道路信号交叉口行人过街速度与延误估计仿真
2024-01-20张文会徐海彬
张文会,徐海彬
(东北林业大学 土木与交通学院,哈尔滨 150040)
城市道路交叉口是行人与机动车冲突的重要地点,在有信号控制交叉口,行人过街具有一定的集群效应。深入分析行人群体过街速度特性和延误影响因素,对于优化交通设施、提高交通管理水平具有重要的现实意义。
目前该方向的研究多集中在影响行人过街速度与延误因素的确定上。Zhuang等[1]的研究表明,当行人根据绿灯剩余时间做出过街决策时,人行横道宽度对决策影响显著。张学连等[2]分析了行人属性、用地性质、等待位置等因素对行人过街速度的影响。Saxena[3]采用机器学习算法揭示行人过街习惯性、行人与机动车冲突程度和行人年龄是行人过街速度的显著性影响因素。Vasudevan等[4]分析行人过街步行速度曲线和轨迹,表明机动车会显著影响行人过街速度,行人更倾向于前半段提高速度,而后半段降低速度。行人过街行为与空间地点、行人属性有关,平均时间延迟与行人年龄、性别和行人数量有关[5-6]。Bansal等[7]分析了人行道宽度、人行岛宽度等几何条件对行人过街延误的显著影响。Alver等[8]通过交通视频采集和处理,表明行人部分过街行为特性依赖绿灯剩余时间。曲昭伟等[9]揭示了绿灯消散时间和人行横道长度对行人过街行为的影响。陈咨羽等[10]构建人车冲突多元Logistic模型,表明空间违规过街行人平均速度和速度离散程度高于其他人。
基于影响行人过街的诸多因素,陶薇同等[11]结合无干扰条件下的相位延误和对向行人流阻滞延误,提出了一种行人过街冲突延误计算模型。周泱等[12]在基于社会力模型的基础上分析了绿闪信号、周围行人、人行横道边界等影响机理,建立了一种新的行人过街模型。张慧玲等[13]利用微观仿真平台分析老年人过街速度,基于主成分和统计回归获得老年人比例与过街速度关系。陈鹏等[14]利用二元Logistic回归建立行人过街决策模型,在传统社会力模型基础上引入行人主动避让力和人行横道对人的作用力,搭建行人微观运动模型。