不同风格驾驶员眼动特性分析
——夜间快速路分流区
2024-01-20吴立新
吴立新,杜 聪
(吉林建筑大学 交通科学与工程学院,长春 130118)
随着汽车技术高速发展的同时也带来了严重的交通问题,主要原因在于目前的车辆保有量的提高、驾驶员不规范驾驶以及车辆的高速化。目前,交通事故的频繁发生、驾驶员人身安全性的降低和财产损失的惨重使得交通安全问题逐渐成为社会性问题。其中,城市快速路作为城市路网的骨架,对于城市的交通运行具有明显的改善作用。然而由于城市快速路交通流量大,车辆速度相对较快,城市快速路的交通安全问题日益突出。其中快速路分流区是交通事故频发区域,而驾驶员在分流区不当的换道行为是引发事故的重要因素之一。近几年的统计数据表明,因为驾驶员的不当操作造成的交通事故占交通事故总数的90%[1]。车道变换具有自身行为特性,常会产生交通冲突,容易引发交通安全问题。根据美国国家公路交通安全管理局的统计数据显示,因车辆进行车道变换而导致的交通事故数量占道路交通事故总数的4%,因此规范驾驶员换道行为对于减少快速路分流区事故发生率,提高驾驶员的人身安全有着重要意义。
Carsten 等[2]根据相关数据研究得出,驾驶方式和交通事故的发生率有很强的相关性,在激进型驾驶员中,出现追尾事故的概率是普通驾驶员的4倍多,因此,以研究驾驶方式为切入点,能更为有效地减少交通事故发生率。对于驾驶风格的划分方法,Martinez 等[3]提出了一种用于智能车辆控制和高级驾驶辅助的驾驶风格特征和识别的调查,该调查主要对驾驶风格进行识别与判断。Chung等[4]通过K均值类别和逻辑算法将驾驶风格划分为冷静、冒险、粗心、躁动四种类型。 Zhang等[5]提出了几种基于车辆交互特征的驾驶波动性指数,并开发了动态聚类方法来确定最佳识别时间窗和驾驶风格方法。Gqa等[6]通过两种主题模型:MLDA和MHLDA模型,以真实的车辆运行数据来对不同驾驶风格的司机进行识别。Huo等[7]使用修订后的中文版多维驾驶风格量表(MDSI-C)衡量驾驶员的驾驶风格。在国内的研究中,董俊一[8]提出了将车辆换道效用和安全评价等指标纳入动态驾驶风格表中,进而更全面地识别驾驶风格。吴兴琪[9]利用跟驰数据集的各种参数构建了划分跟驰驾驶风格的聚类判别模型,从而对比不同驾驶风格之间的差异。
