机载投掷式角反射器阵列电磁散射特性分析
2024-01-19于群张义赵非玉过凯刘圆圆班驳
于群 张义 赵非玉 过凯 刘圆圆 班驳
(中国电子科技集团公司光电研究院, 天津 300308)
0 引 言
角反射器是一种用于形成雷达假目标的无源干扰装置,一般由三面相互垂直的金属平板或带有金属镀层的非金属平板组成.根据光学镜面反射原理,入射的电磁波会产生三次反射,最终沿入射反方向返回,从而产生较高的雷达散射截面(radar cross section, RCS),能够模拟比自身尺寸大得多的目标雷达散射特性,对雷达制导武器产生假目标干扰欺骗作用[1].角反射器自二战时期一直发展至今,已发展出了多种结构形式,有摆放式及充气式角反射器等,如英国橡皮鸭舷外充气式角反射器等[2],主要应用于地面及海面战场,空中应用较少[3-4].
角反射器具有结构简单、成本较低、RCS 大、频段连续覆盖无空白、干扰持久等优点,因此在极化、频宽、起伏等雷达特性方面与真实目标相似度高[5].并且通过不同结构形式的角反射器组合以及阵列排布,能够实现对角反射器阵列全角域雷达散射特性的调控,从而达到对特定目标雷达散射特性进行模拟的目的[6].本文给出了一种新型角反射器阵列的结构设计,并通过仿真分析及模型样件测试验证了该角反射器阵列的雷达散射特性,可用于隐身飞机平台投放并伴随飞行,产生无源假目标干扰效果,对于防护隐身飞机平台具有一定的应用价值.
1 角反射器及飞机RCS 特性分析
1.1 角反射器RCS 特性分析
角反射器主要为三面角反射器,按照各面的结构形式划分包括三角形角反射器、方形角反射器以及圆形角反射器等,如图1 所示.
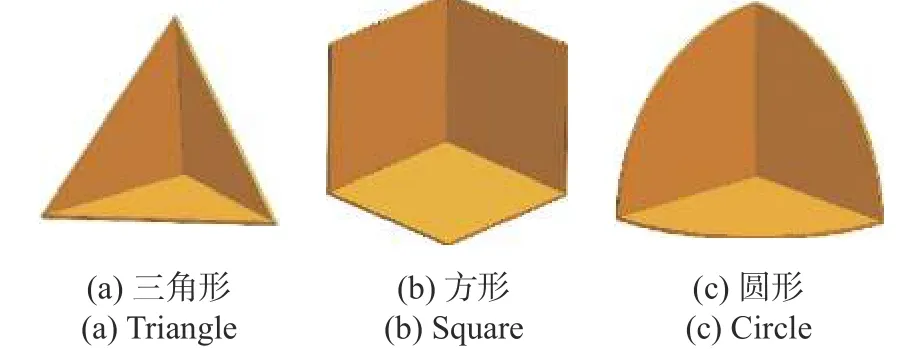
图1 三种主要角反射器结构Fig.1 Three main corner reflector structures
角反射器雷达散射特性的计算以惠更斯-费涅尔(Huygengs-Fresnel)原理为基础[7],采用几何光学法求得RCS 为
式中:AT为与电磁波垂直的投影面积; λ为波长.计算后得到三种角反射器的最大RCS 为:
考虑三种角反射器全角域RCS 特性(如表1 所示),可以看出:三角形角反射器的RCS 虽然较小,但是其角度特性最好;方形角反射器虽然RCS 最大,但是其角度特性较差;圆形角反射器RCS 及角度特性较为均衡.因此,通过将三种角反射器进行组合设计,可以得到不同RCS 特性的角反射器阵列,以模拟特定目标[8].
