田间烟秆清理机械设计与试验
2024-01-15郭天水杨博凯殷梓程刘海旭罗开平
郭天水, 张 权, 王 祥, 杨博凯, 殷梓程, 刘海旭, 罗开平, 时 玲
(1.云南农业大学,云南 昆明 650201; 2.云南省烟草公司玉溪市公司,云南 玉溪 652700)
0 引言
烟秆作为废弃的污染物,却内含丰富的营养元素,研究发现,烟秆中含有大量的纤维素、氨基酸、有机碳,以及丰富的Zn、Mg、Na、Fe、Cu、B、Mn、Ca、K、P 等矿质元素[1-2]。若可以将烟秆回收,对其中丰富的营养成分加以利用,则既可以解决废弃烟秆污染环境问题,又可以变废为宝提高资源的利用率,从而降低烟草种植成本,实现烟农增收[3-4]。近年来,我国烟草的种植面积达到100 万hm2,在烟叶采摘后的烟地1 hm2就有2 250~3 000 kg 烟秆,我国每年需要清理烟秆150 万t,主要通过人工清理烟秆,费时费力[5-6]。因此,烟秆清理作业机械为减轻烟农劳动强度起到了至关重要的作用。目前烟秆清理机型普遍存在效率低、适应性差等问题[7]。基于以上背景,开展一种新型田间烟秆清理机械的设计与试验。
1 总体设计
在对云南省通海县前期的实地调研中得知,当地的烟田垄面宽640 mm、垄宽880 mm、垄高200 mm 及垄沟宽320 mm。试验烟秆品种为烤烟K326,经测量,烟秆高度950~1 390 mm、直径15~35 mm,烟秆根须高度200~270 mm、幅宽360~670 mm,烟秆之间的行距1 200 mm、株距500 mm,如图1 所示[8]。
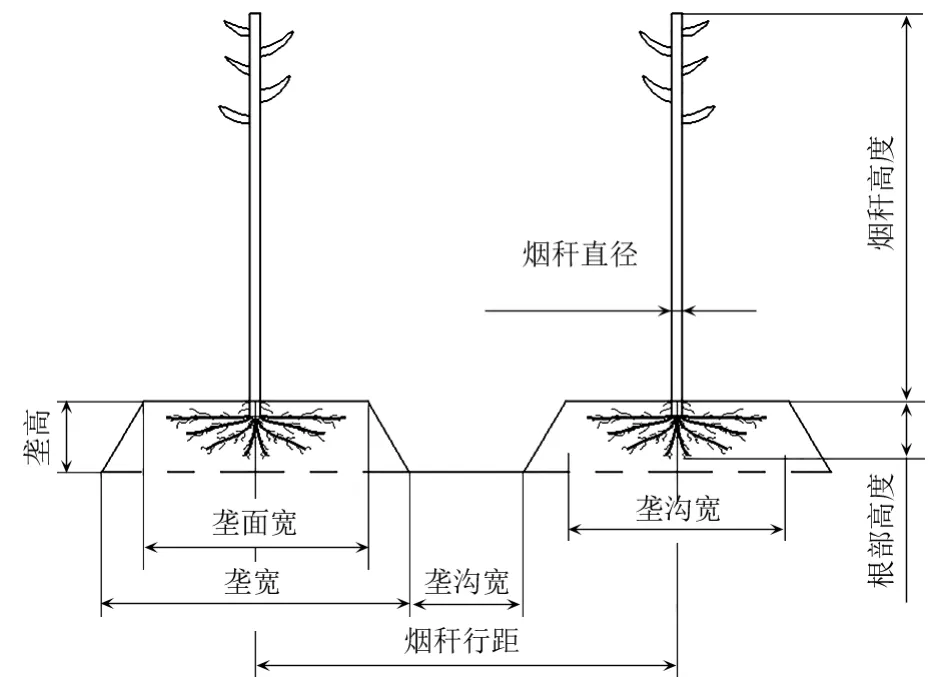
