高超声速飞行器快速终端滑模保性能容错控制
2024-01-20王忠森廖宇新魏才盛戴婷
王忠森,廖宇新,魏才盛,戴婷
1.中南大学 航空航天技术研究院,长沙 410083
2.中南大学 自动化学院,长沙 410083
高超声速飞行器一般是指速度为马赫数Ma=5 以上的飞行器,具有飞行速度变化大、飞行空域广等特点。这些特点会使飞行器呈现出异常复杂的飞行特性,主要体现在由模型结构及模型参数等引起的强非线性、三通道运动模态等引起的强耦合性、跨大速域及大空域等所引起的快时变性、容易受到较大的外部干扰等方面。因此,有必要设计具有强鲁棒性的控制系统以保证飞行过程中的安全可靠[1]。此外,执行机构发生非致命故障会引起高超声速飞行器控制系统某些参数的突变,轻则降低姿态控制系统性能,重则导致整个飞行任务失败。因此,在恶劣飞行条件及执行机构非致命故障下设计有效的控制策略,使高超声速飞行器具备良好的容错性能,已经成为目前控制研究领域的一个重要问题[2]。
由于滑模控制(Sliding Mode Control,SMC)方法可以增强高超声速飞行器在模型不确定、外部干扰影响下姿态控制系统的鲁棒性,其已经成为该领域研究的热点[3]。文献[4]将干扰观测器技术和反步技术结合,设计了自适应滑模控制器,使具有输入约束、模型不确定和外部干扰的高超声速飞行器能够实现姿态高精度跟踪。文献[5]针对具有匹配扰动和非匹配扰动的可重复使用运载器,设计了一种连续多变量滑模控制器,保证了姿态跟踪误差在有限时间内收敛。快速终端滑模控制(Fast Terminal Sliding Mode Control,FTSMC)方法不仅可以实现系统状态的快速收敛,而且使系统状态具有有限时间或固定时间收敛的特性,现已被广泛应用于高超声速飞行器姿态控制研究中[6]。文献[7]提出了一种改进的非奇异快速终端滑模面,并结合自适应控制技术设计了快速自适应有限时间抗饱和容错控制器,以应对高超声速飞行器在外部干扰、执行机构故障和输入饱和条件下的姿态控制问题。文献[8]针对可重复使用运载器的再入姿态控制问题,基于快速终端滑模控制方法设计了新型干扰观测器,实现了对模型不确定和外部干扰的精准估计与补偿。
为进一步提升高超声速飞行器姿态控制系统的容错能力,将模型不确定、外部干扰和执行机构故障等效成复合干扰,并在控制系统中对复合干扰进行估计和补偿的研究策略取得了良好的效果[9-14]。文献[15]设计了新型的固定时间观测器,对包含模型不确定、外部干扰和执行机构故障的复合干扰进行估计,最后设计控制器实现了再入姿态的高精度跟踪。文献[16]设计了一种改进的滑模干扰观测器,用来准确估计高超声速飞行器受到的模型不确定、强外部干扰和未知执行机构故障,并将复合干扰估计值作为补偿设计了一种终端滑模控制器,使飞行器能够平滑地跟踪姿态指令信息。
为了使系统具有更好的控制性能,确保系统的姿态角跟踪误差保持在较小范围,需要对系统的瞬态性能和稳态性能有更深刻的认识。预设性能控制(Prescribed Performance Control,PPC)方法能够定量地刻画受控动力学系统的瞬态与稳态性能,因此在其被提出之后,迅速得到应用领域的关注[17-18]。文献[19]提出了一种新的无初始误差的预设性能函数,利用反步控制将高超声速飞行器跟踪误差限制在预设范围内。文献[20]设计了一种在高超声速飞行器非仿射模型基础上保证预设性能的反演控制方法,使速度和高度的跟踪误差均能实现较好的动态性能和稳态精度。文献[21]利用光滑函数将输入饱和作近似处理,基于预设性能函数来设计自适应容错有限时间控制器,约束了航天器姿态跟踪误差。文献[22]提出了一种基于预设性能和深度学习的分层容错控制框架,先利用故障诊断单元和最小二乘方法在控制分配层实现容错,然后结合扩张状态观测器设计了预设性能容错控制器,有效提高了高超声速再入飞行器姿态系统的容错能力。
