基于云计算的水深测量潮位改正体系架构探索与实践
2024-01-15彭文祥
彭文祥
(1.上海市地质调查研究院,上海 200072;2.上海市地质资料信息专业技术服务平台,上海 200072)
水深测量是智慧海洋建设、陆海统筹地质环境监测预警、海岸带与海洋灾害监测预警等研究领域最基础的工作。在现代海洋测绘中,随着GNSS 技术、单波束、多波束测深技术的进步,水深测量的定位技术与测深技术的精度能满足水深测量的要求,但因水位是动态变化的,需要将瞬时水位改正到最低理论基面或其他基面,以保证航行安全。潮位改正(又称水位改正)已成为水深测量的主要技术难题[1],其精度直接影响到最后测深数据的质量。对于沿岸水深测量的潮位改正,目前广泛使用的方法(为了叙述方便,以下简称为“广泛法”)为:首先使用已有长期潮位站,或临时潮位站进行实时水位观测,然后基于图解法、解析法、分带法[2]、时差法[3,4]或最小二乘拟合法[1,5]利用单站、双站、三站或多站改正模式,以推算研究区任意位置某时刻的瞬时水位,最后进行潮位改正。随着GNSS 技术的发展,进行了RTK、PPK、PPP 等无验潮方式潮位改正探索[6,7]。对于近海水深测量的潮位改正,也可采用广泛法,但因测区大,不易布设验潮站,一般可采用基于余水位的潮汐推算法(简称为“余水位法”)[8,9]。对于水深小于200 m 的远海水深测量的潮位改正,尽量采用广泛法与余水位法实施,若无法收集实测验潮站数据,可采用潮汐预报法[10]或GNSS 无验潮方式进行潮位改正。
目前潮位改正主要使用“广泛法”,主要利用国外的Hypack 软件进行潮位改正,该软件只支持双站与三站潮位改正[11],若有多站,需将多站进行人工分带,使用非常繁琐,效率低下,显然不实用于大范围的海岸带测深数据的潮位改正。国内已报道的水位改正软件[12-15],主要针对的潮位站数量不多时,可实施较好的潮位改正,但在潮位站较多的情况下(如超过20 个潮位站),没有高效的解决方法。本文在分析国外Hypack 软件潮位改正方法的基础上,将云计算与数据库技术集成,进行了潮位改正技术的体系架构探索与实践,并开发了完全具有自主知识产权的潮位改正信息系统,以期对大范围、涉及大量潮位站的水深测量数据进行高效的潮位改正。
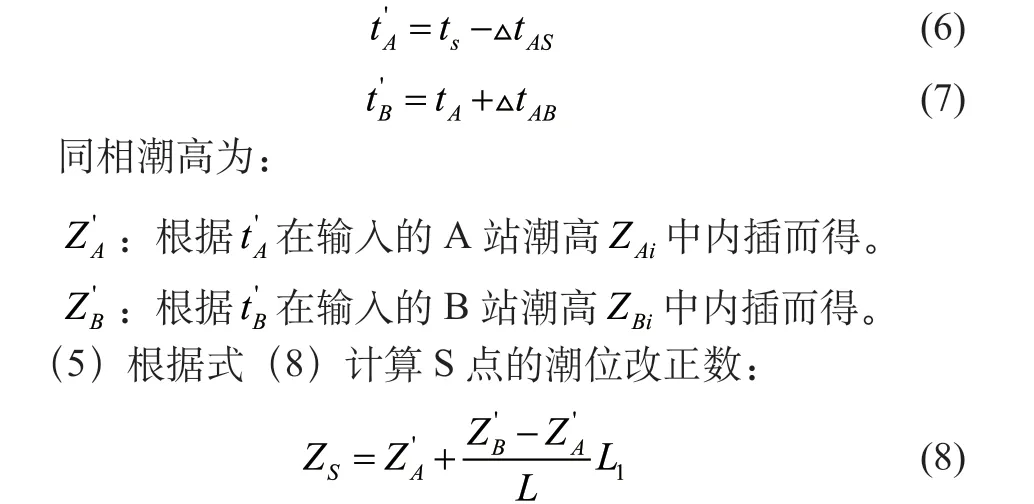
1 潮位改正方法
潮位改正的理论方法比较多,本研究主要涉及广泛法的单站改正模型、双站改正模型与三站改正模型[1,2,5,16],这些方法为后续系统研制奠定基础。
1.1 单站改正模型
在单站潮位站的有效控制距离内,以时间为横轴,潮高为纵轴,绘制潮位曲线。按照水深点的测量时间,在潮位曲线上内插潮位值,即可进行单站的潮位改正。
