新概念装备军事需求分析方法与应用
2024-01-16陈有兴巫吉川徐明兴沈雁鸣
陈有兴,何 磊*,巫吉川,徐明兴,沈雁鸣
(1.中国空气动力研究与发展中心计算空气动力研究所,四川 绵阳 621000;2.解放军78092 部队,成都 610000)
0 引言
武器装备军事需求论证是装备发展项目建设活动的起点,也是项目实施的基本依据[1]。论证过程中,论证人员分析发展新型装备的必要性,科学地提出装备主要的性能指标的过程被称为武器装备论证需求分析[2]。需求分析结果的科学性和合理性对武器装备研制的成败具有决定性意义[3]。
新概念武器的潜在作战效能和应用前景已引起了各军事大国的广泛重视。近几年,各国加快推进新概念装备研发,谋求掌握新的战略竞争优势。以美国为例,美军在高超声速武器、高能激光武器、下一代战机(NGAD)、微波武器、粒子束武器等领域积极布局[4-7],多措并举推进新概念武器发展。
当前我军武器装备从跟踪测仿阶段逐渐进入自主创新发展阶段,新概念装备目标图像不明确、研制风险高、建设周期长,亟待提高基于需求分析的正向设计能力。因此,开展新概念装备军事需求分析方法研究对优化资源配置、降低研制风险、提高体系贡献率等意义重大。
国外针对武器装备需求开发的架构与方法已进行了大量研究,形成了适应多元复杂战略环境的装备能力需求和开发系统以及体系结构框架,见文献[8-15]。
国内还未将武器装备需求开发制度化,但通过积极借鉴美军JCIDS 需求开发过程和体系结构设计思想,对武器装备需求分析也开展了大量工作,构建了一系列需求分析框架与流程[16-21],并结合体系架构框架(DoDAF),给出了需求分析流程中的某些步骤的具体分析方法[19,22-23]。此外,伴随着工具软件、系统工程理论、基于模型的系统工程(MBSE)方法等的成熟完善,基于模型的体系能力需求分析也在广泛应用[24-25],为开展装备需求分析的数字化建模提供了参考。这些工作推动武器装备需求分析模型化、规范化,但都未贯通整个需求分析流程,对于装备需求生成的支撑力度还有所不足。
