深度学习在自动驾驶汽车中的应用
2024-01-20赵恩波于家旺王晓鹏曲强
赵恩波 于家旺 王晓鹏 曲强

关键词:深度学习;自动驾驶;卷积神经网络
中图分类号:TP399;TP183 文献标识码:A
0引言
自动驾驶技术是当今科技领域一个备受瞩目的研究和发展方向,它代表了现代交通系统未来的发展潜力。深度学习作为人工智能领域的一个重要分支,在自动驾驶中扮演着关键角色(图1)。
在过去的几年中,深度学习已经在计算机视觉、自然语言处理等领域取得了巨大成功。之后深度学习技术被引入自动驾驶领域,应用于包括环境感知、自我定位、决策与规划等方面。这不仅提高了汽车驾驶的安全性和效率,还给城市规划和交通管理带来了新的挑战和机会。
1深度学习基础
深度学习是一种机器学习方法,它模仿人脑神经网络的结构和工作原理,具有多层神经网络结构。在自动驾驶领域,深度学习被广泛应用于环境感知、决策制定和车辆控制等方面,使自动驾驶汽车能够识别和理解周围环境,做出安全可靠的驾驶决策。
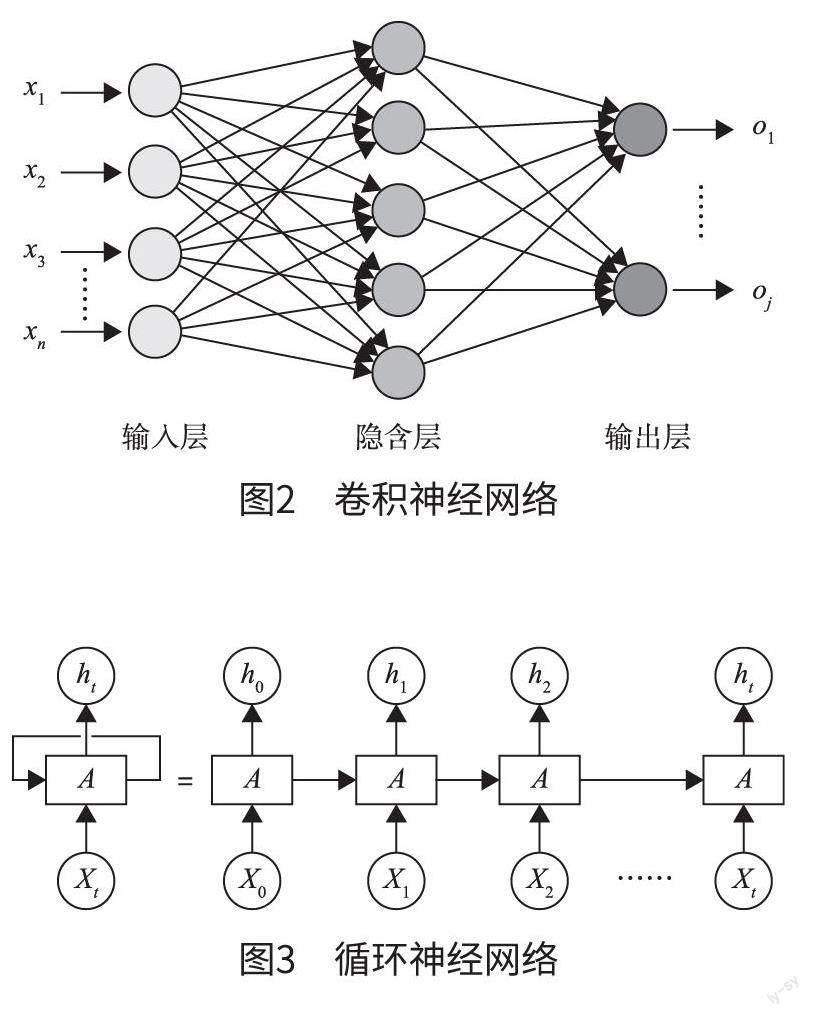
卷积神经网络(CNN)如图2所示,是一种专门为处理图像和视频数据而设计的深度学习架构。其核心构成部分包括卷积层和池化层,这些层能够高效地捕获图像中的特征,并逐渐提取更高级别的信息。
循环神经网络(RNN)如图3所示,是一种适用于序列数据的深度学习模型,它在处理具有时间依赖性的任务时表现出色。
2自动驾驶技术概述
2.1自动驾驶级别分类
自动驾驶技术根据车辆的自主性和驾驶任务的复杂性被分为多个级别。最常见的分类是根据美国汽车工程师学会(SAE)制定的六级分类系统,具体如下。
级别0(无自动化):车辆完全由人类驾驶,但可以有辅助驾驶功能。
级别1(辅助驾驶):车辆可以在某些情况下有辅助驾驶,如巡航控制、自动紧急制动等,但需要人类驾驶员监控。
级别2(部分自动化):车辆可以同时控制加速、刹车和转向,但人类驾驶员需要保持警惕并准备随时介入。
