新型海上无人平台登临装置研究
2024-01-15戴国华庞洪林
戴国华,郝 铭,庞洪林,单 荐
(中海石油(中国)有限公司天津分公司,天津 300459)
大力发展海洋油气产业,提升海洋油气勘探开发力度,对我国能源安全意义重大[1]。随着渤海油田开发深入,越来越多的构造储量低的边际油田逐步被发现。边际油田的开发方式采用“三一”模式,无人平台依托周边的中心平台进行开发。但是渤海边际油田无人平台现有登临方式不能适应恶劣海况作业和防外部人员登临的条件,需要进行技术创新,进一步研究安全、可靠、结构紧凑的海上无人平台登临装置具有重要意义。
由于海洋水文气象条件的限制,人员登临、撤离平台是海上油气资源开发安全可控的第一要求,也是整体安全系统中的“第一颗纽扣”。一切事故都是在“人-机-环境”相互作用下发生的出乎人们意料的破坏性事件。要避免和减少事故的发生,人们就必须能控制“人-机-环境”这一系统,能预知和限制事故的发生[2]。因此,在海上无人平台登临过程中,既要保证工作人员受到过合格的安全培训,又要保障机械结构安全可靠,还要对“人-机-环境”这一综合复杂的系统进行全方位、智能化的监控和预测,在新兴的人工智能技术和电气装备的帮助下实现安全、自动的人员登临作业。
为解决上述问题,本文通过对国内外海上平台登临方式进行调研,整理分析传统海上平台登临装置技术特点,提出了一种适应当下发展形势和需求的海上无人平台登临装置,并分析海上无人平台登临装置的未来发展趋势,为未来研制新型海上无人平台登临装置,保障维保人员安全登临海上无人平台作出参考。
1 国内外研究现状
1.1 国内研究现状
国内现有海上平台常用的登临方式按照主登方式主要有以下六种组合方式(图1 和表1):第一种方式为登船平台+固定梯道,这种装置比较简易较为安全,通常用锁头防止外来人员进入,但是不可搬迁;第二种方式为登船平台+固定梯道+挂梯,这种方式同样较为简易且通过挂梯和锁头的方式防止外来人员进入,但安全性不高且不可搬迁;第三种方式为遥控悬梯+固定梯道,该装置可搬迁且安全性较高,通过提升方式防止外来人员进入,但是装置简易性较低;第四种方式为登船平台+固定梯道+遥控软钢梯,第五种方式为登船平台+固定梯道+遥控直梯,这两种登临方式均可搬迁、安全性较高、通过提升的方式防止外来人员登临,但是装置不简易且在国内使用较少;第六种方式为登船平台+固定梯道+拉伸直梯,这种装置较为简易,通过锁头防止外来人员登临,但不可搬迁且安全性较低。
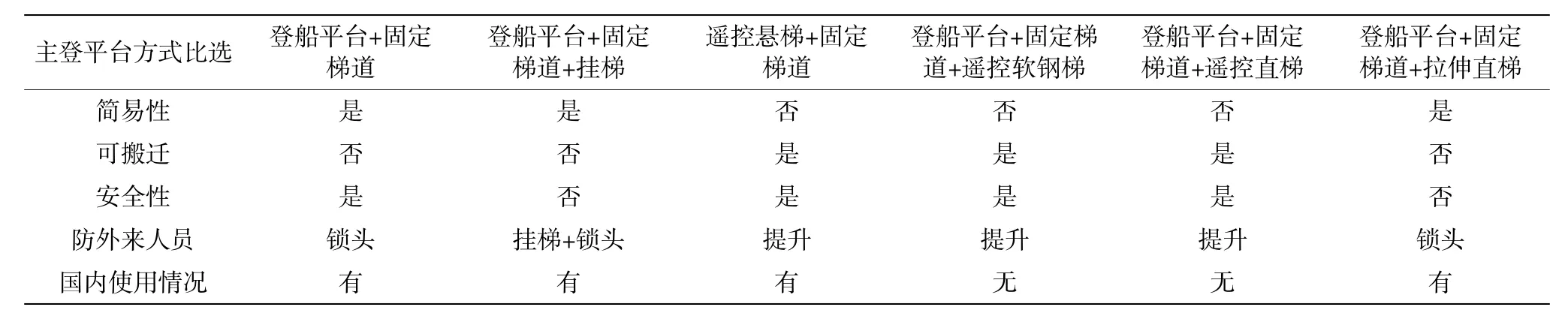
表1 海上无人平台登临方式对比

图1 国内海上平台常用登临方式[3-5]
通过比较上述几种国内常用的海上平台登临方式可见,简易性、是否可搬迁、安全性等重要问题在国内尚未解决。
1.2 国外研究现状
国外海上平台常用的登临方式主要有以下三种(图2)。

图2 国外海上平台常用登临方式[6-7]
