某极地科考船科考收放系统设计
2024-01-22罗志农巫振汉
罗志农,巫振汉
(广东广船国际海洋科技研究院有限公司,广州 511457)
1 前言
某极地科考船能够满足无限航区和南北两极海域航行、科学调查作业以及绿色环保要求;能够携带国产化的“深海勇士”号、“奋斗者”号等载人潜水器进行极区载人深潜;配备国际先进的极区海洋科学综合调查设备,在环境调查方面能够承担极区大气、水面、海冰、水体、底质等综合调查观测研究任务,具备有关气候变化的海洋环境综合观测取样能力,并可开展极区深海资源调查;具有全海深全海域特别是极地水域航行和科考的特点;能够布放回收载人潜水器、水下缆控潜水器(ROV)、水下无缆自主机器人(AUV)、自动采水系统(CTD);可测量海水温度、深度、盐度;配备了深海绞车、艉门架、舷侧门架、月池系统等科考收放设备和系统。
2 绞车设计
2.1 绞车选型
按照本船的功能需求,需要配置CTD 绞车、地质绞车、ROV 绞车、光电缆绞车。本船配置了先进的变频电动科考绞车系统,其主要功能如下:
1)自动/手动排缆、收缆/放缆方向控制;
2)绞车无级调速、应急停止;
3)缆绳张力、速度、长度检测及报警等信息实时显示;
4)本地操作+远程线控;
5)缆绳清洁及绞车摄像;
6)远程故障诊断。
各绞车选型要求如下:
1)绞车缆长可支撑全海深科考作业;
2)满足地质取样器等的承重要求;
3)尽可能减少绞车数量,可考虑兼用;
4)各绞车安全工作负载,应满足尽可能多规格的收放设备的需求。
绞车选型如下:
1)CTD 绞车1 套,变频驱动,牵引式,缆长10 000 m,安全工作负载6 t;
2)地质绞车1 套,变频驱动,牵引式,缆长13 000 m,安全工作负载30 t;提供承重眼环,收放设备通过承重眼环与缆相连接;
3)光电缆绞车1 套,变频驱动,牵引式,缆长6 000 m,安全工作负载25 t,光电缆绞车兼作ROV绞车。
