating,FBG)传感器获取螺旋桨水下应变信息,采用随机子空间辨识(SSI)方法对螺旋桨工作模态参数进行辨识。国内方面,苏玉民等[16]利用基于速度势的低阶面元法计算船舶螺旋桨的尾流场,较为真实地模拟了螺旋桨的运转情况,与实际测量的数据基本相符;叶金铭等[17]在基于速度势的面元法的基础上,根据尾涡面必须和当地流体流速相切的原则,修正原来尾涡面的形状,逐步迭代直至螺旋桨的尾涡形状收敛,提高了螺旋桨水动力性能的预报精度。
总结上述工作,目前对于螺旋桨尾部流场的研究以数值模拟和实验测量的方式并行,但总体以数值模拟构建模型为主,且着重于研究尾流结构之中的涡环结构,以及涡的产生、脱落和破碎机制。但是,三维实验的工作仍然有所欠缺。因此,本文将利用层析粒子图像测速技术(Tomo-PIV)获得螺旋桨尾流流场的三维结构,并从瞬时特性和时均特性两个方面对速度场、涡量场和压力场进行分析。
1 实验装置与数据处理
1.1 实验装置
本实验系统主要包括Tomo-PIV 测量系统以及射流循环系统。图1(a)展示了四台相机的布置情况和系统组成;图1(b)展示了伺服电机和螺旋桨的实物图。为了对空间三维流场进行测量,Tomo-PIV 系统采用了四台高速相机水平布置在水槽两侧,相机与水槽之间夹角为45°,拍摄帧率为125Hz,通过同步器同时触发四台相机进行拍摄。为了获得亮度合适的流场,实验采用功率为40W 的单脉冲激光器,激光波长为527nm,体积光厚度为24mm;为了获得目标尺寸的体积激光以对测试流场进行照明实验,系统利用光学透镜将入射的线激光整形为体积光,而后通过光路调整组将激光垂直反射至预定位置。
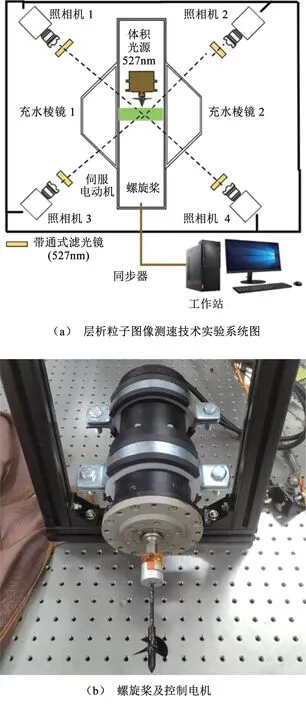
图1 实验系统示意图及实物图