1 美军JCIDS 分析框架
美军为发展一体化作战能力,通过建立JCIDS,结合DoDAF 建模框架,以联合作战概念为指导,开发了一套军事需求分析框架[26],其主要流程如图1所示。分析框架的主要特点包括坚持基于能力的开发思想、构建自上而下的需求生成模式等[27],保证待发展装备符合联合作战需求,提高装备体系能力。
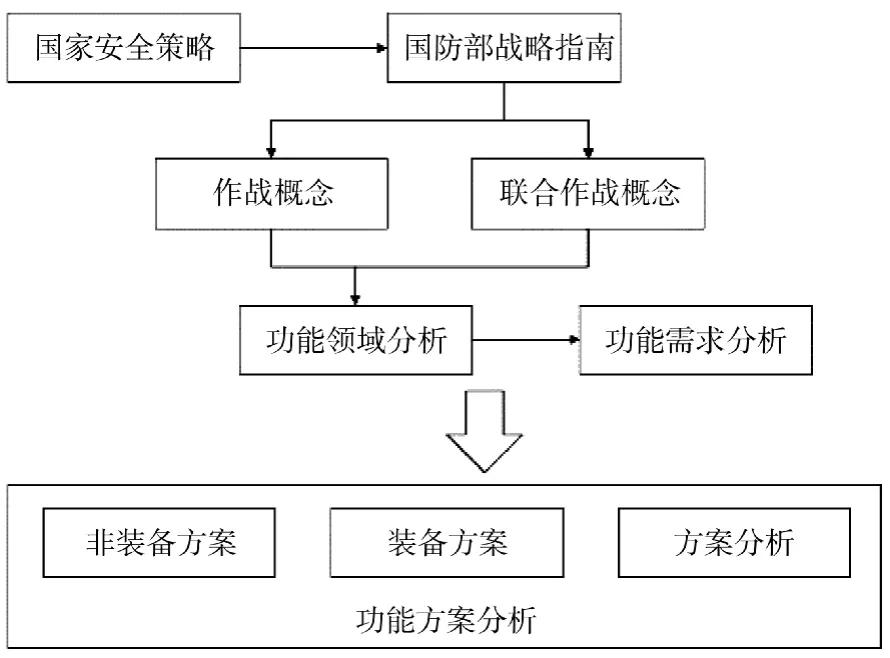
图1 JCIDS 主要流程Fig.1 Main process of JCIDS
JCIDS 需求分析在实际应用中,广泛应用面向对象、过程、控制、数据等分析方法,进行作战、能力、装备等层级的需求开发,形成包括装备方案、非装备方案、政策因素等提升能力发展的解决方案。借鉴JCIDS 需求分析框架,对探索国内武器装备需求开发机制,提高装备正向设计能力具有重要作用。
2 新概念装备需求分析框架
对于装备体系需求开发,其能力需求分析着眼于体系能力,体系能力由功能支撑,若干功能聚合为一套装备,由装备实现,并且装备体系需求分析主要确定武器装备体系的规模和数量。新概念装备需求开发与装备体系需求开发的区别在于:作为单一装备,新概念装备能力需求为装备能力需求而非体系能力需求,继而无需分析装备体系的作战功能需求,并且新概念装备需求不关注武器装备体系的规模和数量,而着眼于装备的性能需求。
基于体系结构框架思想,积极借鉴已有成果,结合新概念装备的具体特点,设计了如下页图2 所示的新概念装备需求分析框架,包括五大流程,15个模型。模型的建模方法则参考了DoDAF2.0,涉及有作战视角(OV),能力视角(CV),系统视角(SV)。图2 中各个模型下方的代号即为对应的DoDAF2.0的视角与模型。建模语言参考统一建模语言UML(unified modeling language),可将结构、行为等可视化,便于就设计内容进行沟通,实际建模中,15 个模型可按需剪裁,不必完全覆盖。相比较美军JCIDS分析框架,新概念装备需求分析框架是在其基础上进行改进和细化,并将建模方法与分析流程强耦合,可操作性更强。
