破冰船电力推进系统在特殊工况下的控制策略
2024-01-20马吴涵马天宇徐铭阳
马吴涵,陈 颖,马天宇,徐铭阳
(1.中国船舶及海洋工程设计研究院,上海 200011;2.海装上海局驻上海地区第八军事代表室,上海 200011)
0 引言
船舶电力系统在船舶工程中扮演着至关重要的角色。电力推进技术已经成为多种船型中最有效的推进方式之一,为船舶领域带来了新的变革。破冰船是最早采用电力推进技术的船舶之一。由于极端的工作环境,对推进系统的性能和可靠性要求极高。电力推进系统的优势在于其对低温环境的适应性和更好的操控性能,以及电动机低转速大扭矩的特点,有利于应对不同的冰况和航行需求[1]。因此,许多破冰船采用电力推进系统来驱动螺旋桨,以增强其在冰层中的机动性。
本文旨在深入探讨破冰船的电力推进系统,特别关注在特殊工况下所面临的挑战以及解决方案。本研究将探讨如何克服由环境复杂性引起的船舶负荷变化对电力推进系统性能的影响[3],以确保破冰船在极端条件下的可靠性和安全性。
1 破冰船破冰工作模式分析
破冰船是在极寒水域执行任务的特殊船型,其主要技术挑战之一是应对不断变化的推进负载扭矩,以及在破冰操作期间对螺旋桨叶片施加的扭矩变化[4]。为了应对这些挑战,需要细化考虑不同工作模式下的扭矩变化特点,主要包括针对整船性能的破冰工况与倒车工况,以及针对螺旋桨的“冰堵”模式与“冰切削”模式。
①破冰工况
破冰模式是破冰船的主要工作模式之一。在这个模式下,船舶以高功率前进,船首的特殊设计和强大的推进力用来破碎和分离冰块。
②倒车工况(螺旋桨反转模式)
倒车工况是在遇到极端情况或需要迅速摆脱危险时采用的工作模式。在该工况下,破冰船停止前进,然后通过反向旋转螺旋桨以高功率进行倒车,以摆脱冰堵或危险的情况。反转模式通常用作应急措施,因为它可能对船体和设备造成一定程度的应力和损耗。
③冰堵模式
冰堵模式是指当破冰船的螺旋桨遇到坚硬的固体冰块时,螺旋桨卡死的情况。这种情况下,船舶可能会停滞不前或移动受阻。解决这一问题的方法是通过改变螺旋桨的旋转方向或使用其他设备来解除冰块冰堵。
④冰切削模式
冰切削模式是指破冰船的螺旋桨遇到浮冰或浮冰片时,需要将其切割或分解为更小的块以便船舶可以通过。在这种情况下,螺旋桨叶片必须施加适量的扭矩来削减或分裂冰块,以降低阻力并推动船舶前进。
因此,破冰船的电力推进系统扮演着至关重要的角色[5]。系统必须提供足够的功率和扭矩,以克服水面冰层带来的巨大阻力,同时保持船舶的良好机动性。破冰过程中频繁的急停和倒退操作对电力推进系统的设计提出了极高的要求,要求其具备出色的动态响应能力和可靠性,以确保破冰任务的成功完成。深入研究和不断改进破冰船的电力推进系统对于提高极地航运的效率和安全性具有重要意义,也是当前研究领域的一个重要课题。
