人体皮肤摩擦行为的研究进展及其挑战1)
2024-01-25韦慧心王世斌李林安王志勇李传崴
韦慧心 * 王世斌 * 李林安 * 王志勇 * 李传崴 *
*(天津大学机械工程学院,天津 300354)
†(南昌大学工程建设学院,南昌 330031)
皮肤覆盖人体表面,直接与外界环境接触,保护着体内各组织器官免受物理、化学、机械和病原微生物的侵袭,是人体抵御外界环境的第一道防线。日常生活中,皮肤会因劳动、运动、保暖、健康和美容等需求接触多种材料,从而产生皮肤摩擦问题。对皮肤摩擦行为的深入研究,将推动化妆品、医学、触觉传感器、机器人等众多领域的发展,近年来受到越来越多的关注[1]。
皮肤摩擦在生活中随处可见,人类一天中洗澡、剃胡须、皮肤护理、触摸物体、挑选织物以及穿衣服等行为都离不开皮肤摩擦学[2]。皮肤的摩擦学特性不仅能评价护肤产品的使用效果[3-5]、织物的舒适性[6-8],而且有助于研究皮肤病理学等相关热点话题[9-14]。例如,织物领域,为了避免人类运动过程中产生水疱和溃疡[15],必须着重研究脚底皮肤、袜子和鞋之间的摩擦行为[16]。病理学评估方面,皮肤的摩擦特性已经被用于研究个体皮肤病过程[1]。此外,皮肤的摩擦行为与触觉感知息息相关[17-18],人类不仅能够利用皮肤触觉识别不同表面特征、空间特征、材料属性的物体,还能基于触觉检测物体滑脱,实现对未知物体的精准抓握和灵活操作。2020 年9 月美国计算机社区联盟发布第四版《机器人路线图:从互联网到机器人》[19],明确指出未来15 年目标是研制和发展复杂机器手,其功能接近人类皮肤触觉。理解皮肤触觉正是进一步推动精细化机器触觉的前提,其关键在于对皮肤接触力学和摩擦行为的深入研究[20]。
作为一种生物材料,人体皮肤有着复杂的解剖结构,使其具备非线性、黏弹性、各向异性以及非均匀性等复杂的力学特性,在法向及切向力下呈现出“小载荷,大响应”特点,这些特性与皮肤的摩擦性能息息相关。此外,自身因素和外界因素都会影响皮肤摩擦性能。内部因素包括年龄、性别、健康状况以及解剖部位等,外部因素包括滑动速度、接触物体材质、化妆品和润滑剂以及压力等。然而,日常生活中摩擦行为无法直接表征,通常需要基于仪器化的设备来模拟皮肤和物体的接触摩擦过程,进而收集实验数据达到表征目的。表征过程还必须结合皮肤摩擦的理论模型,对关键参数进行测量和确定。随着计算机技术的蓬勃发展,数值模拟方法近年来被引入,与实验和理论方法形成补充,大大提高了研究效率。因此,本文围绕人体皮肤的摩擦问题,将从解剖结构、理论模型、实验手段、数值仿真以及影响因素等多个方面介绍其研究进展,最后提出一些有趣的讨论和未来研究方向。
1 人体皮肤的解剖结构
1.1 结构特征
皮肤是人体最大的组织器官,起到保护内部组织和器官的作用。它由3 个主要部分构成:表皮层、真皮层和皮下组织,如图1 所示[21]。这些组织主要由细胞外基质构成,其体积占比非常显著,约占皮肤总重量的75%。此外,不同组织内其他组分存在较大差异。皮肤每一层微观结构都不相同,并且有着独特的结构和特性,共同发挥着保护、感知、调节体温和维持身体完整性等重要功能。
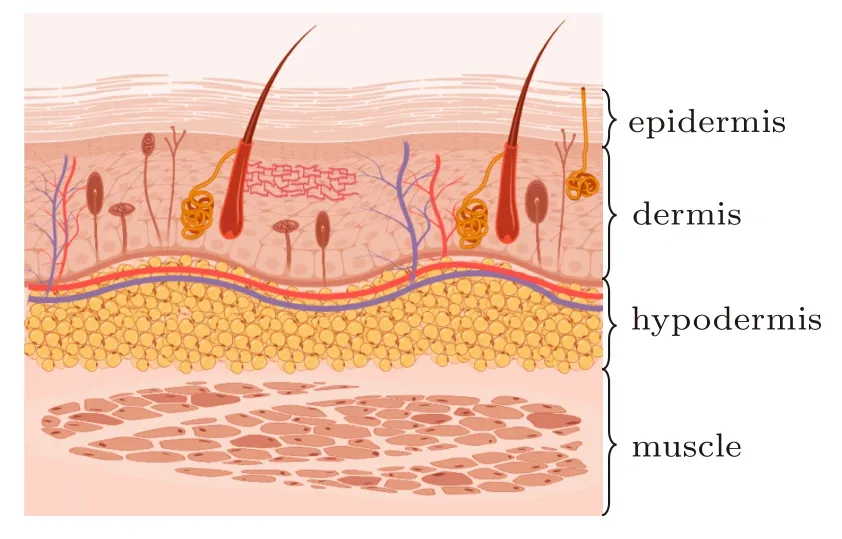
图1 皮肤的解剖结构Fig.1 The anatomical structure of human skin
表皮层是皮肤的最外层,最薄处为眼睑区域,其厚度约为0.05 mm,手掌和脚掌处较厚,甚至能达到0.80~1.50 mm。该层从外到内的组成为:角质层、透明层(仅分布于手掌和脚掌)、颗粒层、有棘层和基底层[22-23]。基底层包含了不断分裂的基底母细胞、影响皮肤免受紫外线辐射的黑色素母细胞和少量作为软触觉传感器的Merkel细胞[24-26]。有棘层主要由4~8 层带棘突的多角形细胞构成,为基底层提供必要的营养成分。颗粒层含有2~3 个细胞层,不断分泌脂质和蛋白质到细胞外空间,形成一个疏水的脂质包膜作为皮肤的主要机械屏障。角质层位于皮肤最外层,直接和外部环境接触,主要由约20 层坚硬、扁平、无细胞核的死亡细胞组成。尽管角质层厚度仅10 μm 左右,但其在皮肤摩擦性能中发挥着关键作用[27-28]。表皮层具有防止水分流失和外界物质侵入的作用,并参与调节体温,其微观结构和摩擦性能在抓握物体和皮肤接触过程中具有重要的作用。