实验中拍摄体积范围为120mm ×80mm ×24mm,由4 台CMOS 摄像机进行拍摄(8 位显示5KF20 高速摄像机,1280 ×1024 pixel),并使用两个充满水的梯形棱镜来最小化像散像差以及视差畸变的影响。四台相机各配备105mm 镜头,镜头与相机之间通过移轴转接环连接,以保证在f/16 孔径的整个120mm 宽的体积上保持可接受的对焦度。四台相机均与同步器连接,以确保准确地在同一时刻进行拍摄。示踪粒子采用直径为50μm 的中性浮力聚酰胺颗粒,浓度约为每个像素0.03 粒子。实验在24mm 深度上沿5 个共平面和等距位置对三维校准目标进行校准,采用的标定板为黑色背景,上面为1.5mm 白色标记的双平面点阵列,阵列中的点沿水平和垂直方向的间隔均为5mm。
1.2 数据处理
利用Lavision 公司的软件Davis 10.2.0 的乘法代数重建技术(MART)算法对粒子图像进行体积粒子强度重建,并采用体积自校准技术进行不对准校正[18-19]。经过体积自校准后,整个测量域视差向量的强度降低到0.08 像素以下。随后对原始图像进行预处理,先减去整个序列中每个像素处的最小强度,然后在16 ×16 像素的核上再减去局部最小值。重建的体积大小为110 ×60 ×23mm3,对应1536 ×840 ×320 体素。采用MART 算法进行6 次迭代分析光照体积内的区域,并将光照区域内由幽灵粒子和真实粒子给出的重建粒子的平均强度与周围环境的平均强度进行比较,得出图像信噪比高于8。三维粒子场位移采用多通道FFT 互相关程序计算,初始窗口大小为64 ×64 ×64 体素,窗口重叠率75%,最终窗口大小为32 ×32 ×32 体素,重叠率75%。所得到的速度场包含192 ×105 ×40 个矢量,在x、y和z方向上的矢量间隔为0.57mm。对每个相关窗口应用体积变形,并应用通用离群值检测和递归替换程序对直接相邻向量在5 ×5 ×5 范围内的平均值,对向量场进行后处理,得到重构的速度场、压力场和涡量场等数据。
2 结果与讨论
2.1 螺旋桨尾流结构的时均特性