李娟等[15]在经典社会力模型基础上改进过街行人的相对速度、期望速度和行人与障碍物之间的作用力,根据平行四边形法则构建信号控制交叉口行人过街运动模型。多位学者使用社会力模型分析行人过街冲突、过街速度以及行人跟随、二次过街等过街行为[16-19]。李娟等[20]以机动车、非机动车和行人为研究对象,通过优化信号配时来降低行人过街延误。已有模型可以有效计算车辆与行人冲突造成的行人延误,可以采用行人二次过街或信号相位调整减少车辆与行人之间的延误时间[21-23]。
已有研究多为传统模型搭建和仿真分析,缺少行人间主动避让力与行人作用力等微观行为的研究。文中在上述研究成果基础上,结合实地调查所得数据,从行人性别、年龄、过街空间位置等宏观特征分析各因素对行人过街速度的微观影响;构建符合行人过街场景的社会力模型与改进社会力模型,通过仿真模拟无干扰情况下行人过街,得到人行横道宽度对行人过街延误时间的影响程度。
1 行人过街数据调查
选取两处行人过街流量较大的十字路口作为调查地点,采用高空拍摄与地面拍摄双机位采集视频,利用Tracker软件解析视频得到行人微观数据,将数据整理录入SPSS(数据分析软件)进行分析拟合,最后提取实际数据录入MassMotion(行人模拟和分析软件)与AnyLogic(混合系统建模和仿真软件)仿真分析,具体流程如图1所示。
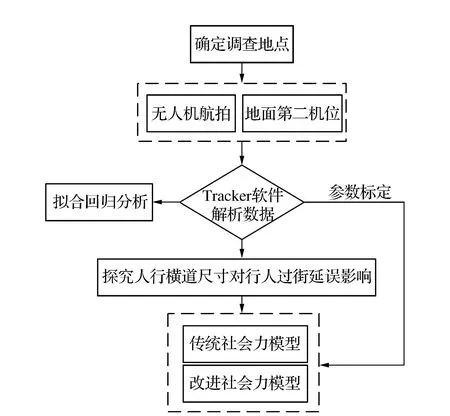
图1 数据调查与处理流程
1.1 数据采集
采用DJI MINI3 PRO无人机在人行横道上方约30 m垂直高空拍摄1080p 30帧视频,地面相机同步拍摄交叉口行人过街视频。
第一处调查地点选取哈尔滨市香坊区幸福路—乐园街西侧交叉口(以下简称幸福路),调查时间是工作日下午15:00—17:00,共获得427个行人过街样本。第二处调查地点选取哈尔滨市香坊区哈平路—三大动力路南侧交叉口(以下简称哈平路),调查时间是工作日下午13:00—15:00,共获得410个行人过街样本。调查地点详细信息描述如表1所示。