在明确驾驶风格如何划分和识别后,文中还对换道意图进行了识别。只有了解驾驶员换道意图,才能更好规范驾驶员换道行为,减少因换道行为不当造成的交通事故。目前国内外很多学者在研究驾驶员换道意图预测的技术,它是先进辅助驾驶系统(ADAS)发展的关键技术之一,可以大大减少因变道引起的交通事故,保证驾驶安全。Tang等[10]学者提出了一种基于Multi-LSTM(长短期记忆)的先进预测方法来有效预测变道意图。Shangguan等[11]提出了一个主动性的车道风险预测框架,该框架整合了车道意图识别模块和车道风险预测模块,采用具有时间序列输入的长短期记忆(LSTM)神经网络来识别驾驶员的驾驶意图。He等[12]提出了一种具有双层隐马尔可夫模型(HMM)的结构来识别驾驶意图并预测驾驶行为。吕思雨[13]通过对车辆的多变量轨迹序列进行建模来识别车辆换道意图。宋晓琳等[14]提出一种基于长短期记忆网络的换道意图识别方法,能够对周边车辆是否具有换道意图进行识别。武林[15]通过GRU-ATT进行了车辆驾驶意图识别与轨迹预测。Pan等[16]搜索了五个学术文献数据库,确定利用眼动技术预测驾驶员变道意图(DLCI)的最佳实践和未来研究方向。Jang等[17]使用基于瞳孔大小变化的换道意图识别系统构建模型来识别驾驶人是否有潜在的换道意图。Wu 等[18]提出了一种变道意图识别方法,研究采用了Back-Propagation神经网络方法来实现驾驶意图的分类功能,通过试验获取时间间隔、司机的眼动数据、转向角和车道偏离数据,然后分别分析了自由驾驶和变道条件下的典型特征,进而建立识别模型。彭金栓等[19]通过实车试验得出驾驶员的视觉特性在车道保持和换道意图两个不同阶段具有显著差异。同时彭金栓等在视觉特性的基础上,采用证据理论对驾驶员换道意图进行识别,研究发现该理论识别信度高,时序性强。王波[20]通过视觉特性建立了驾驶员紧急换道意图模型。 商艳等[21]采用瞳孔变动视觉特征的换道意图识别方法。张磊等[22]将换道模型按照换道动机与换道决策两个维度展开论述,针对换道行为特征归纳了驾驶人换道过程中的眼部及头部运动特性,分析了车道变换时自车及周围车辆的运动状态。
