水下机器人机载传感器信息采集与存储系统
2024-01-19龙达峰黄慰桐黄近秋
龙达峰,黄慰桐,黄近秋
(1.惠州学院 电子信息与电气工程学院;2.广东省电子功能材料与器件重点实验室,广东 惠州 516007)
占全球71%面积的海洋是生物资源、能源和金属资源的战略性开发基地。掌握海洋资源的开发和利用,争取战略制高点是一项极其重要的国家发展战略。水下机器人因具有自主性强、机动灵活、下潜上浮方便等优点,已成为海洋资源的勘察与开发、海洋救险与打捞、水中通信应用中重要装备[1-4]。就目前而言,水下导航系统主要有航位推算、惯性导航、地磁导航、声学导航系统(长基LBL、短基线SBL 和超短基线USBL)、多普勒测速导航(DVL)、海洋重力仪、INS/GPS 及浮标组合导航等[5-10]。随着对海洋资源的高效勘探和开发的迫切需求,对AUV、水下机器人等各类无人系统的自主运行和自主管理能力提出了更高的要求。由于水下恶劣的应用环境,水下机器人机载导航传感器信息的准确获取是实现其高精度导航定位的前提条件,而传统水下机器人导航系统通常基于MCU、DSP 等微处理器作为控制器进行信息采集硬件系统设计,其移植应用于智能化更高的水下智能机器人时存在一定困难,很难满足对自主导航和自主管理能力更高要求的导航测试应用场合。