基于模型的船用燃料电池空气系统流量控制研究
2024-01-20池飞飞程蕾萌
张 望,池飞飞,程蕾萌
(1.武汉船用电力推进装置研究所,武汉 430064;2.武汉氢能与燃料电池产业技术研究院有限公司,武汉 430064)
0 引言
船用燃料电池发电模块空气系统为电堆提供满足要求的阴极反应物。空气进气流量、进气压力、进气温度和进气湿度是空气系统重要的工作参数,进气温度和进气湿度由燃料电池水热管理系统控制,船用燃料电池空气控制系统输出适当的过量空气系数及稍高的进气压力,对提高燃料电池工作性能大有帮助。
本文重点研究船用燃料电池空气系统建模技术及空气流量控制策略,完成空压机MAP图(流量-压比-转速特性曲线)离散化处理、空压机归一化流量与马赫数多项式拟合、空气系统MATLAB/SIMULINK模型搭建、基于台架数据的模型验证优化,并以该模型作为对象提取空气系统传递函数、仿真不同PID参数下控制策略的响应特性,初步验证了流量控制策略的可行性,为燃料电池流量控制系统台架调试提供依据。
1 空气系统数学模型
1.1 空压机数学模型
1.1.1 空压机MAP离散化处理方法
根据《XT-FCC300S两级增压无油离心空压机技术规格书》中提供的空压机MAP曲线,对空压机MAP图进行离散化处理和数据拟合,具体流程如图1所示。