2 亚马尔型液化天然气(LNG)船
2.1 电力推进系统架构
亚马尔型LNG船舶符合俄罗斯船级社最高规格的ARC-7破冰设计,能够破开2.1 m厚的北极冰[6]。
如图1所示为该船的电力推进系统接线图,该系统由三个额定功率为15 MW的推进器组成。推进变频器是三台ACS 6000,它们由对称的两个配电板供电。设计的关键优势在于冗余的电网架构提高了系统的可靠性,无论哪个部分发生故障,都有两个吊舱可以继续使用。
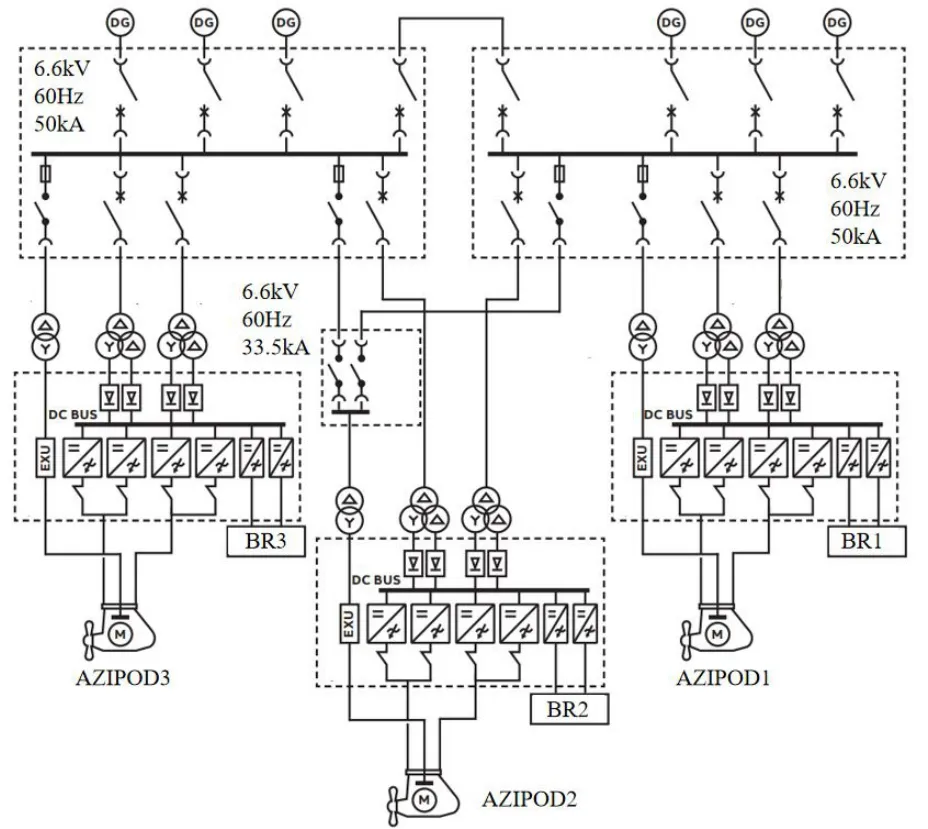
图1 亚马尔型船舶电力推进系统接线示意图
2.2 电力推进系统控制方案
为了应对ARC-7规格破冰任务中的特殊挑战,该项目采用了推进控制单元(PCU)来执行推进控制功能。
当电力推进的螺旋桨速度下降时,会导致输出负载减少。即在破冰船破冰时,螺旋桨组件通常会受到不规则的、强烈的扭矩干扰。解决方案是通过建立“过扭矩”模式从而稳定推进系统负载。ABB设计的ACS 6000驱动器可使扭矩达到额定的180%。由于螺旋桨与冰磨削等情况导致转速下降,而突破冰层并保持连续的转速运行时扭矩仍能不断增加,可以实现在螺旋桨速度下降的情况下,机械功率保持不变。
通过该方式,船舶能够在面对冰块等高阻力情况下,继续高效运行。这一方法确保了在极端环境下维持操作的稳定性和可靠性。
如图2所示,在功率一定的情况下,如果螺旋桨的转速降低到临界值(相应功率曲线与180%水平线相交),运行模式改变,PCU把扭矩限制在180%额定值。
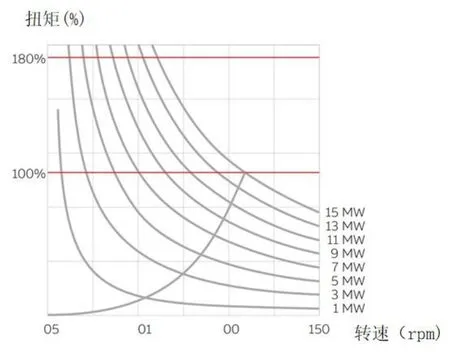
图2 亚马尔型船舶超扭矩工作模式
与船用柴油相比,LNG船舶通常使用液化天然气作为主要燃料。该气体能量密度较低,会影响电机在急停时所能承受的降速速率。为了避免电机控制单元(ECU)切换到船用柴油或其他情况导致电气保护装置触发跳闸,项目采取了以下策略:
①当发电量超过需求时,首先要降低原动机功率,尽可能减少产生多余的气体。
②如果有剩余发电量,利用推进器的能力尽可能地消耗多余电力。
③如果还有剩余发电量,启用电阻器把多余的电力转化为热能。这个针对破冰模式的功能叫做“负载银行”(Load Bank)功能[7]。
通过这些策略的协同作用,系统的可用性得到提高,确保了在各种工作情况下,电力系统能够稳定运行。这一方案相对于现有的解决方案在性能方面表现出色。
3 USCGC Healy破冰船
3.1 电力推进系统架构