相对于大部分研究只通过对单一的从驾驶风格或者驾驶员换道意图识别进行分析并提出建议来降低交通事故发生率,文中研究把驾驶风格与换道结合起来,以驾驶风格为基础,结合不同驾驶风格驾驶员在夜间快速路分流区换道的不同阶段的眼动数据,对不同风格的驾驶员有针对性地提出改善建议,从而更好、更全面、更高效地提高驾驶员在夜间快速路分流区行车的安全性。
1 驾驶风格划分
1.1 问卷设计
文中使用DBQ(Driver Behaviour Questionnaire) 调查问卷进行调查。在侯海晶等[23]研究的基础上,结合夜间快速路分流区的视频录像,仔细观察换道车辆的驾驶行为合理与否,以此为研究背景设计出针对夜间快速路分流区的问卷。采用李克特量表对各问题选项进行统一设计,每个问题有“总是”“时常”“不常”“很少”“从不”五种回答,分别记为 4、3、2、1、0。
问卷在线上和线下同步进行发放,线上采取问卷星网站和朋友圈等方式进行发放;线下以在学校、商场等大型公众场所对有驾照人员询问的方式进行发放。此次总共回收235份问卷,通过筛选、去除不合理的问卷,共获得有效问卷200份(占总数的85.1%)。
1.2 问卷检验
要检查问卷调查的结果是否有用以及有效程度的大小,就有必要通过调查的结果来检测问卷是否满足了要求。信度系数主要是表征问卷中调查结论的一致性与稳定性,文中选择了信度系数——Crinbach Alpha值(α表示)来进行问卷评估[24]。人们通常认为,当α值超过0.8时问卷的可靠性更高;当α低于0.6时则问卷无效。α计算公式如式(1)所示。
(1)

问卷好坏可以通过效度进行检验,效度越高说明问卷越好,通过SPSS软件进行皮尔逊系数双变量相关性检验,结果如表1所示。可以得出,10个问题的系数都是正值,而且四分之三问题的相关系数在0.01和0.05显著水平以下,说明该驾驶风格识别量表具有很好的内容效度。