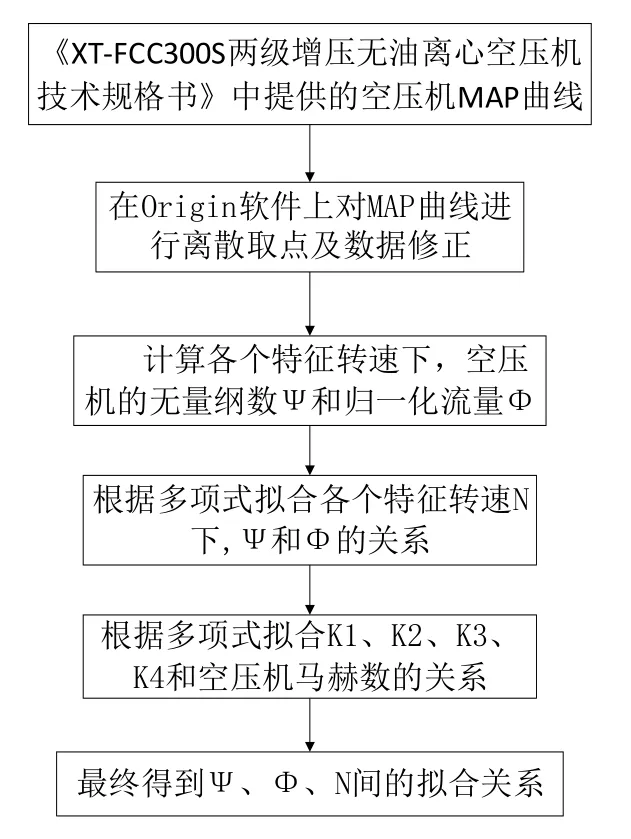
图1 空压机脉谱图离散化处理及拟合流程
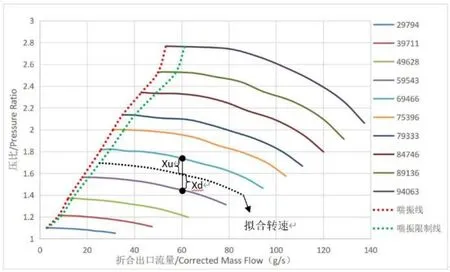
图2 空压机脉谱图及拟合转速方法
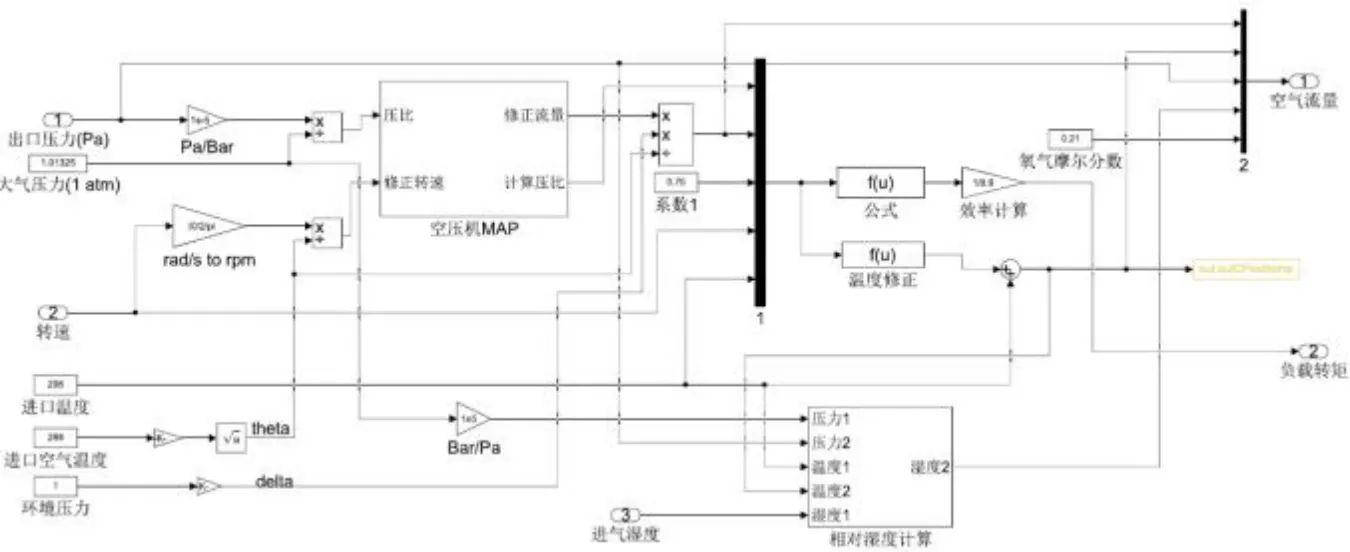
图3 空气系统模型
图4 空压机模型
由于空压机技术规格书中提供的转速数据有限,观察空压机MAP图不同转速下压比-流量曲线呈等斜率的特点,对相邻转速的曲线进行空间拟合,可获得更多的数据样本,进而提高空压机动态仿真性能,拟合公式如下:
式中:Xd—拟合转速和相邻低转速压比差值;
Xu—拟合转速和相邻高转速压比差值;
N—拟合转速值,r/min;
Nd—相邻低转速值,r/min;
Nu—相邻高转速值,r/min。
1.1.2 空压机MAP拟合曲线
采用多项式拟合方法,拟合出空压机各转速下归一化流量φ和无量纲数ψ的3阶多项式后,拟合系数如表1所示。

表1 空压机φ-ψ数据拟合结果
采用多项式拟合方法,拟合出空压机归一化流量φ、无量纲数ψ以及马赫数Ma的3阶多项式,多项式系数如表2所示。