外力作用下真皮层的力学性能极其关键,真皮层厚度为表皮层的数十倍,眼睑厚度约为0.60 mm,背部、手掌和脚掌厚度约为3 mm。真皮层主要由两层组成,乳头层位于浅层,其特点是厚度薄且纤维细密,内含丰富的毛细血管、淋巴管、神经末梢及触觉感受器等;网状层位于深层,较厚且纤维粗大交织成网,并含有较大的血管、淋巴管及神经等。真皮层主要由纤维状蛋白质、基质和细胞组成[29-31]。其中,胶原蛋白(占真皮层的80%~90%)和弹性蛋白(3%~6%)是提供皮肤优异力学性能的主要成分。由于纤维状蛋白质的存在,真皮层通常被看成正交各向异性或者是纤维增强材料。此外,真皮层含有大量的毛细血管以及较大的动脉和静脉血管,这些血管含有大量的血红蛋白,同样影响着皮肤的宏观力学性能。
皮肤最内层是皮下组织[23](一些研究不将其视为皮肤的一部分),其主要成分是脂肪细胞,中间含有丰富的血管、淋巴管、神经和表情肌。其厚度在不同部位存在显著的差异,例如在臀部和大腿等区域相对较厚,而在手腕和脚踝等区域相对较薄。这种厚度差异是维持皮肤整体弹性和形态的重要因素之一。
1.2 生理学特征
皮肤中分布着大量的触觉感受器以感知外界环境的复杂变化。例如,人类指尖每平方厘米触觉感受器数目高达240 个,整只人手存在超过17 000 个感受器,如图2 所示。这些触觉传感器主要包括4 种类型[32-34]:①慢适应感受器I 型(SA I)传入,以Merkel 细胞结束,其对外部刺激的响应频率为1~16 Hz,对低频振动和精细触觉敏感;②快适应感受器I 型(FA I)传入,以Meissner 小体结束,其响应频率为3~60 Hz,对静态皮肤压痕不敏感,但能较好地识别皮肤动态变形;③快适应感受器II 型(FA II)传入,以Pacinian 小体结束,其在很宽的频率范围内(40~500 Hz)响应,对压力和高频振动反应非常敏感;④慢适应感受器 II 型(SA II)传入,终止于Ruffini 末梢,可以在非常低的频率范围内(一般为几赫兹)被激发,对皮肤拉伸敏感。这些触觉感受器在位置、形态、功能上各不相同,感知外部刺激时发挥着不同的作用,一些对变形敏感(静态触摸),另一些对运动导致的振动敏感(动态触摸),共同构成了人体复杂而高效的触觉系统。Merkel 细胞和Meissner 小体位于皮肤浅层,Pacinian 小体和Ruffini 末梢嵌入更深。Merkel 细胞主要分布在真皮层中,并有少部分分散在表皮层。真皮层不仅分散着Merkel 小体,还有其他3 种触觉感受器。Meissner 小体接近表皮层,长度为30~140 μm,直径为40~60 μm,呈椭圆形,椭圆短轴平行于皮肤表面。压觉感受器的Pacinian 小体也存在于皮下组织中,与深部感觉有着密切关系,对瞬时刺激非常敏感。
2 皮肤的摩擦性能的研究方法
2.1 摩擦理论
早期研究发现皮肤与其他物体的摩擦满足库伦定律[35]。库仑摩擦定律是指两个表面之间摩擦力F跟表面的接触面积无关,而与作用在摩擦面上的正压力FN成正比,斜率被定义为摩擦系数µ,是评定摩擦性能的重要参数,表达式为
目前库伦摩擦定律在织物舒适性研究方向仍然应用广泛[36-37],例如,Morrow[38]采用摩擦系数μ来表征织物和皮肤之间的摩擦特性。随着研究的不断深入,皮肤类软材料表现出显著的非库伦特性,越来越多的学者尝试基于临界剪切应力τ 和接触面积A共同确定界面摩擦力[39]
该模型主要考虑摩擦过程中的黏着特性。对于软材料,Greenwood 等[40]认为变形损耗在摩擦过程发挥着较大贡献,不能忽略。Bowden 等[41]经过大量的实验研究,建立了较完善的两项摩擦理论,对于现代摩擦学理论发展具有重要意义。该研究认为摩擦力F可以表示为黏着分量Fint和形变分量Fdef的总和
皮肤同样表现出大变形和黏弹性特性,Adams等[42]将两项摩擦理论用于皮肤,确定了皮肤和压头之间的摩擦系数。其中,黏着机理被认为是人体皮肤摩擦的主要因素,而变形机理被认为起着次要作用[42-43]。一些研究推导了黏弹性材料的二维接触理论,例如圆柱/平面的滑移和滚动模型[44-49]。这些模型无法解释三维摩擦现象,例如手指和物体之间的摩擦问题[50]。基于此,科研人员开始致力于提出能够用于各向同性以及各向异性材料的三维滑动和滚动的摩擦理论[40,51-56],尽管目前相关模型仍不完善。
研究皮肤的摩擦问题时,接触面积的确定非常关键。对于球形/平面三维接触问题,接触面积A对法向载荷的依赖性可以用Hertz 模型[57]描述