2.2 绞车布置
考虑绞车系统在极低气温下的安全可靠运行,所有绞车采用集成埋舱方式布置在绞车间;绞车系统的布置应考虑绞车排缆走缆的便利性、绞车维护操作的便捷性,同时兼顾海上作业转换的高效性。
绞车间布置图,如图1 所示。
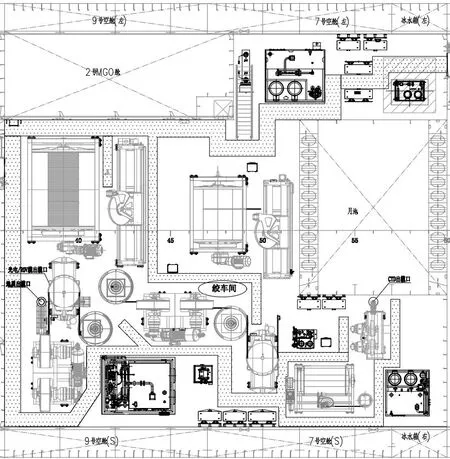
图1 绞车间布置图
3 门架设计
3.1 艉门架
本船露天作业甲板艉部设置一台液动门架,可用于载人潜器的收放操作,并可服务于光电缆和地质纤维缆。该门架设置了2 个滑轮吊点,右舷滑轮吊点兼顾光电缆和地质纤维缆的布放;配置了无线便携式操控板用于本地操作,也可在艉操控室操作。
按照全海深载人潜水器“奋斗者”号的重量,再加上潜水器导接头的重量并留一定余量,艉门架的工作负荷定为100 t;左舷滑轮吊点设计用于未来其它深海装备的收放,其安全工作负荷尽可能大,为50 t,以适应重型深海装备。艉门架布置图,如图2 所示。
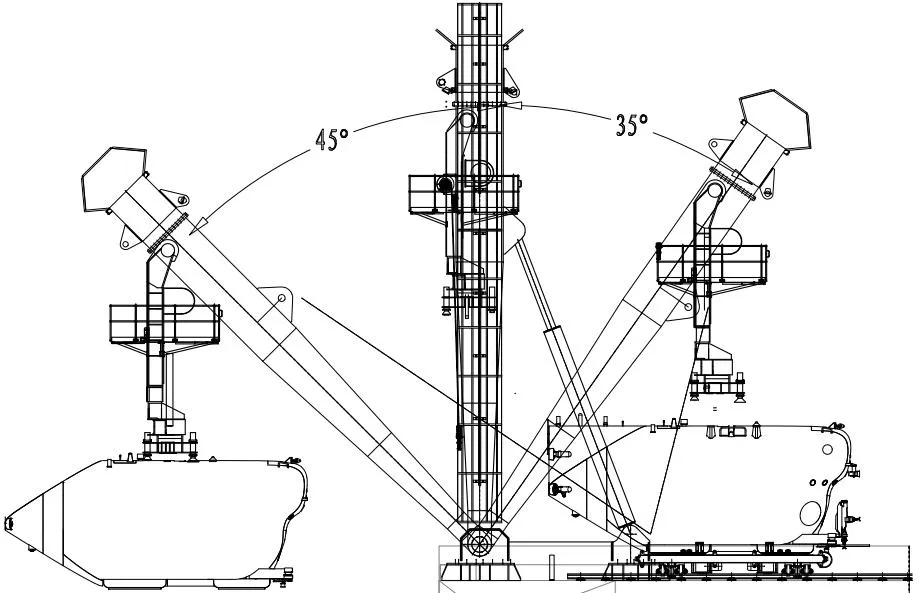
图2 艉门架布置图
3.2 舷侧门架
潜器间旁艉部作业甲板右舷设置一台ROV/CTD 共用A 架,其工作负荷为20 t,用于ROV 和CTD 系统的收放等工作;A 架配置ROV 导接头和CTD 吊点滑轮,按照兼容超大重型ROV的要求,参考国内外ROV资料,最大重量约为5 t,再加上中继器、导接头重量并考虑恰当余量,舷侧门架安全工作负载定为20 t;按照兼容多层大型CTD 的要求,参考国内外CTD 资料,CTD 吊点滑轮安全工作负载定为6 t。舷侧门架布置图,如图3 所示。
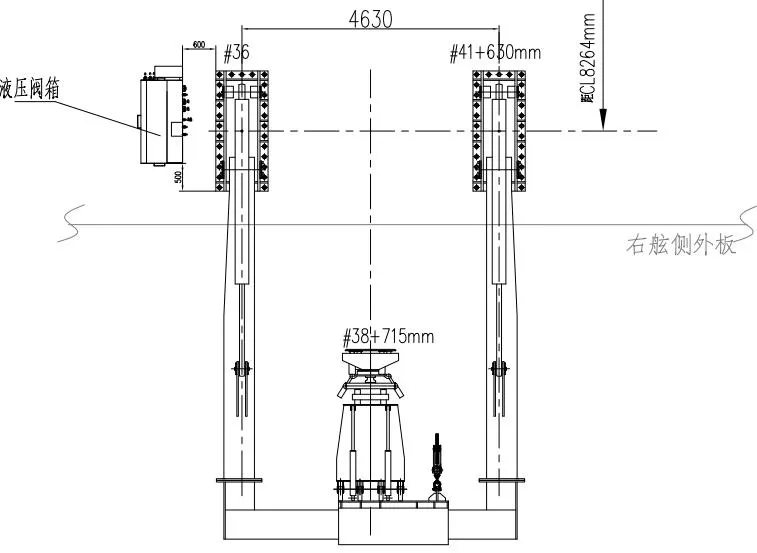
图3 舷侧门架布置图
4 月池系统设计