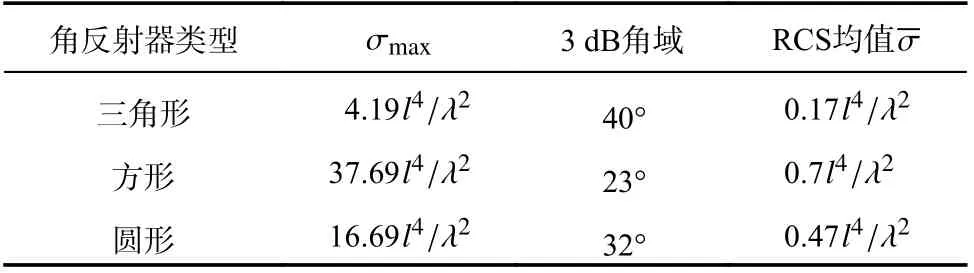
表1 三种角反射器RCS 特性对比Tab.1 Comparison of radar scattering characteristics of 3 corner reflectors
1.2 典型飞机目标RCS 特性分析
飞机平台作为空中主要作战平台,其隐身性能是一个非常重要的性能指标,直接影响飞机战场生存能力,在飞机设计之初就会重点考虑[9].RCS 特性是隐身性能的重要指标之一,主要受飞机结构及蒙皮材料的影响,当前先进的飞机平台都进行了雷达隐身设计.飞机平台作为复杂目标,对电磁波的作用主要包含镜面反射、边缘绕射、尖顶绕射、爬行波绕射、行波绕射和非细长体因电磁突变引起的绕射等,如图2 所示.而对于无隐身措施的常规飞机,其散射场包括反射和绕射场,主要是镜面反射和边缘绕射起作用[10].受飞机结构决定,其各方向雷达散射特性差异较大.当前隐身飞机均采用了机身气动外形隐身、机翼气动外形隐身、进气道隐身以及表面缝隙隐身等多种措施,使得镜面反射及边缘绕射基本消失,有效降低了飞机平台全角域的RCS.国内有学者对典型隐身飞机平台F-35 及B-2 进行了三维数字建模并通过仿真分析了其在10 GHz 频率的RCS 特性,结果如图3 所示[11].可以看出,隐身飞机整体的RCS 特性较低,其中F-35 飞机前向RCS 最小,约为0.1 m2;后向RCS稍大,约为0 dB(1 m2);侧向受机翼及其他结构影响RCS 相对最大,达到13 ~15 dB(20~30 m2).B-2 轰炸机除前侧向RCS 较大外,基本在0 dB(1 m2)以下.

图2 隐身飞机电磁波作用原理示意图Fig.2 Schematic of electromagnetic wave action principle of stealth aircraft
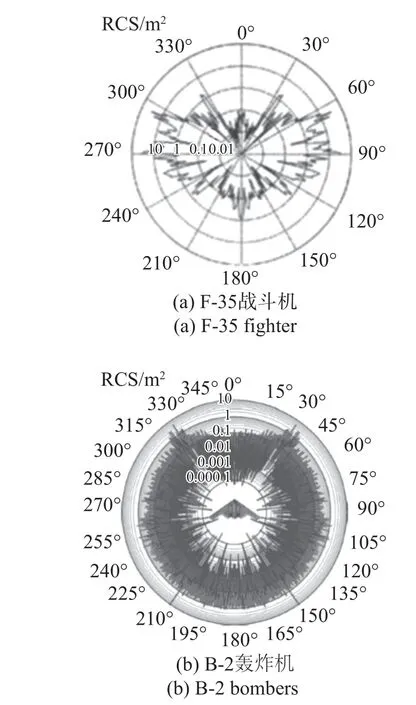
图3 典型隐身飞机平台模型RCS 特性[11]Fig.3 RCS characteristic curve of typical stealth aircraft platform model[11]
因此,可以利用三种角反射器组合设计一种角反射器阵列[12],对飞机平台尤其是隐身飞机平台的RCS 特性进行模拟,从而应用于飞机平台自卫防护.
2 角反射器阵列设计及RCS 分析
2.1 角反射器阵列设计
角反射器阵列结构组合理念是基于现有方形、圆形及三角形角反射器结构形式,并且阵列具备相对较高的侧向RCS 和较好的飞行气动特性,能够具备与隐身飞机相似的雷达散射特性.角反射器整体基于气动特性较好的圆柱形结构进行多级设计,通过不同结构形式的角反射器进行多级轴向叠加构成,达到对角反射器阵列侧向RCS 增强的效果.