表2 空压机φ-ψ/Ma数据拟合结果
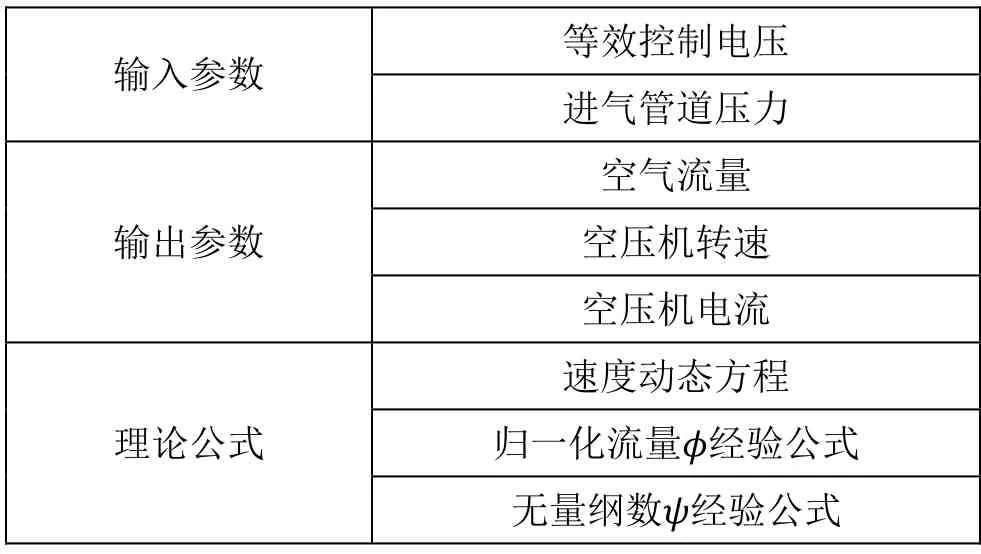
表3 空压机模型输入输出参数列表
表4 空压机建模仿真参数设置表
1.1.3 空压机流量公式
空气压缩机无量纲参数ψ和归一化流量φ数学表达式如下:
空气压缩机出口流量Wcp数学表达式如下:
1.2 节气门数学模型
船用燃料电池空气系统的另外1个核心控制部件是节气门,通过调节节气门开度可改变空压机出口压力,进而影响空压机压比和出口流量。研究空气系统性能时可将排气管模型等效为喷嘴流量方程模型。喷嘴流量方程如下:
式中:Cjqm—等效节气门系数;Rjqm—节气门压力损失系数。
通过节气门流量特性数据,可将节气门开度折算为等效节气门系数。
2 空气系统SIMULINK模型
船用燃料电池空气系统模型包括空压机模型、进气总管模型、中冷器模型及排气管道模型,空压机模型是空气进气系统模型的核心部分,建模原理为通过空压机MAP图拟合得到流量和压比/转速的经验公式,最终计算得出空气进气流量,其输入输出参数如表所示。
基于空压机模型,仿真不同转速下空压机的MAP曲线,如图5、图6所示。
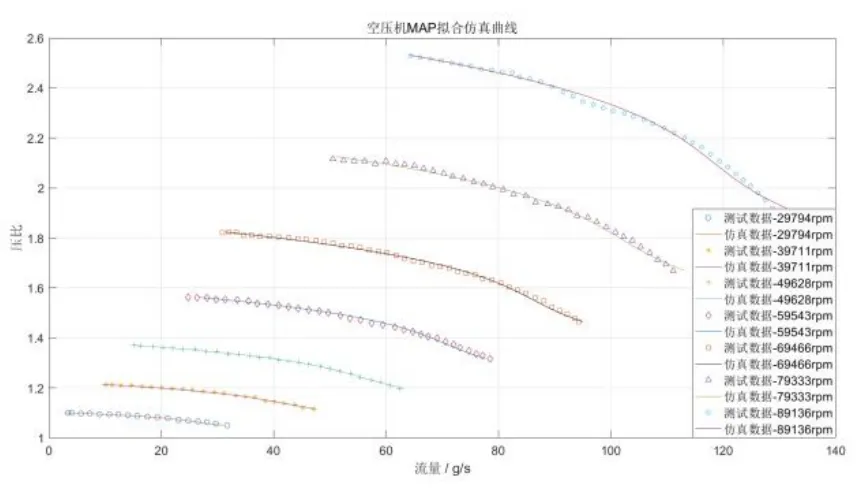