表1 驾驶风格问卷调查
1.3 基于主成分分析的驾驶风格问卷量化
主成分分析法目的是对所有成分进行降维,以获取主要成分。该方法在评价参数相关性较高时能消除指标间的信息重叠,并能根据指标信息,通过数学运算而自动生成权重。
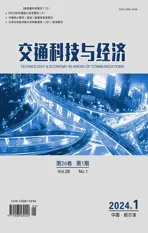
对20名驾驶人的调查结果进行主成分分析,以统计其综合得分并进行驾驶风格划分。对所有问题的平均得分进行主成分分析,可以得出相关的特征根λ以及主成分初始因子负荷矩阵M,进而估算各主要成份之间的方差贡献率和累计贡献率。按照累计贡献率超出85%的准则, 选择城市快速路上跟车行驶时离前车太近、夜间城市快速路上超速行驶、在夜间快速路分流区换道时很早开启转向灯、夜间从快速路进入匝道时提前很早换道至右侧车道4种情况作为主成分因子,如表2所示,其累积贡献率达到92.280%。
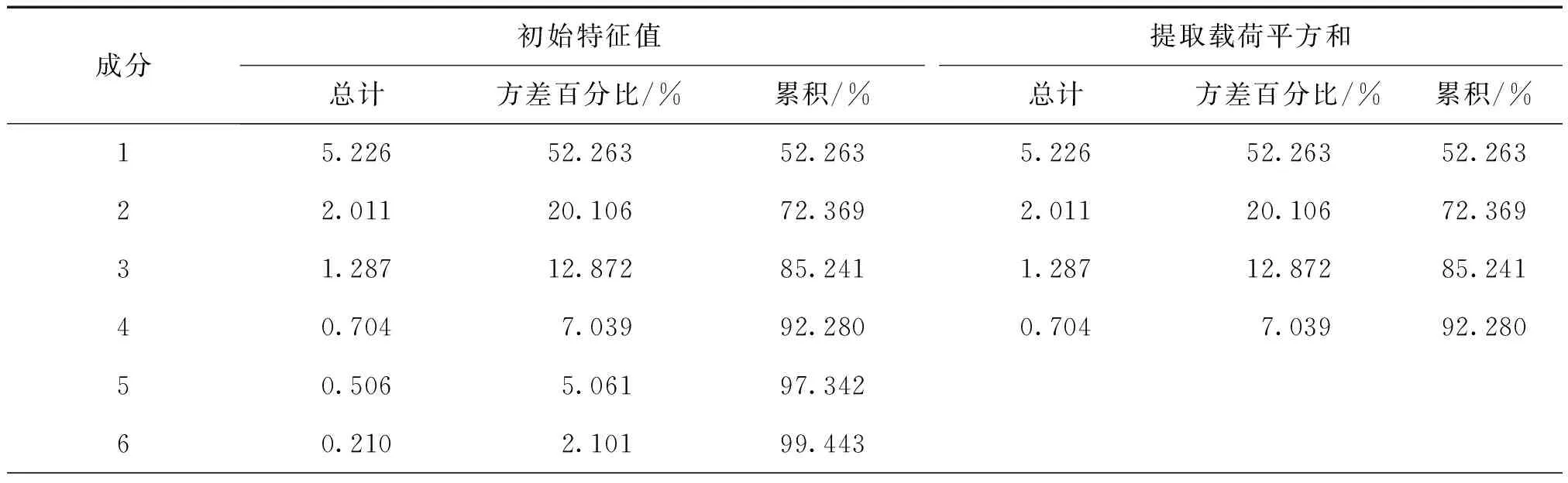
表2 总方差解释
确定主成分之后,按照式(2)计算出主成分得分系数矩阵Aik:
(2)
式中:Mik为主成分初始因子负荷矩阵M的第k列;λk为矩阵M的第k个特征根;Aik为第i题的主成分得分系数矩阵,各主成分中每个指标所对应的系数如表3所示。

表3 各主成分对应的系数
20名试验驾驶员的主成分得分Fk为:
Fk=azx1+bzx2+…+jzx10;k=1,2,3,4
(3)
式中:zxi为xi的标准化变量。
20名驾驶员的驾驶风格综合得分量化模型:
F=0.566F1+0.218F2+0.139F3+0.076F4
(4)
部分被试驾驶员得分如表4所示。

表4 部分被试驾驶员各主成分得分和综合得分
1.4 驾驶风格分类
驾驶员的驾驶方式评分值愈高,则驾驶员的驾驶方式愈具侵略性。之后,使用 K均值聚类的方法,根据驾驶风格的评分,将驾驶员分成三类:第一类聚类中心是 0.41,总共10个样本;第二类聚类中心是-1.00,总共5个样本;第三类聚类中心是-0.25,总共5个样本。相应地,分别将这三类样本定义为激进型驾驶员、谨慎型驾驶员和一般型驾驶员。