式中,E∗为两种材料的等效弹性模量,R为球形压头半径。然而,Hertz 模型是在线弹性小变形假设条件下建立的,在描述皮肤类软材料的大变形响应时可能会产生较大偏差。Sneddon[58]推导了考虑几何非线性的接触理论模型,其结果与软材料实验结果更为接近。Derjaguin 等[59]认为接触区域外固体表面存在黏着力,提出了Derjaguin–Muller–Toporov(DMT)接触理论,接触面积A可以写成
式中,Fadh为黏着力。与DMT 理论不同,Greenwood 等[60]和Johnson 等[61]忽略了接触区域外的黏附行为,而是考虑接触区域内的黏着力,认为接触边缘的弹性应力是无限大的,提出了经典的Johnson–Kendall–Roberts(JKR)接触模型
Maugis[62]将接触区域外的黏着力表示为阶跃函数,给出了介于JKR 和DMT 模型的过渡解。Hertz 模型、JKR 模型以及DMT 模型等都被证明在一定程度上能够研究皮肤和球形压头的接触问题[63-66]。然而,这些研究通常假设接触区域为圆形,实际上由于这些材料“小载荷,大变形”的力学特性,摩擦过程中会出现面积缩减、接触各向异性等效应。为了考虑这种不规则接触形状,逐渐发展了基于断裂力学[67-70]和有限变形[71]方法的摩擦理论模型。
上述摩擦和接触理论主要用于动摩擦阶段皮肤类软材料摩擦行为的研究,而针对静摩擦的理论模型非常少。Deladi 等[72]和Barquins[73]建立了橡胶–金属材料的静摩擦模型,能够描述软材料摩擦过程中的黏滑现象。Sahli 等[74]提供了一种全新思路,基于实验结果给出了一个经验公式来描述静摩擦阶段面积随着切向力的演化规律
式中,A0为F=0 时的初始接触面积,α为拟合参数。
这些接触模型主要针对均匀区域的理想模型,而真实的人体皮肤表面是粗糙的。由于个体和解剖部位的差异,人体皮肤的粗糙度在10~200 μm范围内变化。粗糙表面实际上是由大小不一的微凸体组成,接触通常认为是发生在这些微凸体上,导致真实接触面积与理论值相差较大。基于此,近年来学者们提出了一些粗糙表面的接触模型,旨在更真实地模拟接触状态[75-79]。Greenwood等[80]将两个粗糙表面的接触等效为1 个光滑的刚性平面和1 个粗糙表面的接触,提出了基于统计的Greenwood–Williamson(GW)接触模型
式中,σs和R∗分别是微凸体高度分布的标准差和曲率半径平均值。该模型为研究粗糙表面之间的接触理论奠定了基础,至今仍被广泛接受和应用,同样也适用于皮肤的接触模型[81]。值得一提的是,式(7)对应的静摩擦模型对于粗糙表面的接触问题依然成立[74]。
由于表面纹理的影响,皮肤摩擦还表现出与时间相关的特性。1925 年,Katz[82]同时考虑粗糙纹理的“空间感”和精细纹理的“振动感”,提出了皮肤触觉感知的双工模型[83-84]。由于人类皮肤与物体表面接触过程中表面纹理与振动信号功率谱之间关系密切,一些学者基于摩擦力和振动信号的响应规律,提出了考虑摩擦振动的动力学模型[85-86]。除了表面纹理外,摩擦过程中速度和刚度[87]、扭转刚度和角速度[88]、接触应力和拓扑[89]、阻尼[90-92]导致的黏滑现象[93]同样会引起振动。
2.2 实验方法
皮肤作为一种活体组织,在机械力下会做出反应和适应,例如产生汗液、释放生物标志物,甚至产生水泡或伤口。皮肤这种特殊的摩擦特性依赖于个人特征和解剖特征。由于皮肤相互作用的复杂性,许多潜在的物理机制仍有待发现,实验研究对于理解皮肤摩擦学非常关键[94]。本文主要从相对运动类型和应用范围对现有的实验设备和技术方法进行介绍。
2.2.1 相对运动类型分类
自20 世纪60 年代,随着各行各业对皮肤摩擦行为研究的高度关注,学者们发展了各种各样的实验方法来评估皮肤的摩擦行为。按照皮肤和摩擦设备的相关类型可以分为4 种,分别是:滑动、扭转、滚动以及自驱动[27],如图3 所示。
(1)滑动。滑动是摩擦学中最常用的概念,通常通过控制不同材料和不同形状的压头进行线性运动或者往复运动滑过受试者皮肤实现加载,如图4(a)所示。皮肤与物体接触时,往往通过滑动行为来感知物体,是生活中最常见的一种形式,包括皮肤与织物舒适性评估、手与物体抓握行为等。Naylor[95]设计了一台恒定速度和恒定垂直载荷的摩擦仪,能够连续记录加载过程中的摩擦力,是最早表征皮肤摩擦性能的学者之一。微摩擦仪[96]能够控制加载速度和幅值,广泛应用于研究皮肤的摩擦问题。Asserin 等[97]开发了一种通过不同质量的圆盘获得法向载荷、电机驱动获得切向载荷的摩擦装置,实现了活体皮肤摩擦力的精确定量测量。