桩腿位移量在线监测系统在海上某平台的首次应用
2024-01-23付海军
付海军
(中海石油(中国)有限公司深圳分公司,广东深圳 518000)
0 引言
桩腿位移量在线监测系统主要应用于风力发电机的风机塔筒、海上石油钻井平台的桩腿等载体的简谐运动量中相对位移量、角度量、简谐振动量及倾斜度等各类监测参数的在线健康监测,实时在线监测被测海上石油钻井平台的桩腿的水平绝对位移和相对位移及角度量。系统抗外界电磁干扰能力强、承受冲击震动能力强,能够适应各种恶劣海洋运行环境[1]。非接触式安装的优势使其具有卓越的系统集成性及安装的便利性及快速性,实时在线监测海上石油钻井平台的桩腿的相对位移及异常振动、角度变化量等。
1 系统介绍
海上石油钻井平台的桩腿受石油平台的甲板上各设备载荷自重、各种风流、冰流、波浪流、海洋流等多种复杂载荷作用,会出现一定程度的摇摆与扭曲。通过桩腿位移量在线监测系统可对桩腿的载荷、振动、倾斜、角度等物理量进行实时在线监测,及时发现桩腿的倾斜、过载、早期表面损伤等早期故障并发出警报,从而避免海上石油钻井平台的桩腿的深度损伤、失效等一系列潜在风险。
2 系统组成
海上石油钻井平台的桩腿加速度计、角度传感器的布置一般布置在各桩腿的中上部分,主要由高精度石英挠性加速度计、角度传感器及上位机及桩腿位移量在线监测系统软件两部分组成,其系统架构图如图1 所示。
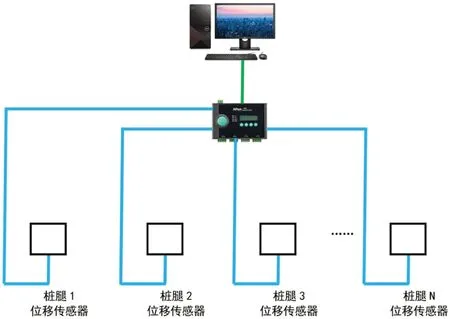
图1 网络架构图
2.1 加速度计主要参数
本体外形尺寸为73mm×65mm×25mm(长×宽×高),安装孔尺寸为62mm×54mm,孔位Φ3.4mm×5mm。加速度计主要集成高精度Mems 传感器,该传感器能够实时测量被测桩腿的加速度矢量。加速度计的设计是基于惯性导航的算法,可以对加速度信号进行实时处理。加速度计能够测量被测桩腿周期振动信号的相对位移,直接输出桩腿的相对位移量及角度量,并能够分析被测桩腿的晃动频率和幅值。加速度计的各信号可通过RS485 通讯口、标准的Modbus RTU 通讯协议传输给桩腿位移量在线监测系统或第三方系统。加速度计采用防水防爆外壳,防护等级达到IP66,防爆等级达到EXDE 2CT4,采用强磁及强力胶的安装方式。
2.2 角度传感器主要参数
本体外形尺寸为73mm×65mm×25mm(长×宽×高),安装孔尺寸为62mm×54mm,孔位Φ3.4mm×5mm。加速度计主要集成高稳定核心重力场测量模组,内置核心最优干扰滤波器,可以实时测试被测桩腿水平倾角,精度高达0.002°,温度漂移系数高达0.0002°/℃。角度传感器的各信号可通过RS485 通讯口、标准的Modbus RTU 通讯协议传输给桩腿位移量在线监测系统或第三方系统。角度传感器采用防水防爆外壳,防护等级达到IP66,防爆等级达到EXDE 2CT4,采用强磁及强力胶的安装方式。
2.3 多串口联网服务器
多串口联网服务器接头采用接线端子的方式,其串口数量可按实际需求进行选择,支持4、6、8 个端口供选择,串口支持多种标准波特率BPS,包括4800、9600、19200、38400、57600、115200、230.4k、460.8k、921.6k,其数据位可选择5、6、7、8,其停止位可选1、1.5、2,其校验位可选无、偶、奇、Space、Mark 等。多串口联网服务器采用XON/XOFF 的流量控制、2kV 光电隔离保护,其RS-485 上拉电阻和下拉电阻可选1kΩ 或150kΩ,其数据流向采用自动控制方式,并配置120Ω 终端电阻。
2.4 桩腿位移量在线监测系统软件
客户端运行环境支持linux、Ninux 操作系统,支持Ubuntu Kylin。客户端要求运行内存≥6G,CPU ≥1MHz,存储空间≥1T。桩腿位移量在线监测系统软件是由服务端和客户端组成的 C/S 结构系统,可以实现现场传感器的数据采集,无延时、稳定可靠的监测和预警,能够将专业的数据图形化,实现历史数据查询、参数分析、报表生成等功能。