第一种方式是对于近岸风电平台,采用小型船舶直接顶靠风机基座爬梯,并与海上风机平台塔基相互接触,利用普通登乘装置登上海上风机平台,实现作业人员的转送。这种系统适合在风浪变化小、气候状况良好的条件下使用[7],适用于小型运维船且性价比高。近些年国内海工单位也开始逐渐使用这些小型风电运维船进行人员转运,但受制于船体适航性,该系统在东海与南海作业较为困难。
第二种方式是在风机平台上安装可远程控制的伸缩舷梯,维护人员通过舷梯或与舷梯相连的挂梯(或软梯)登靠风机平台,仅可实现人员的转移。这种登临当时的主要特点是适合人员转送并且适合于尾靠船舶。
登靠舷梯能够检测运维船受海浪影响后的姿态和位移,通过控制混并联机构实现海浪的主动补偿,这样维修人员携带设备通过该平台上的廊桥能够安全平稳到海上平台[8]。但是其系统复杂,包括回转系统、变幅系统、通道伸缩系统,且设备造价高。
第三种方式是使用主动波浪补偿栈桥,通过栈桥自身的运动来抵消传播运动引起的波浪影响,使栈桥保持相对稳定的状态,补偿栈桥由基座、钢塔、桁架式伸缩桥、走道平台、司机室、液压系统和电气系统等组成。主动波浪补偿栈桥可广泛安装于浮式生产储卸油装置(Floating Production Storage and Offloading,FPSO)、风电安装船、风电安装平台等各类支持平台,可随船航行于无限航区参加相关作业。
CHEN H 等[9]提出,当起重机在船舶或移动平台上使用时,由于船体的影响,起重机的载荷运动类似于空间球摆,这使得升沉位移表现出明显的非线性运动特征。此外,检测机构的时滞和控制误差会导致补偿不及时,从而影响系统的性能。为此提出了一种先进的预测补偿方法,即粒子群优化模型预测轨迹控制器(Particle Swarm Optimization-Motion Prediction,PSO-MPTP),以提高升沉补偿性能。该方法基于模型预测控制(Model-based Predictive Control,MPC),首次应用于位置伺服系统,同时考虑了升沉预测和控制效果。该方法可对起重机载荷的升沉位移进行多步预测,并作为补偿机位置回路的输入。仿真结果表明,该控制器具有较好的预测能力、较高的控制精度和较强的鲁棒性。
由于船舶的波浪运动和绳索的柔韧性,有效载荷的摇摆是不可避免的,可能会给相关作业带来危险。WANG S H 等[10]在三柱船舶直接运动补偿的基础上,提出了一种新的海上起重机组合补偿方法——四柱组合补偿。四柱方案具有以下优点:一是可以显著降低执行机构的最大力要求;二是工作负荷在气缸间分配更均匀;三是主支撑轴可以防止平台翻倒,执行器总是推动平台,而不是双向的,这可能会降低成本和风险。
LANDSVERK R 等[11]研究了带载荷的多用途起重机与近海运输船的耦合动力学问题。利用完整约束和牛顿-欧拉动力学导出了经典的多体模型,将得到的微分代数方程(Differential Algebraic Equation,DAE)的索引-3 系统转化为索引-1 系统,并使用常用的数值求解器进行求解。