表1 调查地点详细信息描述
1.2 交叉口行人过街影响因素分析
行人性别、年龄、过街过程与右转车辆冲突严重性、行人流量大导致的行人相互穿越等因素都会对行人过街总体速度产生影响。为了深入分析各因素对行人过街速度的影响,文中将各因素进行建模分析。后文使用的模型参数说明如表2所示。
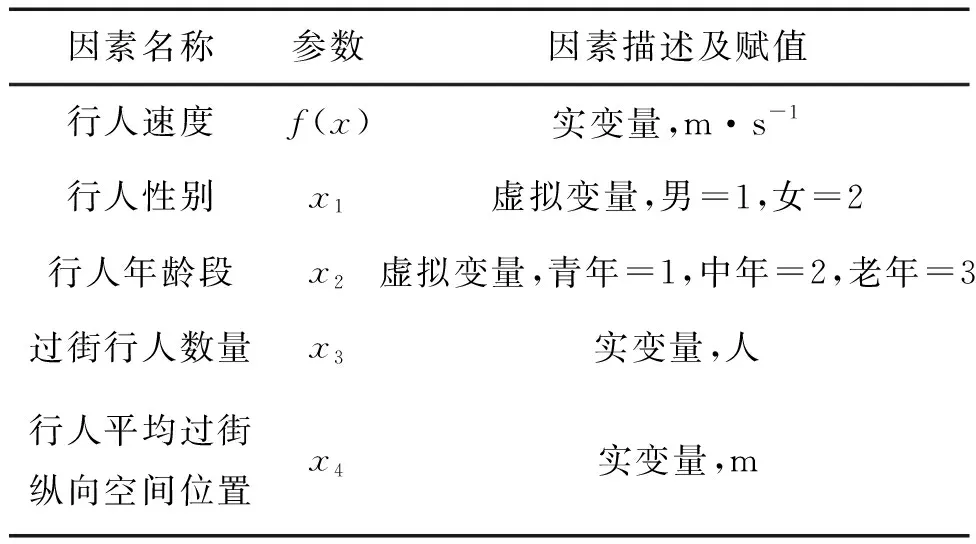
表2 模型参数说明
1.3 行人类型划分
行人年龄段分为青年人(15~39岁)、中年人(40~59岁)、老年人(≥60岁),视频中行人年龄、性别与行人过街人群数量由观察员采用双机位视频获取。
2 行人群体过街视频数据处理
2.1 视频数据处理
利用基于Open Source Physics(OSP)Java 架构下的Tracker软件分析无人机采集的视频,在交叉口建立坐标系,探究行人过街速度与行人过街空间位置(靠近车流一侧与中心岛一侧)是否有显著差异,坐标系如图2所示。
研究采用无人机在交叉口正上方拍摄的方法,可获取更多的行人运动变量。无人机在空中飞行时,受到风力和操纵稳定性的影响导致背景移动,行人过街速度数据在移动背景的采集可以用软件逐帧处理来弥补,如图3所示。

图3 Tracker软件获取行人速度
2.2 行人过街速度特性
从男性、女性行人过街平均速度Q-Q图上可以看出,观测值与预期正态值高度吻合,如图4所示。
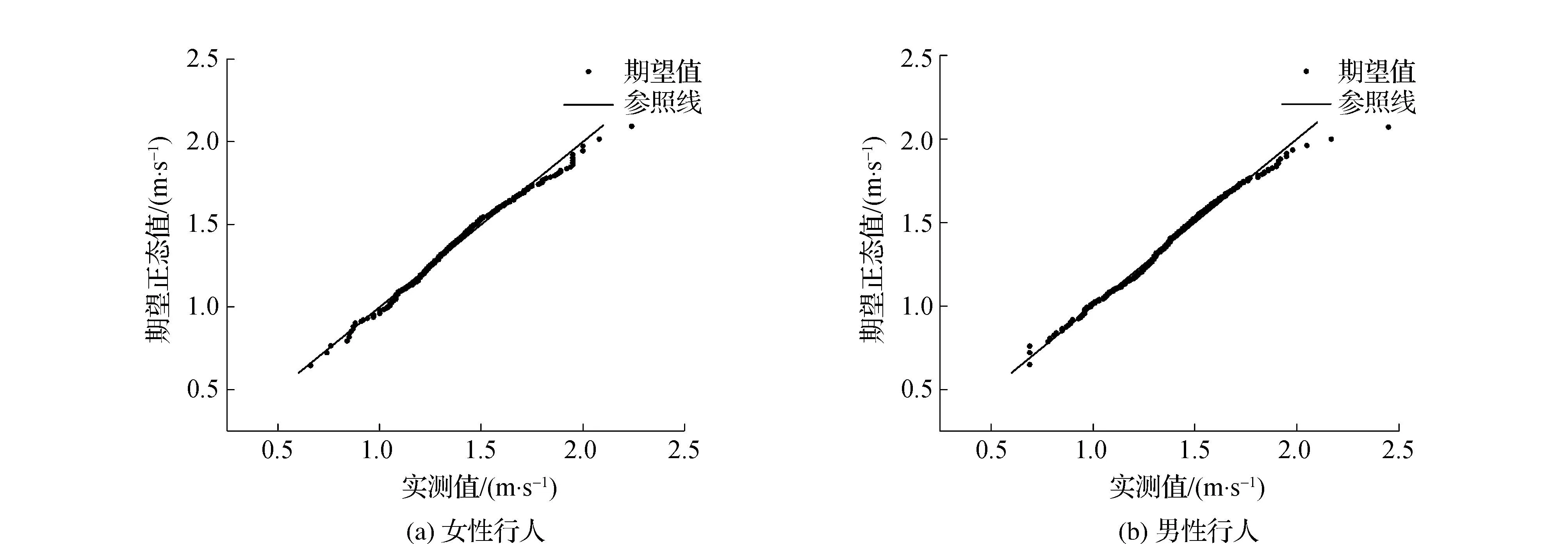
图4 行人过街速度正态Q-Q图
按照性别、年龄段、过街人群数量和行人过街受右转车辆影响等核心变量分类,得到有效行人速度样本837个,如表3和表4所示。

表3 幸福路行人过街速度特性
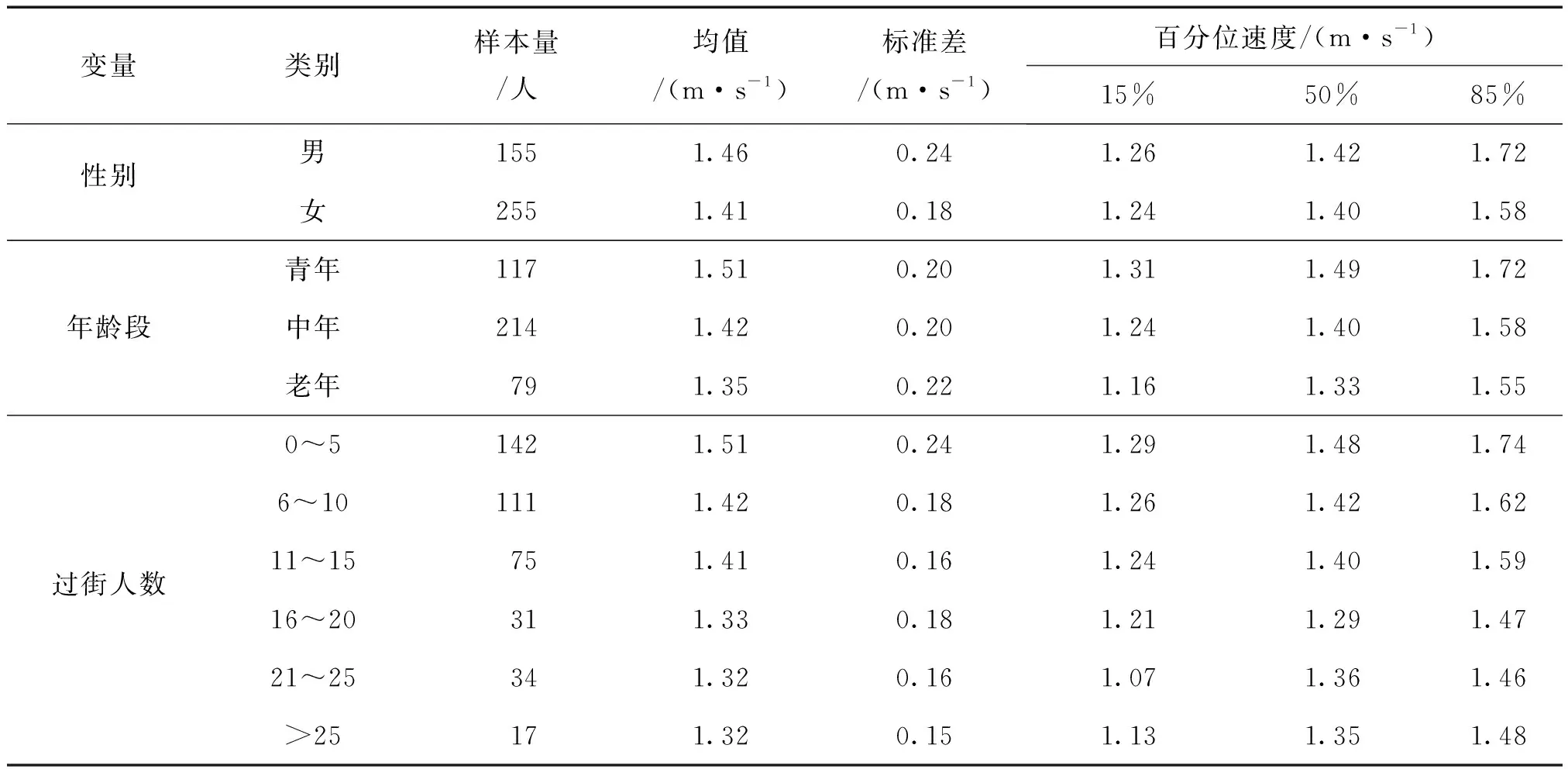
表4 哈平路行人过街速度特性