角反射器阵列结构如图4 所示,整体设计为四级结构,前端第一级由四个圆形角反射器组成,根据角反射器RCS 理论公式计算得到0.1 m2对应边长为50 mm;第二级由四个方形角反射器组成;第三级为八个三角形角反射器倾斜一定角度相互连接组成;尾部第四级同样由四个方形角反射器组成.参考当前较为热点的如“亮云”投掷式有源诱饵结构特点[13],在第四级外部连接有折叠尾翼结构,贮存状态时可折叠收纳,在投放使用后自动展开,从而实现角反射器的快速调姿稳定平飞并保持一定时间的惯性飞行,如图5 所示.后三级角反射器周向半径均与第一级保持一致以降低空气阻力,轴向长度每级设定为100 mm,从而增加整体长度并提高飞行稳定性.

图4 角反射器阵列结构示意图Fig.4 Corner reflector array structure

图5 “亮云”投掷式有源诱饵结构示意图Fig.5 The structure of “BriteCloud” active cast decoy
1)第一级角反射器是整个角反射器阵列在前向RCS 的主要贡献单元,且是主要的空气阻力受力部分,需要具备一定的RCS 及角度特性,且结构外形能够具备减阻效果.因此选择四个圆形角反射器组成第一级,以满足RCS 特性及减阻需求.
2)第二级角反射器需要增强阵列在侧向的RCS 特性,因此选择RCS 最大的四个方形角反射器来组成第二级,并通过圆形平板与上下级进行连接.
3)第三级角反射器考虑对整个阵列在前侧向及后侧向的RCS 特性进行一定的补偿,考虑隐身飞机平台前后侧向的RCS 并不突出,因此选择角度特性最好、方便连接的八个三角形角反射器.其中四个向前侧方倾斜,四个向后侧方倾斜,在公共边进行连接,组成第三级,并通过圆形平板与上下级进行连接.
4)第四级角反射器为整个阵列在后向RCS 的主要贡献单元,选择四个方形角反射器,并且在侧边连接有四个折叠尾翼,来帮助阵列在高速飞行状态下保持平飞,并提高飞行稳定性.
对角反射器阵列的第二、三、四级进行轴向加长,可以进一步提高角反射器阵列在侧向的RCS 特性,并且通过多个相同的圆形平板进行上下级连接,使得阵列整体更加符合流线型设计,以减小飞行阻力.
2.2 基于CST 的角反射器阵列RCS 仿真分析
对四级角反射器阵列模型通过CST 电磁仿真软件进行分析[14-15],从第一级开始逐级叠加,从而分析每一级角反射器对于整个阵列RCS 特性的贡献.
1)一级角反射器阵列RCS 特性分析
对第一级角反射器建模并进行仿真分析,角反射器边长为50 mm,入射电磁波设定为远场平面波,频率选取为10 GHz,垂直极化方式,得到其前向RCS 特性曲线,结果如图6 及图7 所示.可以看出,在前向较宽的角度范围内均能够具备一定的RCS 特性,在0°附近的RCS 最大值约为−0.97 dB(0.8 m2).
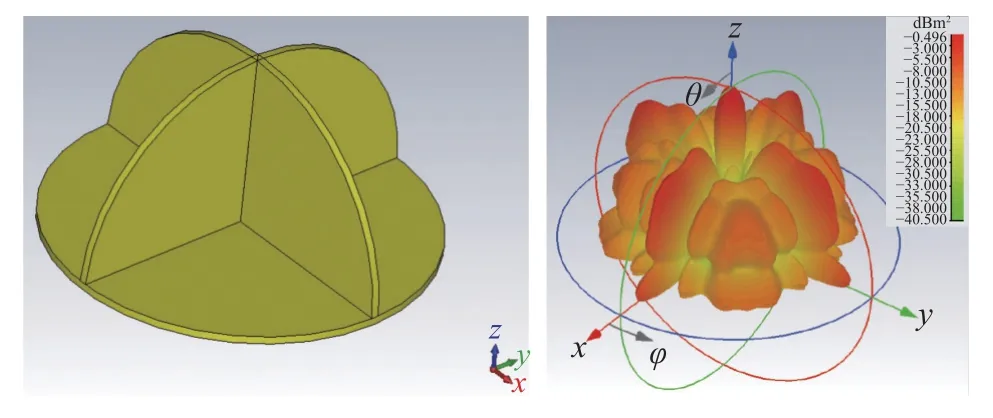
图6 一级角反射器阵列仿真结果Fig.6 Simulation results of one stage corner reflector array

图7 一级角反射器阵列周向RCS 特性Fig.7 Circumferential RCS characteristic curve of one stage corner reflector array
2)二级角反射器阵列RCS 特性分析
对第一级与第二级角反射器组成的阵列建模并进行仿真分析,第二级角反射器高度设定为100 mm,并选取φ=90°得到其周向RCS 特性曲线,结果如图8 及图9 所示.可以看出,由于二级角反射器阵列在第一级圆形四象限角反射器的基础上增加了第二级圆底方形角反射器,阵列整体在侧向的RCS 有了明显提高,在90°附近RCS 最大值约为0 dB(1 m2).