潮位数据测量的值是每10 分钟(或其他时间间隔)一次潮位数据,根据测量规范不满足要求,需要对潮位数据进行插值(每1 分钟一次)。插值方法可采用样条函数插值法、多项式函数插值法和三角多项式插值法。
1.2 双站改正模型
1.2.1 分带样条函数法
根据A、B 两站同步观测数据,利用二次样条插值方法,计算出相同时刻的最大潮高Δh,即可求得分带数。同时计算A、B 两站的同相潮时差tΔ ,这样,可求出双站的同相潮时tAi、tBi和同相潮高ZAi、ZBi。
根据图解法分带原理,各内插带的同相潮时和同相潮高可由式(1)与(2)求得:
式中: i = 1,2,3...N 为节点序号;p = 1,2,...k-1,带号;k 为分带数。
求得各内插站的型值点后,即可按照二次样条函数的数学模型,得到任意时刻的水位改正值。
1.2.2 直接计算法
如图1 所示,A、B 为验潮站,根据潮位数据,需要计算S 点的改正数。S’为S 在潮波传播方向AE 上的投影点,B’为B 在潮波方向上的投影点,具体计算如下:
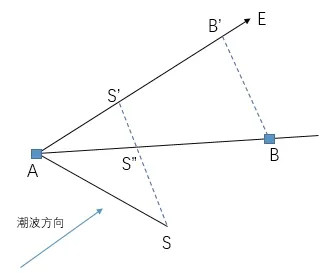
图1 双站水位改正示意图Fig.1 Schematic diagram of water level correction of two stations
(1)根据A、B 站的同步观测数据可求同相潮时差ΔtAB。
(2)计算A 至B 的坐标方位角TAB、潮波传播的坐标方位角TAE、A 至S 的坐标方位角TAS,然后根据式(3)与(4)计算距离L与1L。
(3)由于潮波传播均匀,可根据式(5),计算S 和A 的同相潮时差。
(4)以定位时刻ts为基准,可求A、B 站同相潮时和同相潮高。
同相潮时为:
1.3 三站潮位改正模型
1.3.1 计算法
如图2 所示,A、B、C 为三个验潮站,S 为待计算的水深点水位,根据式(9)计算D 点的瞬时水位Dh,其中1x根据式(10)计算。

图2 三站水位改正示意图Fig.2 Schematic diagram of water level correction for three stations
从潮波传播的角度来看,a、b 站位于同一潮波的不同位置,所以还要考虑在时移中an与bn的相似性,即把a 对应的潮时tn都减上一个潮时差t,其对应的水位bn-t与an的相关系数见式(15)。
从式(15)可知,不同的t,an与bn-t的相关程度是不同的。如果t=t0,Ra b(t0)达到最大值,an与bn-t最相似,那么t0即为要求的两站间的潮时差。
求t0的方法可采用逐步试验比对法,取R AB(t0)值最大者的t为t0,有了t0再求得定位时刻tp与a、b 两站同相潮时。这样,就可以利用两站同步观测资料求两站间任意点、任意时刻的水位改正数。
