基于Altair Inspire的四旋翼无人机机身部件轻量化设计方法
2024-01-20陈子乐左毅成马祺隽张霖安芬菊
陈子乐,左毅成,马祺隽,张霖,安芬菊
(广东海洋大学 机械工程学院,广东 湛江 524088)
0 引言
随着各国对军事安全的日益重视以及民用市场的需求增长,世界各主要国家都加大了军用和民用无人机研制投入,并取得显着成效[1]。其中,美国是发展得最快、实力最强大的国家,在军用无人机方面是绝对的霸主,目前投入使用的军用无人机已多达75种[2]。反观我国的现状,虽起步较晚,但后续发展较为迅速,到目前为止,投入使用的无人机型已达到100多种。特别是民用方面,深圳大疆创新科技有限公司为该行业的佼佼者,在全世界拥有航拍型小型无人机70%的市场份额。这种民用小型无人机普遍采用四旋翼结构作为机身,该种结构具有结构简单、操作灵活、带载能力强等优点[3]。但由于该种结构无法搭载大体积的供电模组,续航时长不足是该种结构的无人机普遍存在的一个问题。有研究结果表明,无人机的续航时长与其自身的质量成正比,随着机身的质量增加,其续航时长也相应降低[4]。故对无人机机身进行轻量化设计是一种发展趋势,具有节约材料和提高续航的双重优势,因此具有良好的前景。
Altair Inspire是一款轻量化设计软件,其具备拓扑优化、增材制造设计、结构分析等功能。该软件可应用于产品的早期研发,可减少研发周期,加速了产品的创新和结构的设计,有效降低产品制作的成本[5]。以下运用该软件对一种四旋翼无人机机身部件从初始强度分析、拓扑优化、几何重构、强度校核等方面进行轻量化设计。
1 初始强度分析
图1为四旋翼无人机机身部件的实体模型。由于机身的主要的载荷来自电动机、电子设备和载重,因此根据实际的受载情况对模型进行适当的简化调整,如图2所示。

图1 机身部件的实体模型
图2 机身部件的简化模型
1.1 初始强度分析参数设置
在开始初始强度分析前,需要对模型的材料、约束、载荷及载荷工况等参数进行设置。
1)材料。为减少前期的研发周期,选用ABS作为本次设计的材料。
2)约束。由于四旋翼无人机在控制飞行时没有约束,所以采用惯性释放。
3)载荷。为了模拟四旋翼无人机搭载有质量的物体的实际情况,例如搭载摄像头。采用“质量点”功能,将摄像头等物理的质量施加在四旋翼无人机机身位置5的下方A点,通过柔性连接器连接,连接器端点A的坐标为(0 mm,0 mm,-15 mm),搭载物体质量为0.1 kg。载荷作用位置和大小分布情况如图3所示。

图3 载荷分布情况
F1作用于位置1的圆孔内侧面,大小为20 N,方向为Z轴正方向。 F2作用于位置2的圆孔内侧面,大小为20 N,方向为Z轴正方向。 F3作用于位置3的圆孔内侧面,大小为20 N,方向为Z轴正方向。 F4作用于位置4的圆孔内侧面,大小为20 N,方向为Z轴正方向。 F5作用于点A,坐标为(0 mm, 0 mm, -15 mm),大小为60 N,方向为Z轴负方向。
4)载荷工况。由于四旋翼无人机分别工作在不同的情况,因此把载荷工况设置为两种。
载荷工况1:F1,F2,F3,F4。
载荷工况2:F5。
1.2 初始强度分析结果
设置好分析参数后,对模型进行初始强度分析,得出在该参数下模型的最大米塞斯等效应力为3.081 MPa(如图4)、最大位移为0.2489 mm(如图5)和最小安全系数为14.6(如图6)。模型的最大位移要求小于0.8 mm,最小安全系数要求大于2.5。分析结果符合要求。