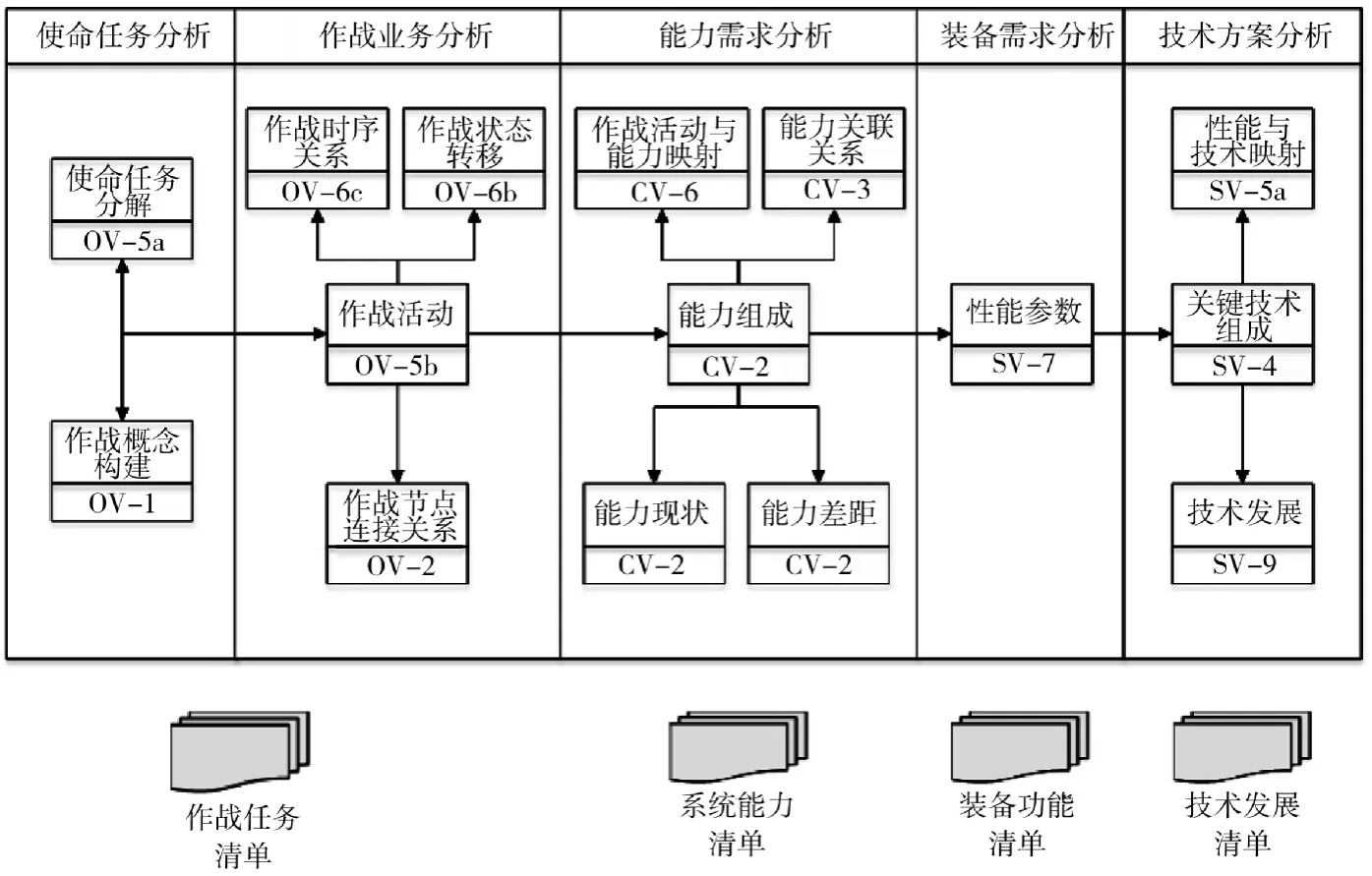
图2 新概念装备军事需求分析框架Fig. 2 Military requirement analysis framework of new concept equipment
3 无人跨介质飞行器需求分析
跨介质飞行器是可在空中飞行和水下潜航的新概念飞行器,它兼有飞行器的速度和潜航器的隐蔽性,可针对敌方防御体系弱点,综合利用空中和水中的突防手段进行突防,具有高效突防打击能力和多任务能力[28]。为推动需求分析框架的转化应用,以无人跨介质飞行器为例进行需求开发。作战背景与总体设想为:2035 年左右,红方与蓝方爆发小规模武装冲突,有河水流经冲突地区,河水平均深约30 m,最大水深40 m,可供小型舰艇游弋、水下设备活动。双方考虑经济可承受性以及避免事态升级,参战装备均为小型化装备,包括水面小型舰艇、小型无人机,小型防空炮等。
3.1 使命任务分析
3.1.1 使命任务分解
红方使命任务是特种作战、隐蔽突击蓝方前线后方高价值固定目标。该目标位置地处河边,距前线40 km,是蓝方指挥所和保障基地。使命任务模型通常需要对使命任务进行分解细化,得到细粒度的作战任务,但作为例子,红方的使命任务已经足够细化明确,无需继续分解。
3.1.2 作战概念构建
红方为达成使命任务,避开蓝方水面、陆上、空中力量,考虑充分利用水下通道对蓝方浅近纵深的高价值固定目标实行隐蔽突击,为此红方配备可水下机动、空中打击的新型武器无人跨介质飞行器,通过与先期投送的无人传感器配合,完成使命任务。