破冰船USCGC Healy是柴油电力推进系统,包括电压调节、整流器、直流母线/滤波器、逆变器、PWM 驱动控制器、永磁同步电机型推进电机、轴和螺旋桨。
USCGC Healy破冰船具有AC / AC环形转换器驱动器,其数据可用于与由PWM驱动系统供电的PMSM进行比较。PMSM 模型参数包括永磁体的磁通量、参考电流、转矩常数和电机绕组阻抗。搭载两个15000马力的双绕组推进电机。发电机组模型为柴油驱动的四台7.2 MW、6.6 kV、三相、514 rpm同步电机。选择12脉冲型整流器电路作为PWM电机驱动应用的AC/DC转换技术。直流母线配有一个0.005 F电容器。使用绝缘栅双极晶体管 (IGBT)逆变器,由直流母线供电。
3.2 电力推进系统控制方案
针对破冰特殊工作状态,该船使用基于速度控制的矢量控制方法,该算法的核心思想是将推进系统的控制从实际的三相电压和电流转换为虚拟模拟值,这些值在一个旋转的二相坐标系A、q中计算,其中q轴指向转子磁通矢量方向。
在这个二相坐标系中,我们认为电机的电压和电流是恒定的,类似于直流电机控制原理。该类型的电机系统具有最佳动态性能,能够在外部扰动作用下维持输出参数的稳定性。
为了验证控制系统在冰船遇到的各种操作场景中的稳定性,文献[8]识别和量化PWM驱动器对电能质量的潜在影响,对航行破冰工况、紧急倒车工况以及螺旋桨冰切削模式进行仿真。
3.2.1 破冰工况
当船只遇到冰时,敞水阻力曲线失效。所需速度增加到143 rpm,时间延长到65 s,使推进系统能产生足够的推力以抵消冰施加给船体的阻力。
从图3可以看出,PMSM电机电流在达到速度设定点之前达到最大值。

图3 破冰情况下的系统响应
3.2.2 倒车工况(紧急倒车)
在紧急倒车测试中,前进方向上以8m/s的初始船体速度初始化,上层控制器给出一个控制指令,将转速设定为143 rpm(15 rad/s)。在t =10s时,控制器发出了一个-143rpm(全倒车)的指令,测试运行的结果如图4所示。

图4 紧急刹车模式下系统响应
USCGC Healy的设计规格要求在25 s内实现全功率反转。可以看出,在完全倒车命令给出后的15 s后,电流出现了预期的反转,导致电机轴的旋转方向发生了变化。最终实现了要求的-143 rpm的轴速度。
这项研究的结果初步显示,采用PWM的控制系统作为破冰船电力推进系统的技术选择是可行的。性能测试模拟了在整个负载范围内实现稳定运行。
4 俄罗斯22220项目核动力破冰船
4.1 电力推进系统架构
