基于自由矩阵的线性网络控制系统稳定性分析
2024-01-20张志翔肖伸平黄远鹏
张志翔,肖伸平,黄远鹏
(1.湖南工业大学 电气与信息工程学院,湖南 株洲 412007;2.电传动控制与智能装备湖南省重点实验室,湖南 株洲 412007)
0 引言
自20世纪90年代以来,网络控制系统(Natworked Control Systems,NCSs)迅速成为学术界和工业界的研究热点。并且在制造自动化、运输系统、智能机器人和电力系统等许多生产活动中对网络化系统功能的需求与日俱增[1-2]。与早期的控制系统结构相比,NCSs因其资源共享、等优点而受到广泛关注。
NCSs是一种由网络连接起来的空间分布式反馈控制系统[3],采集到的信息经网络信道从传感器传送给控制器,信号在传输到执行器之前由控制器进行分析和计算,执行器在执行相应的控制操作前识别并分析接收到的信息。然而,网络时延、丢包和乱序等问题在NCSs中广泛存在,这些问题将会导致系统出现性能降低、稳定区间缩小等不利现象[4]。近些年来,学者们对方面的研究也是取得了很多重要的结果[4-9]。例如,Li等[5]考虑到时变网络诱导延迟和数据包丢失,将网络控制系统转化为具有区间时变延迟的典型线性系统,并利用紧致积分不等式处理LKF的时间导数产生的叉积项,以获得保守度低得多的结果,但在泛函的改进和导数的估计上还有很大的提升空间。Lian等[6]提出了两个新的时滞乘积型LKF,其充分利用时滞d(t)与二次型函数的乘积信息以及时滞h-d(t)与二次型函数的乘积信息,取得了很好的效果,此LKF可推广到其他类型的时变时滞系统研究,如神经网络、网络控制系统等,为广大学者提供了新的研究方向。Phanlert[7]在LKF中加入了四重积分项,并基于推广的Wirtinger不等式来界定泛函导数积分项的方法已获得较好的研究结果,但由于没有考虑时延随机因素,导致研究成果的保守性较大,还有待进一步完善。Zeng等[8]提出了一种新的基于自由矩阵的积分不等式,将基于自由矩阵的积分不等式与分层划分方法相结合,可进一步降低推导出结果的保守性;并且用此不等式推广了一些现有的不等式,为具有时滞的系统的研究提供了一个新的见解。而long等[9]从另一个角度出发,提出了三次函数的一个负定义引理,该引理需要比以前的方法低得多的计算复杂度;并利用所提出的引理、增广LKF和二阶Bessel-Legendre不等式,导出了一个不错的时滞相关的稳定性准则。由此可见,基于不等式的LKF方法在时滞网络系统稳定性中发挥着关键性作用并且不断发展。
本文以LKF为出发点,构造出新的扩展LKF进行系统的稳定性分析。该LKF不仅包含了关于时变延迟的更全面的信息,而且使延迟和增强向量之间密切相关,可大大降低系统的保守性;然后使用广义的基于自由矩阵的积分不等式处理在LKF求导过程中产生的积分项,又使得线性网络控制系统的保守性明显降低;最后再基于二次函数的负定定理推导出新的稳定性准则。文章的结尾通过两个数值实例来说明本文方法的优越性和有效性。