图4 最大米塞斯等效应力

图5 最大位移
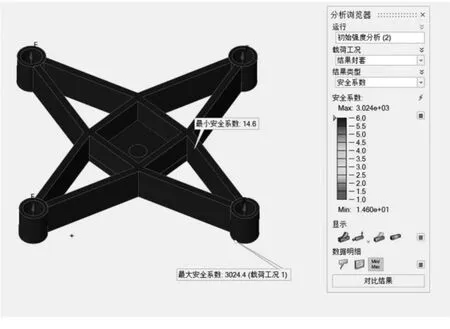
图6 最小安全系数
2 拓扑优化
2.1 指定设计空间
在初始强度分析完毕后,要对模型进行拓扑优化,先指定四旋翼无人机机身部件主体部分为设计空间,其余灰色的通孔部分为非设计空间,如图7所示。

图7 设计空间
2.2 优化形状控制设定
拓扑优化技术即在给定的设计空间内找到最佳的材料分布或传力路径,从而在满足产品性能的条件下得到质量最轻的设计。为得到最佳方案,对软件给出的各种不同的形状控制进行搭配,得出了7种形状控制的方案,通过对7种方案进行对比分析来得到最优的方案。
方案一:添加对称形状控制。设置Y-Z,X-Z为基准平面的双对称约束,提交优化求解计算。
方案二:添加挤出形状控制。设置以Y-Z为基准平面的挤出约束,提交优化求解计算。
方案三:在Y-Z基准平面添加双向拔模形状控制。添加±X方向,基准平面为Y-Z平面的双向拔模约束,提交优化求解计算。
方案四:在Y-Z基准平面添加双向拔模形状控制。设置基准平面为Y-Z、X-Z平面的双对称约束,添加±X方向、基准平面为Y-Z平面的双向拔模约束,提交优化求解计算。
方案五:在Y-Z基准平面添加单向拔模形状控制。添加+X方向、基准平面为Y-Z平面的单向拔模约束,提交优化求解计算。
方案六:在Y-Z基准平面添加单向拔模形状控制。设置基准平面为Y-Z、X-Z平面的双对称约束,添加+X方向、基准平面为Y-Z平面的单向拔模约束,提交优化求解计算。
方案七:在X-Y基准平面添加辐射状形状控制。设置基准平面为X-Y的辐射状约束,提交优化求解计算。
7种不同形状控制方案设置如图8所示。

图8 形状控制方案
2.3 优化参数设置
选定好形状控制后,设置模型优化目标为最大化刚度,质量目标设计空间总体积的20%,厚度约束为6 mm,优化参数设置如图9所示。