国内外研究者积极探索利用低成本惯性导航、地磁、声学导航和重力场导航构建水下组合导航系统的解决方案[11-14],这也是民用领域水下机器人智能化发展趋势。针对上述需求,本文基于FPGA设计实现水下机器人机载传感器信息采集与存储系统为构建水下组合导航系统的解决方案,以满足水下智能机器人自主导航系统的低成本存储测试要求。
1 系统硬件总体方案
如前所述,利用惯性导航、地磁和声学导航等构建水下机器人自主导航系统的解决方案。因此,本系统的机载传感器信息采集与存储测试硬件方案如图1。
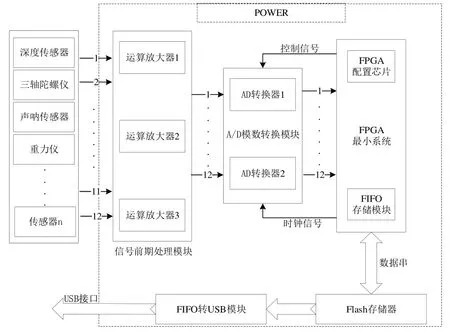
图1 测量系统硬件方案
该系统主要由机载导航传感器信号前期处理模块、A/D 转换模块、FPGA 控制模块、Flash 存储模块、USB 数据读取模块和电源模块等6 部分组成。其中,信号调理模块主要完成机载传感器输出信号放大、滤波等信号调理;ADC 转换模块选取ADS8365,在FPGA控制下将传感器模拟输出信号转换成数字信号;存储模块完成采集数据实时存储;机载导航计算机或上位机通过USB数据读取模块与本系统进行通信。
2 系统硬件设计
2.1 信号调理模块
选取OPA4340放大器进行调理电路设计,如图2。其中,IN1-IN4 和OUT1-OUT4 分别为4 路信号输入和输出端,各路信号相互独立,采用单电源+5 V供电。