对于高超声速飞行器姿态控制问题而言,非奇异快速终端滑模对模型不确定及外部干扰有较强的鲁棒性,能够保证系统状态准确地跟踪姿态指令信息,预设性能函数能约束系统的瞬态和稳态性能,使故障发生前后的系统状态能够尽量保持一致且变化平缓。基于此,本文研究了一种考虑预设性能的非奇异快速终端滑模容错控制方法。首先建立高超声速飞行器面向容错控制的模型,并通过引入性能函数和误差转换使气流角跟踪误差获得预先设定的性能;其次将模型不确定、外部干扰和执行机构故障等效为复合干扰,并设计新型滑模干扰观测器对复合干扰进行精确估计和补偿,然后设计了非奇异快速终端滑模容错控制器以提高控制系统的容错能力,最后通过数值仿真验证了所提方法的有效性。
1 问题描述
1.1 运动建模
本文以文献[23]中给出的一类高超声速飞行器为研究对象,研究其在模型不确定、外部干扰和执行机构故障下的姿态控制问题。假定高超声速飞行器为面对称的理想刚体,忽略地球自转对姿态运动的影响,其绕质心运动方程可表示为
式中:α、β和σ分别为攻角、侧滑角和倾侧角;p、q和r分别为滚转角速率、俯仰角速率和偏航角速率;Ixx、Iyy和Izz分别为绕x、y和z轴的转动惯量,Ixz为惯性积;Mx、My和Mz分别为滚转力矩、俯仰力矩和偏航力矩;其表达式分别为
其中:Cl、Cm和Cn分别为滚转、俯仰和偏航通道的力矩系数为动压;Sref为机翼参考面积;bA为机翼横向参考长度;cA为机翼平均气动弦长。
考虑外部干扰,以及由于模型简化和通道耦合引起的模型不确定,其模型可描述为
式中:ω=[p q r]T表示姿态角速率向量;Θ=[α β σ]T为气流角向量;u=[δaδeδr]T为等效控制输入;d1表示模型不确定,d2表示外部干扰。
矩阵I、Ω、Β1及R的具体表达式为
进一步考虑高超声速飞行器执行机构的增益故障和偏置故障,其故障模型可描述为
结合式(3)与式(8),建立如下包含模型不确定、外部干扰和执行机构故障的姿态运动模型:
假定复合干扰d是有界的,且其上界未知,其导数气流角指令Θd连续,其一阶导数和二阶导数一直连续且有界。
本文的控制目标可归纳为:针对如式(9)所示的姿态跟踪误差系统,克服模型不确定d1、外部扰动d2和执行机构故障的不良影响,实现跟踪误差e1和e2的快速收敛,且保证跟踪误差e1和e2满足预设的性能约束。
1.2 预备知识
对于x∈Rn且x=[x1x2…xn]T,定义sign(x)=[sign(x1) sign(x2) … sign(xn)]T。
引理1[24]对于xi∈R(i=1,2,3),z>1,0 <y≤1,不等式(12)和(13)成立:
引理2[25]考虑如式(14)所示的非线性系统:
式中:x0是状态量x的初值。
假定存在一个Lyapunov 函数V(x)满足:
式中:ζ1>1,0 <ζ2<1,φ1>0,φ2>0。则系统(14)将在固定时间内收敛,收敛时间T满足:
定理1考虑如式(17)所示的非线性系统:
式中:x(0)=x0(x∈R);l1,l2,m1,m2>0;0 <n1<1;n2>1;则式(17)是固定时间收敛的。
证明选择Lyapunov 函数为
对V(x)求导,可得
根据引理2,状态量x将在固定时间内收敛,收敛时间T(x)满足:
注图1 给出了m1,m2对式(17)中状态量x收敛效果的影响,参数设置为:x(0)=3;l1=5;l2=3;n1=0.8;n2=1.5;m1=m2;且其值分别为0.001,0.005,0.01,0.05,0.1。由图1 可知,m1,m2越小时,状态量x的收敛速度越慢,但其稳态精度越高;当m1=m2≤0.01 时,其收敛速度及稳态精度变化不大。
图2 给出了l1,l2对式(17)中状态量x收敛效果的影响,参数设置为:x(0)=3;m1=m2=0.01;n1=0.8;n2=1.5;l1,l2的值分别为10,5,0。由图2 可知,l1越小时,状态量x的稳态精度越高;l2越大时,其收敛速度越快。