月池系统主要包括:收放系统;舱盖系统;操控系统。月池系统可配合ROV 绞车及CTD 绞车等,进行ROV、CTD 收放等科考作业;也可通过月池收放其它科考设备和仪器,如搜寻探查型 AUV、水下吊车等。
4.1 月池系统配置
月池系统的配置,见表1。
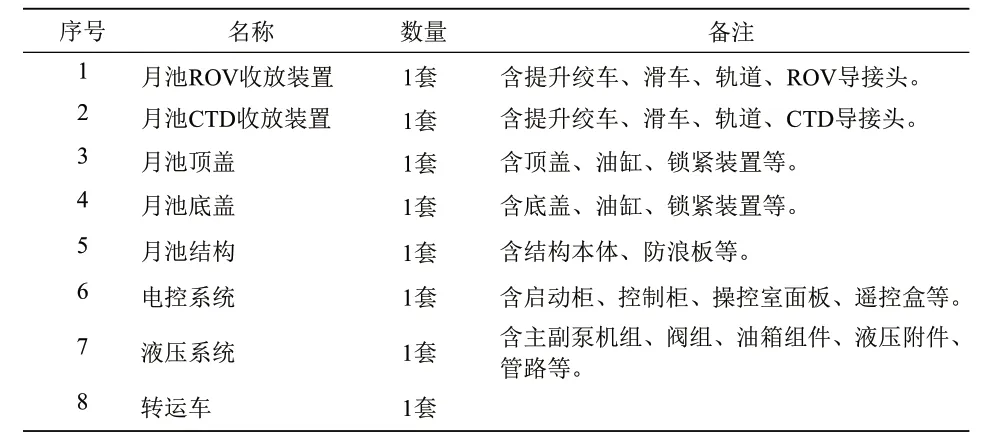
表1 月池系统配置
为了可收放所有型号的ROV 以及大型科考设备,月池净开口越大越好。但是大开口会对船体总纵强度造成损害,同时对船体的横向强度及刚度都有显著的影响,并且结构设计需要满足5 级海况开启月池及科考作业的安全性。所以在保证船体安全满足规范的情况下,通过有限元及3D 建模CFD 对结构进行优化,考虑船体结构设计安全、设备作业需求、现场施工方便等要求,使设计更加合理;同时,结合船舶布置空间的限制,本船在船中#52~#60 设置月池结构,月池由主甲板通往外板,月池围井尺寸为6.4×7.6 m,净开口尺寸为4.8×6 m。
开口尺寸为4.8×6 m 的船底外板对于航速影响极大,因此设置了水密底舱盖。水密底舱盖采用单块盖板向上开启的方式:舱盖关闭时舱盖下表面与船底外板齐平,同时舱盖满足水密要求,盖板强度考虑了冰区加强的要求,舱盖四周设有防冻措施,保证舱盖在冰区的安全启闭。
月池顶盖如设计为风雨密,设备成本较高,同时设计和安装要求也较高,通过优化本船总体设计,可达到顶盖非密性要求。本船月池顶盖位于月池围井顶部,采用2 块埋入式盖板向下开启的方式,舱盖上表面与主甲板齐平,当处于关闭状态时,舱盖上可以堆放一定负荷的重物,同时舱盖向下开启,减少了对月池收放提升机构的影响。
月池收放系统,主要技术指标如下:
1)ROV 收放系统
(1)ROV 布放回收模式
安全工作负载:5 t
工作速度:30 m/min
作业海况:4 级正常作业,5 级应急回收
(2)其它装备布放模式