图1 烟秆农艺及形态Fig.1 Agronomy and morphology of tobacco straw
1.1 总体结构
田间烟秆清理机械整体主要由仿形扶禾器、夹持拔秆装置、松土铲、限深轮、收集箱、驾驶室、液压系统、发动机及底盘等结构组成,如图2 所示,可以一次完成双垄的松土、拔秆和收集等一系列清理作业。
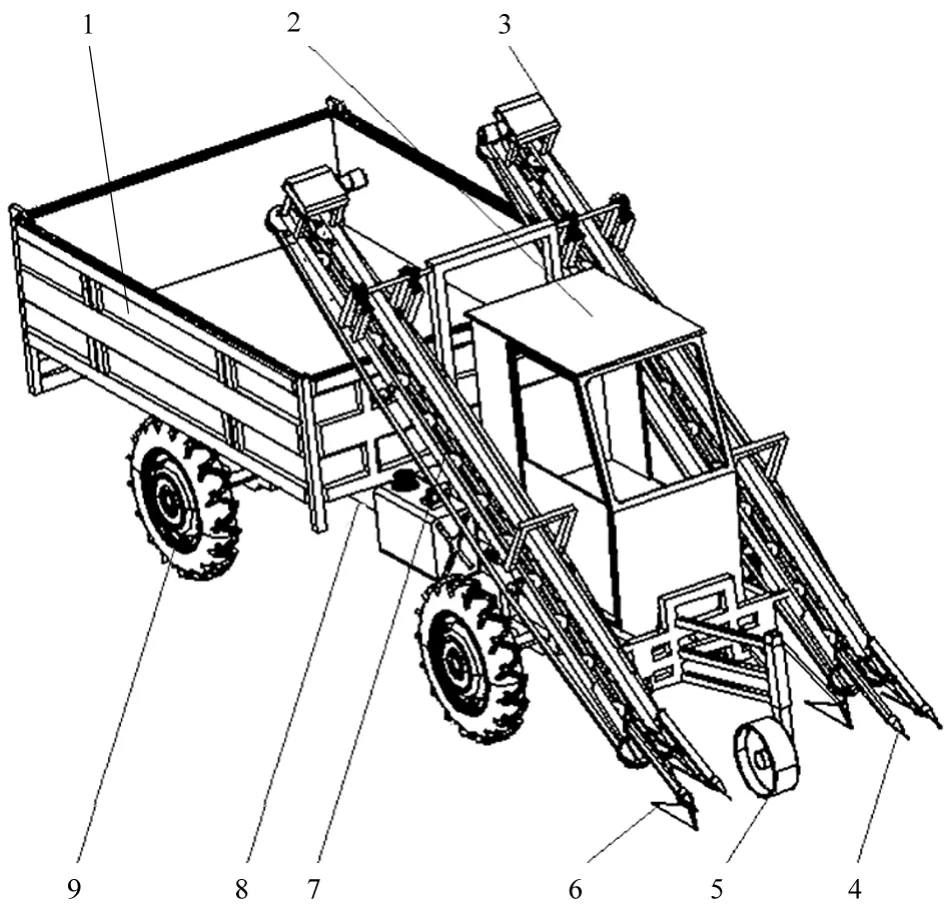
图2 田间烟秆清理机械结构Fig.2 Structure of field tobacco straw cleaning machine
1.2 工作原理
作业时,发动机将一部分动力传递给清理机械底盘驱动轮,驱动清理机械向前产生位移,另一部分动力传递给液压系统中的液压泵。液压泵将动力分成两部分,分别驱动液压缸与液压马达,一方面,液压缸带动夹持拔秆装置向下移动,与夹持拔秆装置相连的松土铲也随之下降,当松土铲下降到指定作业深度后,切换液压缸至浮动状态;同时,限深轮已接触地面,防止松土铲向下运动;当遭遇上下起伏的地面时,松土铲在浮动状态下可随地面高低波动进行调整,保证了松土铲作业的稳定。另一方面,液压马达驱动夹持拔秆装置主动带轮运转,使夹持带朝清理机械前进反方向发生位移;随着清理机械不断前进,松土铲接触并铲松烟秆根部的周围土壤,在松土铲的作用下,烟秆根部逐渐与土壤发生分离;同时在仿形扶禾器的作用下烟秆被喂入夹持拔秆装置入口并被夹持带夹紧,在松土铲与夹持带的相互影响下,烟秆被成功从土壤中拔出,并被平稳传输至收集箱,最后待作业完成或收集箱装满后运输到指定地点卸料。
1.3 技术参数