由表3和表4可知,由于身体生理机能影响,男性过街平均速度高于女性。在幸福路,男性行人过街平均速度为1.32 m·s-1,女性行人过街平均速度为1.29 m·s-1;在哈平路,男性行人过街平均速度为1.46 m·s-1,女性行人过街平均速度为1.41 m·s-1。
在幸福路,青年人过街平均速度最快(均值为1.45 m·s-1)、中年人次之(1.36 m·s-1)、老年人过街平均速度最慢(1.10 m·s-1)。行人过街速度随着过街人群数量增多有下降的趋势,当过街人群数量为0~5人时,速度均值为1.33 m·s-1;过街人群数量为21~25人时,速度均值为1.24 m·s-1。在哈平路中,青年人过街平均速度最快(均值为1.51 m·s-1)、中年人次之(1.42 m·s-1)、老年人过街平均速度最慢(1.35 m·s-1)。行人过街速度随着过街人群数量增多有下降的趋势,当过街人群数量为0~5人时,速度均值为1.51 m·s-1;过街人群数量为21~25人时,速度均值为1.32 m·s-1。
图5更清晰直观地看到行人过街平均速度随着年龄段上升呈下降趋势。
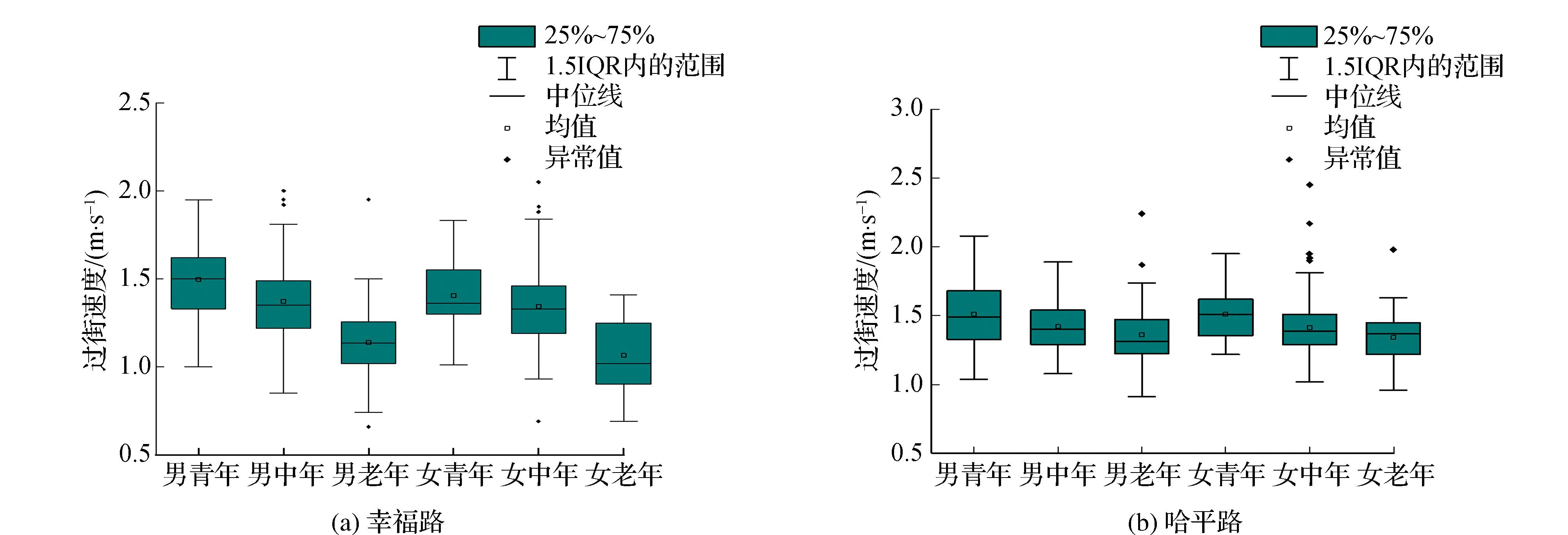
图5 行人速度箱线图
如图6所示,在映面坐标系中,X轴代表过街行人数量、Y轴代表行人过街纵向空间坐标、Z轴代表行人过街速度。行人在过街过程中,当过街人群数量较少时,行人过街速度较快。在图中不难看出行人过街时,纵向空间位置对行人过街速度并没有显著影响。分析原因:过街人群数量较少时,行人空间占有量大,可以选择较高的行走速度。而随着过街人群数量上升,行人相互之间阻滞力较为明显,就会降低行人过街速度。

图6 行人速度3D映射
3 行人过街速度回归分析
3.1 哈平路
利用SPSS软件拟合哈平路行人过街速度数据,得到行人过街速度回归模型:
f(x)=1.734-0.039x1-0.083x2-
0.045x3+0.008x4