俄罗斯22220项目破冰船的电力推进系统采用电动机组作为推进动力,每个电动机组由两个转子共轴的异步电机组成并连接螺旋桨。异步电机的定子绕组由单独变频器供电,变频器又分别由多个变压器供电。部分推进电路如图5所示。

图5 22220项目破冰船推进系统简化示意图
该推进系统架构旨在提供足够强大的动力以应对极端的北极环境条件,确保这些破冰船能够有效地开展任务。
4.2 电力推进系统控制方案
4.2.1 控制模式
该类型破冰船的电力推进系统具有两种控制模式,分别为转速控制模式与功率控制模式。这两种模式的转速和功率变化如图6所示。

图6 控制模式与螺旋桨的转速功率变化曲线
两种控制模式的目的是适应不同工作需求,特别是对于特殊工况,如“冰切削”和“冰堵”情况下的电机工作要求。由于电磁体的制造差异,定子和转子相互感应的不同,导致两个电机在同样的控制信号下产生不同大小的电流。
为了解决两台异步电机之间的电流不平衡问题,需要对矢量控制算法进行调整。根据参考文献[9],调整方案的核心是在电磁矩控制器中引入电流差异校正信号,以确保两台电机在各种工作模式下都能够平衡地分担负载。优化后的算法考虑了不同工作模式下的电流差异,在特殊工作模式下,算法会自动根据实际情况进行调整,以确保电机在不同负载条件下都能正常运行,降低过载风险。
4.2.3 螺旋桨冰切削模式与“冰堵”模式
图7展示了电动推进系统的桨叶转速、总电磁矩以及在启动和加速到5.23r/s(50 rpm)后,切换到“冰切削”模式和“冰堵”模式期间,每个电机单独产生的电磁矩的曲线图。
在模拟过程中,使用了参考文献[10]中的电力推进系统的计算机模型。在图8中,呈现了在相同工作模式下两台电机同名定子绕组流经的电流差异曲线图。
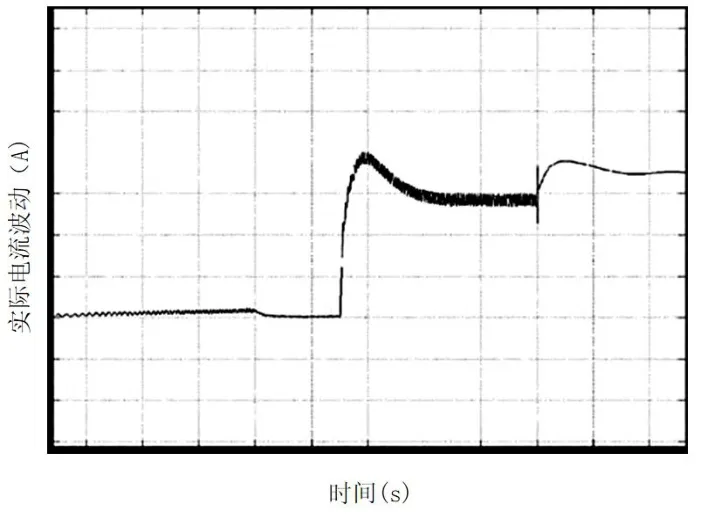
图8 两异步电机同相定子绕组实际电流差异变化曲线(启动并加速至5.23 r/s并过渡到冰切削)
由图7和图8分析可知,两台异步电机之间相同相电流的实际值差异分别为150 A(“冰切削”模式)和190 A(“冰堵”模式)。对于变频器来说,它需要承受超过额定值约两倍的输出电流,即其中一台电机将承受额外负载,导致故障,引发紧急情况。
图9与图10是基于优化算法的电机特性变化曲线。经过对比可知实现了同名绕组电流的平衡,电机从逆变器中消耗的电流在最严重的“冰堵”模式下的差值不超过4 A。如果不进行校正,“冰堵”模式下电流的差值将达到190 A(图8)。

图9 机组的总转速、电磁转矩和每台异步电机的电磁力矩变化曲线(启动并加速至5.23 r/s并过渡到冰切削)
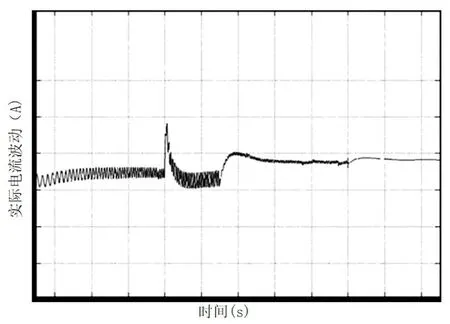