图2(a)为螺旋桨射流的三维时均速度分布图,图2(b)为沿程等距截面上的截面速度分布图。可以看出,射流主体大致满足沿桨毂轴线方向呈中心对称,伴随着射流在轴向运动的充分发展,射流主体逐渐向周围环境径向扩散,速度降低,直到融入周围静水环境;对比图2(b)可以看出,在X=0~±0.5D(D:此处定义为从螺旋桨根部到尾流场中速度降低为整个速度场中最大速度Vm的0.1 倍之间的距离)左右的范围内有流体沿着射流初始运动的反方向逐渐向Y正方向运动,由图3(a)可以看出在射流充分发展的末端形成两个对称的大涡,推测是由于两个大的涡旋的存在,导致射流轴心线上存在明显的回流运动,构成了桨毂前方的回流区。并且,射流主体整体存在顺时针旋转的趋势,随着射流的径向扩散,其周向顺时针旋转的速度也不断减小。
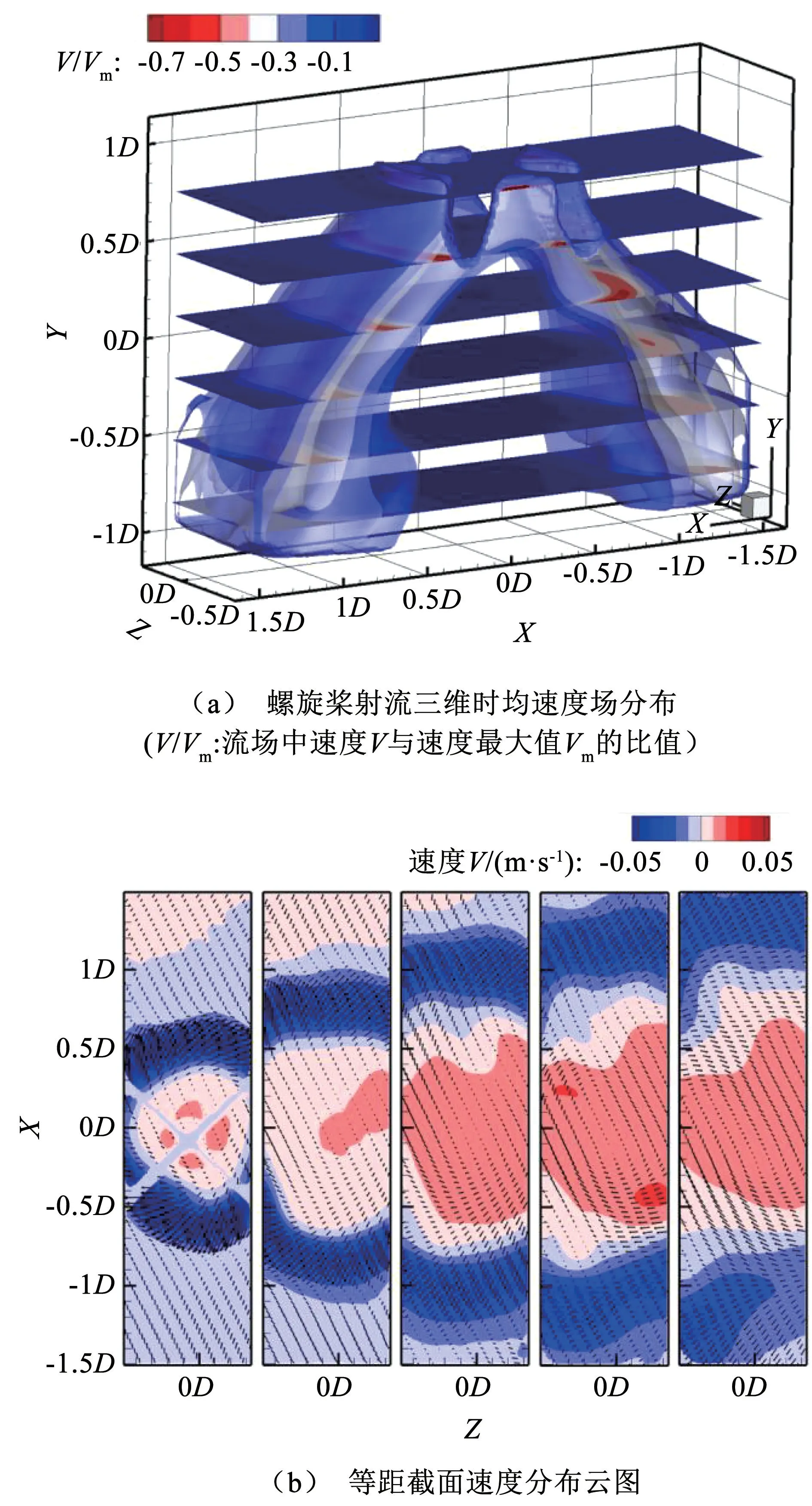
图2 螺旋桨射流三维时均速度场分布和等距截面速度分布云图

图3 螺旋桨中心面(Z=0)处速度和无量纲法向涡量分布图
在流场中,涡量在一定程度上可以反映流场内部涡旋的大小和方向,通过得到的速度场可以计算出时均涡量场的空间分布,涡量值采用流出速度进行归一化,得到的结果如下图所示:
从图4(a)中可以看出,两股射流的方向上有两条正负交替分布的涡量带,其主要由螺旋桨叶射流的剪切运动导致。同时可以从图4(b)中观察到,随着射流主体沿轴向的逐渐发展,涡量逐渐衰减,说明产生的涡环结构可能出现了合并、破碎或者重组等一系列现象导致涡环能量耗散,由图3(b)也能够进一步看出涡量随射流发展方向衰减的趋势。
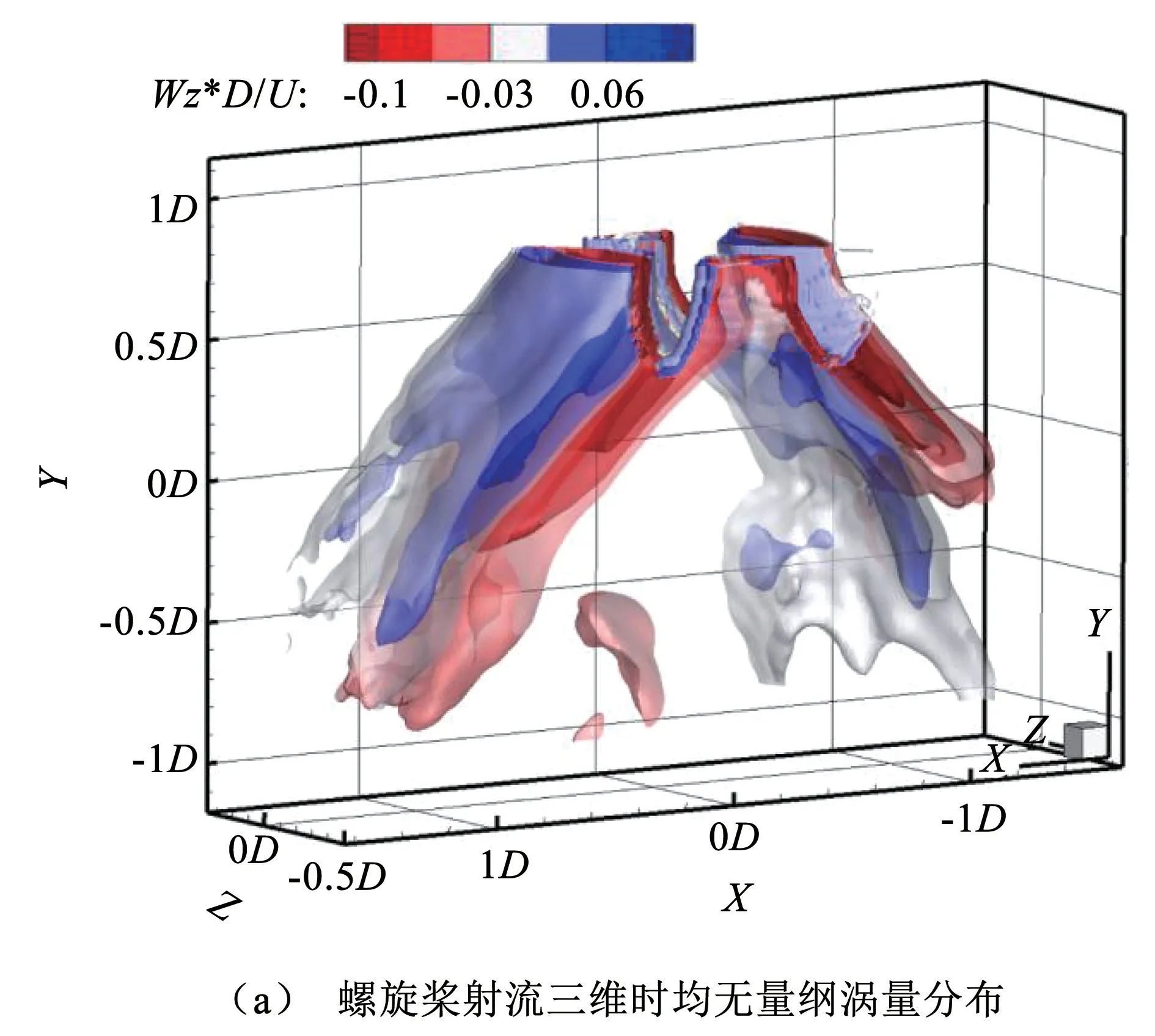
图4 螺旋桨射流三维时均无量纲化法向涡量场分布和等距截面无量纲化法向涡量分布云图
为进一步了解流场中压力的分布,现采用雷诺平均的纳维-斯托克斯方程(RANS),利用得到的速度场进行积分得到重构的压力场如图5所示。