Morales-Hurtado 等[98]采用特温特大学设计的真空黏合剂和摩擦仪在离体皮肤上进行了一系列拉脱和摩擦测量,阐明了不同条件下(干燥、湿润以及油性)黏附作用对摩擦系数变化的影响。李宏凯等[99]研发了一种便携式的摩擦性能测试仪,能够提供0.2~2.0 N 的法向压力和10~60 mm/s 的滑行速度。Flynn 等[100]研制了新型力敏微型机器人,可以得到皮肤法向和任一方向切向滑移下的力–位移曲线。Inoue 等[101-103]开发了含双轴力传感器的摩擦装置,能够精确控制加载速度,以表征皮肤与不同硬度人造皮肤的摩擦系数。由于活体皮肤并不是理想平面,Wyder–Hodge 等[104]提出了一种便携式手持摩擦仪,能够同时得到皮肤摩擦力和表面形状,结合曲率校正技术估算了曲面上法向力和切向力,减少了由于表面形状差异导致的摩擦测量误差。Temel 等[105]发展了一种新型的摩擦测试装置,能够测量皮肤–纺织品的相互作用力。以Fagiani 等[106]为代表的学者,借助加速度传感器测量了人手指尖触摸含硬质栅栏表面物体的振动信号,并对振动信号进行傅里叶频谱变换,探究了振动谱谐波最高峰所在频率、谐波最高峰幅值与物体表面粗糙度之间的关系。研究表明,随着表面粗糙度的增加,谐波最高峰所在的频率逐渐减小,而谐波最高峰幅值逐渐增大。

图4 典型人体皮肤摩擦装置[81,105,126,130]Fig.4 Typical friction device of human skin 81,105,126,130]
尽管研究人员设计了各种各样的装置来表征皮肤摩擦性能,但由于压头遮挡,传统的摩擦装置无法获得接触区域的详细信息[42,107-108]。各种实验手段逐渐被用于测量压头和皮肤类软材料之间接触区域的形状,主要包括直接法和间接法[109]。接触电阻测量是一种典型的间接测量方法,但其精度不高,已经无法满足目前的研究[110-111]。近年来,光学方法作为一种直接检测接触的方法得到了快速发展,其测试系统主要分为两类。一类方法是要求材料透明[112-113],然而这种方法仅限于研究透明材质仿生皮肤的摩擦问题,无法直接应用于人体皮肤。另一类方法是使压头透明,获得摩擦过程中接触区域的变化[114-117]。Sahli 等[74]将压头设计为平整光滑的玻璃板,采用工业相机透过玻璃板进行实时拍摄,能够获得仿生皮肤和手指皮肤二维接触区域的变化。为了同时获得法向和切向载荷以及三维(3D)接触区域的面积,Johannes 等[118]提出了一种基于显微压痕的可视化系统,将荧光微球嵌入压头和水凝胶样本中,通过对压头和水凝胶表面进行荧光成像来实现接触面积的测量。Guan 等[119]对压痕装置进行了改进,对接触区域进行可视化,同时获得了压入和滑移方向的力位移曲线和高分辨接触图像。Delhaye 等[117,120]设计了一个摩擦机器人对滑动过程中手指和光滑透明玻璃之间的接触表面进行成像,基于此测量了接触区域皮肤的应变。近年来,墨水印刷、光学相干断层扫描和数字图像相关等方法逐渐被用于皮肤与接触物体表面摩擦行为的研究[121]。
(2)扭转。该方法旋转轴垂直于皮肤表面,如图4(b)所示,通过测量探头保持恒定角速度时所需的扭矩研究皮肤摩擦问题,例如临床中皮肤活检的钻孔技术以及皱纹的产生等。基于扭转的测量装置缺点是无法评估皮肤的面内各向异性。El-Shimi 等[122]使用高度抛光的不锈钢圆盘和半球形探头,研究了活体状态下干燥皮肤和水润皮肤的摩擦性能,发现在旋转过程中皮肤表面会产生“起皱”或“扭曲”,并且较高法向载荷下更为明显。Hendriks 等[81]采用聚四氟乙烯压头开发了一个便捷式的旋转环式原位测量装置,获得不同身体部位的摩擦力,基于测得的摩擦扭矩确定了摩擦系数。Du Bois De Dunilac 等[123]定制了能够控制法向力和旋转速度的扭转装置,配备光学装置以实现接触表面的实时原位成像,在此基础上研究了7 名成年受试者(4 名男性)右手食指纯扭转下的表面皮肤动力学行为。
(3)滚动。该方法旋转轴平行于皮肤表面[124],如图4(c)所示,在测量皮肤摩擦行为中应用较少。然而这种类型的摩擦在日常生活中非常常见,例如体操运动员手部和单杠之间的接触、按摩仪器的运动过程等。Highley 等[125]设计了一种基于旋转摩擦技术的实验装置,通过压头在皮肤表面平行旋转实现加载,驱动实验装置不同方向上连续运动并实时测量数据,进而研究皮肤的面内各向异性。Veijgen 等[126]设计了一个法向和速度均可控可变的小型手持式便捷摩擦装置,能够获得不同皮肤区域的摩擦数据。