图5 空压机脉谱性能仿真曲线
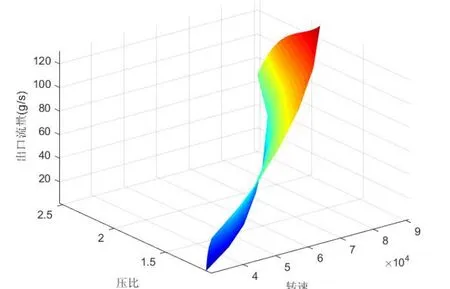
图6 空压机仿真脉谱三维图
空压机的MAP性能仿真实验小结如下:空压机MAP曲线采用多项式拟合方法,静态工况下拟合得到的流量与实际流量误差较小,满足空压机性能仿真要求。后续引入修正压比来调整动态工况下的流量,以满足空气系统仿真实验需求。
3 空气系统进气性能动态仿真实验
以RMZA-70K船用燃料电池台架测试数据为依据,设置负载电流、空压机转速、等效节气门系数来仿真船用燃料电池加载过程的进气性能。具体仿真过程如下:
0 s仿真开始,负载电流设置为140 A,10s负载电流突增设置为210 A,20 s负载电流突增设置为300 A,空压机转速及等效节气门系数同步设置,具体如图7。
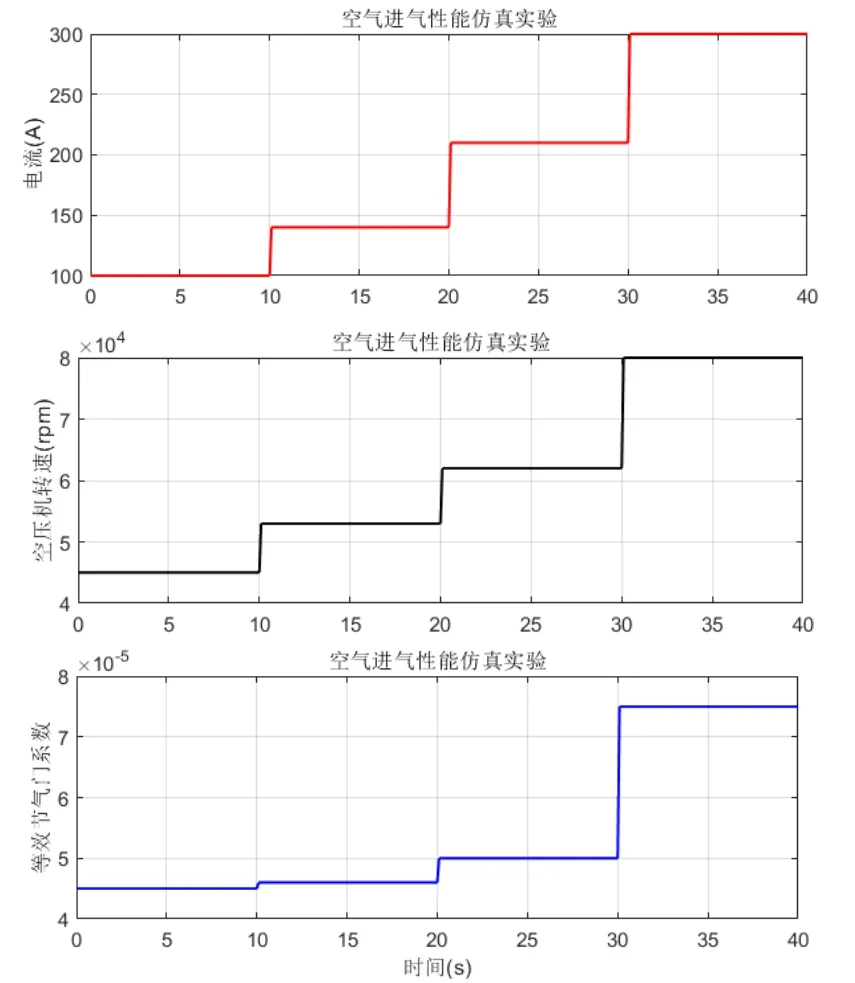
图7 进气性能动态仿真实验设置工况
空气进气压力和进气流量仿真实验曲线如图8、图9,仿真数据误差如表5、表6。
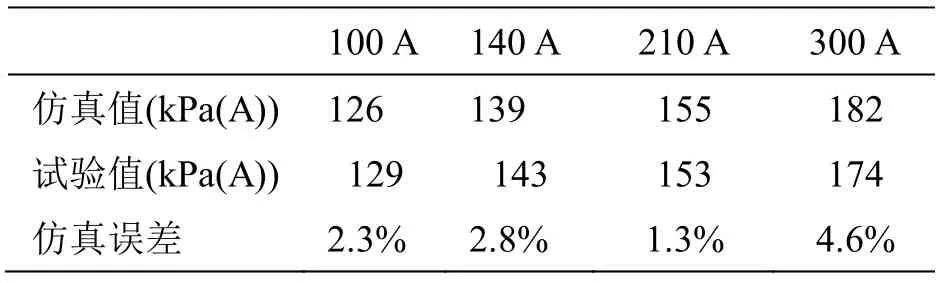
表5 空气进气压力仿真误差
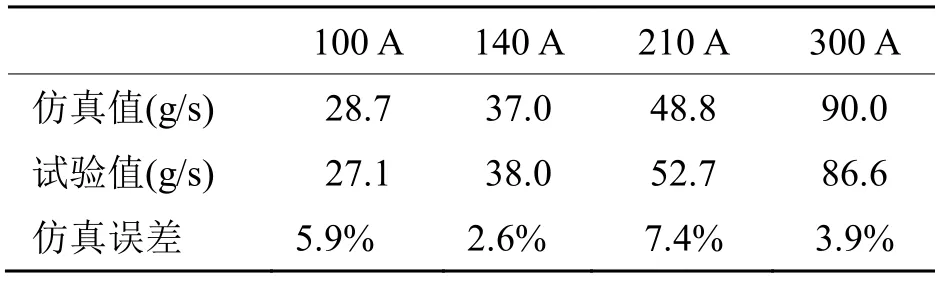