对于多站潮位改正来讲,采用三角剖分法,根据三站或双站的潮位改正模型进行改正。
2 潮位改正系统的架构
潮位改正系统的总体架构分为云计算层、数据层、方法层与应用层,如图3 所示。为了保证数据的安全与高效使用,还需要建立安全保障体系与接口服务体系。
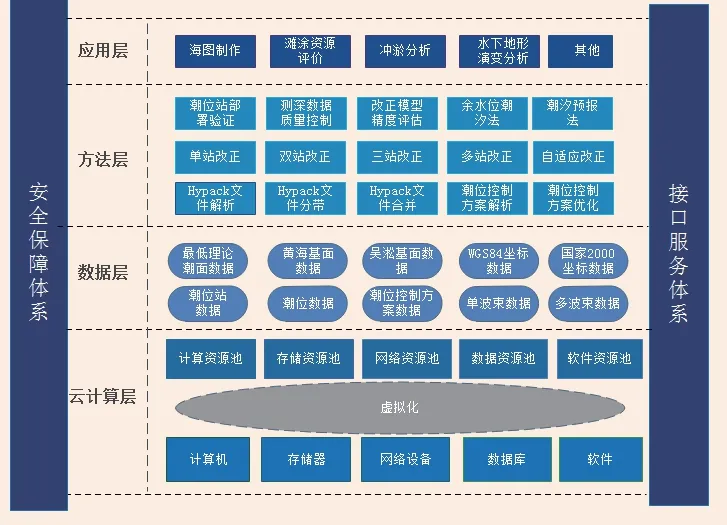
图3 潮位改正系统的总体架构Fig.3 Overall architecture of tide level correction system
2.1 云计算层
云计算(cloud computing)具有资源池化、弹性伸缩、安全可靠、需求定制、节约资金等优点[17],其服务模式主要有基础设施即服务(IaaS)、平台即服务(PaaS)、软件即服务(SaaS)、功能即服务(FaaS)。基于云计算环境,当需要进行大量潮位站与大范围测深数据处理时,通过云管理平台自动扩展资源,并通过MapReduce算法[18]与潮位控制方案结合,高效进行潮位改正。
2.2 数据层
为了满足多方面的需求如海图编制、陆海统筹的海洋环境变化监测等,需要管理多基面(吴淞基面、黄海基面、最低理论潮面等)、多坐标系统(北京54、WGS84、国家2000 等)的数据。利用时空大数据技术,将海洋测绘的数据、潮位数据、潮位控制方案数据、潮汐数据等多源异构数据统一汇集,建立时空数据仓库。
2.3 方法层
分析国际海道测量软件Hypack 的数据格式,对Hypack 文件进行解析、分带、合并等运算,以便开发的潮位改正软件可以与Hypack 软件完美结合。分析潮位控制方案数据,对于CAD 格式的潮位控制方案数据,提取潮位站数据及其连接数据,完成潮位控制方案的分带;根据测量规范[16],采用分带、分区和时差法时,需要满足相邻验潮站之间最大同步或同相潮高差不大于1 m,最大潮时差不大于2 h,因此需要提供潮位站部署验证方法。根据潮位改正的原理,在分带的基础上,自适应进行单站、双站、三站、多站的潮位改正。对于近海水深测量,若没办法布设验潮站,可以采用基于余水位的潮汐推算法[9]进行潮位改正。对于水深小于200 m 远海水深测量时,若无法收集实测验潮站数据,可以采用潮汐预报法或GNSS 无验潮方式进行潮位改正。
2.4 应用层
潮位改正后的水深数据,具有非常广泛的应用领域,可以进行海图制作、滩涂资源评价、冲淤分析、水下地形变形分析等,为智慧海洋与透明海洋的建设提供基础数据。
2.5 安全保障体系
在云计算环境中,数据的安全保障尤为重要,除了采用常用的网络安全技术如防火墙、数据加密与智能卡技术外,还需要采用新兴的网络安全技术如零信任、量子技术、通用人工智能、区块链等[19]。
2.6 接口服务体系
在云计算环境中,数据即服务(DaaS),功能即服务(FaaS),将DaaS、FaaS 等建立接口服务体系,以供外部系统调用。