图8 二级角反射器阵列仿真结果Fig.8 Simulation results of two stage corner reflection array
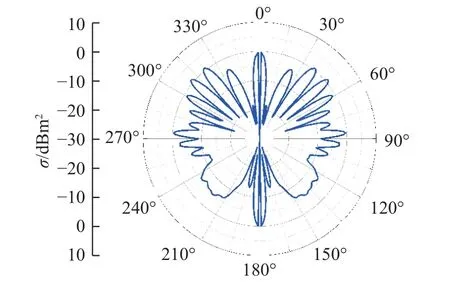
图9 二级角反射器阵列周向RCS 特性Fig.9 Circumferential RCS characteristic curve of two stage corner reflector array
3)三级角反射器阵列RCS 特性分析对前三级角反射器阵列建模并进行仿真分析,第三级角反射器高度设定为100 mm,环绕对称共计八个三角形角反射器彼此连接,并选取φ=90°得到其周向RCS 特性曲线,结果如图10 及图11 所示.可以看出,三角形角反射器的角度特性较好,阵列整体的RCS 有了一定提高,侧向及前后侧向的RCS 更加均匀.在0°附近RCS 最大值约为−0.97 dB(0.8 m2),在90°附近约为0.79 dB(1.2 m2).
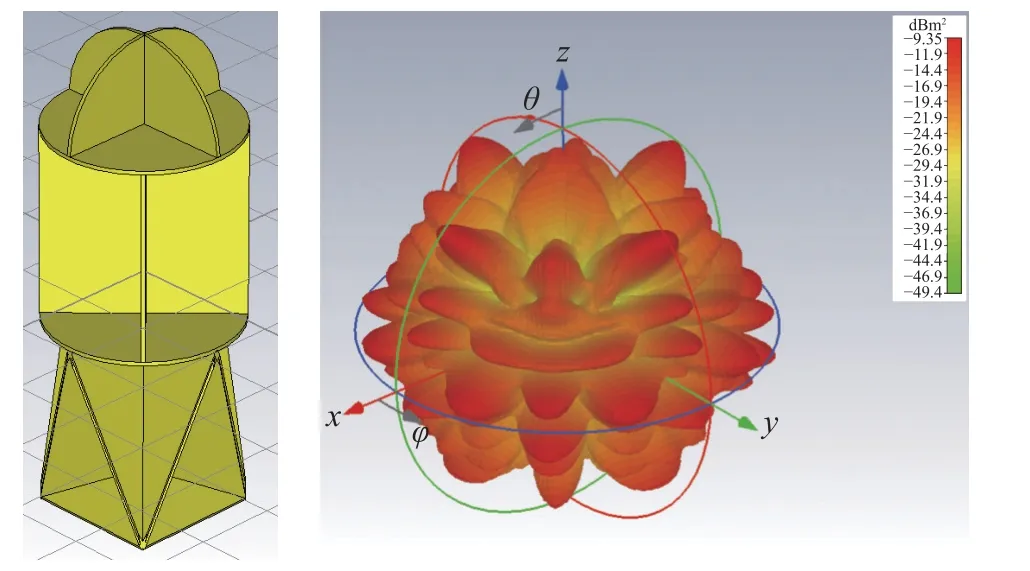
图10 三级角反射器阵列仿真结果Fig.10 Simulation results of three stage corner reflection array
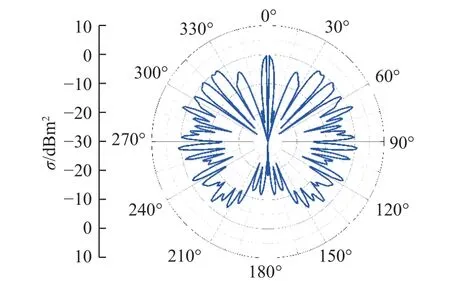
图11 三级角反射器阵列周向RCS 特性Fig.11 Circumferential RCS characteristic curve of three stage corner reflector
4)四级角反射器阵列RCS 特性分析
四级角反射器阵列在三级阵列的基础上增加了第四级圆底方形角反射器以及折叠尾翼结构.对四级角反射器阵列建模并进行仿真分析,高度同样为100 mm,选取φ=90°得到其周向RCS 特性曲线,结果如图12 及图13 所示.可以看出,其中折叠尾翼对阵列RCS 特性影响不明显,且第四级角反射器进一步增强了阵列在侧向的RCS,在90°附近RCS 最大值约为7.08 dB(5.1 m2).