田间烟秆清理机械主要技术参数如表1 所示。
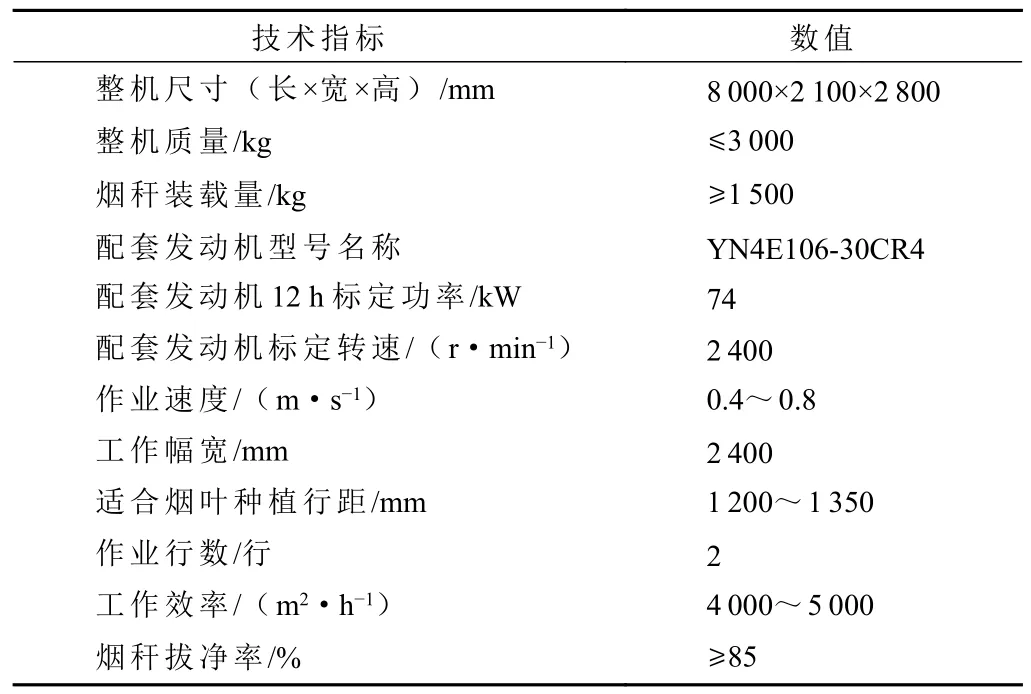
表1 田间烟秆清理机主要技术参数Tab.1 Main technical parameters of field tobacco straw cleaning machine
1.4 传动方案
由于清理机械的发动机要传递机械传动与液压传动两种不同的传动方式,所以将传动路线并分两路[9]。利用分动器将发动机动力分为两条路线,一条路线是将动力传递给液压泵,为液压传动提供动力;另一条路线将动力提供给行驶系统,其传动路线如图3 所示。
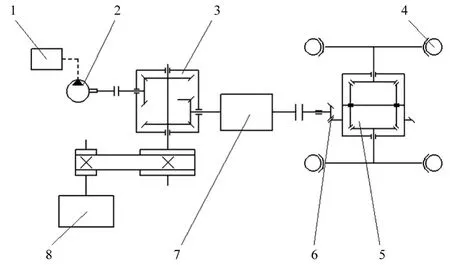
图3 清理机械传动方案Fig.3 Cleaning mechanical transmission plan
2 关键部件设计
2.1 夹持拔秆装置
2.1.1 夹持拔秆装置结构
夹持拔秆装置主要由被动带轮、内张紧轮、外张紧轮、U 型架、支架、夹持带、轴承架、主动带轮和液压马达等部件组成,如图4 所示。
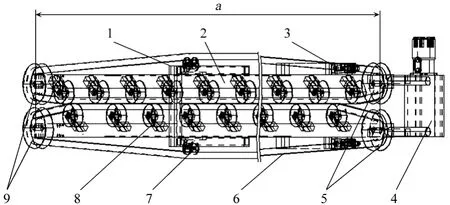
图4 夹持拔秆装置结构Fig.4 Structure of gripper straw pulling device
结构中,内张紧轮呈等距交错式排列,其目的是为了保证夹持带具有足够大又均匀的张紧力;外张紧轮的作用是防止夹持带过长导致脱轨;U 型架焊接在两侧支架上端,作用是为了将同一幅装置完全固定;轴承架与U 型架作用类似,区别是轴承架上端两侧分别安装了轴承,其原因是为了方便清理机械在不同作业环境中可能需要调换不同夹持高度进行作业,因此轴承架的作用是为了配合液压缸对夹持拔秆装置的夹持高度进行调节;安装液压马达目的是为夹持拔秆装置提供足够动力。