3 潮位改正系统的实现
Web 技术已从Web1.0 发展到Web3.0[20]。Web1.0 即第一代互联网,主要实现了信息的展示。Web2.0 即第二代互联网,主要实现信息的动态交互,也是目前广泛使用的模式。Web3.0 即第三代互联网,将实现智能交互以及沉浸式交互。本次主要利用Web2.0 技术、C#、PostgreSQL 数据库等研制了潮位改正系统。
3.1 潮位控制方案及其分带文件生成
潮位控制尽量利用有关部门在岛礁码头上设立的长期验潮站,原有潮位站的密度不足时,按要求进行适当增设,采用长期验潮站和临时验潮站联合进行水位控制。测量区沿岸及岛屿上已有验潮站的区域,不再设站,直接利用其验潮数据。使用验潮数据前,要确认其潮位基面关系并可将潮位数据转换至所要求的深度(高程)基面上。设立临时验潮站时,若水下地形复杂、水文气象复杂区域设站间距不大于20 km;潮流性质一致、水深大于20 m、无突变水下地形,设站距离可适当延长。本次研究的潮位控制方案采用上海海岸带地质调查[21]的控制方案(图4)。水深测线超过7 000 km,潮位站超过20个,潮位改正分带有双站、三站、多站,若采用交互式的方式划分区域进行潮位改正,非常繁琐,效率非常低。利用方法层的潮位控制方案解析方法,自动生成分带文件非常高效,为后续潮位改正奠定坚实基础。
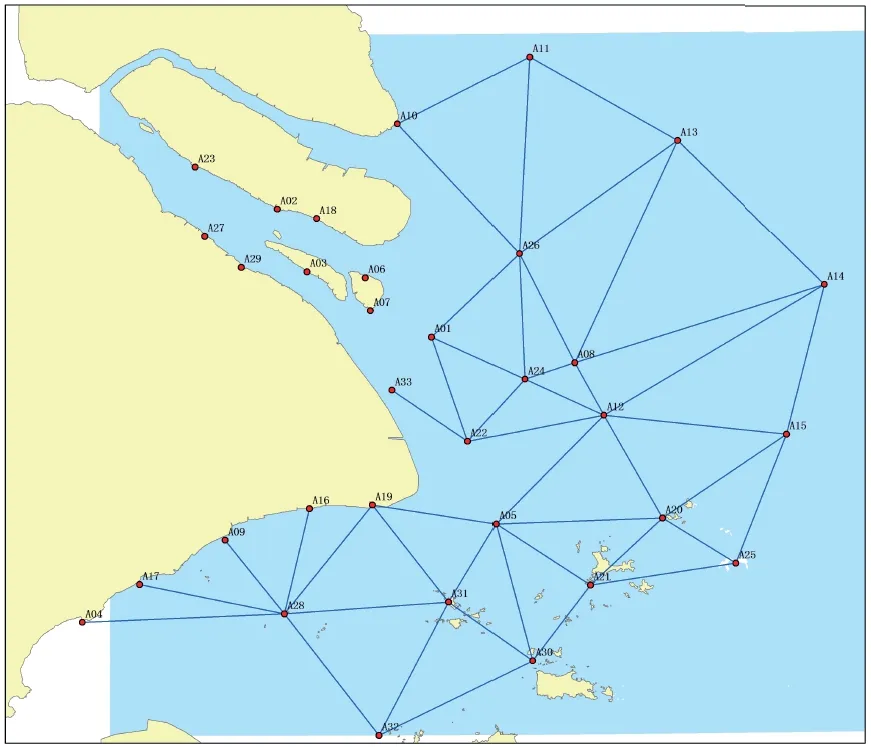
图4 潮位控制方案示意图Fig.4 Schematic diagram of tide level control scheme
3.2 潮位改正流程
将Hypack 文件与潮位控制方案结合,潮位改正的流程见图5。根据章节3.1 的潮位控制方案解析的分带文件、Hypack 格式的测深数据、验潮站的潮位数据、潮波传播方向等,系统提供计算法、时差法进行双站、三站、多站的潮位改正,并可同时进行多基面的潮位数据改正。

图5 潮位改正流程Fig.5 Tide correction process
3.3 潮位数据核对
为了保证潮位改正的正确性,需要对潮位数据进行核对,其曲线见图6。若发现潮位数据有粗差,可进行编辑修改。该项功能非常重要,因潮位数据的粗差直接影响改正后水深数据的精度。采用数据库的版本管理技术,可同时管理原始数据与修改后的数据。
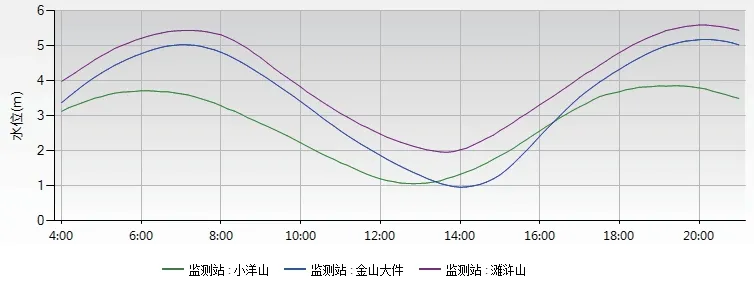
图6 潮位数据曲线图Fig.6 Tide level data graph
3.4 验证潮位站部署是否满足规范
根据《海道测量规范》判断潮位站的部署是否满足规范。《海道测量规范》规定[16]:相邻验潮站间最大同步或同相潮高差不大于1 m;最大潮时差不大于2 h;潮汐的性质基本是一样的。主要思路如下:
(1)利用时差法计算相邻潮位站的最大潮高差与最大潮时差(表1);

表1 潮时差与潮高差计算结果Table 1 Calculation results of tidal time difference and tidal height difference
(2)与规范比对,判断是否满足规范,若不满足规范,输出相关潮位站的信息。
如表1 所示,有的验潮站间的潮高差大于1 m,不满足规范要求,不能使用这些验潮站的数据进行潮位改正,需要优化潮位控制方案或重新测量。
3.5 质量控制
质量控制:根据测量规范[16],检查线总长应不少于主测线总长的5%。在不同的水深范围,深度测量的极限误差要求是不一样的,如在0~20 m 水深范围,极限误差为±0.5 m;>100 m 水深范围,极限误差为±0.03Z(Z代表水深,单位为m)。
研究思路:选主测线与检查线,求交点,分别查找交点最近点的深度值,然后计算互差(表2),统计结果。

表2 交叉法的计算结果Table 2 Calculation results of the cross method
3.6 潮位改正模型的精度评估
利用某年某月某日的测深数据,以及A、B 与C 三个验潮站的潮位数据,分别采用自主研发的软件与国际Hypack 软件进行了三站潮位改正与双站潮位改正,比对结果汇总见表3。

表3 与Hypack 软件的比对结果Table 3 Comparison results with Hypack software
实测数据验证结果表明(表3): 自主构建的潮位改正模型与国际测深数据处理Hypack 软件计算的改正数,最大互差为0.01m。然而,《海道测量规范》(GB 12327-2022)规定水位改正精度通常为0.1m。因此,利用所构建的模型进行潮位改正,其计算结果满足规范要求,完全可以在实际工作中应用。
4 结论
本文将云计算与潮位改正理论方法相结合,探索了潮位改正系统的框架;利用数据库与Web 技术研制了具有完全自主知识产权的通用潮位改正系统,为海图制作、陆海统筹的海洋环境变化监测预警,以及智慧海洋建设提供坚实的潮位改正技术支撑。该系统将数据管理与潮位改正有机结合,可提高工作效率。可处理的潮位站与文件数没有限制,只需准备好潮位控制方案、潮位数据与Hypack的测深数据文件,一键即可完成大量潮位站与大范围测深数据的潮位改正工作。系统可将测线编号自动入库,为应用系统开发奠定基础,可以自适应(不分单站、双站、三站、多站)改正潮位数据,并可同时对多基面数据(不分吴淞基面、黄海基面、理论基面)进行潮位改正。今后将研究基面转换模型、利用GNSS-R 遥感技术获取潮位数据的实用方法,并通过5G 网络传输验潮站的实测数据,以实现水深测量数据的实时潮位改正。