式中:自变量定义如表2所示。模型R2值为0.179,且通过F检验(F=22.011,p=0.000<0.05)。另外,对模型多重共线性检验如表5所示,VIF值全部均小于5,表明不存在共线性问题。
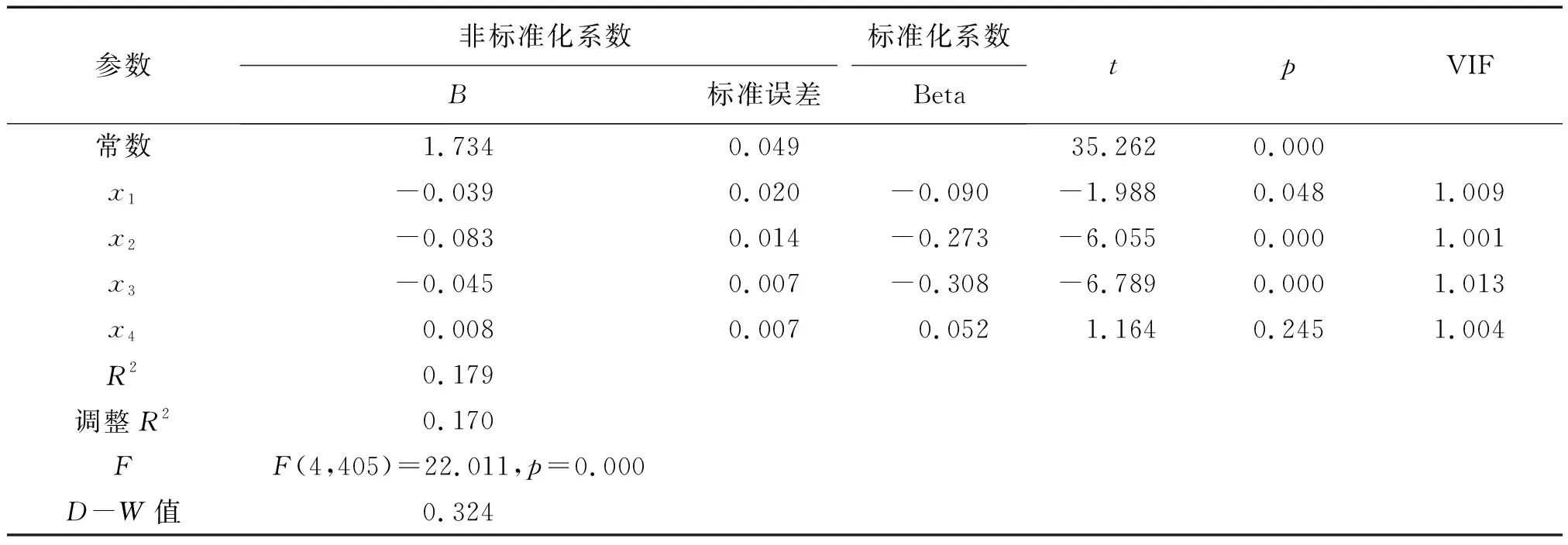
表5 哈平路行人速度回归分析
x1的回归系数值为-0.039(t=-1.988,p=0.048<0.05),说明男性过街速度明显高于女性;x2的回归系数值为-0.083(t=-6.055,p=0.000<0.01),说明行人年龄段与过街速度呈显著的负相关性;x3的回归系数值为-0.045(t=-6.789,p=0.000<0.01),说明人群数量与过街速度呈显著的负相关性;x4的回归系数值为0.008(t=1.164,p=0.245>0.05),说明行人处在人行横道不同纵向位置与过街速度无显著关系。
3.2 幸福路
利用SPSS软件拟合幸福路行人过街速度数据,得到行人过街速度回归模型
f(x)=1.877-0.049x1-0.195x2-
0.036x3+0.008x4
式中:自变量定义如表2所示。模型R2值为0.258,且通过F检验(F=36.619,p=0.000<0.05)。另外,对模型多重共线性检验如表6所示,VIF值全部均小于5,表明不存在共线性问题。
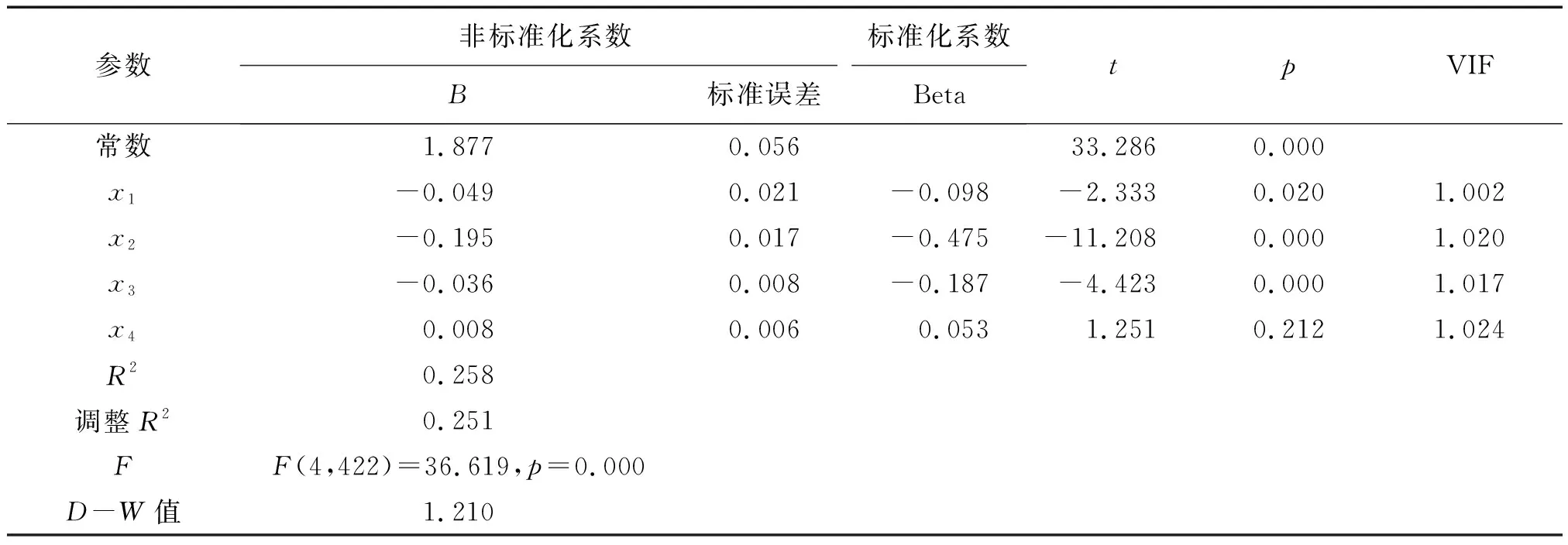
表6 幸福路行人速度回归分析
x1的回归系数值为-0.049(t=-2.333,p=0.020<0.05),说明男性过街速度明显高于女性;x2的回归系数值为-0.195(t=-11.208,p=0.000<0.01),说明行人年龄段与过街速度呈显著的负相关性;x3的回归系数值为-0.036(t=-4.423,p=0.000<0.01),说明人群数量与过街速度呈显著的负相关性;x4的回归系数值为0.008(t=1.251,p=0.212>0.05),说明行人处在人行横道不同纵向位置与过街速度无显著关系。
4 社会力模型仿真
4.1 模型构建