图2 l1,l2 对状态量x 的影响Fig.2 Influence of l1,l2 on state parameter x
图3 给出了n1,n2对式(17)中状态量x收敛效果的影响,参数设置为:x(0)=3;m1=m2=0.01;l1=l2=4;n1的值分别为0.8,0.5;n2的值分别为2,1.5。由图3 可知,n1越大时,状态量x的稳态精度越高;n2越小时,其收敛速度越快。
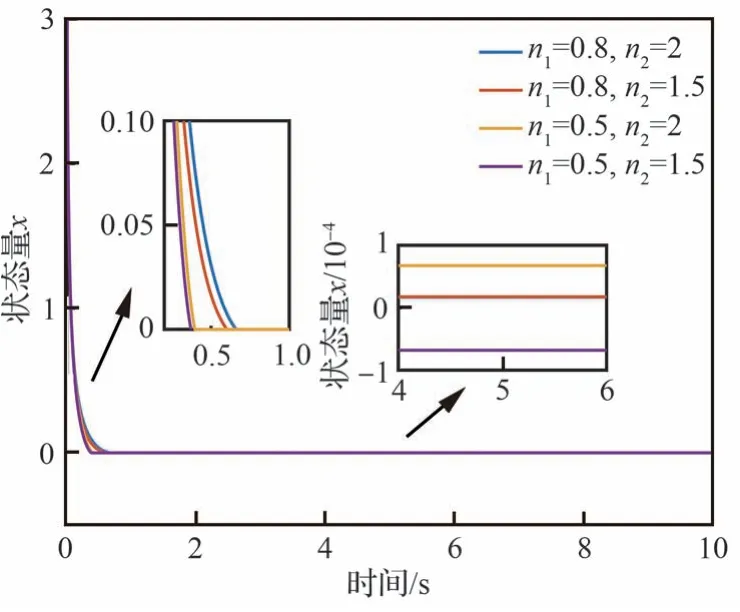
图3 n1,n2 对状态量x 的影响Fig.3 Influence of n1,n2 on state parameter x
2 基于预设性能的快速终端滑模容错控制方法
本文控制系统结构框图如图4 所示。首先,基于高超声速飞行器面向容错控制的模型,利用预设性能函数及误差转换对姿态跟踪误差系统的瞬态和稳态性能进行约束;其次,设计滑模干扰观测器,不仅精确估计包含执行机构故障、外部干扰和模型不确定在内的系统复合干扰,而且保证角速率跟踪误差的估计误差值始终停留在预设包络之内;最后,设计非奇异快速终端滑模保性能容错控制器,在执行机构发生故障后,提高系统的容错能力。