图9 优化参数设置
2.4 优化结果探究
保持平滑结果勾选,拖动滑条探究优化结果至优化结果连续,对几种结果进行对比分析。优化结果如图10所示。
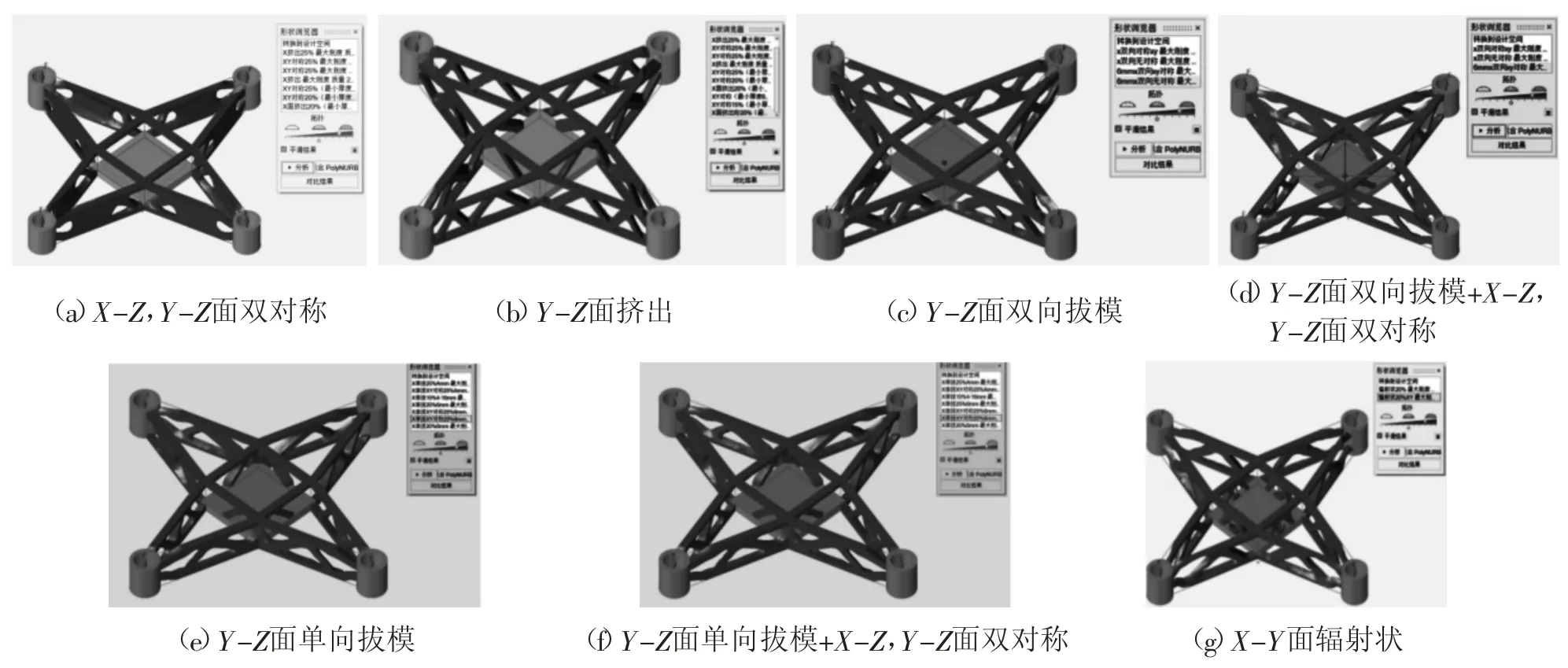
图10 优化结果
2.5 优化模型强度校核
对四旋翼无人机机身部件轻量化设计结果进行强度校核,设置分析单元尺寸为2 mm,计算速度/精度选择更准确,对全部载荷工况分析。优化模型强度校核分析结果如图11所示。
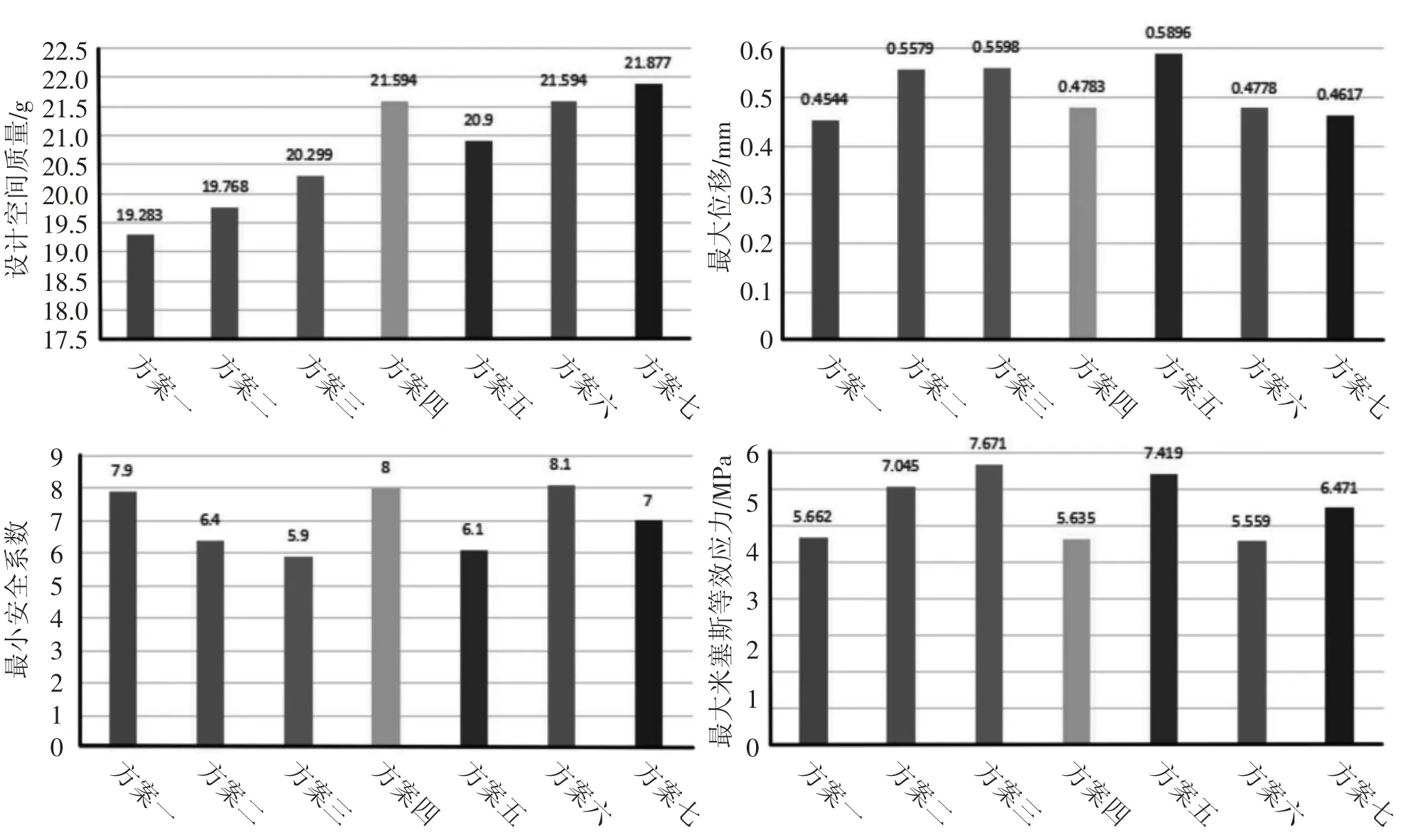
图11 优化模型强度校核结果对比柱状图
2.6 方案的初步选择
根据上述的对比结果以及各个优化方案形状进行分析,控制各方案形状质量在较小的范围内保持相同。7种方案在优化后,最小安全系数、最大米塞斯应力均符合要求,从数据上看,方案一的各项指标都较好,但是其优化形状大面积材料堆积,模型传力路径不明显。故排除方案一。方案三、方案五3项指标数据一般,且其优化后形状不具有对称性,考虑到四旋翼无人机机身部件其对称性结构,故排除方案三、方案五。对方案二、方案四、方案六、方案七进行比较后发现,方案二和方案七形状较为合理,可进行再优化的可行性更高,因此选择方案二、方案七进行进一步优化。
2.7 方案调整与参数改进
更改方案二、方案七拓扑优化的厚度约束为3 mm,尽可能在总体设计要求的范围内,即最大变形位移小于0.8 mm,最小安全系数大于2.5 mm。拖动进度条使质量尽可能减小。得出两个方案的拓扑优化结果,如图12、图13所示。