人行横道宽度设置一方面要尽量使所有行人处于人行横道保护范围内,另一方面应能降低行人过街延误,提高交叉口运行效率。选取行人实际过街速度与行人延误时间作为人行横道宽度设置的验证指标。
以行人过街视频处理数据为基础搭建仿真场景,结合幸福路和哈平路交叉口设计参数,分别建立24 m长、4~7 m不同宽度的无干扰行人过街行为仿真模型。基于MassMotion软件中的改进社会力模型和AnyLogic软件的传统社会力模型,3D仿真实验环境如图7和图8所示。
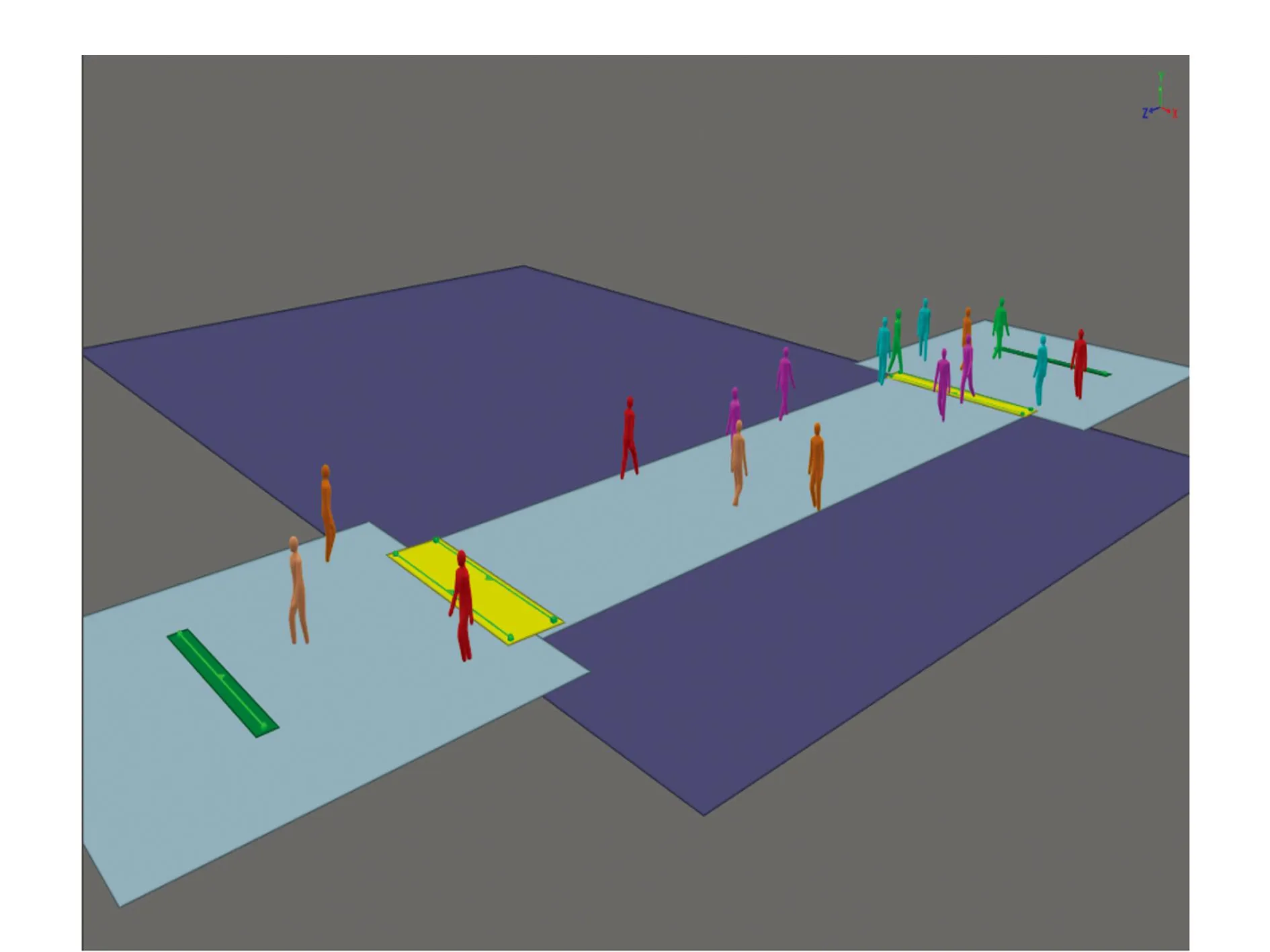
图7 MassMotion模型搭建
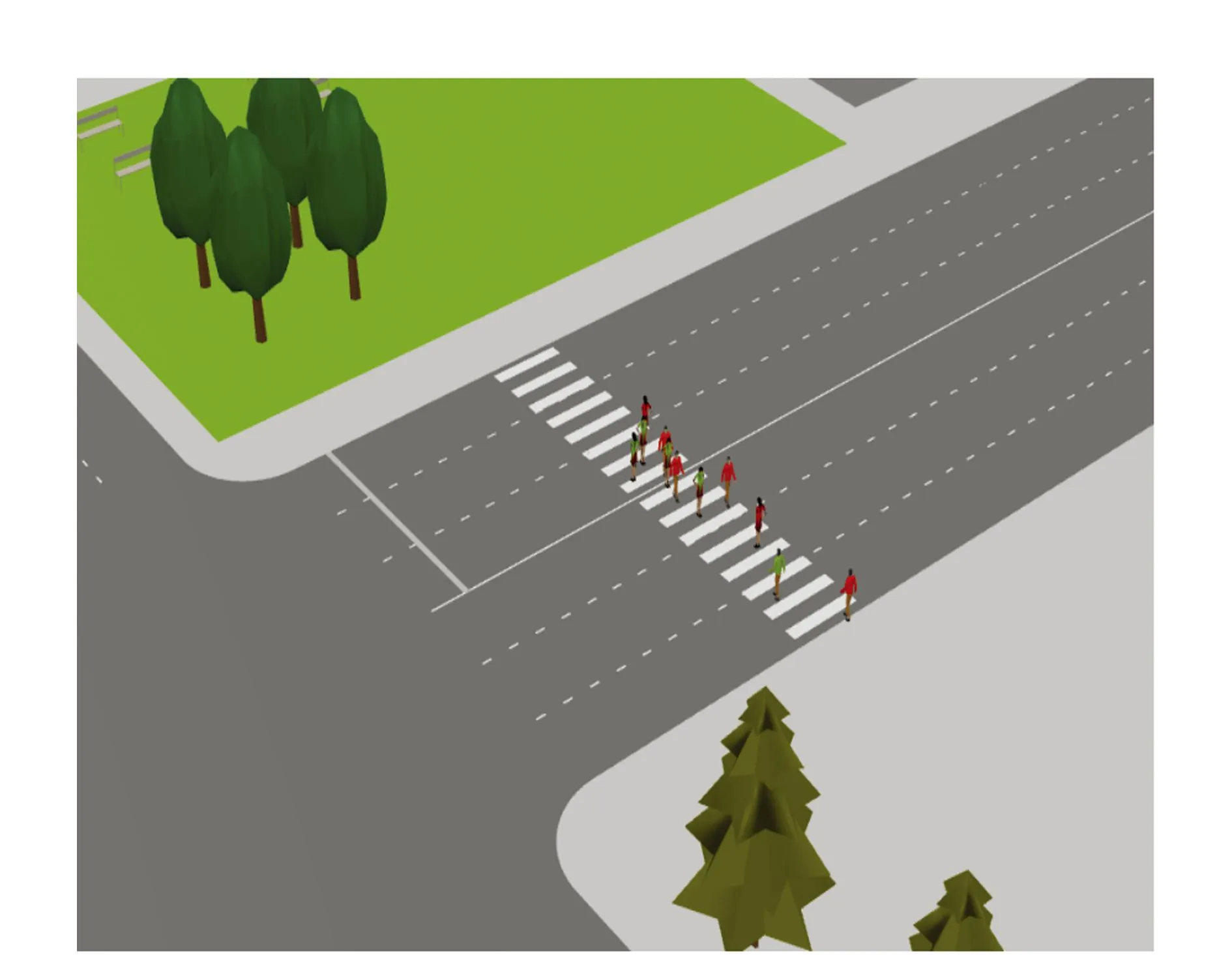
图8 AnyLogic模型搭建
4.2 行人过街参数设定
在以上模型中,男青年、男中年、男老年、女青年、女中年、女老年将从人行横道两侧产生,以Fruin标准移动。不同属性行人的平均运动速度、运动速度最值、体重是不同的。其中行人体重最小值为40 kg,最大值为80 kg,服从均匀分布。速度参量由文中实验得到,如表7所示。
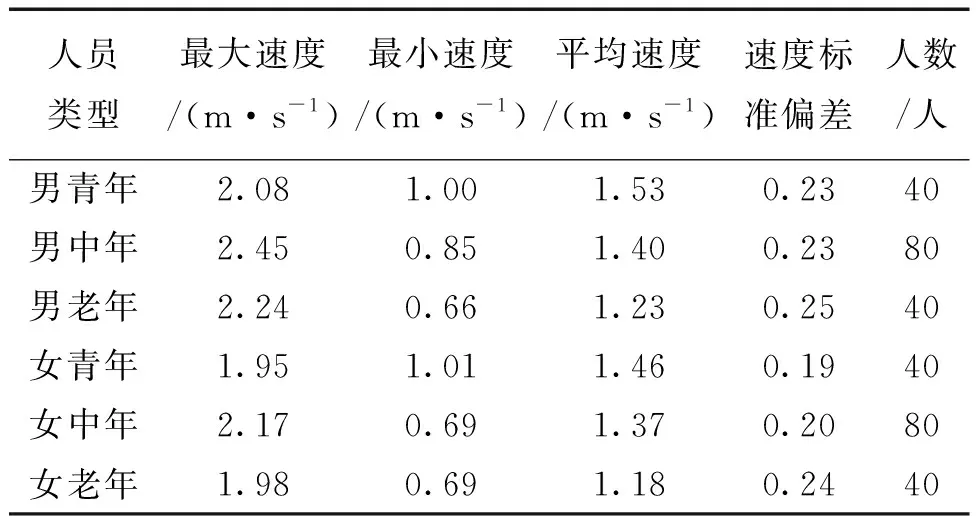
表7 建模行人特征属性表
4.3 社会力模型简介

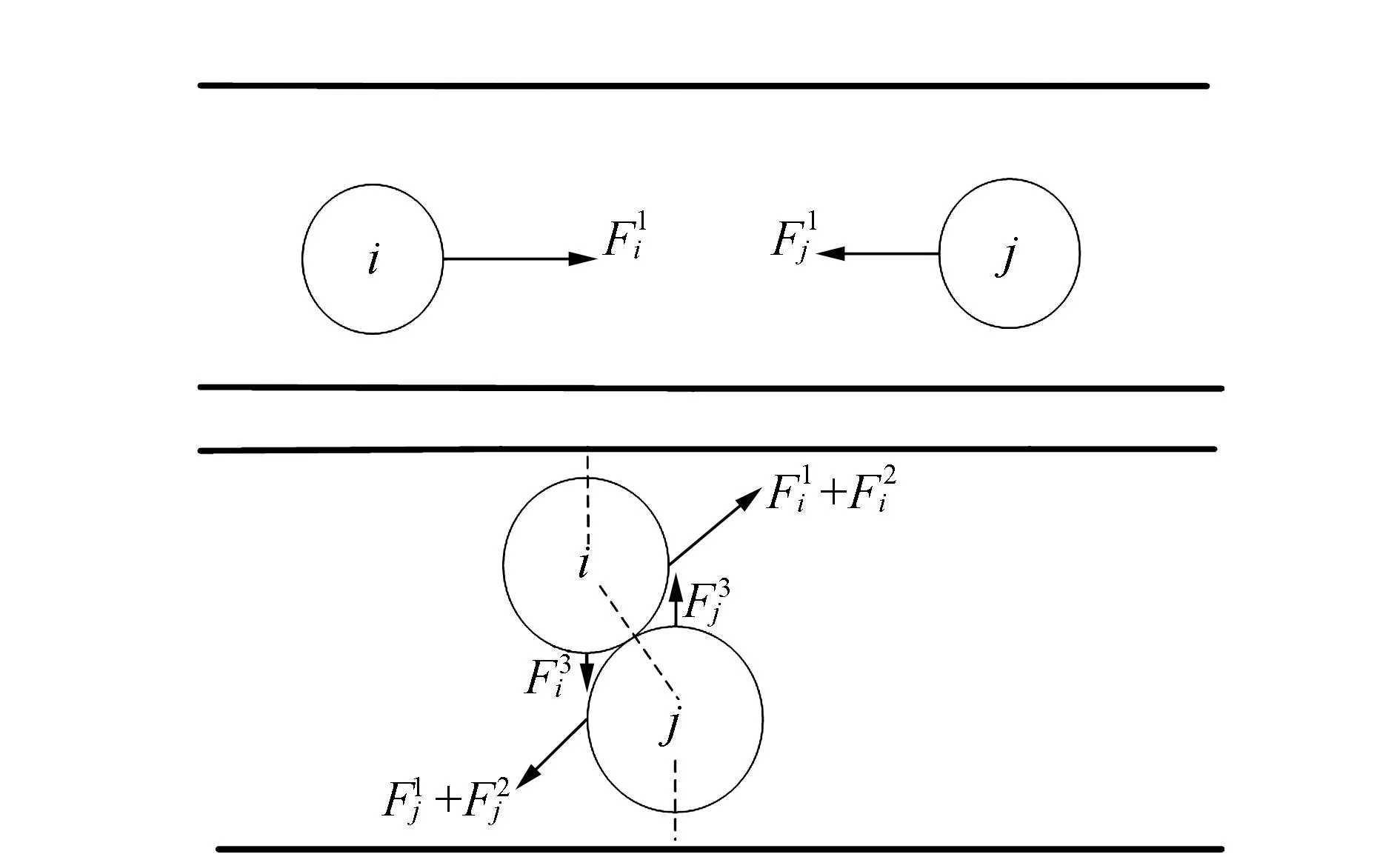
图9 传统社会力模型
(1)
(2)

而改进社会力模型包含了行人心理作用力及行人之间的主动避让力。行人与其他行人或障碍物之间作用力方程为
(3)
(4)
(5)

g(x)是一个分段函数,当个体之间距离小于个体之间半径之和时,则表示个体之间有接触,存在相互作用力;反之个体之间无接触,仅存在心理作用力。
(6)
行人在移动过程中预判下一时刻是否存在冲突,如不存在冲突,行人将沿距离终点最短路径继续行走;如果存在冲突,行人优先避让距离冲突时刻最近的行人。
‖(xjc+Vjctij)-(xic+Victij)‖≤r*ij