(4)自驱动。该方法需要人为控制皮肤与装置发生滑动或者扭转摩擦,采用传感器记录这个过程中的摩擦力和变形来研究皮肤摩擦行为,如图4(d)所示。日常生活中,人类主动触摸感知外界变化通常都是采用该方法。Masen[127]提出了一种含6 自由度传感器的触觉摩擦实验方法,该方法要求受试者在传感器上移动食指获得摩擦过程中的实验数据集。Derler 等[128]分别使用三轴测力板和压敏膜测量了实验过程中摩擦力和接触面积,研究了法向载荷对皮肤–玻璃摩擦行为的影响。Arakawa 等[129]要求受试者通过手指按压和滑动来探索接触物体,采用心理和物理实验相结合的方法评估接触材料柔软度。Lee 等[130]基于光学相干层析成像系统对接触区域进行可视化,研究了手指在不同几何形状凹槽上滑动时的形态变化。
2.2.2 研究领域分类
皮肤摩擦学的应用领域非常广泛,包括化妆品和护肤品[131],与皮肤状况、老化、皮肤损伤、伤口愈合和假肢相关的皮肤病学问题[132],医疗和运动[133-135],纺织品[136-138],触觉、触摸特性[139-140]和人体工程学等[1,141]。摩擦系数本身不是一种材料属性,而是一个系统参数[127],这意味着它取决于两种接触材料的组合,因此本节将根据应用领域进行分类,介绍皮肤摩擦性能的相关研究进展。
(1)护肤品领域。护肤品往往通过改变皮肤表面粗糙度和含水量形成湿润、柔软以及光滑的触感。使用护肤品后,皮肤表面的摩擦和黏附性能发生显著变化,成为评估护肤品使用效果最直接的方法之一[43]。通过测量摩擦特性来研究保湿剂以及磨砂霜等护肤品使用效果已经取得了长足的发展[142]。Ramalho 等[143]开发了能够控制法向和切向载荷的摩擦装置,通过测量自然状态、洗涤状态、乙醇冲洗、凡士林以及甘油作用下皮肤摩擦力,评估了保湿剂对皮肤摩擦行为的影响。为了对化妆品进行感官评估,Egawa 等[144]采用摩擦分析仪测量了表面摩擦特性(摩擦系数和平均偏差),发现摩擦特性与感官评估之间存在相关性。
(2)纺织材料领域。纺织品具有粗糙表面和复杂机械行为,是人类生活的必需品之一[145]。皮肤–织物的接触和摩擦行为直接决定该产品的舒适性,在织物生产过程中应尽量避免织物与皮肤接触摩擦导致起泡和疮伤等。1986 年,Gwosdow等[146]采用弹簧秤记录了不同织物划过志愿者前臂内侧皮肤的摩擦力,研究了温湿环境下摩擦对织物质地和舒适性感知的影响。之后,Kenins[147]使用拉力计拉动搭在人体前臂或食指上的织物,分析了不同织物纤维类型、表面形貌以及克重对皮肤–织物摩擦行为的贡献。Kondo[148]对KESSE 摩擦测试仪进行改进,测量了人体皮肤与织物之间的摩擦系数,发现摩擦系数随着角质层含水率的增加呈指数型增长。织物–皮肤界面内的汗水会增加摩擦力,引起黏性感,并加剧穿着不适。为减少摩擦并提高穿着舒适性,Fang 等[149]采用含三轴力传感器的摩擦装置和脑电设备系统地研究了织物–皮肤的摩擦行为和湿织物黏性感知中的认知机制。Baussan 等[150]开发了一种往复式线性摩擦仪,能够测量跑步过程中仿生皮肤(人造革)和运动袜之间的摩擦接触行为。Camillieri 等[151]将往复式织物摩擦计和触觉摩擦仪相结合,研究表明手指形态和力学性能的改变都会影响皮肤–织物摩擦性能。Temel 等[152]开发了便捷式的手持摩擦设备,测量了皮肤–织物的摩擦系数,发现局部皮肤温度与摩擦系数呈正相关。总之,通过引入各种实验装置,能够评估包括纤维材料、纱线设计、表面结构和织物结构在内不同特性织物的舒适性[153-157]。目前,学者们已经开发了许多实验装置和方法来研究皮肤–纺织材料的摩擦行为,对新型织物的开发和设计发挥着重要的作用,可详见国内外相关综述文章[136-138]。
(3)医疗领域。一方面,摩擦特性能够反映皮肤表面的物理和化学性质,有助于研究个体皮肤病病变和疮伤的形成和康复。Lodén 等[10]采用带振荡钢板探针的摩擦装置非倾入性地测量了特应性皮炎患者和健康志愿者之间的摩擦力,对比发现健康志愿者的摩擦力更高,实现了基于摩擦性能的皮肤病评估和诊断。Li 等[158]采用往复式医学微型摩擦仪研究了依次遭受创伤、康复和自我适应过程中兔子皮肤的摩擦行为。在之后的论文中,他们发现摩擦疮伤和康复过程中,前20天摩擦系数降低,20 天后增加,27 天后达到稳定阶段[132]。另一方面,医用手套、假肢等医疗设备和医护用品的开发同样依赖于皮肤的摩擦性能的表征[159]。Carré等[160]提出了一种能够感应振动的摩擦测试装置,研究了使用医用手套对皮肤触觉探索的影响。Henao 等[133-134]设计了一种新型的手持式摩擦仪,通过电机扭矩评估摩擦力,确定经股骨截肢患者假肢和残肢之间的摩擦系数。