图4 控制系统结构Fig.4 Structure of control system
2.1 性能函数与误差转换
基于文献[26],考虑如下固定时间预设性能函数:
式中:ϖi(t)=-liTit/(Ti-t) (i=1,2,3);li>1;Ti>0;ρ0i>0 为性能函数初值;ρ∞i>0 为跟踪误差稳态范围。
定义如式(22)所示的函数:
为保证跟踪误差|e1i|<ρi,S(ε1i)应当满足以下条件。
1)光滑连续单调函数。
2)-1 <S(ε1i)<1
故设计关于转换函数ε1i的双曲正切函数为
进一步,可得如式(27)所示的转换误差系统:
2.2 滑模干扰观测器
设计滑模干扰观测器的滑模变量为
针对如式(11)所示的跟踪误差系统,参考文献[27],设计滑模干扰观测器:
式中:η0,η1>0是对d的估计值。
定理2选择合适的滑模干扰观测器参数,姿态角速率跟踪误差e2和复合干扰d将被准确估计。
证明对滑模变量s1求导可得
则对于单个通道,都有:
考虑Lyapunov 函数:
对V1求导,可得
定义函数:
注意到当|s1i0|<|s1i|<η0+η1e-t时必有F2i(|s1i|)>F2i(|s1i0|)=0,由式(34)可知,当F2i(|s1i|)>0 时必有F1i(|s1i|)>0;则当|s1i0|<|s1i|<η0+η1e-t时,F1i(|s1i|)>0。类似的,可证得当η0+η1e-t-1 <|s1i|<η0+η1e-t时,F3i(|s1i|)>0。令γ0=max{|s1i0|,η0+η1e-t-1},则当γ0<|s1i|<η0+η1e-t时,注意到V1也是关于|s1i|的增函数,当|s1i|不断增大且|s1i|>γ0时V1减小,|s1i|也随之减小。由式(33)可知,当|s1i|不断增大至趋于η0+η1e-t时,趋于负无穷,此时|s1i|的导数也会趋于负无穷。
由上述分析可得出如下2 个结论:
1)当γ0<|s1i|<η0+η1e-t时,F1i(|s1i|),F2i(|s1i|),F3i(|s1i|)均>0,即
2)滑模变量s1i将收敛至如式(38)所示的包络内:
现在分析复合干扰估计误差的收敛特性,当F2i(|s1i|)>0 时,必有:
化简式(39)可得
由式(29)、式(30)及式(41)可知:
若s1i与di同号时,可得
这与式(30)相违背,即s1i无法收敛至0 的某一小邻域内,故s1i与di异号,化简式(43)可得
当选取η0,η1使得η0+η1e-t→0 时,可使得
则由式(44)及式(45)可知:
注滑模干扰观测器参数η0,η1与滑模变量s1的收敛速度及稳态精度有关(即|s1i|<η0+η1e-t),进而影响对复合干扰的估计效果。通过选取合适的η0,η1,可以有效提高滑模干扰观测器的精度。
2.3 快速终端滑模保性能容错控制器
基于定理1,可设计非奇异快速终端滑模面为
式中:ξ1i,ξ2i>0;k1,k2>0;0 <α1<1;β1>1。
对si求导,可得
式中:k3,k4>0;0 <α2<1;β2>1;ξ3i,ξ4i>0。
设计非奇异快速终端滑模容错控制器为
定理3针对如式(27)所示的转换误差系统,在复合干扰被如式(29)所示的滑模干扰观测器准确估计之后,采用如式(53)~式(55)所示的非奇异快速终端滑模容错控制器,选择合适的控制器参数,转换误差ε1、ε2和跟踪误差e1、e2将在固定时间内收敛。
证明首先,在复合干扰被精确估计后,证明滑模面s将在固定时间内收敛。
考虑如式(56)所示的Lyapunov 函数:
单通道的滑模面导数可写为
对V2求导,可得
其次,在滑模面收敛后,证明转换误差ε1,ε2将在固定时间内沿着滑模面收敛。此时,可得
考虑如式(61)所示的Lyapunov 函数:
对V3求导,参考上述证明过程,可得
3 仿真验证与结果分析
本节利用MATLAB 软件对所提的容错控制方法进行数值仿真验证。飞行器的总体参数及气动参数均参考文献[28]。初始状态设置为高度30 km,经度0°,纬度0°,速度8Ma,速度倾角0°,速度偏角0°;气流角初值设置为攻角15°,侧滑角0°,倾侧角0°,姿态角速率初值均设置为0rad/s;气流角指令设置为攻角10°,侧滑角0°,倾侧角20°;实际舵偏角限幅20°,转动惯量偏差为+10%、气动系数偏差为+20%,三通道外部干扰力矩设置为
执行机构故障情况如表1 所示。