(7)
式中:xic,xjc分别表示行人i和行人j的当前位置;Vic,Vjc表示行人i和行人j的当前速度(m·s-1);tij表示行人i和行人j潜在冲突的时刻(s);r*ij是行人i和行人j可接受的临界距离。
与传统社会力模型相比,改进社会力模型中的行人增加了排斥强度因子,当行人之间的距离逼近行人设定的排斥力作用范围时,行人会在躲避的同时重新计算自己距离终点的最短路径,并执行改变轨迹的指令。改进社会力模型示意图如图10所示。

图10 改进社会力模型
4.4 仿真结果对比
为了分析无干扰环境下行人过街群体行为对过街时间延误的影响,文中通过2D仿真实验环境真实地表达行人过街的过程,如图11所示。
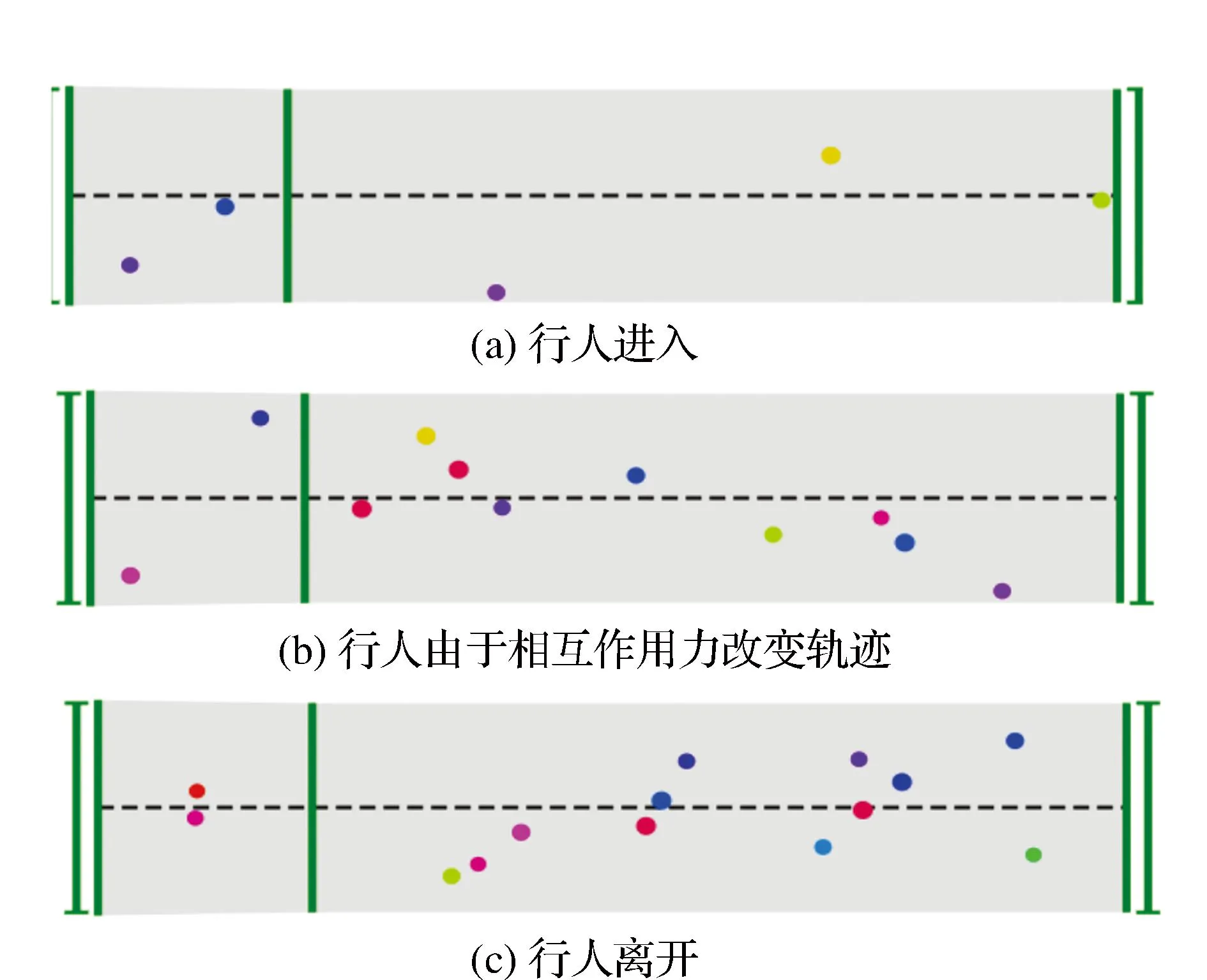
图11 行人过街行为2D仿真
由图11可知,无干扰情况下行人过街的主要延误来自于对向干扰,行人需要做出同向跟随、避让、调整路径等决策。
将实际参数输入AnyLogic的原始社会力模型和MassMotion软件的改进社会力模型中,行人到达函数服从均匀分布且总体数量不变,假设行人遵守交通规则,不存在违章过街行为。
如图12所示,统计分析了在不同人行横道宽度下,两种仿真软件中行人的实际过街速度与期望过街速度的比较,行人期望速度(1.37m·s-1)即行人自由流状态下的过街速度。数据对比如表8所示。

表8 行人过街速度仿真对比
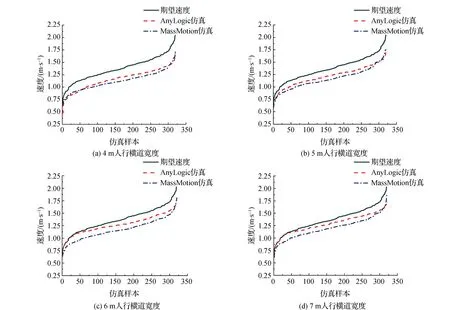
图12 基于不同人行横道宽度下的行人过街速度
由表8和图12可知,当人行横道宽度较低时,行人之间的阻滞效果相对明显,行人不得已降低自己的实际速度,过街人群消散相对困难;而随着人行横道宽度提升,行人之间的密度降低,减少了行人之间的冲突次数和路径重新规划次数,即行人之间的阻滞效果下降较为突出,显著提升了行人过街效率。