表6 空气进气流量仿真误差
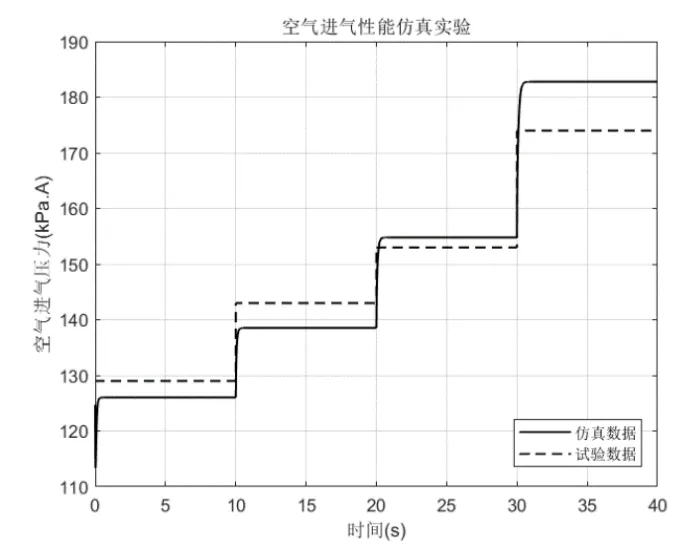
图8 空气进气压力动态仿真实验曲线
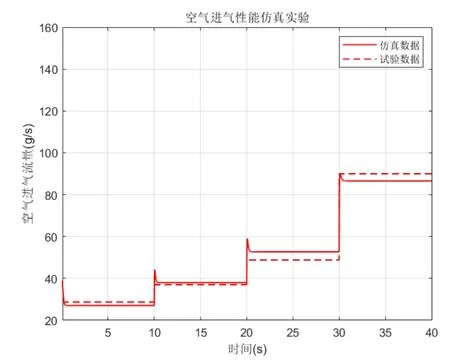
图9 空气进气流量动态仿真实验曲线
由仿真实验数据可知,船用燃料电池发电模块空气进气系统模型误差<10%,这主要由于以下原因导致:
1)空压机扩展转速MAP数据拟合,空压机归一化流量φ、无量纲数ψ以及马赫数Ma的3阶多项式拟合系数存在误差;
2)燃料电池空气管路参数无法精确测量,等效节气门系数根据试验数据拟合计算得到,部分经验空气常量设定带来误差等。
4 空气系统流量PID控制仿真
4.1 空气系统传递函数提取
在50%Pe工况下,给定如图10所示的等效空压机控制电压输入信号,可以得到船用燃料电池系统空压机转速、空气流量、空气压力的输出信号。
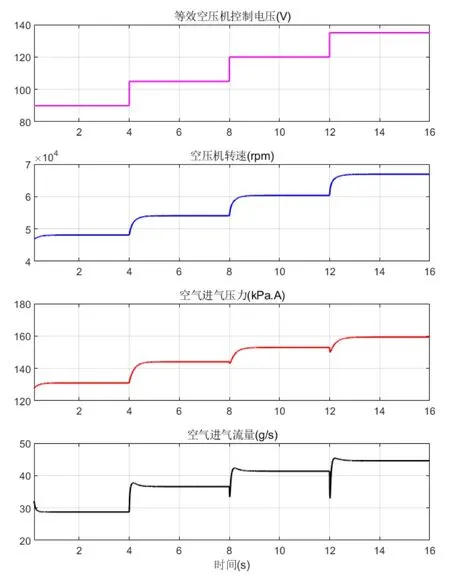
图10 空气系统仿真输入输出参数响应
根据图10的等效空压机控制输入信号、空气进气流量输出信号,利用MATLAB/System Identification工具箱,识别出空气供给系统模型的二阶传递函数(估算精度80.12%)。具体操作见图11。