QIAN Y Z 等[12]提出了一种基于增强自适应神经网络(Neural Networks,NN)的协同海上起重机反摆动跟踪控制策略,提出了一种船舶运动预测算法来生成货物的目标轨迹,并提出了一种自适应神经网络来处理复杂的未知波浪引起的干扰。通过完整的基于Lyapunov 的稳定性分析,保证了有界跟踪性能。
2 新型海上无人平台登临装置
在综合研究国内外研究现状和现实海上平台工作需求后,本文提出一种新型海上无人平台登临装置(图3),相比于其他登临装置,这种新型海上无人平台登临装置的结构简单、占用空间小,同时具有系统可靠、便于安装、经济性好、可推广用于其他海上结构物登临作业的特点。在防控外来人员登临方面,本装置需要局域网内对克令吊和登临装置进行呼叫,因此可基本杜绝外来人员凭借该海上无人平台登临装置进入生产区域。另外,这种海上无人平台登临装置也可以作为应急撤离逃生设施,在海上平台人员逃生和撤离过程中发挥重要作用[4-5]。

图3 新型海上无人平台登临装置示意图
其中,提升系统具有运动补偿(升沉补偿)功能,可将起伏不定的运维船上的技术人员安全提升到海上石油平台的底部平台,从而避免运维船顶靠爬梯后往返于爬梯的危险环节,降低往返运维船和平台之间的人身风险。系统的运动补偿系统可以自动调节起吊绳索的位置,人员和系统挂钩连接后,即使在上下起伏的运维船上也不会受到干扰,不会造成人员和船体之间的碰撞。吊臂可前后伸缩,避免人员碰撞平台。
新型海上无人平台登临装置的登临作业流程和离开作业流程略有不同,但其相同点在于登临和离开的作业流程都分为4 个阶段。当各个控制模式转换时,通过运动轨迹平滑与光顺技术,以及力位耦合控制技术,保证吊点加速度无突变,实现运动状态的平稳过渡。
2.1 登临作业流程与控制模式
新型海上无人平台登临装置的登临作业流程与控制模式如下。
阶段1:平稳下降(稳定运动模式)。运维人员用无线遥控器发出吊钩下放指令,吊臂伸出平台,吊钩稳定、匀速下放。
阶段2:吊钩落船(升沉同步控制模式)。吊钩下降至风险区时,利用悬臂上搭载的激光位移传感器实时获取船舶的运动状态,控制系统自主建立船舶的升沉预测模型,基于系统内置的预测控制算法以及力位耦合控制策略,控制绳索的伸缩,快速将吊钩下放至甲板,缆绳处于松弛状态。
阶段3:安全脱离(高点抬升控制模式)。运维人员将吊钩扣到安全带上后,用无线遥控器发出登临指令,基于悬臂上搭载的激光位移传感器实时获取船舶(甲板)的升沉运动信息,当吊点(人员)位于升沉运动周期的高点时,控制绳索的收缩,在一个波浪运动周期内,将吊点(人员)抬升至可能发生碰撞的区域以外。
阶段4:平稳上升(稳定运动模式)。吊钩升至顶端后,吊臂回缩,吊钩再下放,将运维人员放至平台上。
2.2 离开作业流程与控制模式
新型海上无人平台登临装置的离开作业流程与控制模式如下。
阶段1:平稳下降(稳定运动模式)。运维人员将吊钩挂到安全带上,点击无线遥控器离开指令,吊钩升起至高点,吊臂伸出平台,吊点(人员)的稳定、匀速下放。