图12 方案二拓扑优化结果

图13 方案七拓扑优化结果
2.8 参数调整后的模型强度校核
对调整参数的模型进行强度校核,得到结果如表1所示。
通过进一步拓扑优化分析后,对比各项数据可以得出,方案七的质量更轻,最大位移小,最小安全系数高。因此,选择方案七辐射状作为最终方案进行几何重构。
3 几何重构
几何重构过程包括自动重构和手动重构。自动重构快速方便,可在较短的时间内得出优化结果,但存在局部结构不合理的情况。手动重构虽需要较长的优化时间,但得出的优化结果结构更为合理,性能更符合要求。
3.1 自动重构
自动重构时在拟合参数设置中调整平滑结果为高(如图14),使优化的模型过渡更加流畅,增大PolyNURBS面的数量,使优化的模型更加细致。由于模型在重构后容易产生断面,为方便调整和修复断面,取消勾选相交PolyNURBS零件,使优化后的结果为PolyNURBS零 件 。 点 击 拟 合PolyNURBS进行拟合,得出优化结果如图15所示。
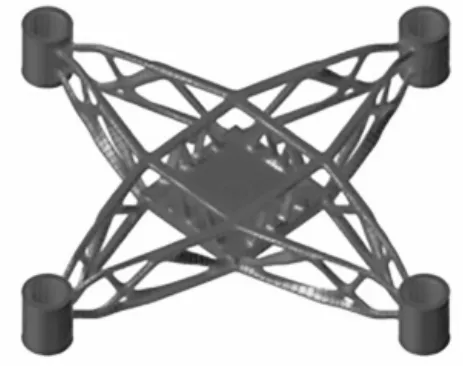
图15 自动拟合结果
由于优化后的结果有超出非设计空间的部分,选择在非设计空间上画出需要删除对应部分的圆,使用推拉功能删去超出的部分,如图16所示。