(4)触觉感知。尽管物体的表面特征(表面纹理、颗粒感、黏着度)、空间特征(形状、体积)、材料属性(软硬度、密度、黏度等)均不相同,人类皮肤仍然能够依靠触觉感知能力实时反馈调节,进而识别、抓握和操纵各种物体。人类皮肤能够通过触摸和滑移分辨氟化烷基硅烷(分子直径为0.206 nm)和硅羟基(分子直径为0.203 nm)这两种单分子层的差别,皮肤接触和摩擦行为在其中起着极其重要的作用[161-163]。Li 等[164]使用UMT-Ⅱ摩擦仪测量了不同法向力下(0.2 ~1.0 N)皮肤的摩擦系数,结合生理监测仪器确定了皮肤电导、温度和脑电图等生理信号,共同探索摩擦系数和舒适度的相关性。Cesini等[165]和Massi 等[166]为了明晰手指滑动过程中与振动相关的触觉感知机理,设计了一款Tribotouch摩擦仪,该摩擦仪能够测量和再现摩擦力以及摩擦引起的振动。Klöcker 等[167-169]开发了能够预定义法线、切线、旋转方向速度和位移的实验装置,发现表面特性(即摩擦力波动和净摩擦)与其舒适度存在显著相关性。之后,该团队还结合高保真摩擦调制超声波设备,实现指尖的受控摩擦[170-171]。Skedung 等[172-174]设计摩擦装置时引入了三分量压电力传感器和电荷放大器,研究了摩擦性能、表面粗糙度和触觉感知之间的关系。Chimata 等[175-176]采用接触式轮廓仪和三轴测力计,研究了表面纹理特征、摩擦性能对皮肤触觉的影响。Tanaka 等[177]利用振动位移传感器,测量了指尖划过不同砂纸表面时皮肤振动信号,发现砂纸颗粒越大,振动越小。皮肤摩擦在抓握以及触觉感知中起着至关重要的作用,相关研究发表和引用近年来呈指数型增长,可详见综述[139-140]。
2.3 数值仿真
皮肤是人类身体抵御外部环境的第一道防线,通过机械、电、热、生物、化学和磁等形式激励实现与外界环境的信息交换[178]。皮肤与物体接触引起的皮肤变形和振动能够感知外部环境,其关键在于深入理解人类皮肤的接触力学和摩擦行为。基于非线性有限元接触均质化程序,Stupkiewicz等[179]和Leyva-Mendivil 等[180]建立了正交各向异性的摩擦模型,如图5(a)所示,分析了接触法向力、皮肤微观结构、接触物体大小以及摩擦系数之间的关系。Leyva-Mendivil 等[180-181]基于解剖学和Abaqus 软件建立了人体皮肤的二维多层有限元模型来模拟各种尺寸压头在皮肤表面的滑动行为,如图5(b)所示。这些研究大多局限于二维模拟,实际上皮肤在三维空间中具有丰富的特征。Yoshida 等[182-183]利用核磁共振方法建立了指尖的三维有限元模型,如图5(c)所示,提出了一种结合实验和有限元的技术,分析了指尖的摩擦行为。Xing 等[15]基于有限元方法模拟皮肤摩擦起泡行为,研究了摩擦系数、磨损材料刚度、皮肤与材料之间的非线性动态接触以及起泡几何形状对起泡变形和应力的影响。Dai 等[16]建立了用于模拟足–袜–鞋垫接触的三维有限元模型,研究了不同摩擦性能的袜子对步态站立阶段动态足底压力和剪切应力的影响。Tiell 等[7]使用Adams 软件开发一个多体动力学仿真方法来模拟皮肤–袜子和袜子–传感器接口处的摩擦行为,研究了袜子刚度对皮肤剪切测量精度的综合影响。Diosa 等[184]通过创建不同几何形状的微浮雕皮肤表面模型,如图5(d)所示,在微尺度下阐明年龄对皮肤–球形压头压痕和滑动响应的影响。为了模拟皮肤大变形问题,陈思等[185]提出了一种基于有限元和光滑粒子动力学耦合算法,模拟尖刺刺入和平板摩擦仿真试验。数值方法为皮肤摩擦行为的研究提供了一种便利的手段,近年来发展迅速。

图5 几种模拟皮肤摩擦的数值模型[179,181-182,184]Fig.5 Several simulation models for skin friction[179,181,182,184]
3 人体皮肤摩擦行为的影响因素
皮肤作为一种活体材料,其摩擦行为的影响因素多种多样,为研究增加了难度。自身因素如:健康状态、年龄、性别、解剖部位以及遗传因素等。外界因素如:湿度、温度、护肤品应用等。这些因素通过改变皮肤的物化性质影响皮肤的摩擦特性。此外,实验采用的滑动速度、接触面积、法向载荷以及接触材料的材质等都会影响皮肤摩擦性能的表征。由此可见,皮肤摩擦学的研究比一般摩擦学问题更为复杂。本节从主要影响因素出发,总结和整理目前关于皮肤摩擦的研究进展。