本文采用如下标号:Rn表示n维的欧几里得空间;Rn×m代表n×m维的实矩阵;上标“-1”和“T”分别表示为矩阵的转置和矩阵的逆;diag{…}是指块对角矩阵,R>0表示矩阵是正定的;I和0分别代表有适当维数的零矩阵;并且Sym{X}=X+XT。
1 系统模型
考虑如下网络控制系统模型:
式中,x(t)∊Rn,u(t)∊Rm分别为系统的状态向量和控制向量,A,B是系统的矩阵,0φ是系统的初始状态。
假定在控制系统中,系统的控制器和执行器采用事件驱动,传感器则采用时间驱动[10]。在NCSs中,传感器、执行器和其他现场设备通过通信网络交换信息和数据。由于网络的固有特性,信息在通过网络的传输过程中不可避免地会出现通信延迟,即网络时延。图1是一个简单的NCSs原理图,假设系统以T为采样周期,传感器在kiT时刻的采样信号传输到执行器时间为τk,则闭环系统的总网络时延为τk=τsc+τca+τc。其中τsc为传感器到控制器的传输时滞、τca为控制器到执行器的传输时滞,τc则是控制器在计算过程中的计算时滞。
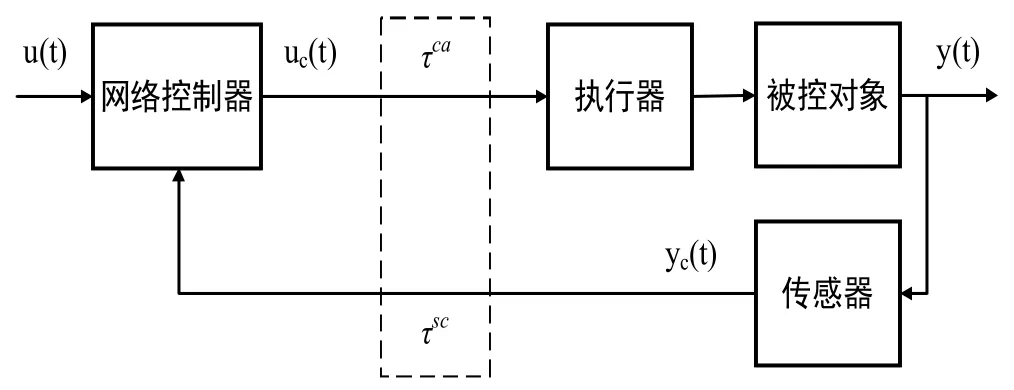
图1 网络控制系统原理图
若系统(1)是可控的,则基于网络控制器为:
其中,K是已知的系统的控制器增益,将(2)式代入(1)式中,就可以获得闭环网络化控制系统
式中,{i1,i2,i3,…}⊂{1,2,3,…}。当{i1,i2,i3,…}={1,2,3,…}时,系统不会出现丢包现象;当ik+1<ik时,旧数据包会比新数据包先到达被控对象处,从而会导致系统出现主动丢包现象。
由于x(ikT)=x(t-(t-ikT)),定义h(t)=t-ikT,t∊[ikT+τk,ik+1T+τk+1),k=1,2…,满足0<h1≤h(t)≤h2则NCSs可以表示为:
通过对时滞系统(4)的稳定性问题进行分析来得出网络控制系统的稳定性准则。
2 主要结果
在本节中,提出了一种新的扩展型LKF,它包含了更多关于延迟的信息。基于LKF,为所虑的网络控制系统开发了改进的稳定性条件。为了简化演示,我们定义了以下符号:
定理1 对于给定的标量h1和h1满足0<h1<h2,以及控制器增益K,如果存在正定矩阵P∊R7n×7n,Qi∊R2n×2n,Ri∊R7n×7n,(i=1,2),和任意矩阵N1、N2、N3∊R14n×3n,S1、S2∊R14n×n,使下列不等式均成立,则系统(4)是渐近稳定的。
其中:
证明:为了探讨网络控制系统的稳定性,构造如下LKF:
对LKF进行求导计算,可以得到:
可见LKF求导后出现了两个积分项,而这导致泛函的导数无法直接推导出具有线性矩阵不等式形式的稳定性条件。因此,如何进一步处理LKF导数中的积分项成为获得松弛稳定性条件的关键。
对于LKF中出现的两个积分项,利用文献[11]中提出的广义自由矩阵积分不等式进行界定处理,得到如下结果:
其中:
又对于任何矩阵S1和S2∊R14n×n,以下条件成立:
综上可知:
式中Ξ2、Ξ1和Ξ0被定义在定理1中。
对于h(t)∊[h1,h2],如果满足不等式(5),则(t)<0。因此,根据李雅普诺夫稳定性理论,可知系统(4)是稳定的,证毕。
注意不等式(5)是h(t)的二次函数,不能直接求解。