2 眼动分析方法与步骤
为了更清晰地研究驾驶员在换道过程中的眼动参数变化规律,我们需要了解眼动分析的方法与步骤,例如确定驾驶员换道意图时窗宽度,划分驾驶员注视兴趣区域等方法,从而为分析驾驶员在不同换道阶段的眼动参数做好准备工作。
2.1 眼动分析方法
2.1.1 数据时窗确定
为了得到换道意图样本,首先需要确定换道意图的表征时窗。按照正常的驾驶规范,驾驶员开启转向灯时表明驾驶员在此之前已具有换道或转向意图。众多学者深入研究发现,驾驶员在进行变道前的一段时间内会表现出特定的规律,但是对于这段时间具体数值并没有统一的标准。
通过查阅文献以及结合实际情况(夜间试验),将换道分为意图和执行两个阶段:意图阶段是车辆打开转向灯到开始转向所经过的时间;执行阶段为车辆开始偏移直到在目标车道调整好方向所经过的时间。通过结合眼动仪自带录像的视频和车内摄像视频确定换道意图起始时间点。为了追求数据的可靠性,同一风格驾驶员的时窗宽度取均值。表5为三种不同驾驶风格驾驶员换道意图阶段和执行阶段的时窗宽度均值。
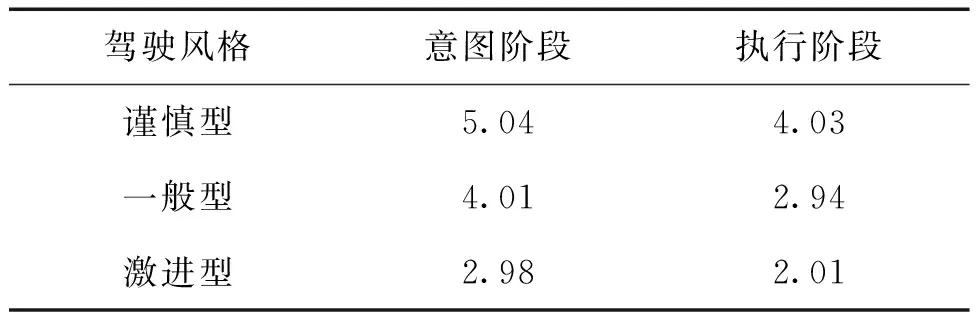
表5 不同风格驾驶员不同阶段时窗宽度 s
2.1.2 注视兴趣区域划分
兴趣区域反映驾驶员行为响应与视觉特性的关系,借助兴趣区中注视点分布判别驾驶员意图、行为特征等。目前,兴趣区域划分没有固定标准,一般依据研究内容与注视点数据人工生成,区域划分主观性较强。文中通过对X(水平)、Y(垂直)方向的视角进行分析,以驾驶员水平视线到前挡风玻璃垂面的交点为原点,对注视区域进行划分,如图1所示,各注视区域目标物如表6所示。
图1 注视区域
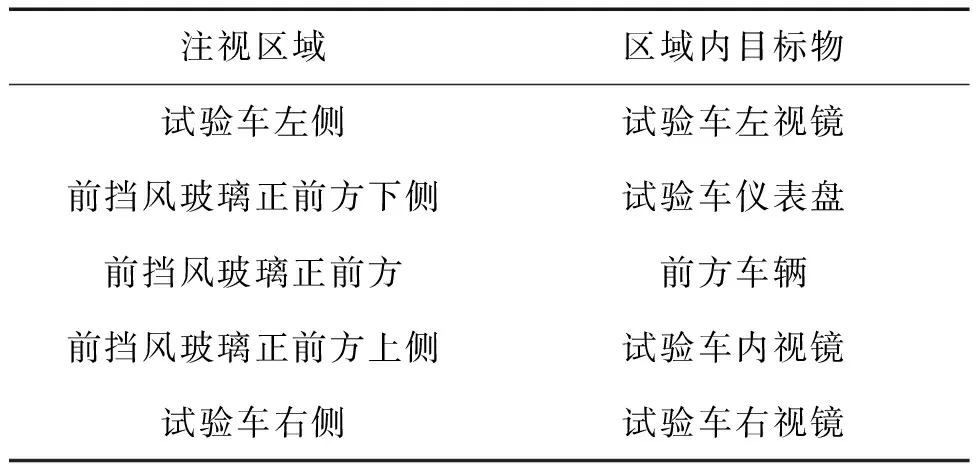
表6 注视区域内目标物
2.2 眼动分析步骤
1)确定三种风格驾驶员在换道意图阶段和执行阶段的时窗宽度。
2)通过眼动仪获取驾驶员注视点分布,通过X(水平)、Y(垂直)方向的视角进行分析,划分注视兴趣区域。
3)分别对三种不同风格驾驶员的后视镜平均注视次数、平均累计注视时间百分比和平均瞳孔面积进行单因素方差分析,以确定其差异性。