阶段2:安全落船(升沉同步控制模式)。吊点(人员)下降至风险区时,利用悬臂上搭载的激光位移传感器实时获取船舶的运动状态,控制系统自主建立船舶的升沉预测模型,基于系统内置的预测控制算法和力位耦合控制策略,控制绳索的伸缩,当甲板升至波浪波峰(高点)时快速松下缆绳,将运维人员安全下放至甲板。
阶段3:安全脱离(高点抬升控制模式)。基于悬臂上搭载的激光位移传感器实时获取船舶(甲板)的升沉运动信息,建立船舶的升沉运动实时预测模型,当甲板位于升沉运动周期的高点时,控制绳索的收缩,在一个波浪运动周期内,将吊钩抬升至可能发生碰撞的区域以外。
阶段4:平稳上升(稳定运动模式)。将吊钩升起至高点,吊臂缩回,系统回归待机状态。
2.3 安全性仿真分析
基于Fluent 软件,研究设计了安全性仿真分析实验,目的是分析作业人员在风力作用下的摆动幅度,设计合理的支撑结构主尺寸,避免撞击平台结构,保障人员在登临过程中的人身安全。本装置安全性仿真实验设计参数如表2 所示。
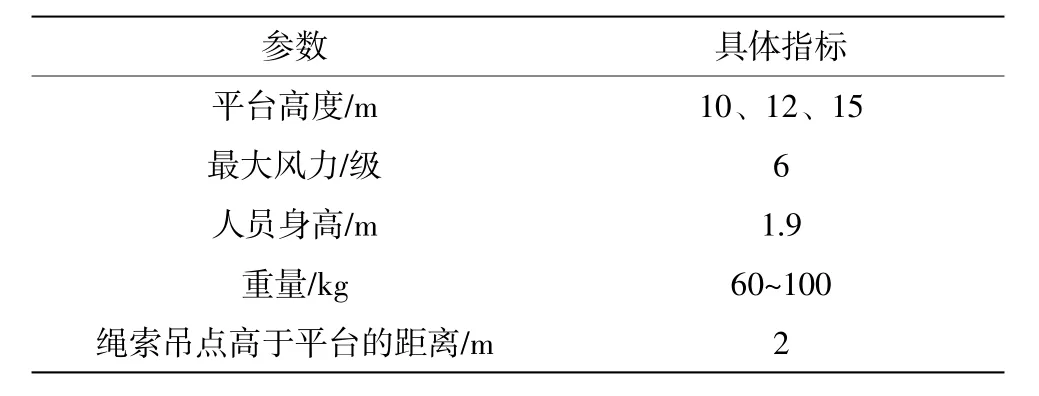
表2 安全性仿真实验设计参数
安全性仿真实验的方法是按照各种最恶劣的情况相叠加来计算,并设计支撑结构主尺寸,使得人员受风摆动后不发生碰撞(图4 和图5)。平台高度选择15 m,风力为6 级风速最大值13.8 m/s,风向正对人体与平台,体重取较小值60 kg。
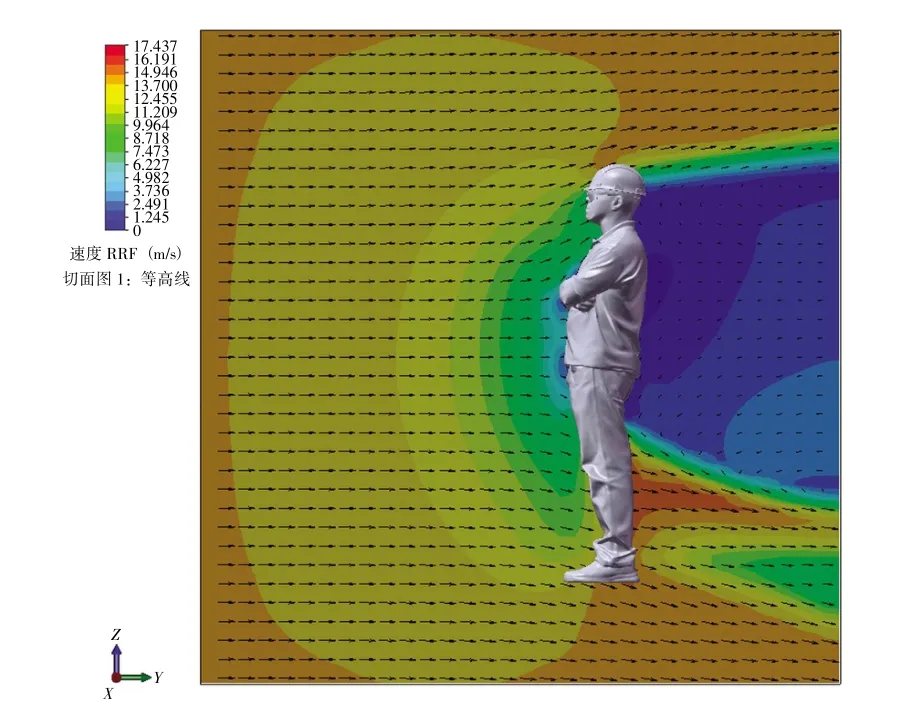
图4 流场图

图5 流迹图
根据安全性仿真实验设计的相关参数进行实验后,结果表示人体的迎风阻力约为50 N,绳索倾斜角度为4.766°。当平台高度为15 m 时,作业人员在风力作用下水平偏移距离为1.42 m。因此,为了确保人员在不高于6 级风速的登临安全时,吊机的起重臂设计值要至少要大于1.42 m。本装置安全性仿真实验结果如表3 所示。

表3 安全性仿真实验结果
3 新型海上无人平台登临装置关键技术
3.1 人员姿态识别
在海上平台登临过程中,作业人员的人身安全是最为重要的考虑因素。不同于其他研究中只对人员进行识别与定位,本设计还对人员行为姿态进行了识别与分类,充分考虑到登临过程中的人机工效,避免在人员离船过程中与甲板、吊索发生撞击,也避免在人员登临上升过程中因悬吊、扭转受到伤害。另外,安全的、具有标志性的登临姿态也可以在保护人员本身的同时,为控制系统和辅助人员传递安全作业信号,保证全过程的安全性。近年来,人体行为识别(Human Activity Recognition,HAR)技术是计算机视觉(Computer Vision,CV)领域的研究热点,但多人HAR 的研究仍存在很多技术难点。目前的少样本姿态识别工作大部分都是基于连续视频,其劣势在于可解释性差、数据维度高、难以训练和部署等问题。