从图5(b)中可以发现,在螺旋桨盘面附近出现了明显的局部的低压区域,是因为螺旋桨不断抽吸周围的流体并使之加速,压力能转化为动能导致压力降低;被抽吸的液体以射流的形式喷出,其压力分布近似关于桨毂中心线呈轴对称分布。随着射流的发展,压力逐渐趋于稳定,两股射流之间的区域压力升高,可能是出现回流现象导致此处绝对流速降低而压力升高。同时从图5(a)可以发现,集中分布的两个低压区域正好对应了射流发展末端出现的两个大涡结构,符合漩涡的压力分布。
螺旋桨射流流动是一种强三维特性的流动,螺旋桨的周期性转动会导致流场结构出现周期性的变化,仅研究其时均特性不能很好地反映瞬时变化的周期性规律,下文将对于其尾流结构的瞬时特性展开研究。
2.2 螺旋桨尾流结构的瞬时特性
为更清晰地观察螺旋桨尾流结构中瞬态的变化情况,图6 从两个不同的视角方向展示了在6s 内每间隔2s 流场瞬时速度场的变化。
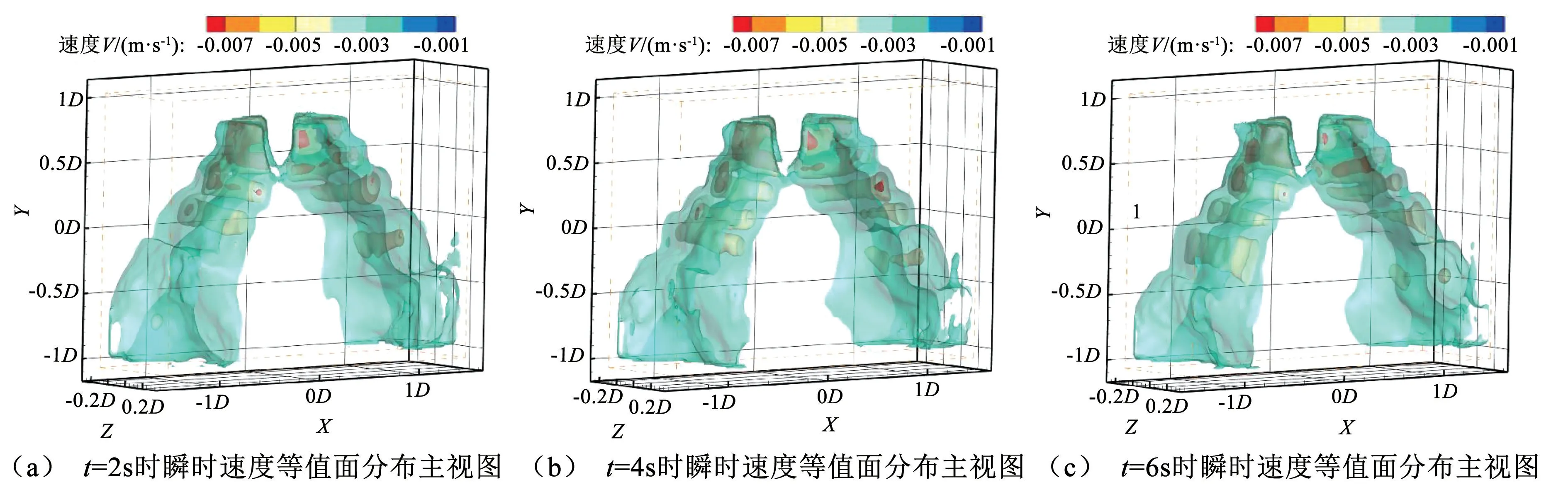
图6 螺旋桨射流瞬时三维流场,速度V=0.002、0.005、0.007m/s 处的等值面示意图
不同于前文所述及的射流主体内部速度分布变化较为连续的情况,从图6(a)~(c)可以看出瞬时的速度场中射流主体内部出现了许多小的环形动量带,各动量带中心线基本沿射流主体运动方向分布,且各动量带中的速度明显低于周围射流主体的速度。伴随着时间推移,这些动量带沿着射流方向进行输送,最后在射流发展的末端合并随后消失。当射流发展到相对稳定的阶段时,在一个周期内此类动量带以相对固定的频率产生、旋进再到消失。同时从图6(d)~(f)观察到各动量带中心线与XZ平面存在一定的夹角,推测其可能是一个周期内流体受到倾斜的螺旋桨叶的不连续推挤而导致。
此类环形动量带导致了射流主体内部瞬时的速度差,进而让射流主体内部产生瞬时的涡环结构。旋流强度相对于涡量能够更直接的体现出涡环结构的旋转情况[20],因此图7 体现了6s 内每间隔2s 螺旋桨射流流场结构中漩涡强度的瞬时分布情况。

图7 螺旋桨射流瞬时三维流场旋流强度等值面分布示意图