夹持带选择橡胶材料制成的异型带,工作面部位设计防滑花纹,确保装置在夹持烟秆过程中具有较大的摩擦力且又不易将烟秆表皮组织破坏[10]。
2.1.2 夹持拔秆装置参数
(1)被动带轮与主动带轮中心距a。夹持拔秆装置共设置两幅,分别安装在驾驶室左右两侧,因烟秆之间的行距1.2 m,因此两对夹持拔秆装置的入口平面直线距离也应1.2 m;根据夹持拔秆装置与粉碎装置的位置关系,以及与清理机械整体的结构设计考虑,设定被动带轮与主动带轮中心距a=4.2 m。
(2)主动带轮与被动带轮直径。被动带轮对烟秆夹持部位的初始抓取角,与被动带轮直径、夹持间隙和烟秆夹持部位直径有关,通过参考文献[11],取夹持间隙12 mm,被动带轮与主动带轮的直径128 mm。
(3)夹持带安装倾角[12]。根据速度关系可推出以下公式。
式中Vm——清理机械作业速度,m/s
Vt——夹持拔秆装置运动速度,m/s
α——夹持拔秆装置运动速度方向与水平方向之间夹角,(°)
由于清理机械作业速度为0.4~0.6 m/s,经反复试验测得夹持拔秆装置运动速度在0.57~0.68 m/s 范围最为合适,则通过式(1)求得夹角α为8°~29°,但若夹角过小会导致夹持拔秆装置整体过长,因此在这个范围内选择角度越大结构就越紧凑,因此设定夹持拔秆装置运动速度方向与水平方向之间夹角,即夹持带安装倾角29°。
(4)夹持高度。根据烟秆形态情况,经反复试验得到烟秆夹持高度距地面220~500 mm 较为合适。
2.2 松土铲