为此,设计了如图3 所示的无人跨介质飞行器作战概念。无人跨介质飞行器编队抵近边境后,从河流水下渗透至目标附近水域,途中可视情打击蓝方水面舰艇;到达目标附近水域后,停留待机,待收到作战指令后,无人跨介质飞行器编队跃出水面,一部兵力按照预先规划打击固定目标,一部兵力根据侦察情况自主打击活动目标;最后根据打击效果,自主实施补充打击。

图3 无人跨介质飞行器隐蔽突击作战概念Fig. 3 Covert assault operation concept of unmanned trans-media aircraft
3.2 作战业务分析
3.2.1 作战活动
根据作战概念,无人跨介质飞行器作战活动模型如下页图4 所示,采用UML 活动图来表述,主要的目的是陈述活动与活动之间的流程控制的转移。指控中心下达任务命令后,投送无人传感器组网构建全域侦察,飞行器于地面起飞后入水,入水后分别进行水下探测与水下潜行,发现水面舰艇则予以打击,待到达目标水域附近后待机,收到作战命令后,部分兵力按预先规划打击固定目标,一部分兵力自主打击活动目标,评估打击效果后返航。
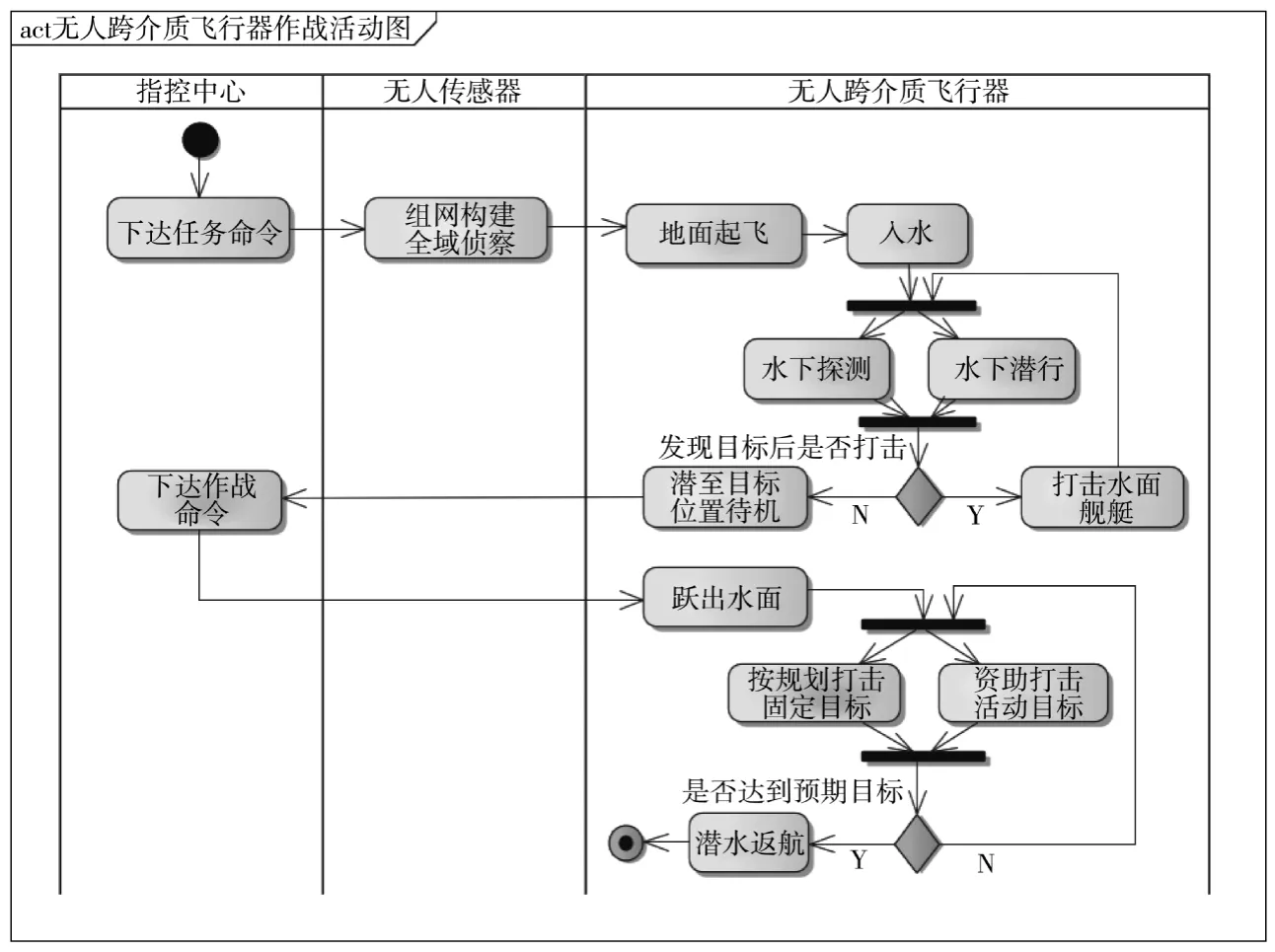
图4 无人跨介质飞行器作战活动Fig. 4 Operational activities of the unmanned trans-media aircraft
3.2.2 作战状态转移
作战状态转移模型如图5 所示,采用UML 状态机图表述。行动开始后,无人跨介质飞行器收到指令,由空中飞行状态转换为机动入水状态,入水完成后转化为下潜前进状态,在下潜前进过程中,如发现水面舰艇则视情发射鱼雷予以打击,潜行过程中,如果发现障碍,则机动规避,机动规避可能需要经历出入水的过程。下潜前进至目标附近后,飞行器转换为潜伏待机状态等待指令,待收到指令则转换为出水飞行,部分兵力按照预先规划发射导弹打击固定目标,部分兵力转换为自主侦察状态,如发现活动目标,则发射导弹打击;最后由飞行器判断是否达到预期目标,如是,则自主实施补充打击。