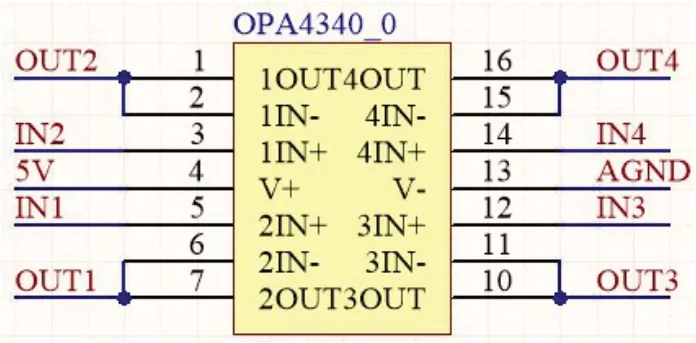
图2 信号调理电路
2.2 AD转换模块
采用2片ADS8365模数转换器设计12通道信号采集,ADC 采集电路如图3。图中OUT1-OUT6 为6 路机载导航传感器模拟输出端,每一路信号经由电容滤波后接入ADS8365 输入端CHA0-CHC1;D0-D15 为AD转换后 16 位采集数据输出;通过控制进行6 个通道选通控制;ADS8365模拟电源AVDD接5 V,ADS8365采用3.3 V供电。
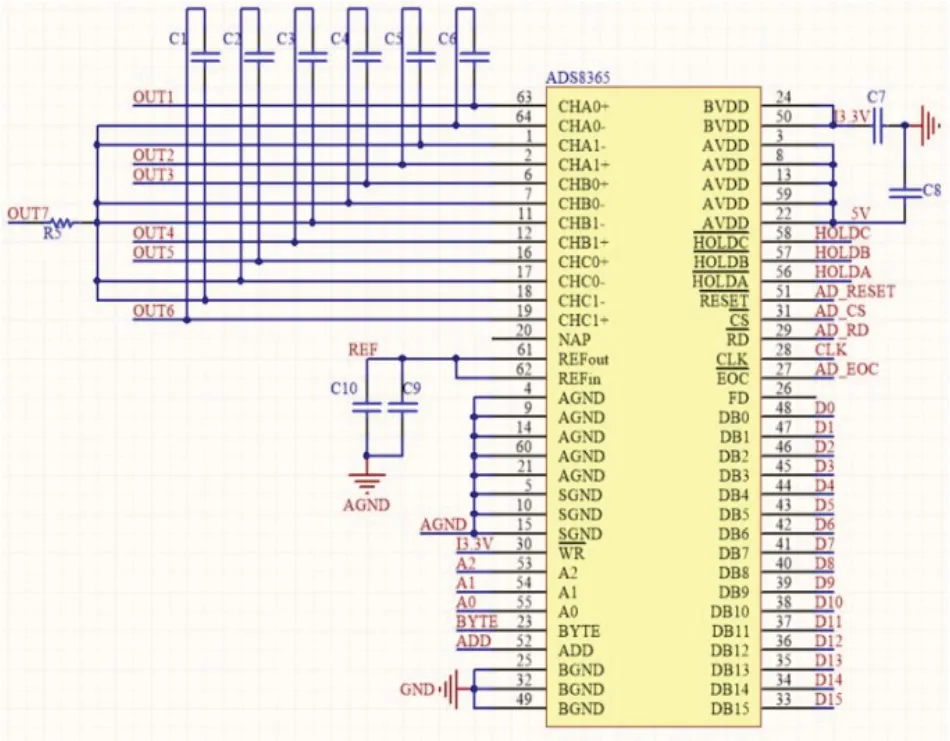
图3 ADC采集模块电路
选取Flash芯片进行存储模块设计,存储电路如图4。Flash芯片3.3 V供电,SD0-SD7为数据存储与读取端口,在FPGA控制逻辑下完成Flash采集数据擦除、读和写等。
考虑到Flash 存储单元有可能存在坏块,需要对Flash进行无效块的检测,并建立无效块信息表,然后再对Flash进行读写操作[9-10]。坏块检测流程图如图5。
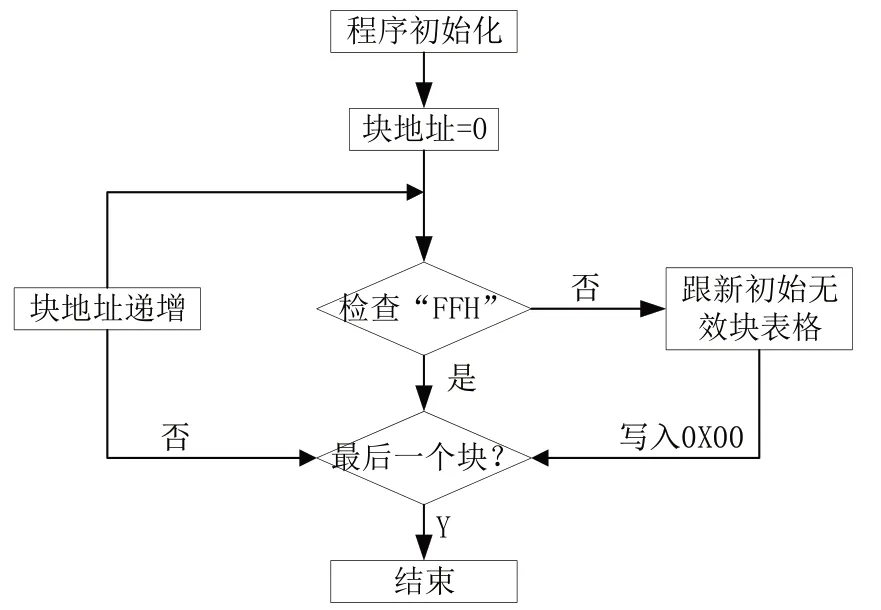
图5 坏块检测流程图
2.3 电源模块