4)对其差异性进行定量和定性分析和论述,提出相应观点。
3 试验设计
为保证所获取眼动特性数据的真实性和准确度,以获取自然驾驶数据的实车试验做为首选。因试验时间为夜间,所以强制性要求全体试验驾驶员转向之前开启转向灯。
3.1 试验场景
以长春市东部快速路生态大街方向南向出口分流区为试验地点,主线为四车道,设计速度80 km·h-1的主线分流直接式分流区,匝道为双车道,图2为试验地点分流区示意图,以夜间17:00—19:00为试验时间。
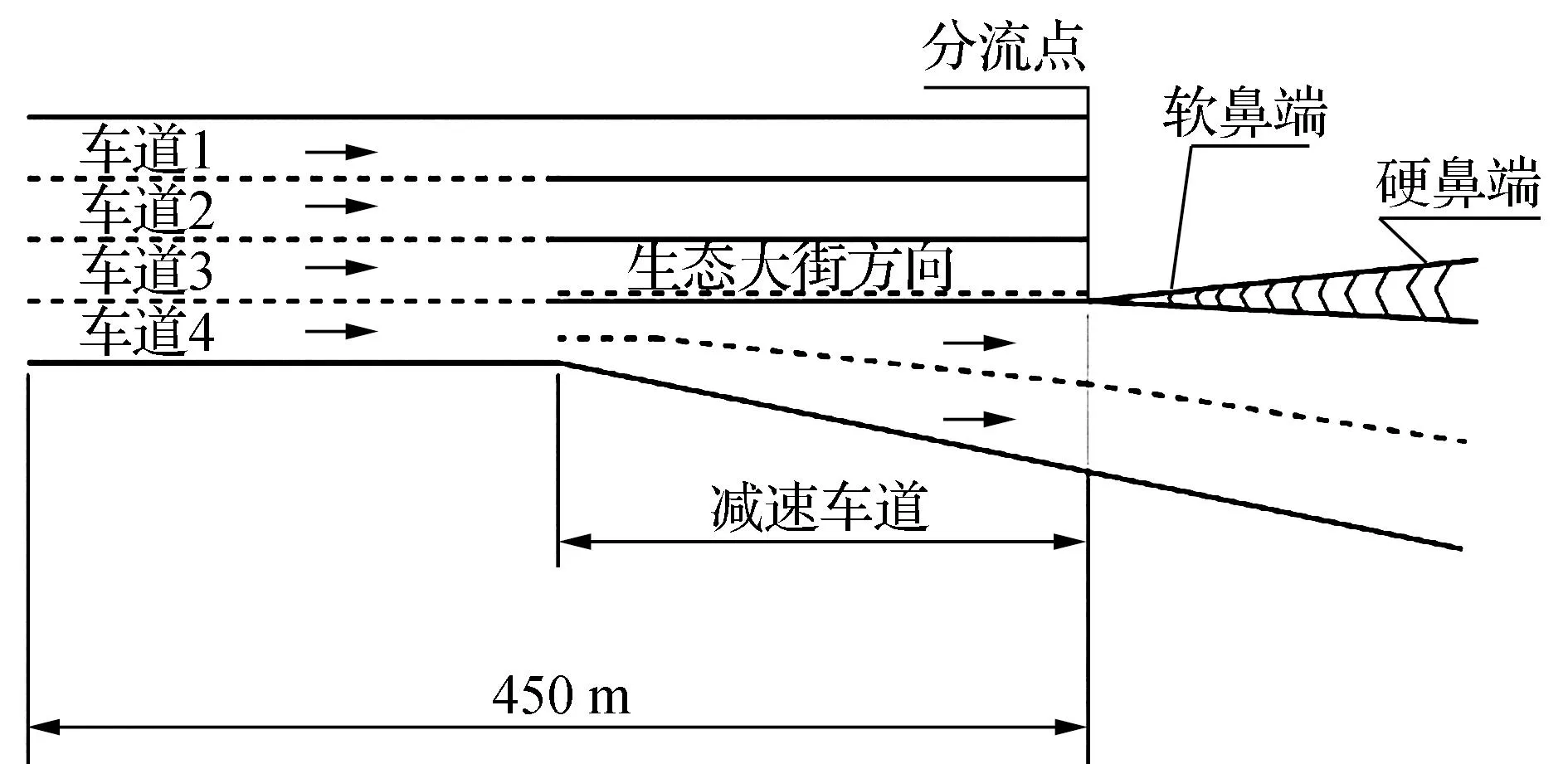
图2 试验分流区
3.2 试验变量
选取不同风格驾驶员进行实车试验来获取换道意图阶段和执行阶段两种典型驾驶模式下的驾驶员的眼动参数,进而分析不同驾驶风格驾驶员在换道和执行阶段的眼动特性之间的差异。试验中的因变量和自变量如表7所示。
3.3 试验设备与人员
试验设备主要有眼动仪、D-Lab 软件、电脑1台、大众轿台、摄像机两台;选择20名无视觉障碍,出发前睡眠足够,心理、生理正常非专业驾驶人员(男性14名,女性6名),两名摄像人员以及操作电脑人员。
3.4 试验步骤
1)提前规划好驾驶路线,并调整好眼动仪,确保眼动仪能正常工作。
2)负责拍摄人员选取好拍摄角度,确保能够拍摄车辆在分流区范围内的运行路线。
3)出发前告知试验驾驶员注意事项以及要求,并对眼动仪进行校准。
4)从匝道以正常车速进入快速路,从进入分流区影响范围开始记录,到出分流区停止记录。
3.5 评价指标选取
眼动参数主要有注视、扫视、眨眼和瞳孔变化。前人试验成果表明,驾驶员在驾驶过程中其眼球扫视运动累计时间和眨眼累计时间所占比例不超过10%,此两方面研究意义不大。因此,文中重点分析注视和瞳孔面积[25]。
通过对后视镜注视次数、累计注视时间以及瞳孔面积使用SPSS进行检验,显著性p均小于0.01。
4 试验结果分析
4.1 后视镜平均注视次数分析
对某区域注视次数多少可以体现驾驶员对该区域的关注度。不同风格驾驶员对后视镜平均注视次数如图3所示。