安全工作负载:20 t
工作速度:15 m/min
作业海况:3 级
2)CTD 收放系统
安全工作负载:3 t
工作速度:30 m/min
作业海况:4 级正常作业,5 级应急回收。
4.2 月池系统工作原理
以ROV 收放为例,先将无人潜水器ROV 与月池系统的ROV 收放装置的导接头进行连接,并提升离开月池顶盖;采用油缸分别驱动月池顶盖和底盖开启,操作ROV 收放装置,顺着月池导轨进行下放、入水,下放至海面规定深度,将导接头与ROV 脱开,此时可操作光电缆绞车进行ROV 的布放工作;回收时采用光电缆绞车,将ROV 回放至海面规定深度,与导接头连接后进行提升,从水下一直提升至月池顶盖上方一定深度;关闭月池顶盖和底盖,将ROV 放置在月池顶盖上方,完成ROV 在月池的布放回收工作;CTD 装置的收放原理与上述基本一致,但ROV 收放装置工作时需要CTD 收放装置处于收藏状态,当使用时将CTD 收放装置展开使用。
月池收放系统是月池系统的核心,需要实现CTD、ROV、AUV 等科考设备的收放:CTD、ROV 收放提升,采用固定导轨结合活动导轨的方式,即在顶盖下方设置固定导轨,顶盖上方设置活动导轨。非工作状态时,顶盖关闭,活动导轨处于最上端位置,收放提升装置通过止挡块固定在活动导轨上;工作状态时,顶盖开启,活动导轨在液压油缸作用下,垂直向下移动,直至与月池围井中的固定导轨完成对接。此时,收放提升装置就可顺利从活动导轨滑入固定导轨中,实现在围井内上升与下降的功能。
月池系统主要功能如下:
1)布放回收;
2)提升下放;
3)回转;
4)闭锁;
5)紧急停机;
6)顶盖、底盖开启;
7)锁紧。
5 布缆设计
如前所述,ROV、CTD 等科考设备既可通过布置在露天甲板上的艉门架、舷侧门架布放回收,也可在完全冰区或恶劣海况或特殊作业时,通过月池系统实现在船内部遮蔽布放回收。