本文尝试从低维的骨骼点数据上进行姿态少样本识别。这是由于一个肢体姿态可以由少量的骨骼点序列信息高效表示,大量减少了人体姿态的信息冗余,增加对作业人员人体姿态识别的可解释性。近年来有许多学者在人员动作、姿态识别领域做出了大量贡献,经典的姿态识别算法有AlphaPose、pytorchopenpose、PoseC3D、ST-GCN、MobilePose 等[13]。
在该项任务中,我们需要识别登临目标人员及姿态(图6),在计算机中重建人体关节和肢体并进行可视化表达,其难点在于降低模型分析算法的复杂程度,并能够适应各种多变的情况、环境,特别是复杂的海上作业环境对图像产生的各种不良影响。最终该项任务输出的是一个高维的姿态向量,而不是某个类别的类标,这就意味着研究需要一个神经网络,该网络学习的是一个从高维观测向量到高维姿态向量的映射。

图6 姿态识别示意图
3.2 船舶升沉运动检测及预测
船舶随波浪运动状态的精准预测是进行波浪补偿、实现精确控制、保障作业安全的重要基础。本系统内置运动状态预测模块,可基于现场传感信息自动建立并实时更新运动预测模型,短临预测(3~5 个控制周期)准确度可达95%,长时预测(1个波浪运动周期)准确度接近80%,可为作业人员在甲板上的下放与分离环节的精确控制提供模型。
船舶升沉运动检测及预测可采用激光测距或微机电系统(Microelectro Mechanical Systems,MEMS)运动传感器测量等方式。考虑到尽量简化石油平台系统来使系统简单、可靠等因素,采用北斗卫星定位系统+MEMS 运动传感器测量的方式进行测量。北斗能够实现船舶位置的测量,同时还能够与平台上的北斗进行绝对高程和相对高差的测量。MEMS陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力,测量径向加速、科里奥利加速度和切向加速度,通过计算获取运动物体的运动方向、距离等。可以将陀螺仪装置于控制终端,放置在甲板上进行测量,测量结果如图7 所示。

图7 基于北斗/MEMS 传感器组合的甲板起伏测量
3.3 波浪预测与补偿
根据陀螺仪实时测量的船舶甲板高度数据,采用深度学习算法建立船舶升沉预测模型,具体流程如下。
首先,工作船携带登临系统控制主机采集多次出海作业时海平面波浪的起伏数据,使用基于时间序列预测的深度学习算法如长短时记忆神经网络(Long Short-term Memory Networks,LSTM)、循环神经网络(Recurrent Neural Network,RNN)、双向递归神经网络(Bidirectional Recurrent Neural Network,BiRNN)等神经网络完成模型的初始训练。
其次,在使用时,模型根据采集的前3~5 s 海浪变化数据,来预测海浪起伏到最高点的时刻和最大运动幅度,从而给登临装置的上升和下降控制提供参考。
另外,此模型需具有在线学习的功能,能够不断地训练新采样的数据,从而边训练边预测,不断地提高此预测模型的准确度。