由图3可得出:意图阶段驾驶员注视次数平均值为1.77,明显多于执行阶段平均值0.30,驾驶员在换道不同阶段对注视次数存在差异。相对于一般型和激进型驾驶员,谨慎型驾驶员在换道两个阶段对后视镜注视次数明显偏多,与文献[23]研究的结果大致相同。谨慎型、一般型和激进型驾驶员对于平均后视镜注视次数占比分别为48%、27%、25%,且三种类型驾驶员在意图阶段对后视镜注视次数均大于执行阶段。
使用单因素方差分析法研究3种风格驾驶员在同一种换道阶段的平均注视次数的差异性。默认p=0.05,在不同换道阶段下,不同风格驾驶员对后视镜注视次数存在明显差别,换道意图阶段和执行阶段均为p<0.01。
4.2 平均累计注视时间百分比
累积注视时间:驾驶员对某一区域注视时间的累计值是衡量对注视区域是否感兴趣的重要指标。三种风格驾驶员的平均累计注视时间百分比如图4~6所示。
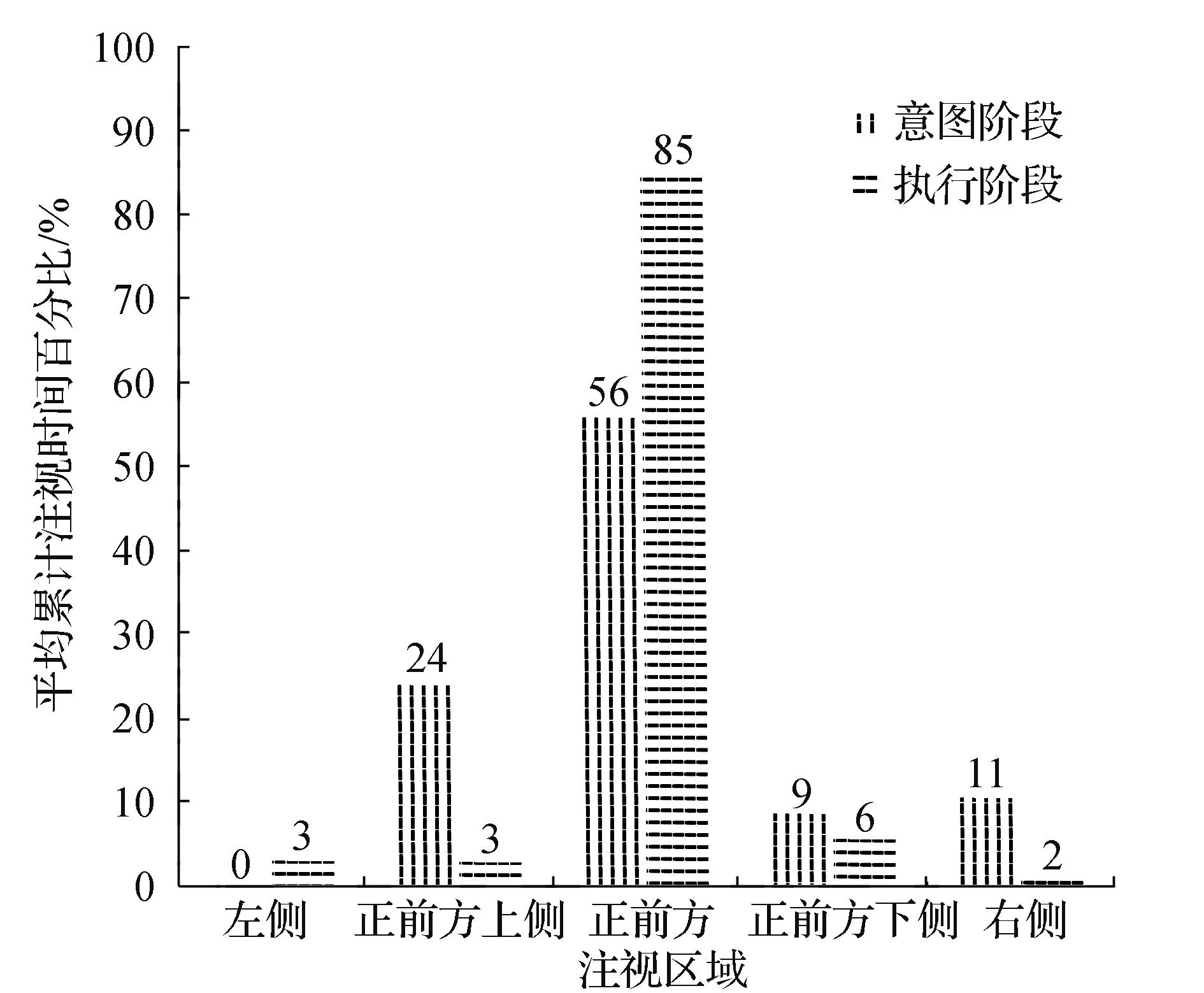
图4 谨慎型驾驶员平均累计注视时间百分比

图5 一般型驾驶员平均累计注视时间百分比
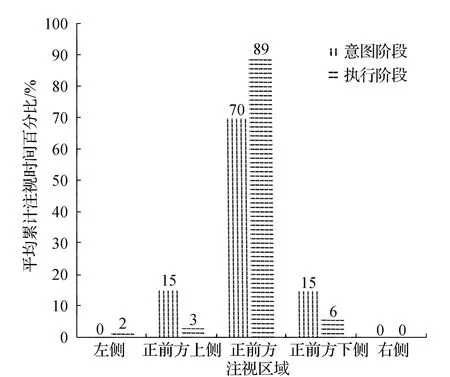
图6 激进型驾驶员平均累计注视时间百分比
由图4、5、6的数据表明:意图阶段试验驾驶员对后视镜累计注视时间的平均值为23%,高于执行阶段平均值12.3%。此外,在意图阶段对正前方平均累计注视时间的平均值62.7%,低于执行阶段平均值76.7%。使用单因素方差分析得到的结果是:存在着明显的差别(换道意图阶段和执行阶段的p值均小于0.05)。而且谨慎型、一般型、激进型驾驶员对正前方换道阶段的平均累计注视时间占比为70.5%、77.0%、79.5%,说明驾驶员在换道阶段更加关注前方道路情况以及车辆,且三种类型驾驶员在意图阶段对平均累计注视时间均小于执行阶段。
4.3 平均瞳孔面积