图10 两异步电机同相定子绕组实际电流差异变化曲线(启动并加速至5.23 r/s并过渡到冰切削)
4.2.4 倒车工况
除了"冰切削"和"冰堵"模式外,对于逆变器而言,倒车工况也需要考虑电流超载的情况。
图11和12是倒车工况(螺旋桨反转运行)时,无电磁力矩矫正的内部电机特性变化曲线,显示从5.23 r/s(50 rpm)到-5.23 r/s(-50 rpm)旋转频率的变化,该模式假设在敞水中进行。矩变化曲线(速度在5.23 r/s至-5.23 r/s的范围内变化)

图11 机组的总转速、电磁转矩和每台异步电机的电磁力矩变化曲线(速度在5.23 r/s至-5.23 r/s的范围内变化)
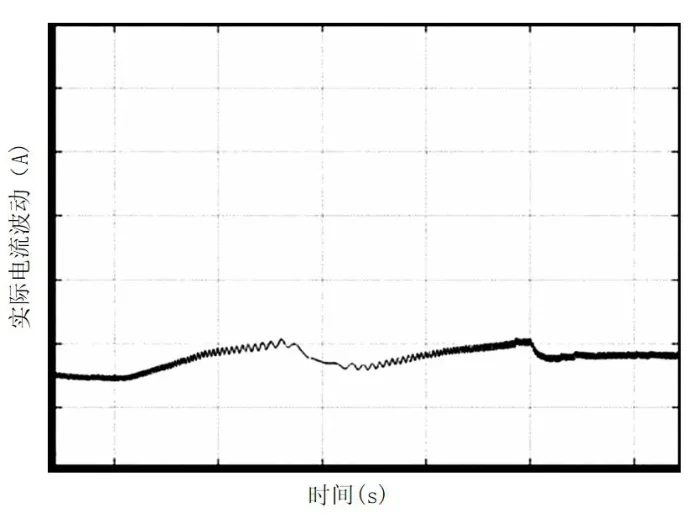
图12 两异步电机同相定子绕组实际电流差异变化曲线(速度在5.23 r/s至-5.23 r/s的范围内变化)
图13和14显示了在相同模式下,带有电磁力矩校正的电机特性曲线。对比分析可知在倒车过程中,使用校正导致了两个电机产生的电磁力矩的不平衡,从而实现了同名绕组电流的平衡(在没有校正的情况下,电流的差值达到100 A,在有校正的情况下,差值减少到1 A)。

图13 机组的总转速、电磁转矩和每台异步电机的电磁力
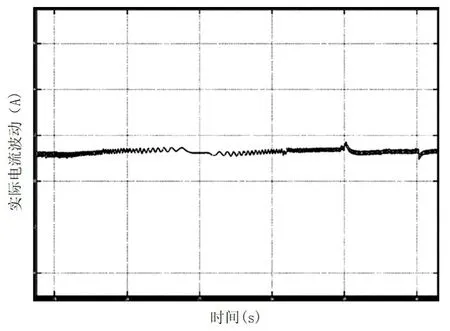
图14 两异步电机同相定子绕组实际电流差异变化曲线(速度在5.23 r/s至-5.23 r/s的范围内变化)
通过优化矢量控制算法,特别是在特殊工况下,可以提高电机系统的稳定性和性能,降低紧急情况的发生可能性。
5 结论
通过深入探讨了亚马尔型LNG船、USCGC Healy破冰船以及俄罗斯22220项目核动力破冰船的电力推进控制系统,包括其系统架构、控制方案和特殊工况下的性能,旨在总结其关键特点和控制策略,有助于加深对电力推进技术在破冰船领域的应用和性能特点的理解。本文突出了各种电力推进系统的特点和优势,针对特殊工况如破冰、倒车和冰切削等工况,在亚马尔型LNG船的案例中,引入了"过扭矩"模式和一系列控制策略,以稳定推进系统的负载,提高了在极端环境下的稳定性和可靠性;USCGC Healy破冰船采用了柴油电力推进系统,探讨了PWM变频器在破冰船上应用的可行性;俄罗斯22220项目核动力破冰船采用了串轴电机组,通过引入电流差异校正信号,改善不同工作模式下的电流不平衡的问题,提高稳定性。这些策略有助于为船舶设计者选择适合其特定需求的电力推进系统提供一定的指导。
未来还可以进一步研究其他特殊工况下的电力推进系统控制方法,探讨新的技术和创新,以不断提高船舶电力推进系统的性能和可靠性。