级别3(有条件自动化):车辆可以在特定条件下执行全部驾驶任务,但允许人类驾驶员在必要时介入。
级别4(高度自动化):车辆可以在特定条件下执行全部驾驶任务,无须人类驾驶员监控,但仍受限于特定环境。
级别5(完全自动化):车辆可以在任何环境下执行全部驾驶任务,不需要人类驾驶员干预。
2.2传感器与感知
(1)摄像头是自动驾驶汽车的主要感知设备之一,用于拍摄周围环境的图像和视频。深度学习技术常用于分析摄像头捕捉的图像,识别道路、车辆、行人和交通标志等关键信息。
(2)激光雷达通过发射激光束并测量其返回时间来创建高精度的三维地图。这些地图可用于障碍物检测、距离测量和环境建模,是自动驾驶汽车的重要感知工具之一。
(3)高精度地图包含道路拓扑、交通标志和其他重要信息。自动驾驶汽车使用这些地图来更好地理解周围环境,提供精确的自我定位和路径规划。
2.3控制与决策
(1)路径规划是保障自动驾驶汽车安全有效驾驶的关键部分。深度学习技术可以帮助车辆识别最佳路径,避开障碍物,并考虑交通规则和其他因素,以实现安全导航。
(2)车辆控制涉及车辆加速、刹车、转向和速度调整等方面的操作。深度学习控制算法可以帮助车辆实时调整这些参数,以适应不同的交通和道路条件,确保安全和舒适的驾驶体验。
自动驾驶技术是一种多领域交叉的技术,需要融合深度学习、传感器技术和控制系统。这些技术的发展将为实现更安全、高效和便捷的自动驾驶交通系统目标提供支持。
3深度学习在自动驾驶中的应用
3.1环境感知
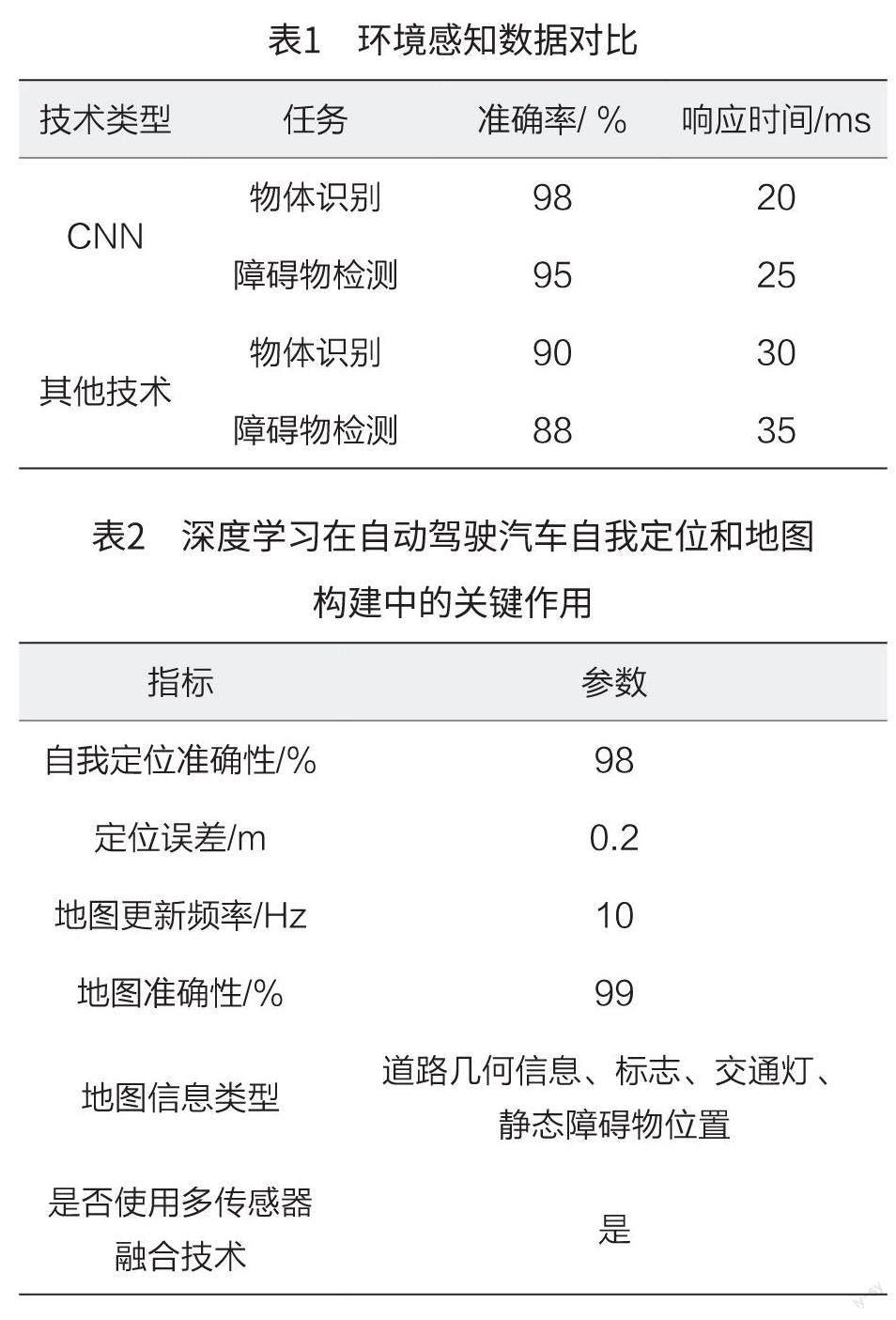
在自动驾驶汽车领域,环境感知被认为是至关重要的任务,因为它直接涉及对周围环境的准确、实时理解。深度学习技术在环境感知中扮演着关键角色,为自动驾驶汽车提供了先进的感知能力。表1为应用CNN与其他技术获得的环境感知数据对比。
深度学习模型通过处理来自各种传感器(如摄像头、激光雷达和超声波传感器)的数据,实时生成关于道路和交通状况的三维地图。