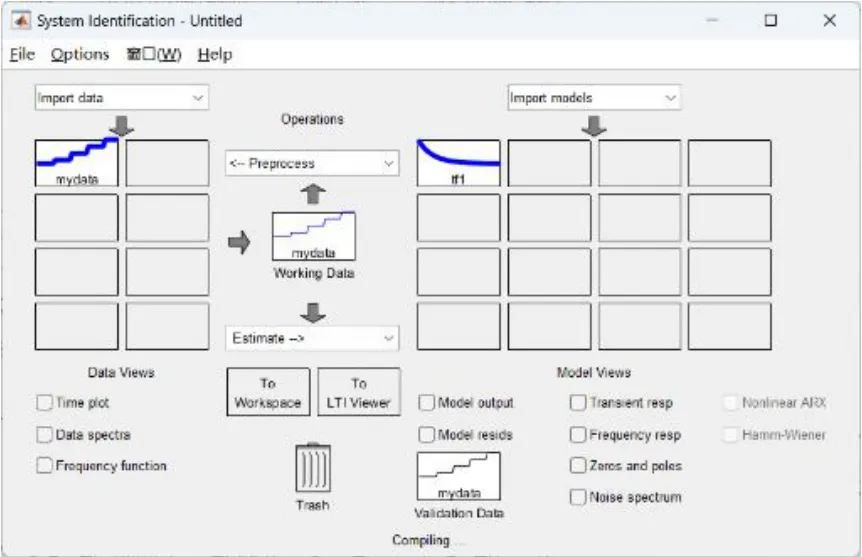
图11 空气系统传递函数参数辨识界面
识别得到传递函数:
在空气进气系统模型中建立传递函数模型,空气进气流量相应和实际空气供给模型空气进气流量进行对比,曲线如图12所示。
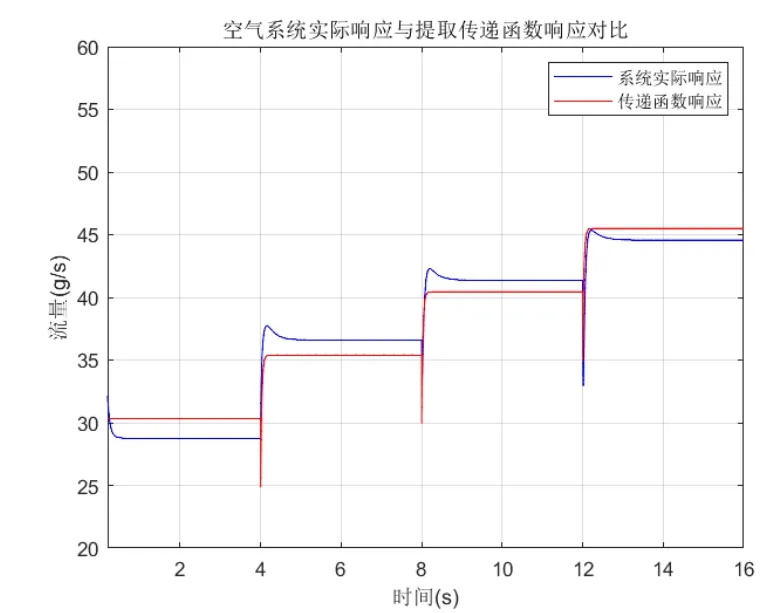
图12 传递函数与实际系统流量响应对比
4.2 空气系统流量闭环PID仿真研究
在空气进气控制模型中增加PID控制器,设置为PI模式,图13中v表示空气流量的设定值,u是空压机转速值,y表示空气流量的输出值。
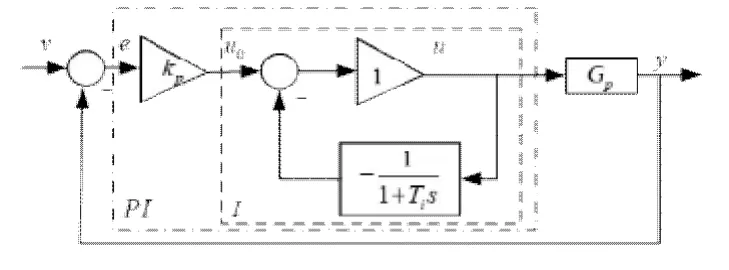
图13 空气流量比例积分控制原理
PID控制器参数调节由MATLAB/SIMULINK PID Tuner工具实现,在给定设定值v的情况下,三组不同的PI参数值的控制信号v如图14所示,输出信号y的响应曲线如图15所示。
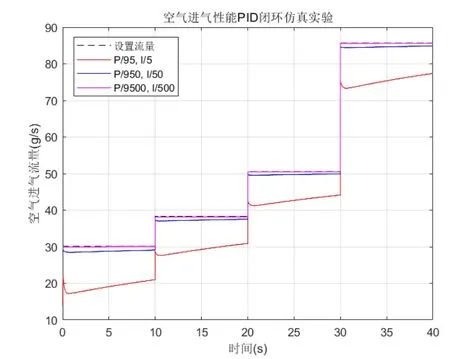
图14 空气流量比例积分控制流量输入曲线