图13呈现出在两种仿真模型在相同环境下行人过街延误时间,人行横道宽度分别在4~7 m参数下,AnyLogic仿真中行人过街平均延误时间分别为4.22 s、3.47 s、2.57 s、2.28 s,MassMotion仿真中行人过街平均延误时间分别为3.56 s、2.91 s、2.78 s、2.26 s。两模型对比验证后,以上数据表明了增加人行横道宽度显著降低了行人过街时间,即降低了行人过街延误时间。
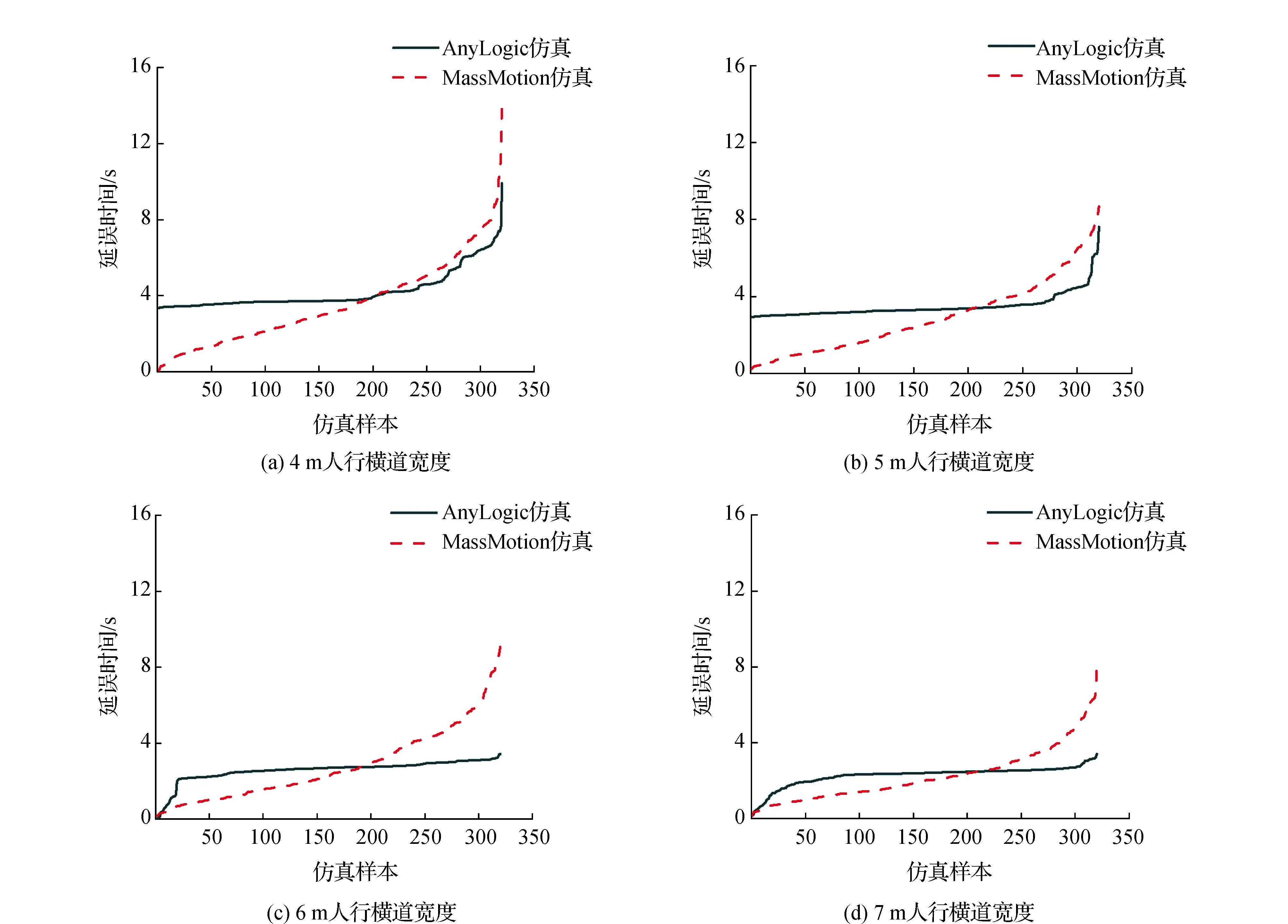
图13 基于不同人行横道宽度下的行人过街延误时间
5 结 论
文中以城市道路信号交叉口行人过街调查为基础,通过Tracker软件逐帧处理解析无人机航拍行人过街视频,得到行人群体过街速度,利用地面第二机位获得行人过街人群数量、年龄、性别、人行横道纵向空间特征等信息与过街速度的关系。具体结论如下:
1)利用SPSS数理统计软件分析837组过街行人数据,拟合得到行人过街速度近似服从正态分布。
2)对行人过街影响因素深入分析,行人属性与过街人群数量对行人过街速度有显著影响。利用SPSS软件分析行人过街数据,行人性别和年龄对过街速度有显著影响,行人过街速度与过街人群数量存在负相关的关系;行人过街速度与行人所处人行横道纵向空间位置无显著关系,即行人过街速度与行人过街空间位置(靠近车流一侧与中心岛一侧)不存在显著区别。
3)基于城市信号交叉口行人过街微观角度,搭建了传统社会力模型与改进社会力模型。采用哈尔滨市两交叉路口实际行人参数对两模型标定,探究得到人行横道宽度对行人过街延误时间影响。在道路两侧行人随机生成函数不变的基础上,人行横道宽度从4 m提升至7 m时,行人之间阻滞力明显降低。传统社会力模型仿真中行人延误时间从4.22 s降低至2.28 s。改进社会力模型仿真中行人过街延误时间从3.56 s降低至2.26 s。研究结果表明,在考虑行人过街时,合理增加人行横道宽度是改善交通运行效率的一种有效手段。
可依据上述结论,按照实际路段的交通流情况,为城市信号交叉口人行横道宽度的设计提供一定的理论参考。