不同风格驾驶员在不同阶段的平均瞳孔面积,如图7所示,图中表明换道意图阶段驾驶员的平均瞳孔面积(M=1 254.3,SD=531.5)小于车道保持阶段(M=1 447.6,SD=747.6), 说明在执行阶段驾驶员相对于意图阶段更加紧张,更加小心;谨慎型驾驶员相对于其他两种类型驾驶员来说任何阶段都会更加小心。通过数据统计得出,谨慎型、一般型、激进型驾驶员的平均瞳孔面积占比为56.3%、27.6%、16.1%;不同风格驾驶员的平均瞳孔面积在意图阶段和执行阶段大小顺序如下:谨慎型>一般型>激进型,执行阶段>意图阶段。采用 ANOVA 分析了不同风格驾驶员在不同阶段平均瞳孔面积的差异性,p值均小于0.05,具有显著差异。
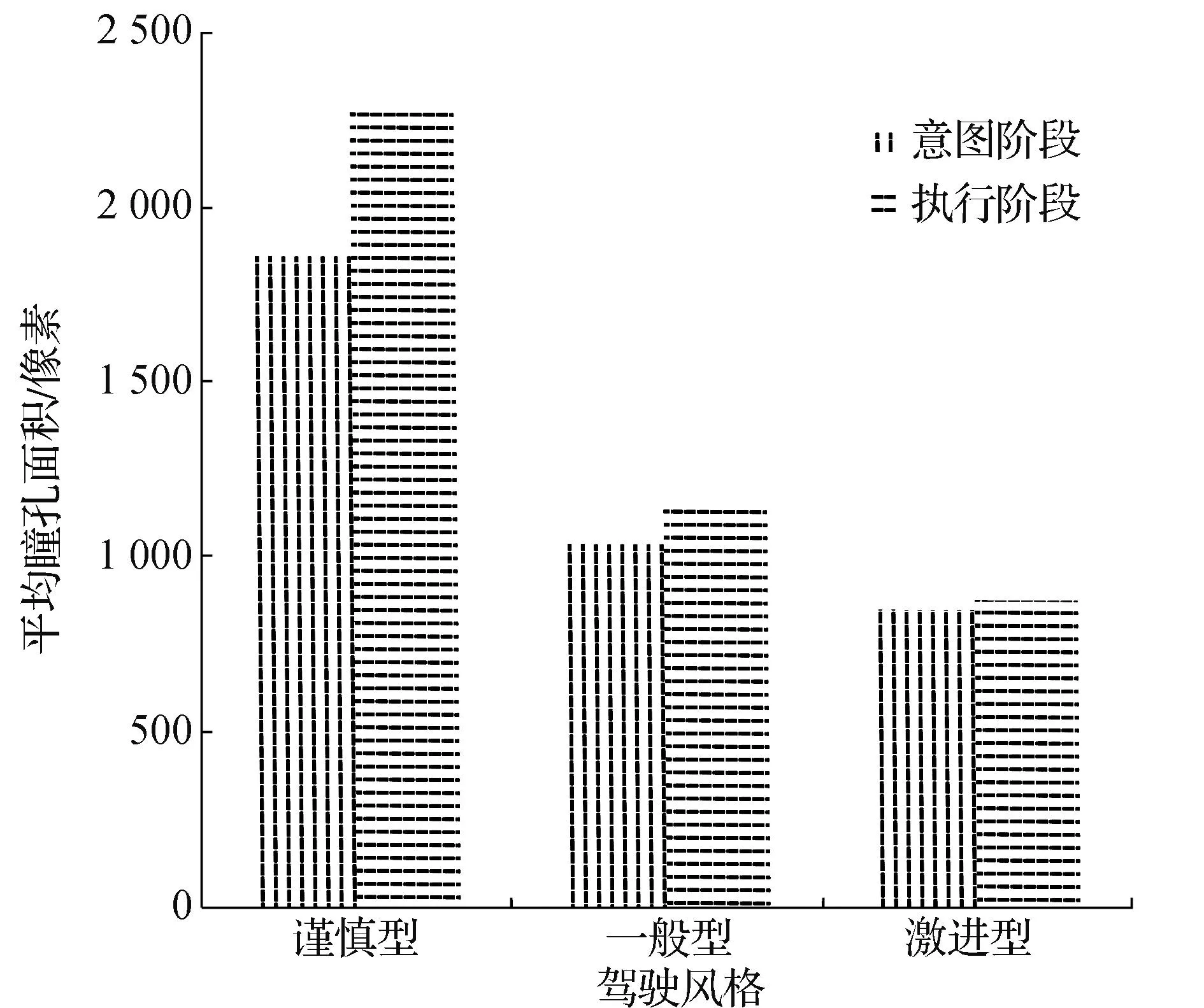
图7 不同风格驾驶员在不同阶段的平均瞳孔面积
5 总结与展望
5.1 总 结
通过以上对不同风格驾驶员的眼动数据分析发现:
1)一般型和激进型驾驶员换道前后对于后视镜注视次数以及换道时对左右环境的关注度明显小于谨慎型驾驶员。结合试验所拍摄视频发现激进型驾驶员有明显的急减速行为,而且倾向于在距离分流区出口50 m距离内换道。由于变道距离过短,导致没有充分的时间关注周围环境,容易造成交通事故的发生;通过激进型驾驶员的瞳孔面积变化,结合拍摄视频和对激进型驾驶员的驾驶感受分析,在距离分流区出口150 m距离换道是安全性更高的距离。
2)谨慎型驾驶员换道前后其瞳孔面积远远大于一般型和激进型驾驶员,表明在一定程度上其换道时心理状态很紧张。结合试验拍摄视频和询问其驾驶感受发现谨慎型驾驶员在换道时犹豫不决,很容易因为换道时的犹豫行为导致错失出口。而强行换道则容易发生交通事故,造成拥堵,所以建议谨慎型驾驶员在换道时放松心态,在确定好目标车道的前提下距离出口450 m至200 m(在此范围内谨慎型驾驶员换道时瞳孔面积最小)范围内尽早进入换道。
5.2 展 望
日益拥挤的交通和其他诱发压力的因素使得驾驶员更有可能通过激进驾驶来发泄他们的挫折感。而且激进驾驶和谨慎驾驶导致的驾驶者伤害严重程度存在显著差异[26],所以交通流的状态也应作为影响夜间快速路分流区交通安全的重要因素。因此,研究进一步发展方向应该在原有的基础上加入不同风格驾驶员在不同的交通流状态下的眼动特性之间的差异性分析,以求为更好地减少快速路分流区交通事故发生率做贡献。