图5 无人跨介质飞行器作战状态转移Fig. 5 Operational state transition of the unmanned trans-media aircraft
3.2.3 作战时序
为更好地对业务流程进行梳理,除了需要构建状态转移模型,还需要作战时序模型来辅助校验,作战时序模型如下页图6 所示,采用UML 顺序图表述。首先由无人侦察传感器侦察固定目标的实时态势,并将目标位置等预警信息发送无人飞潜器,无人跨介质飞行器潜行过程中,对水面舰艇开展实时态势侦察,并视情予以打击。到达目标位置后,部分飞行器对固定目标进行打击,并进行毁伤效果评估,部分飞行器对活动目标进行实时态势侦察,开展打击后进行毁伤效果评估。对地面目标的打击可能需要补充打击。

图6 无人跨介质飞行器作战时序Fig. 6 Operational timing of the unmanned trans-media aircraft
3.3 能力需求分析
3.3.1 能力组成
能力组成模型如图7 所示,采用树形方法确定能力之间的层次分解关系。结合作战业务分析,无人跨介质飞行器作战能力应主要由三大能力组成,分别是机动能力、打击能力以及信息能力。其中限制性机动能力来源于状态转移模型中机动规避的状态需求;水下打击能力来源于作战活动模型中打击水面舰艇的活动需求;预警探测能力需要包括水下探测能力和空中探测能力,它们分别来源于打击水面舰艇和打击活动目标的任务要求。
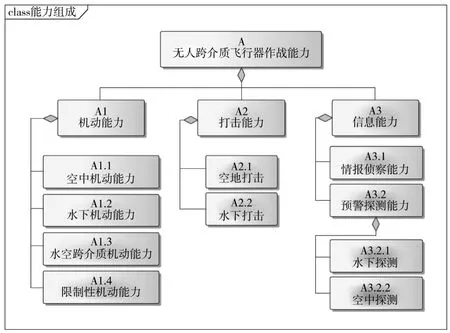
图7 无人跨介质飞行器作战能力组成Fig. 7 Operational capability composition of the unmanned trans-media aircraft