选取7.4 V的锂电池作为供电电源,再通过稳压电源芯片LM2940 和MAX8882 将7.4 V 转换成5.0、3.3 和2.5 V 3 种不同电压输出,为系统各功能模块提供工作电压。如图6电源转换电路图所示。

图6 电源转换电路
2.4 FPGA控制模块
FPGA控制模块主要完成了整个系统的数据采集、存储和通信等,FPGA控制电路如图7所示。
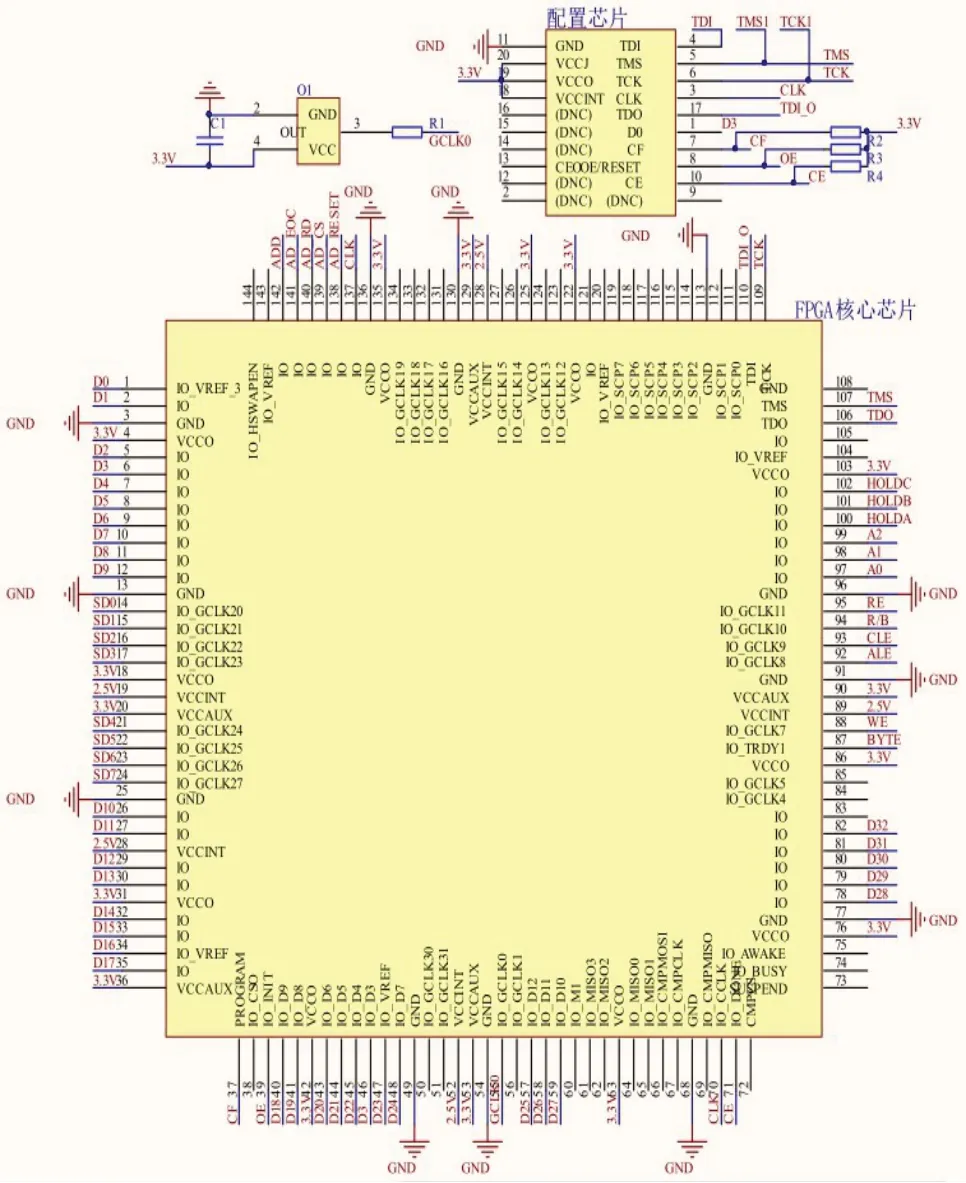
图7 FPGA控制电路
3 实验验证
3.1 测试条件
系统测试验证实验如图8,利用信号源模拟水下移动机器人不同运动状态下的三轴陀螺仪、三轴加速计、三轴地磁传感器以及水深传感器实际测量输出,各模拟传感器输出设置如表1,通过设置不同信号类型、幅值,以及不同频率的测量输出来验证系统的可靠性。
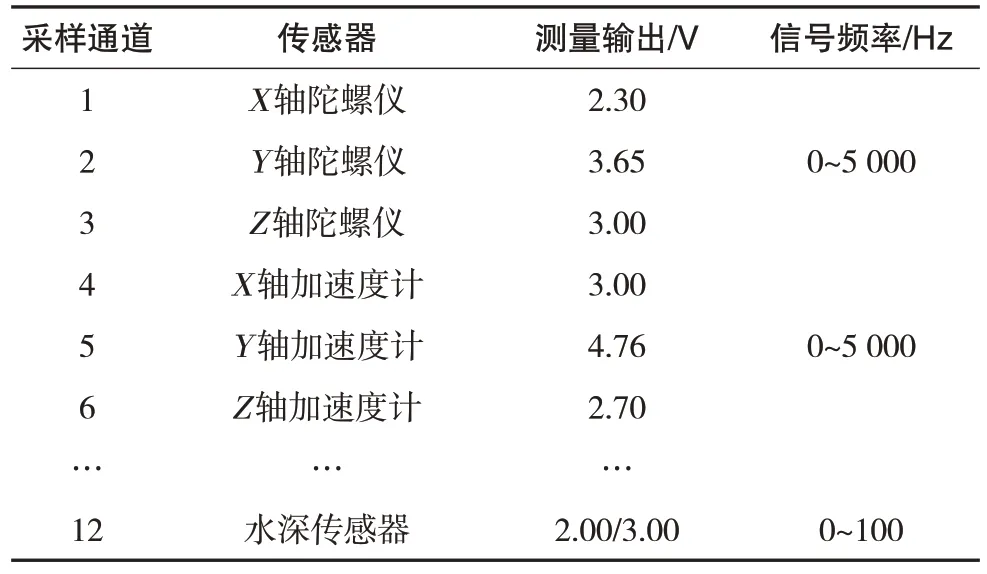
表1 传感器输出设置
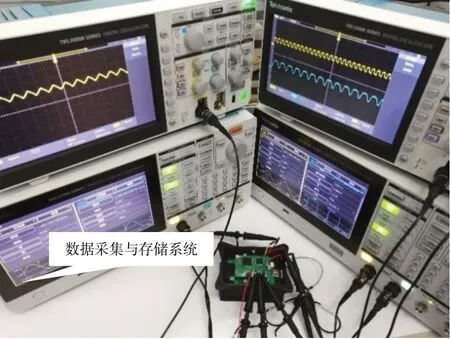
图8 系统测试实验
3.2 数据验证与分析
系统采集完成后,上位机读取Flash存储数据并进行数据分离。未分离的数据格式如表2,其中CDCD表示为数据帧头,第3~5位为数据帧计次数位,第6~23位为有效数据位。