3.1 粗糙度与表面纹理
人体皮肤的表面形貌与身体解剖部位息息相关,不同部位的粗糙度和表面纹理不同,导致其摩擦性能存在差异。由于实验设备的限制,早期研究认为摩擦系数与皮肤表面粗糙度的相关性并不显著[1,144]。随着研究的深入,Nakajima 等[14]通过轮廓测量和摩擦测量相结合的方法评估了皮肤形态和摩擦系数的相关性,发现皮肤表面粗细线条形成的图案(包括长度和深度)会影响摩擦系数。
此外,测量皮肤摩擦系数时,接触压头表面的粗糙度同样发挥着重要的作用。Hendriks 等[81]分别用材质为铝、黄铜、钢和硬质工程塑料定制了不同材质的接触压头,对脸颊和前臂开展了大量的摩擦实验,发现随着表面粗糙度的增加,摩擦系数显著降低。结果表明,坚硬物体与皮肤之间的摩擦系数随着表面粗糙度的增加而降低[128,186-187]。Derler 等[188]基于两项摩擦模型分别研究了从微米到毫米范围内的表面微观结构对足底皮肤–硬质基底滑动摩擦行为的影响,发现表面微观结构的贡献非常大。
3.2 水合作用
皮肤水合作用取决于皮肤表面的水分,水分增加通常会改变两种材料之间的黏附性能和摩擦力[189]。研究表明,潮湿条件下皮肤的摩擦系数是干燥情况下的1.5~7 倍[1,10,157,190]。El-Shimi 等[122]和Sivamani 等[191-192]均发现皮肤含水量与摩擦系数之间存在相关性。因此,一些学者尝试采用线性[193]、幂函数[14]、指数[194]以及钟形曲线[195-196]等函数形式描述含水量与摩擦行为之间的定量关系。钟形曲线行为表明,如果皮肤足够湿润,摩擦行为将从边界润滑过渡到混合润滑。Tomlinson等[196]发现最初摩擦力的增加是皮肤吸水引起的,这个过程中接触面积发生明显的增大。此外,外部环境同样会影响皮肤的含水量,皮肤与金属[81,196]、织物[147,197]和玻璃[128]等材料在非常潮湿的气候或潮湿的条件下接触时,摩擦力甚至比干燥滑动条件下高2~4 倍。这种变化可以通过黏性剪切、吸水性和毛细管黏附来解释[196]。Mahdi等[198]发现在干燥状态下皮肤变形摩擦占总摩擦的20%,在较高滑动速度和法向载荷下润滑状态变形摩擦对总摩擦的贡献甚至能达到50%。
人体皮肤和接触材料之间的亲水/疏水作用也会影响皮肤的水和作用和摩擦特性[42,154,196,199]。例如,Adams 等[42]分别用疏水性的聚丙烯和亲水性的玻璃压头在前臂皮肤上进行摩擦实验,发现使用玻璃压头的摩擦力较低,这是由于玻璃与皮肤之间形成了更稳定的润滑膜。Tomlinson 等[196]采用具有相似表面粗糙度的钢和聚丙烯压头进行实验,发现高亲水性的钢压头与皮肤之间的摩擦系数更低,得到了同样的结果。此外,在含水量和粗糙度相同的情况下,不同解剖部位皮肤的亲水性也有显著差异,这是由于富含皮脂的皮肤亲水性更强[200-201],从而表现出更高的摩擦力[199]。然而,Cua 等[193]认为皮肤皮脂含量与摩擦力之间的相关性较弱,所以皮脂对皮肤摩擦的影响有限。目前对于是否考虑皮脂仍然存在争论,之后需要更为全面的理论和实验研究充分阐明皮脂对皮肤摩擦特性的影响[1]。
3.3 加载速度
早在1963 年,Grosch[202]就发现橡胶类仿生材料滑动过程中摩擦力会随着速度的增加而增加,通过引入黏性剪切损耗可以解释这种现象。之后,Tang 等[96]将实验过程中的滑动速度从0.5 mm/s增加4.0 mm/s 得到了相似的结果,并通过能量平移示意图解释了滑动速度对皮肤摩擦特性的影响。其中,变形摩擦分量随着弹性滞后造成的能量损失增加而增大,此时“黏滑”现象也变得更明显。Johnson 等[66]使用幂律表达式描述了摩擦系数随滑动速度(0.25~33 mm/s)的增加而增加。Zhang 等[155]确定了转速从25 r/m 增加到62.5 r/m过程中的摩擦系数,发现摩擦系数与转速呈现正相关。Mahdi 等[198]使用滚动和滑动方法确定黏着和变形摩擦的相对贡献,基于损耗半径因子定量研究了滑动速度对变形摩擦的影响。
3.4 法向力