3.2自我定位与地图构建
自动驾驶汽车需要具备高度准确的自我定位和地图数据。深度学习模型(如循环神经网络和卷积神经网络)可以有效地融合来自不同传感器的数据,如GPS、激光雷达、摄像头和惯性测量单元(IMU)等,以精确定位车辆在道路上的准确位置,如表2所示。
深度学习在地图构建方面发挥着关键作用。通过车辆的传感器数据,特别是激光雷达和摄像头数据,深度学习模型能够实时构建地图,并不断更新地图信息。
3.3决策与规划
深度学习在自动驾驶的决策和规划阶段也发挥着关键作用。通过将深度学习模型嵌入到决策系统中,车辆能够在复杂的交通情况下做出实时决策。
决策深度模型计算公式如下:
D=f (E,R,O)。 (1)
其中,D为决策,即车辆在特定时刻的行动,如加速、刹车、转向等。f( )为深度学习模型,它接受环境数据E、道路规则R和其他车辆的行为信息O,并输出车辆的决策。
规划深度模型计算公式如下:
P=g(T,C,U)。 (2)
其中,P为规划,即车辆在一段时间内的路径规划,包括路线选择、变道和超车等。g( )为深度学习模型,它接受交通信息T、道路条件C和用户偏好U,并输出车辆的路径规划。
上述公式中,深度学习模型通过分析传感器环境数据(E)、道路规则(R)、其他车辆的行为信息(O)、交通信息(T)、道路条件(C)和用户偏好(U)来实现决策和路径规划,从而确保车辆在复杂的交通情况下能够做出安全、高效的驾驶决策和路径规划。
4结语与展望
深度学习在自动驾驶汽车领域的应用已经展现出巨大的潜力,并将继续在未来发挥关键作用。通过深度学习技术,自动驾驶汽车能够更准确地感知周围环境、做出智能化的决策以及规划安全路径。这不仅提高了驾驶的安全性和效率,还为城市交通系统和物流行业带来了深刻变革。深度学习模型的不断进步、自動驾驶技术商业化的加速以及社会对更安全、更智能的交通方式的需求,都将推动深度学习在自动驾驶领域的广泛应用和发展。