从图7(a)~(c)的过程中可以发现,涡环在螺旋桨桨毂和叶梢附近产生,在射流发展的末端消失,大致分布在两股射流的主体之中,且末端出现两个较大的涡环,与前文述及的分布规律相符。此类涡环序列产生的原因是桨叶的转动带动了流体微团的转动,而在末端因为相邻涡对的合并和破碎导致其能量耗散而消失。同时注意到与环形动量带的分布情况不同,涡环的中心线沿着射流主体运动方向在其两侧交错分布,推测可能是由于涡环产生的位置不同,即于叶梢处产生的叶尖涡和桨毂处产生的桨毂涡具有不同的速度分量,导致了合成的涡环呈交错分布状态。
图8 展示了某一时刻瞬时压力分布和旋流强度分布的关系:

图8 某时刻螺旋桨射流瞬时三维流场压力分布及对应时刻旋流强度分布图
可以看出在对应有涡结构的地方存在明显的低压区,而在相邻的涡对之间的区域压力较高,在射流主体内部存在明显的压力波动分布,与漩涡的物理性质相符;随着射流发展,涡环之间发生合并和破碎,导致能量耗散,压力波动减弱。同时在射流发展的末端存在明显的对称分布的大低压区,说明有对称的大涡环结构存在,与时均特性得出的结论相符。
3 结论
本文利用自行搭建的Tomo-PIV 测量系统,以三叶螺旋桨为例对其射流的三维流场进行了测量,并从时均特性和瞬时特性两个方面对流场结构的三个特征参数进行了阐述:就时均特性来看,射流主体近似于沿轴向运动的同时沿径向扩散,涡量沿速度方向分布为两组正负相邻的涡量带,而压力近似为由盘面附近的低压转变为流场中的较高压,并随着射流发展趋于稳定;就瞬时特性来看,出现了瞬时环状动量带的输送以及涡环的输送。瞬时压力分布也与这些涡环结构有紧密联系,体现为瞬时的涡环结构中心存在明显的低压区,相邻涡环之间为高压区。测量结果与漩涡的物理规律和观测到的流场运动情况基本相符,证明本文中所采用的自行设计的Tomo-PIV 系统能够对于三维复杂的流场结构进行精密测量,对于其他水力机械复杂三维流场的精密测量也有着十分可观的应用前景。