表1 执行机构故障Table 1 Actuator failures
为充分验证所提方法的容错性能,将本文方法与文献[15]中的基于干扰观测器的有限时间容错控制方法(即对比方法1)、基于文献[22]的预设性能反步容错控制方法(即对比方法2)进行对比仿真。对比方法1 的干扰观测器、滑模面s和控制器uc分别如式(65)~式(67)所示。
对比方法2 的性能函数及其参数设置与本文方法保持一致。其干扰观测器、虚拟控制律e2d、一阶滤波器及控制器uc分别如式(68)~式(71)所示。
本文方法与对比方法1、对比方法2 的相关参数选取分别如表2~表4 所示。

表2 本文方法的参数Table 2 Parameters for method of this article

表3 对比方法1 的参数Table 3 Parameters of Method 1
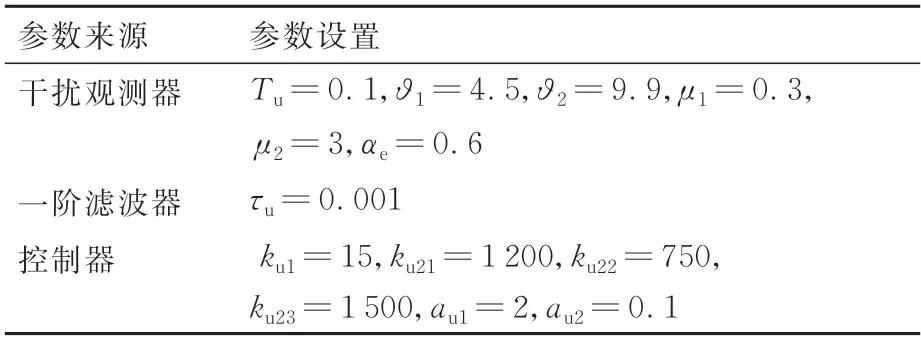
表4 对比方法2 的参数Table 4 Parameters of Method 2
图5~图7 给出了气流角跟踪曲线。由图中可知,执行机构未发生故障时,3 种控制方法均能在1 s 左右实现对气流角指令的跟踪;由于容错控制器的作用,执行机构在3 s 时发生的偏置故障对侧滑角有较小的影响,对攻角与倾侧角无明显影响;执行机构在10 s 发生增益故障时,对比方法1 的气流角明显偏离气流角指令,经过3 s 左右的调节,对比方法1 重新跟踪上了气流角指令,而本文方法与对比方法2 的气流角未明显偏离气流角指令,克服了执行机构故障对系统的影响。

图5 攻角跟踪曲线Fig.5 Angle of attack tracking curves

图6 侧滑角跟踪曲线Fig.6 Sideslip angle tracking curves

图7 倾侧角跟踪曲线Fig.7 Bank angle tracking curves
图8~图10 给出了气流角跟踪误差曲线。由图中可知,执行机构未发生故障时,3 种方法的气流角跟踪误差均能快速收敛至0°附近;执行机构在3 s 发生偏置故障时,在容错控制器的作用下,3 种方法的气流角跟踪误差均变化不大;执行机构在10 s 发生增益故障时,对比方法1 的气流角跟踪误差发生了较大的突变,3 s 后重新收敛至0°附近,而本文方法与对比方法2 的气流角跟踪误差始终处于预设性能边界之内,且本文方法的攻角、侧滑角及倾侧角的稳态误差均为0.002°,对比方法1 的攻角、侧滑角及倾侧角的稳态误差分别为0.006°、0.003°和0.007°,对比方法2 的攻角、侧滑角及倾侧角的稳态误差分别为0.01°、0.004°和0.01°。

图8 攻角跟踪误差曲线Fig.8 Tracking error curves of angle of attack

图9 侧滑角跟踪误差曲线Fig.9 Tracking error curves of sideslip angle

图10 倾侧角跟踪误差曲线Fig.10 Tracking error curves of bank angle
图11~图14 给出了舵偏角变化曲线。由图中可知,执行机构未发生故障时,3 种控制方法的舵偏角响应较为平稳,无抖振现象;由于容错控制器的作用,执行机构3 s 时发生的偏置故障对舵偏角影响较小;执行机构10 s 发生增益故障时,3 种方法的舵偏角均产生了较大的响应来补偿控制效率损失,本文方法与对比方法2 的舵偏角变化曲线在发生增益故障后0.05 s 内趋于平缓,而对比方法1 的舵偏角变化曲线在发生增益故障后2 s 左右才趋于平缓。