图16 删除超出非设计空间部分
3.2 手动重构
1)对优化结果进行手动包覆,如图17所示。

图17 手动包覆
2)通过拖拽控制点的方式调整合适的优化结果,使其与非设计空间相交,如图18所示。

图18 拖拽控制点
3)使用布尔运算工具对优化重构结果和非设计空间进行几何相交,形成单一的实体三维模型,如图19所示。

图19 布尔运算
4)使用圆角工具处理重构结果与非设计空间之间的衔接,如图20所示。

图20 圆角处理
5)最后获得重构后方案七模型,如图21所示。

图21 方案七手动重构后模型
4 强度校核
4.1 强度校核参数设置
对四旋翼无人机机身部件结构部件自动拟合重构和手动拟合重构的结果进行强度校核,设置分析单元为2 mm,计算速度/精度选择更准确,勾选全部载荷工况分析,如图22所示。

图22 强度校核
4.2 两种重构方式的分析结果
对两种重构方式进行强度校核分析,分析结果如表2所示。
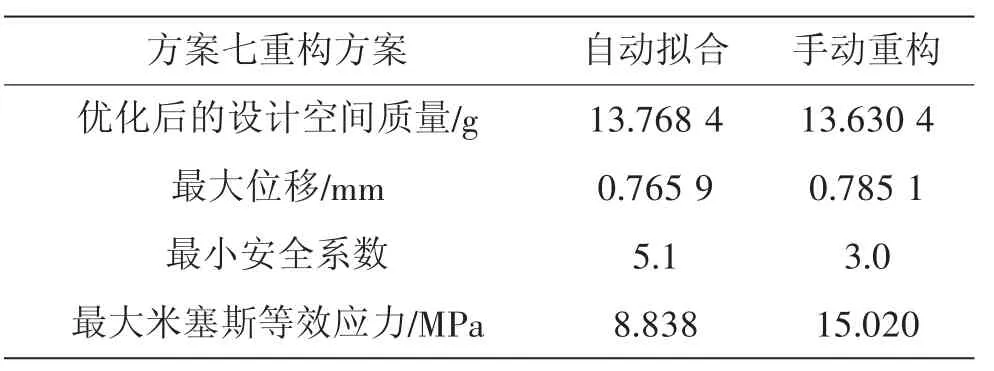
表2 自动拟合与手动重构对比
通过表2 自动拟合结果和手动重构的结果进行对比分析,两种重构方式都符合总体设计要求。但是自动拟合重构局部设计空间与非设计空间连接凹凸不平,调整困难。手动重构表面相对光滑,连接处过渡较好,更容易进行加工制造,因此选择方案七手动重构作为最终方案。
5 结论
四旋翼无人机机身部件初始的强度分析结果:最大位移为0.248 9 mm,最小安全系数为14.6,最大米塞斯等效应力为3.081 MPa。
轻量化设计之后的四旋翼无人机机身部件强度校核结果:最大位移为0.785 1 mm,最小安全系数为3.0,最大米塞斯等效应力为15.02 MPa。
四旋翼无人机机身部件优化前的总质量为66.158 g,通过轻量化设计之后的总质量为31.398 g。
四旋翼无人机机身部件在优化前的设计空间质量为48.391 g(材料ABS),通过轻量化设计之后的设计空间质量为13.630 4 g,实现了71.8%的减重。
四旋翼无人机机身部件的最大位移为0.785 1 mm,小于所要求的最大位移0.8 mm,最小安全系数3.0,大于所要求的最小安全系数2.5,因此四旋翼无人机机身部件强度校核结果满足实际的强度需求。
可见使用轻量化设计软件Altair Inspire对四旋翼无人机机身部件进行轻量化设计是一种减轻无人机质量,提高续航能力的有效方法。