桩腿位移量在线监测系统软件基于定位定向技术,弥补了传统的监测方案存在的不足,实现了桩腿位移量及角度变化量的智能监测及预警[2-4],创新了桩腿的安全监测及保障方式,强化了桩腿的安全运行监督,优化了桩腿的安全运行方式。实时的监测桩腿位移量及角度变化量,完成加速度计及角度传感器的Slave 地址分配、初始值校准、位移量及角度变化量的显示及曲线趋势、预警及报警等综合管理,由此得出桩腿的位移量及角度变化量,系统具备丰富的图谱显示功能,主要功能包括实时测量位移量和角度变化量、Slave 地址分配、初始值校准、报警阈值设定、报警显示、曲线趋势呈现、日志查询等。
3 系统性能
3.1 测量内容
位移传感器可记录3 个位置信息,即X 轴、Y 轴、Z 轴位移。角度传感器可以记录3 个角度信息,即X 轴、Y 轴、Z 轴倾角。位移传感器和角度传感器自带报警信息收发功能,带毫秒级的SOE 事件记录,并支持北斗发报文进行报警。
3.2 系统特点
系统可以直接输出被测桩腿的相对位移量、角度量,通讯方式支持多种波特率及输出频率,系统可以获取北斗卫星信号,系统的冷启动搜星时间不超过60s,可秒级解算GPS 数据和六自由度运动信息,其位置解算频率精度不低于2Hz,姿态结算频率精度不低于200Hz。系统具备频谱图实时解算,其原始数据存储量大于20G。系统也可以支持单模和多模光纤数据传输,且单个传感器功耗小于20W。
3.3 系统性能指标
相对位移测量精度为水平X 方向达到5mm+4%,相对位移测量精度水平Y 方向达到5mm+2%,相对位移测量带宽为0.1 ~4Hz,水平姿态测量精度达到0.1°,角度传感器测试精度达到 0.1°。系统的采样频率高于50Hz,其更新频率为1Hz。水平加速度测量精度达到600ug,水平振动加速度测量带宽达到100Hz;系统开机首次搜星锁定时间小于60s,系统运行状态搜星锁定时间小于20s,通信能力达到每分钟70 字节。
3.4 系统优势
系统采用全光探测,不受电、磁、气等的干扰,可进行长期稳定测量,系统无零点漂移,无需再进行二次校准。系统设备数量少、集成度高、通讯接口少、安装施工简单,具备低成本、实时性好、价比高、生命周期长、后期维护量小的优势。
4 系统功能
桩腿位移量在线监测系统采用数字化、智能化、无人化的智能运维思路,依托加速度计测量桩腿的位移量、角度传感器测量桩腿的角度量,对采集的桩腿的位移量、角度量等数据进行智能分析和识别。依托高精度、高可靠性、高性能的加速度计测量海上石油钻井平台的桩腿的简谐运动、加速度矢量、角度变化量,实现海上石油钻井平台的桩腿的位移量、角度量早期故障的识别。根据海上石油钻井平台的实际情况,结合海上石油钻井平台的桩腿的制造、运输、安装和海洋运行环境下的历史数据建立人工智能训练识别数据库,通过人工智能训练识别数据库和大数据故障库,从而实现高性能边缘计算处理单元对海上石油钻井平台的桩腿的位移量、角度量进行智能故障预警及告警[5-7]。为方便海上石油钻井平台的相关电气专业人员可以直观、快速查看桩腿位移量、角度量的实时数据,桩腿位移量在线监测系统实时数据量结合数据波形的方式将桩腿的位移量、角度量实时显示在客户端的主画面上。桩腿位移量在线监测系统根据当前桩腿的实时健康状态,以系统整体可靠性最高及总体检修成本最低为最终优化方向,通过将定期检修检查转换为状态检修检查的方式,减少海上石油钻井平台桩腿过检、漏检的情况。
桩腿位移量在线监测系统采用高精度、高可靠性、高性能的加速度计和角度传感器,不同于传统电信号传感器,不受电磁及海洋环境的干扰,数据传输高效可靠、数据传输损耗小,在恶劣的高腐蚀、高浸泡的海洋环境下仍能正常使用,且正常使用寿命可达20 年,弥补了一般电信号传感器需要半年或一年进行零点标定及校订的缺点。桩腿位移量在线监测系统主监控画面如图2 所示。

图2 监控系统主画面
5 结语
该平台通过桩腿位移量在线监测系统,打破了传统桩腿信息孤岛的方式、解放了海上石油钻井平台的电气专业人员的人力和工作时间,通过分类采集海上石油钻井平台桩腿的加速度计、角度传感器等实时数据,自动完成从数据采集到数据分析、数据判断、输出结果的全分析和全判断过程,采集和监测海上石油钻井平台桩腿的X 轴、Y 轴、Z 轴绝对位移量,X 轴、Y 轴、Z 轴倾角量等参数,从而实现海上石油钻井平台桩腿状况的智能化监测和管理,缩短海上石油钻井平台的电气专业人员员查找故障点的时间,提高查找故障点的工作效率,将常规的定期检修提升到状态检修,减少检修时间。