利用文献[12]中提出的引理2,使不等式(5)在转换为可解条件的同时,还降低了整个系统的保守性。下面是不等式(5)基于文献[12]中引理2的一个条件,在推论1中给出。
推论1对于给定的标量0<h1<h2,以及控制器增益K,如果存在正定矩阵P∊R7n×7n,Qi∊R2n×2n,Ri∊R7n×7n,(i=1,2),和任意矩阵N1、N2、N3∊R14n×3n,S1、S2∊R14n×n,使下列不等式均成立,则系统(4)是渐近稳定的。
式中Ξ21Ξ和Ξ0被定义在定理1中。
注释:与文献[16]中的LKF相比,本文运用的LKF在二次函数项的状态向量中扩展了状态向量的滞后项x(t-h1)和x(t-h2);在LKF的两个一重积分项的状态向量扩展中重点考虑加入了状态向量的导数项(s);并且也将两个滞后项x(t-h1)和x(t-h2)扩展到LKF的第二个一重积分项中;这些项的引入,使泛函的导数中包含更多的时滞信息与自由矩阵S1、S2相耦合,能有效的降低所得稳定性条件的保守性。其次,由于Ξ1和Ξ0中包含非线性项,须通过使用Schur补定理将推论1中的给出的条件转换成LMI,最后才能在Matlab中计算得出结果。
3 数值算例
在本节中,本文给出两个数值实例,来说明本文推论1的有效性。
例1 考虑到系统(4)具有以下参数:
分别取h1=0.05,0.1,0.15,0.2,取到不同h1的值下闭环系统(4)渐进稳定的最大允许时滞上界h2的大小,并将推论1的到的结果与文献[5]和文献[13]的方法进行比较,结果如表1所示。
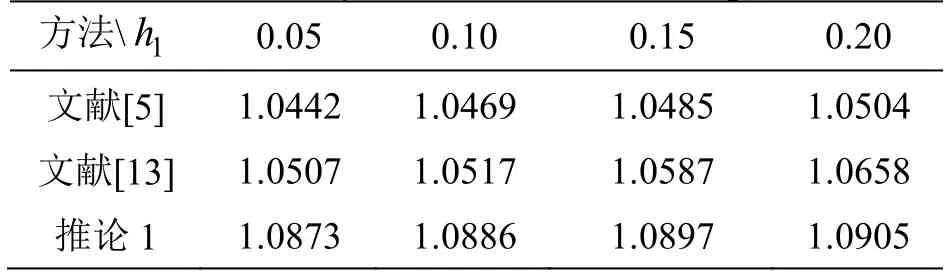
表1 不同h1值下获得的时滞上界h2的值
分析表1中的数据可知,根据本文推论1得出的最大时滞上限总体上大于列表中文献的结果。推论1与文献[13]对比。在h1=0.05时本文推论1得出的最大时滞上限是1.0873,而文献[13]中得出的结果是1.0507,由此说明了本文提出的方法获得的结果具有一定的优越性。
例2 考虑如下系统模型:
当考虑例2中所提供的参数时,所得的结果如表2所示。
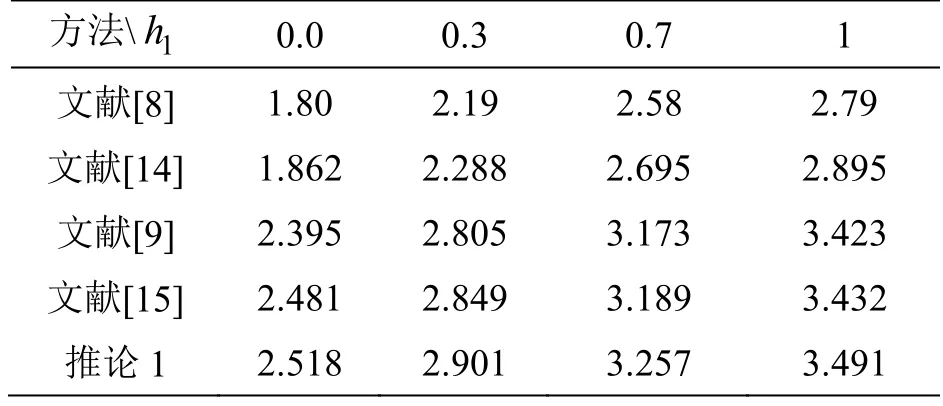
表2 不同h1值下获得的时滞上界h2的值
表2给出了系统(1)在另一经典例子中不同h1取值下得到的时滞上限。由表2可以看出,本文的新的扩展LKF考虑了更多关于时滞和系统状态的信息,使系统得到了更高的时滞上界,导出了具有更低保守性的稳定性准则,进一步说明了本文方法的有效性和优越性。
4 结语
本文主要对NCSs的稳定性问题进行了研究。针对以往研究中存在的不足,构造了一种新的具有增广的具有单积分项,双积分项和非积分项的改进LKF;在一重积分项的状态向量进行了大幅度的扩展,使状态向量之间的关系可以通过正定矩阵紧密的耦合在一起,对降低系统保守性起到了关键性作用。在此基础上,再运用自由矩阵不等式及二次负定定理对泛函的导数进行了界定处理,得出了一个具有更少保守性的稳定性判据。最后,通过两个数值算例进行仿真分析,并将其与现有文献中的方法进行了对比,得知本文所提出的方法可以得到更大的时滞上界,证明了本文方法的优越性。