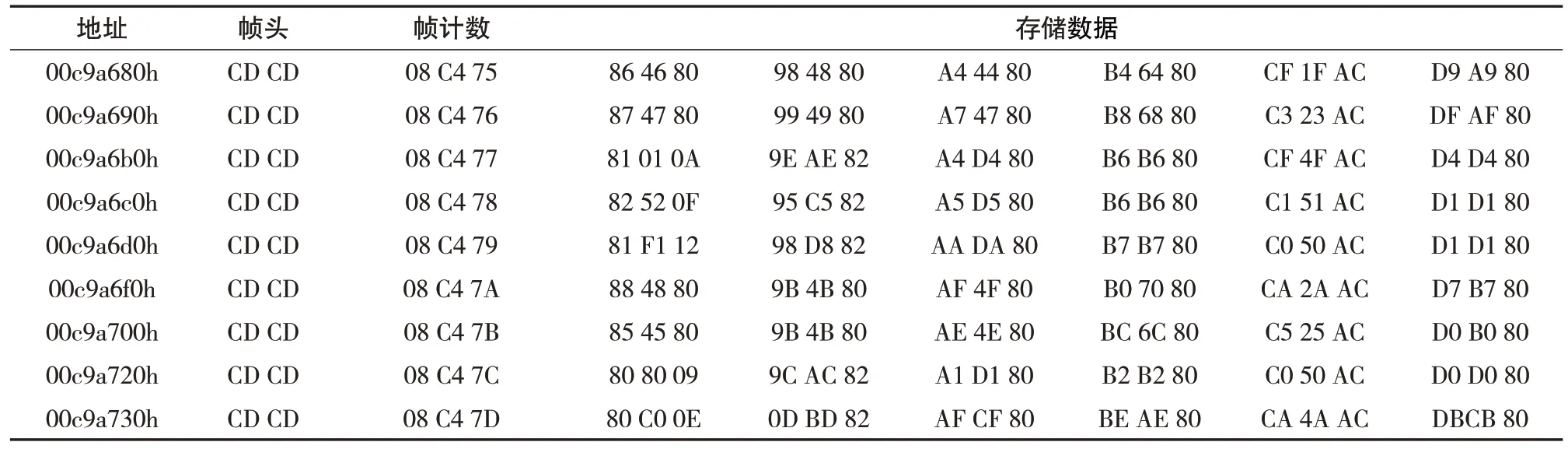
表2 未分离原始数据格式
各通道数据分离后,利用Matlab 绘制采集所得传感器测量输出曲线如图9-11。其中图9为通道1~3采集所得三轴陀螺仪测量输出曲线(8.00~8.01 S 局部放大图),各轴输出信号幅值分别为2.3、3.7 和3.1 V,信号频率均为2 000 Hz,与信号源模拟传感器输出相同。图10 为通道4~6 加速度计测量输出曲线(20.0~20.1 S局部放大图),三轴加速度计输出幅值分别为3.0、4.8和2.7 V,信号频率均为500 Hz,图11为通道12水深传感器测量输出曲线。结果表明,系统能够实时准确地完成各通道传感器信号的采集与存储。
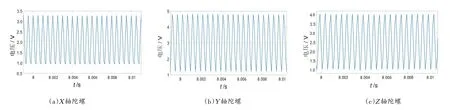
图9 三轴陀螺仪测量输出

图10 三轴加速度测量输出
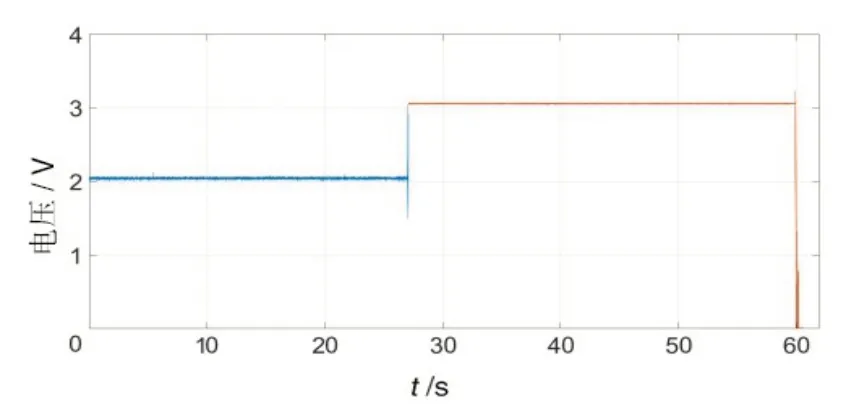
图11 水深传感器测量输出
4 结论
本文提出了一种基于FPGA水下机器人机载多传感器信息采集与存储系统方案,并对系统进行了实验测试验证,结果表明该系统能够实时准确完成12通道信号的同步采集与存储,该方案可为水下机器人自主导航系统的低成本存储测试提供参考。