图12 四级角反射器阵列仿真结果Fig.12 Simulation results of four stage corner reflection array

图13 四级角反射器阵列周向RCS 特性Fig.13 Circumferential RCS characteristic curve of four stage corner reflector
3 角反射器阵列RCS 测试验证
3.1 阵列样件远场RCS 测试
依据四级角反射器阵列结构,采用不锈钢材料制作等比模型样件,因折叠尾翼对阵列RCS 的影响较小,对模型样件进行简化,不含尾翼部分.为保证焊接强度,样件采用不锈钢材质进行制作,制作完成整体质量约1 060 g.采用微波暗室远场测试系统对角反射器阵列的RCS 特性进行测试.将模型样件水平放在样品台上,样件尖端正对天线方向,夹角为0°,选取频率10 GHz,0°~180°周向角范围,垂直极化方式进行测试并记录数据,如图14 所示.通过等比模型样件的微波暗室远场测试,得到了四级角反射器阵列周向的RCS 特性,如图15 所示.可以看出,与仿真结果一致性程度较好,验证了仿真建模分析的准确性.
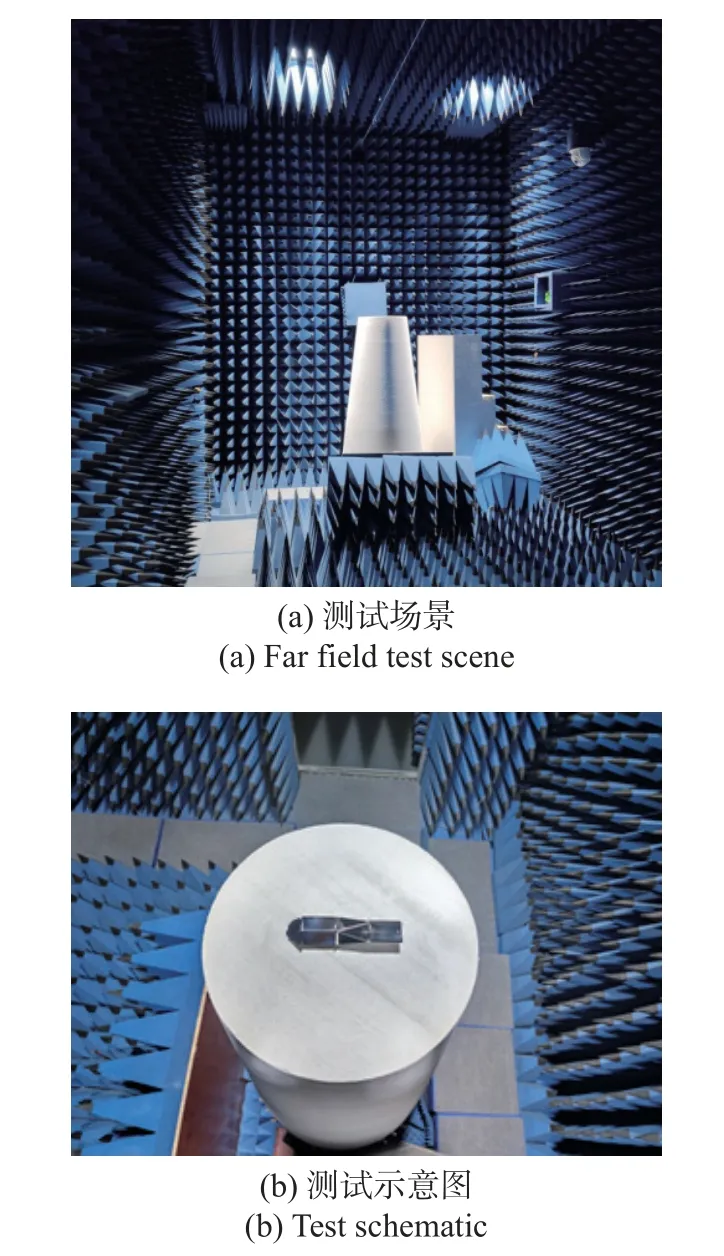
图14 角反射器阵列模型样件RCS 远场测试Fig.14 Far field RCS test of corner reflector array model sample
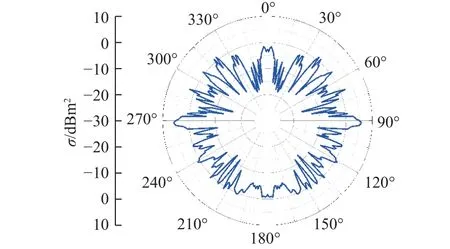
图15 角反射器阵列模型样件周向RCS 测试数据Fig.15 Circumferential RCS test data of corner reflector array model sample