5.1 艉门架布缆设计
艉液动门架可用于载人潜器的收放操作,并可服务于光电缆和地质纤维缆。载人潜器通过门架上的导接头与门架连接,无需布缆。
光电缆布缆设计:光电缆绞车→绞车舱舱顶导向滑轮→潜器间三向滑轮→艉门架滑轮;地质纤维缆布缆设计为:地质缆绞车→绞车舱舱顶导向滑轮→潜器间滑轮→艉门架滑轮。
艉门架布缆图,如图4 所示。
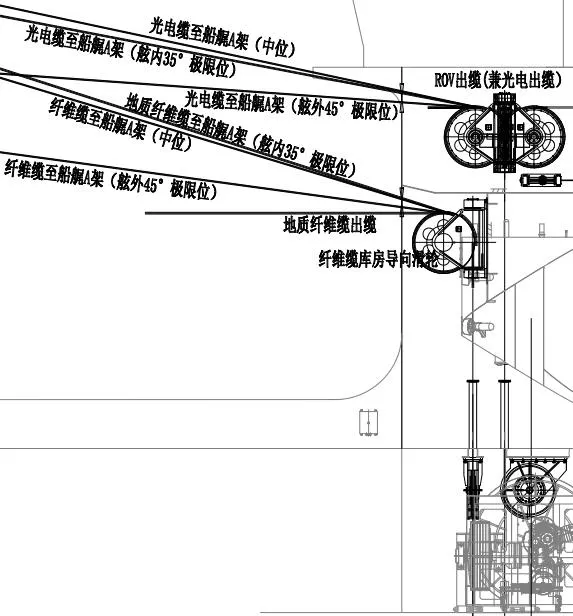
图4 艉门架布缆图
潜器间三向滑轮可手动调整到三个方向:导向艉门架、舷侧门架、月池。三向滑轮布缆图,如图5 所示。

图5 三向滑轮布缆图
5.2 舷侧门架布缆设计
舷侧门架可用于ROV 和CTD 系统的收放等工作。
ROV 缆布缆设计:
ROV 绞车→绞车舱舱顶导向滑轮→潜器间三向滑轮→舷侧门架;
CTD 缆布缆设计为:
CTD 绞车→绞车舱舱顶导向滑轮→潜器间二向滑轮→潜器间滑轮→舷侧门架。
二向滑轮布缆图,如图6 所示。
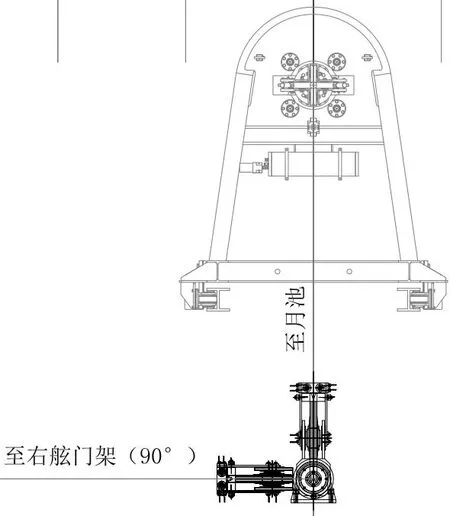
图6 二向滑轮布缆图
5.3 月池布缆设计
月池系统可用于ROV、CTD 等收放操作,也可用于收放其它科考设备和仪器,如搜寻探查型 AUV、水下吊车等。
ROV 缆布缆设计:
ROV 绞车→绞车舱舱顶导向滑轮→潜器间三向滑轮→潜器间滑轮→月池滑轮→月池;
CTD 缆布缆设计:
CTD 绞车→绞车舱舱顶导向滑轮→潜器间二向滑轮→月池滑轮→月池。
月池布缆图,如图7 所示。
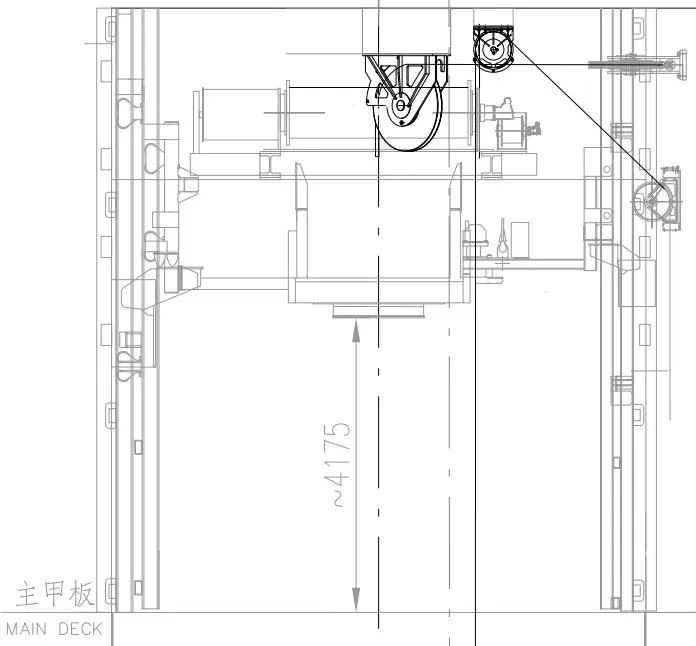
图7 月池布缆图
6 辅助系统设计
科考收放辅助系统,包括科考设备转运系统和科考设备交通设施:科考设备转运系统,用于将科考设备在艉露天甲板、月池车间、月池之间进行转运;科考设备交通设施,用于载人潜器等的登乘等。