完成能力组成分解后,进一步对能力达到的指标或水平进行描述,下页表1 分别对机动能力、打击能力、信息能力进行了简要说明。例如,对于空中机动能力,为提升跨介质飞行器生存性,降低被发现概率,实现快速出入水机动,因此,要求其能够超低空飞行;对于水下机动能力,为充分利用湖泊水深,达到隐蔽潜行效果,要求其能够贴水底潜行,另外,为能等待作战时间窗口发起突击,要求其能够长时水下待机。

表1 无人跨介质飞行器作战能力描述Table 1 Operational capability description of the unmanned trans-media aircraft
3.3.2 活动与能力映射
作战活动与能力映射模型描述作战活动与支持其实现的装备能力之间的对应关系,如表2 所示。例如打击水面舰艇活动则需水下机动能力、水下打击能力、水下探测能力等支撑;按规划打击固定目标活动需空中机动能力、空地打击能力空中探测能力等支撑;自主打击活动目标需空中机动能力、空地打击能力、空中探测能力、毁伤评估能力等支撑。
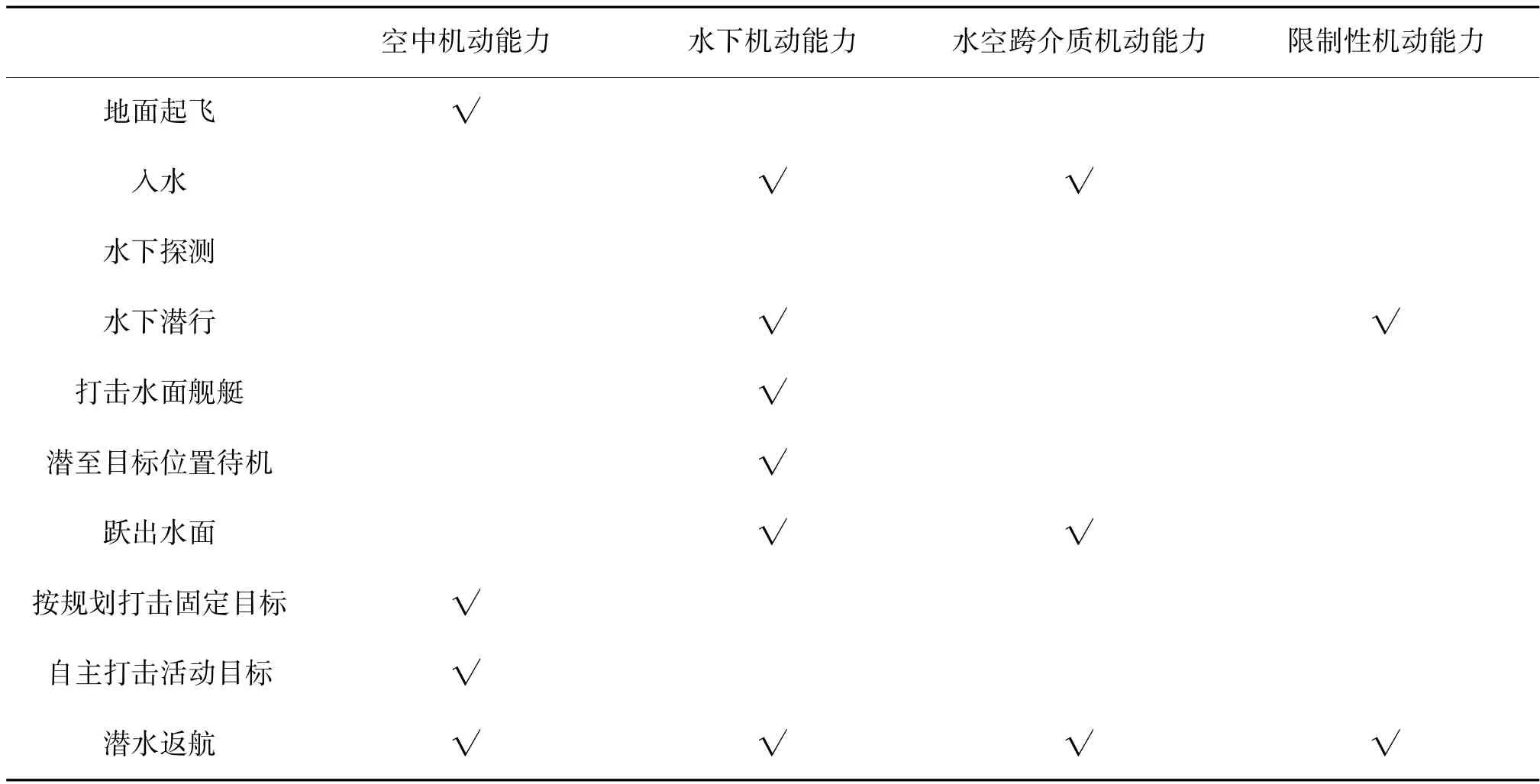
表2 无人跨介质飞行器作战能力与活动的映射Table 2 Mapping between operational capabilities and activities of the Unmanned trans-media aircraft
3.4 装备需求分析
3.4.1 梳理关键性能参数
以机动能力为例,图8 展示了空中机动能力、水下机动能力、水空跨介质机动能力、限制性机动能力的关键性能参数,采用UML 类图表述,参数以“属性”形式表示。其中,最低飞行高度是为了描述无人跨介质飞行器能否超低空飞行;水下停留待机时间是为了描述无人跨介质飞行器能否长时水下隐蔽待命。

图8 无人跨介质飞行器机动能力关键性能参数Fig. 8 Key performance parameters of mobility of the unmanned trans-media aircraft
3.4.2 确定关键性能参数值