3.2 角反射器阵列模拟目标RCS 特性效果分析
前文已经完成了角反射器阵列的数字建模,并基于CST 软件完成了RCS 特性仿真分析,同时制作了等比模型样件进行了微波暗室远场测试,根据仿真及测试结果,与典型隐身飞机目标送RCS 特性进行对比,结果如表2 所示.
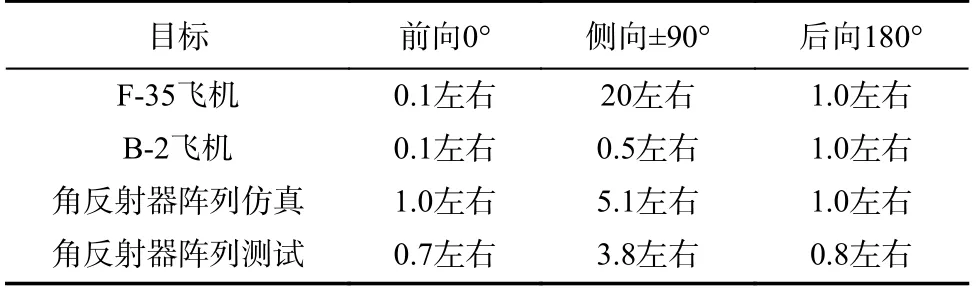
表2 隐身飞机与角反射器阵列RCS 特性对比Tab.2 Comparison table of RCS characteristics between aircraft and corner reflector arraysm2
通过对比可知,本文设计的四级角反射器阵列结构的RCS 特性与隐身飞机目标特性相似,均具备前后向RCS 较小、侧向RCS 较大的特性.但因F-35 飞机侧向RCS 较高,在使用时可通过增加叠加级数,并参考箔条干扰弹使用方法进行多发投放,对角反射器形成的RCS 以及假目标数量进行调整,同时配合飞机机动规避动作,以提高干扰效果.
4 结 论
本文首先对单个角反射器与隐身飞机目标的RCS 特性进行了分析,为通过角反射器阵列组合实现对隐身飞机目标RCS 特性的近似,设计了一种由四级角反射器单元组成的角反射器阵列.并针对其结构进行了仿真建模与RCS 特性分析[15-16],同时制作等比模型样件进行了微波暗室远场测试,验证了仿真分析的准确性并分析了与典型隐身飞机目标RCS 特性的近似效果.
当前大量装备的脉冲多普勒(pulse Doppler, PD)雷达制导导弹导引头主要通过相对径向速度和目标雷达散射特性进行目标识别和跟踪,该角反射器阵列结构通过投放能够在空中保持一定时间的惯性飞行,从而形成与飞机近似的运动及RCS 特性,以干扰诱骗雷达制导武器,对于隐身飞机平台末端自卫防护具有较高实用价值和应用前景.