系统控制主机根据船甲板升沉测量和预测的高度值来计算吊钩起落的高度,通过无线网络向起重机和辅助设备发送操控指令,实现吊钩与甲板相对位置的恒定或张力恒定。基于前述运动预测模型实现预测控制(超前控制),能够有效解决海上运动同步或补偿过程中的滞后性问题,最大限度确保作业安全与搭乘舒适性。
3.4 二级补偿起吊
在高海况下,工作船会受风浪影响进行多角度摇摆、俯仰。除垂直升沉以外,还会进行水平位移。由此会造成登临人员离开甲板时的位置不在起重机吊绳的正下方,产生径向和侧向的偏角(图8),当偏角较大时,就会造成登临人员在空中大幅度摆动,从而引发危险。为解决这个问题,本文提出两级起吊的结构和工作模式,其系统结构和工作原理如图9 所示。

图8 径向偏角和侧向偏角
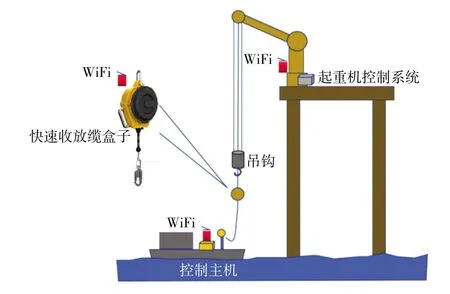
图9 两级起吊系统机构示意图
两级起吊系统机构的工作流程如下。
第一级粗调。工作人员通过遥控器向平台上的起重机控制系统发出指令,起重机转动吊臂,放下吊钩至距离甲板2 m 左右的距离,工作人员将快速收放缆盒子挂到吊钩上,收放缆盒子下方柔性缆绳放出,另一端挂到工作人员的提升安全带上。然后,起重机提起收放缆盒子升至离甲板3 m 处待命。
第二级快速微调。工作人员发出升起指令后,收放缆盒子拉紧柔性缆绳,波浪补偿和张力恒定系统开始工作,保持合适的张力,待甲板升至波峰时拉起登临人员离开甲板。再与起重机配合,将登临人员提升至平台。
这种设计有3 个优点:第一,通过起重机动-静滑轮组的组合,能够使吊臂和吊钩之间由三根缆连接,可以起到防止大幅度的偏角摆动;第二,采用独立的收放缆盒子,能够提高波浪补偿的灵敏度和整个系统的稳定性;第三,收放缆盒子可以作为独立的产品,具有广泛的应用价值。
4 结 论
本文总结了目前国内外海上平台登临方式,并提出了一种新型海上无人平台登临装置的研发方案。本文根据安全性仿真实验设计的相关参数进行实验后,结果表示人体的迎风阻力约为50 N,绳索倾斜角度为4.766°。当平台高度为15 m 时,作业人员在风力作用下水平偏移距离为1.42 m,得出6级风况下人员安全使用新型海上无人平台登临装置的臂展长度。未来新型海上无人平台登临装置的发展趋势将集中在人工智能技术的应用,以提高作业人员的安全性和工作效率。
通过人工智能技术的应用,提高登临系统的环境适应能力和智能控制能力是未来的发展方向。智能化装备具有智能控制属性和网络连接能力,可以实现对海上无人平台登临装置的远程操控。在设计过程中,我们需要考虑装置对登临人员和工作船艇的识别与定位,以及对现场水文气象条件的感知和智能调整。智能化能实时监测设备的运行状况,还能提高安全性。有学者认为,安全科学研究人及技术和环境之间的关系,以建立这三者的平衡共生态(Equilibrated Sysbiosis)为目的[15]。新型海上无人平台登临装置特别要关注登临人员的人身安全,减少环境对人员和机械安全性的不良影响,并及时将设备检修和维护的相关信息反馈给后勤维修人员。