表3 以机动能力中的空中机动能力与水下机动能力为例,列出了能力对应的主要性能参数与参数值。例如,对于“最大潜深”,由于要求无人跨介质飞行器具备贴水底运行的能力,而河水最大水深40 m,因此,“最大潜深”应达到40 m 以上;对于“水下最大航程”,由于突击目标距离边境线约40 km,无人跨介质飞行器应在红方境内入水,经水下通道隐蔽渗透至突击目标附近区域,完成作战任务后,由水下通道返航,同时考虑临时机动能源消耗,因此,“水下最大航程”应为90 km 以上。

表3 无人跨介质飞行器机动能力性能参数值Table 3 Performance parameter values of mobility of the unmanned trans-media aircraft
3.5 技术方案分析
接下来,根据装备性能需求,可对无人跨介质飞行器技术方案进行分析,确定关键技术,分析技术成熟度,具体技术细节本文不再展开。
3.6 验证与迭代
以上5 个步骤,完成了生成框架中由顶至下的映射过程,按照系统工程方法和生成框架要求,还需由下至上开展验证工作,并多次循环迭代,不断完善。例如,在验证过程中发现能力组成模型中缺乏“水下通信能力”,无法支撑实现无人跨介质飞行器接收指控中心下达作战命令这一活动,因此,需增加“水下通信能力”。
4 结论
装备需求分析对体系能力需求确定、装备战技指标论证、装备规模论证、武器装备研制等都具有重要作用,通过构建装备需求分析框架、建立模型规范描述,能够对装备需求分析提供了形式化、可操作的流程指导。
本文通过借鉴美军JCIDS 需求开发过程,参考装备体系需求开发方法,形成了面向新概念装备的需求分析框架;此外,以无人跨介质飞行器为例,按照新概念装备需求分析框架的方法流程,开展示例性的军事需求开发,得到装备的性能指标需求,推动需求分析框架的落地应用,深化无人跨介质飞行器的作战运用,通过验证与迭代,证明了需求分析框架的可靠性,可普遍适用于新概念装备军事需求生成。