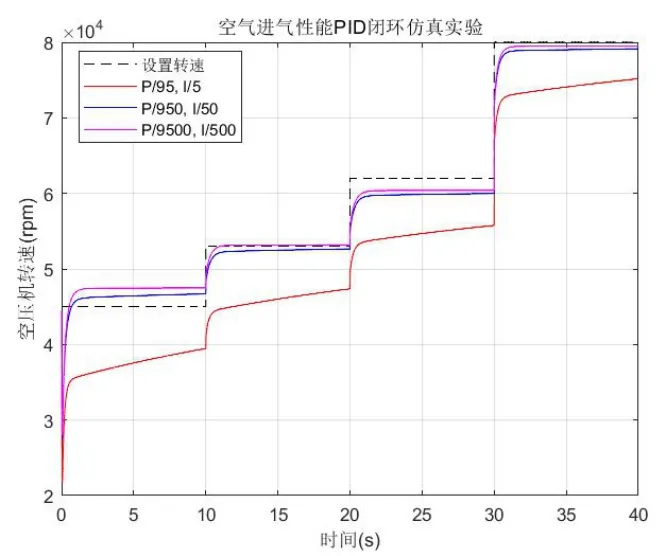
图15 空气流量比例积分控制转速输出响应曲线
图14、图15所示,在0 s时给定设定值v为30.1,10 s突增至38.3 s,20 s突增至50.5,30 s突增至85.7。可以看出当PI参数设置为95/5时,系统静态误差较大,且系统的响应时间很长;当PI参数设置为9 500/500时,系统的响应速度较快,未出现超调,满足船用燃料电池空气系统流量控制要求。
5 结论
本文主要完成了基于MATLAB/SIMULINK模型的船用燃料电池发电模块空气系统流量PID控制仿真研究,得到如下结论:
1)基于空压机MAP图和归一化流量参数数据拟合的空压机模型具有较好的空气系统流量-压比-转速响应性能,空气系统模型在引入空压机修正压比和等效节气门系数后,动态工况下仿真误差<10%,满足船用燃料电池空气系统控制策略仿真研究要求;
2)引入等效空压机控制电压参数用于空气系统传递函数辨识,获得等效空压机控制电压-空气流量的传递函数,验证传递函数的辨识可信度,并初步得到空气系统闭环控制特性。利用船用燃料电池空气系统流量闭环控制仿真实验获得了一组响应特性、超调量均满足要求的PID参数,为台架调试提供PID参数整定依据。