图11 1 号舵偏角曲线Fig.11 Deflection angle curves of Rudder 1

图12 2 号舵偏角曲线Fig.12 Deflection angle curves of Rudder 2
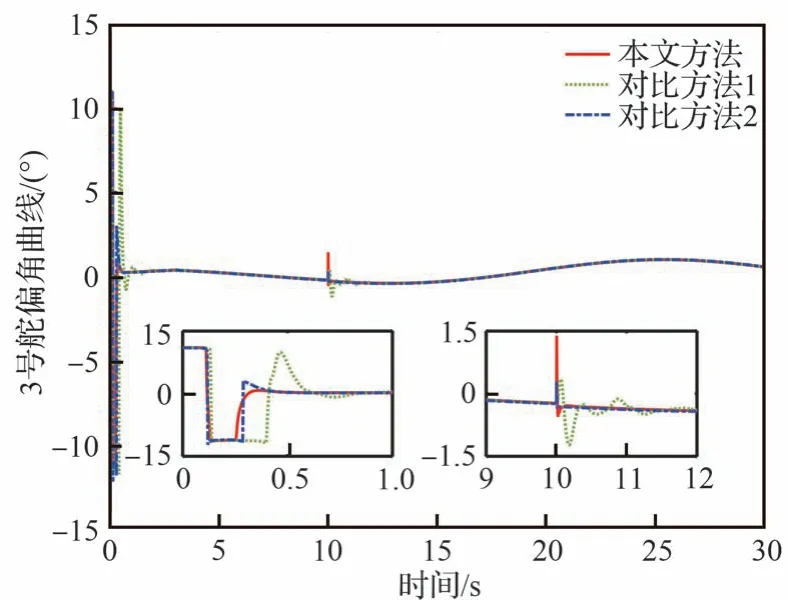
图13 3 号舵偏角曲线Fig.13 Deflection angle curves of Rudder 3

图14 4 号舵偏角曲线Fig.14 Deflection angle curves of Rudder 4
图15~图17 给出三通道复合干扰的估计值变化曲线,由图中可知,执行机构未发生故障时,2 种方法的三通道复合干扰估计值变化较为平缓,执行机构在3 s 发生偏置故障时,复合干扰估计值变化较小,执行机构10 s 时发生的增益故障使复合干扰估计值发生了较大的突变,但在短暂调节后又重新趋于平缓,可用于控制器中实现对复合干扰的精确补偿。

图15 滚转通道复合干扰估计值曲线Fig.15 Curves of composite disturbance estimate of roll channel

图16 俯仰通道复合干扰估计值曲线Fig.16 Curves of composite disturbance estimate of pitch channel

图17 偏航通道复合干扰估计值曲线Fig.17 Curves of composite disturbance estimate of yaw channel
图18 给出了滑模干扰观测器的滑模变量变化曲线,可以看出,滑模变量一直处于预设的性能包络之内,且偏置故障与增益故障对其影响均不明显。


图18 干扰观测器滑模变量变化曲线Fig.18 Variation curves for sliding variable of disturbance observer
为进一步分析执行机构的能量消耗情况,定义能耗值为Ei=∫|δi|2dt。图19 给出了执行机构的能耗值直方图。由图19 可知,采用本文方法的系统执行机构能耗值较对比方法1及对比方法2均更小。
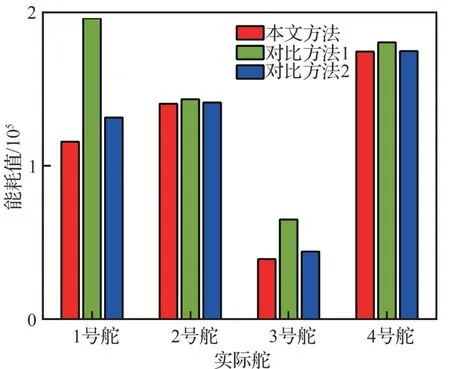
图19 执行机构能耗值直方图Fig.19 Histograms of actuator energy consumption
4 结论
本文针对高超声速飞行器姿态控制问题,提出了一种快速终端滑模保性能容错控制方法,有效克服了模型不确定、外部干扰和执行机构故障的不良影响。首先建立了高超声速飞行器面向容错控制的模型,并利用性能函数与误差转换实现对气流角跟踪误差瞬态和稳态性能的约束;其次设计了新型滑模干扰观测器,实现对由模型不确定、外部干扰和执行机构故障组成的复合干扰的准确估计与补偿;最后设计了非奇异快速终端滑模容错控制器,保证在复合干扰被准确估计之后,气流角跟踪误差在固定时间内收敛。仿真对比结果表明本文方法具有良好的容错能力。