6.1 科考设备转运系统
主要由安全工作负载为50 t 的电动轨道车、轨道、控制系统、甲板系固件组成,其功能如下:
1)轨道车前进、后退;
2)轨道车调速;
3)防倾覆;
4)紧急停机;
5)多部位操作。
轨道车运行速度为6 m/min,驱动方式为变频驱动,在4 级海况时可正常作业;轨道车座落在轨道上,轨道分段整体吊装在轨道,安装垫块后用调整垫片进行预调平,然后将安装支座焊接于轨道安装垫板上;安装垫板船上现场定位焊接,焊接完成后上表面激光打平,尽量保证高度平面度。
转运系统图,如图8 所示。
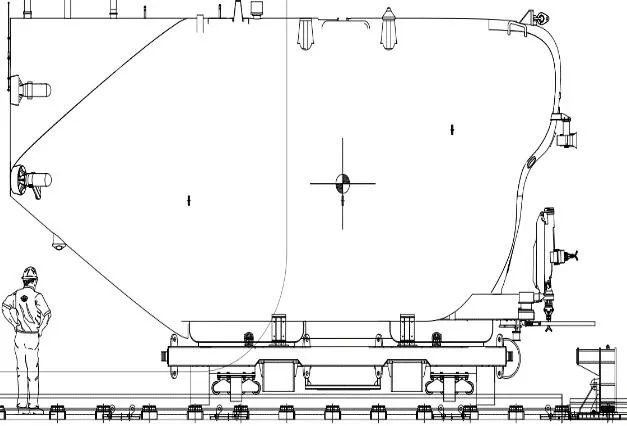
图8 转运系统图
6.2 科考设备交通设施
科考设备交通设施,主要由载人潜器登乘及A 架维护、载人潜器登乘、月池登乘组成。
“奋斗者”号载人潜器,高约5 m、长约10 m,载员的进出口设在顶部,需设计专门的登乘设施,如图9 所示。
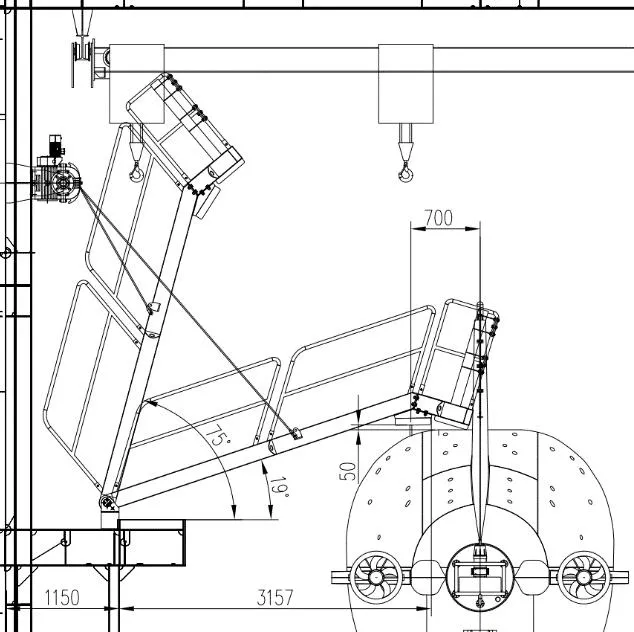
图9 载人潜器登乘图
载人潜器A 架的高度约20 m,导接头的高度约15 m,当A 架维护时也需要设计专门的设施用于到达导接头处。
载人潜器维护架图,如图10 所示。
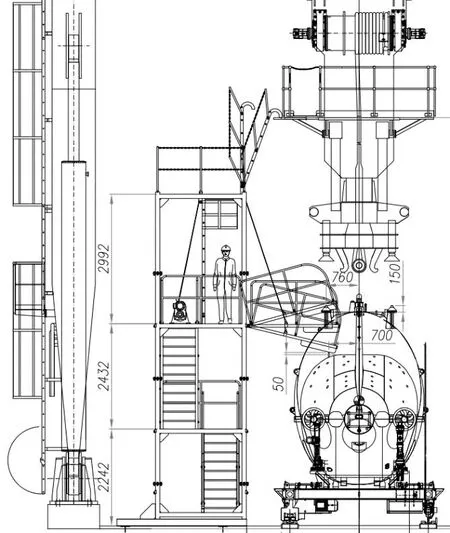
图10 载人潜器维护架图
月池系统使用时,月池上舱盖打开,需要设计专门的设施用于到达月池内从事解开或连接无人潜器浮标等作业。
7 结束语
本极地科考船科考收放系统的设计,确保本船具备全海深全海域特别是极地水域科考作业的能力,同时具有极佳的兼容性,可服务于今后开发的深海科考设备;本船可支持极区载人深潜作业、月池作业型ROV、极区海底打捞救援。以上均为国内首创,对今后类似船型设计具有较大的参考价值。