Adams 等[42]采用传统的Tabor-Eldredge 仪器配合球形压头测量了前臂内侧的摩擦力,观察到摩擦系数随着法向力的增加而降低,并采用摩擦黏附模型解释了这种现象。Tang 等[96]发现当法向载荷从0.1 N 增加到0.9 N 时,皮肤摩擦系数显著增大。研究表明黏附和变形共同决定皮肤的摩擦行为,法向力的大小会影响摩擦系数的测量。Ramalho 等[143]发现在不同法向载荷下手掌的摩擦系数变化不明显,但是手臂皮肤表现出双坡度的摩擦机制。Derler 等[128]认为不同机制(黏附、变形以及润滑)起主导作用时皮肤摩擦系数对于法向载荷的依赖性存在差异,为研究皮肤复杂摩擦机制提供了新的见解。
3.5 种族、性别和年龄
现有研究表明皮肤摩擦在不同种族之间没有显著差异[3]。但对于性别和年龄,不同研究得到的结果存在较大的差异。最初学者们认为性别和年龄对于皮肤摩擦行为没有明显影响[3,9,144,186,193,203]。Elsner 等[204]测量了44 名健康女性志愿者的摩擦系数,发现其与年龄、体重、身高无关。Gerhardt等[154]发现尽管老年人的皮肤弹性显著降低,但年龄组之间的皮肤摩擦性能没有明显差异。在该作者的另一项研究中观察到尽管女性和男性的皮肤黏弹性行为一致,然而女性皮肤的摩擦表现出更高的水分敏感性,这种效果归因于女性皮肤水合作用下形成更大的真实接触面积[197]。李宏凯等[99]研究发现,手背、手掌、前臂屈侧、前臂伸侧、前额部位皮肤摩擦系数与性别的相关性较小,但女性脸颊部位皮肤摩擦系数远大于男性。Zhu 等[190]招募了633 名志愿者,发现皮肤摩擦系数随年龄、性别和身体部位的变化而变化,并且与某些身体部位角质层水合作用呈正相关。
3.6 身体解剖位置
不同解剖区域的皮肤摩擦特性存在较大差异,在皮肤水合作用较高的区域摩擦力和摩擦系数更大。简而言之,手指、手掌和前额的摩擦系数比腹部、大腿和下背部更大[9,81,128,190,193,204-206]。樊鸣鸣等[207]测量了6 个不同解剖部位的皮肤摩擦系数,发现不同解剖部位按照摩擦系数大小排序均为:脸颊>手掌>前额>手背>手臂屈侧>手臂伸侧。Hendriks[81]研究则认为脸颊上的摩擦系数通常低于前臂(特别是在较高的环境湿度下),猜测是胡须的存在改变了其摩擦行为。尽管不同解剖位置毛发分布不同,但是毛发对人体皮肤摩擦行为影响的相关研究较少,目前仍然是一个未知且有趣的研究课题。
3.7 其他因素
Liu 等[208]使用“Cutometer”摩擦仪和光学相干断层扫描技术,研究了皮肤力学和结构特性如何影响人类手指的摩擦行为。Gwosdow 等[146]通过将8 名男性暴露在不同温度条件下,研究了温度对皮肤织物质地和舒适感(可接受性)感知的影响。Choi 等[209]采用摩擦实验研究了表面温度对电黏合的影响,发现表面温度会影响用户对电黏触摸屏的感觉,特别是在接触滑动早期阶段。
4 结语
皮肤摩擦涉及生物学、力学、摩擦学、医学以及神经科学等多学科交叉,因此强化交叉科学研究是皮肤摩擦学研究的必然选择。此外,皮肤结构非常复杂,是一种典型的不均匀材料,目前关于人体皮肤的摩擦行为研究主要集中在组织尺度,即厘米量级。为了研究不同因素对皮肤的影响,必须将皮肤放大到从百微米到几毫米的介观尺度。介观尺度下皮肤与接触物体之间的摩擦依赖于该尺度下的力学行为:不同皮肤层的力学性能、接触过程中的组织变形以及皮肤的微观结构。然而,现有研究对该尺度下的皮肤力学和摩擦行为的认知仍然较少[184]。作为活体组织,皮肤还具有自愈合、自修复的特点,其摩擦性能处于动态变化中,这种特性为对其深入研究带来了极大的困难。
由于 “低模量,大变形”的特点,在摩擦过程中皮肤随着切向力的增加产生面积缩减、接触各向异性、黏滑效应等现象,采用传统的摩擦模型已经不足以进行解释和描述[118,120,210-213]。理论方面,还需要一种考虑皮肤材料超弹性、黏弹性、各向异性以及表面粗糙的摩擦模型,完善皮肤的接触模型和摩擦理论。此外,在手与物体还没有发生完全滑移的过程中,人类就已经利用其触觉感知能力调节握力大小,防止物体脱落,提供这种早期触觉信息的物理和感知机制目前还不明确[214-215]。这主要是目前关于皮肤材料静摩擦阶段的理论模型极其匮乏。虽然存在一些模型[72-73]能够描述软材料切向力下的黏滑现象,但是由于切向力导致接触区域形状发生改变,模型的适用性存疑[216]。实验方面,一方面亟需开发能够获取大量数据的在体实验测试手段来观测和量化摩擦过程中皮肤的变形。另一方面皮肤表面含有大量的微观特征,这种特征与皮肤的宏观力学和摩擦性能密不可分。因此,为了系统研究这些特性,必须发展多尺度、高精度的实验方法以获取更为丰富的摩擦力和接触信息。