2.2.1 松土铲结构
松土铲主要由铲头与铲柄两部分组成,如图5 所示[13]。可以使土壤铲至疏松但并不翻转,经过松土后的烟秆垂直起拔力会大幅缩减,实现根须与底部土壤分离,为烟秆的拔取提供方便[14-15]。
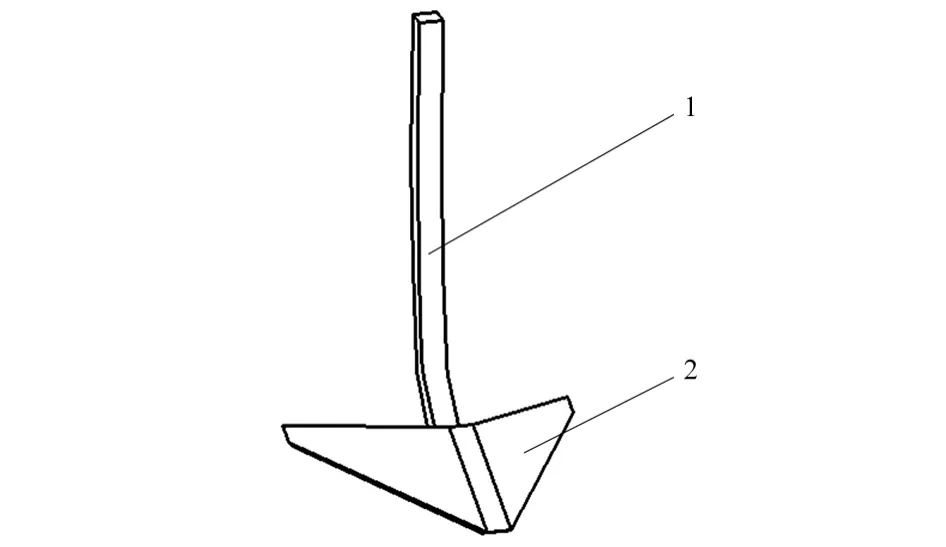
图5 松土铲结构Fig.5 Structure of loose soil shovel
2.2.2 铲头参数
松土铲铲头的主要评价指标为扰动效果和耕作阻力。通过参考文献[16]可知,影响松土铲耕作阻力的重要因素包括入土角、张角和松土铲作业深度等因素,如图6 所示。对以上3 个因素通过EDEM 仿真软件进行L9(33)正交试验,以分析扰动效果与耕作阻力情况,最终确定铲头的最佳参数,仿真正交试验因素水平如表2 所示,方法见文献[17]。通过参考文献[18],确定铲头作业幅宽300 mm、垂直高度80 mm。
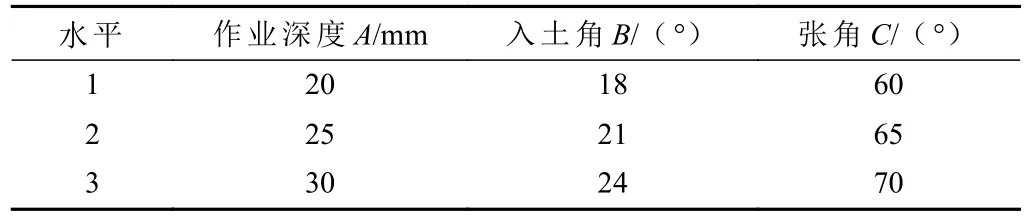
表2 仿真正交试验因素水平Tab.2 Simulation orthogonal test factor and level
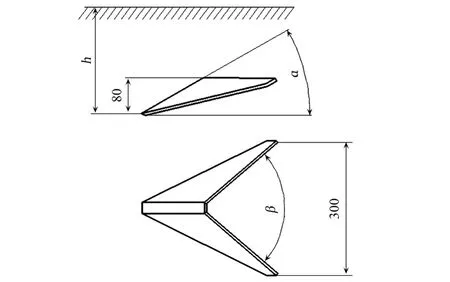
图6 铲头参数Fig.6 Shovel head parameters
(1)试验前处理。本试验定义4 种材料,分别为松土铲、0~10 cm 耕作层土壤、11~20 cm 耕作层土壤及21~40 cm 耕作层土壤,松土铲采用65Mn 材质,其EDEM 试验模型基本属性参数由文献[19-20]确定,如表3 所示。
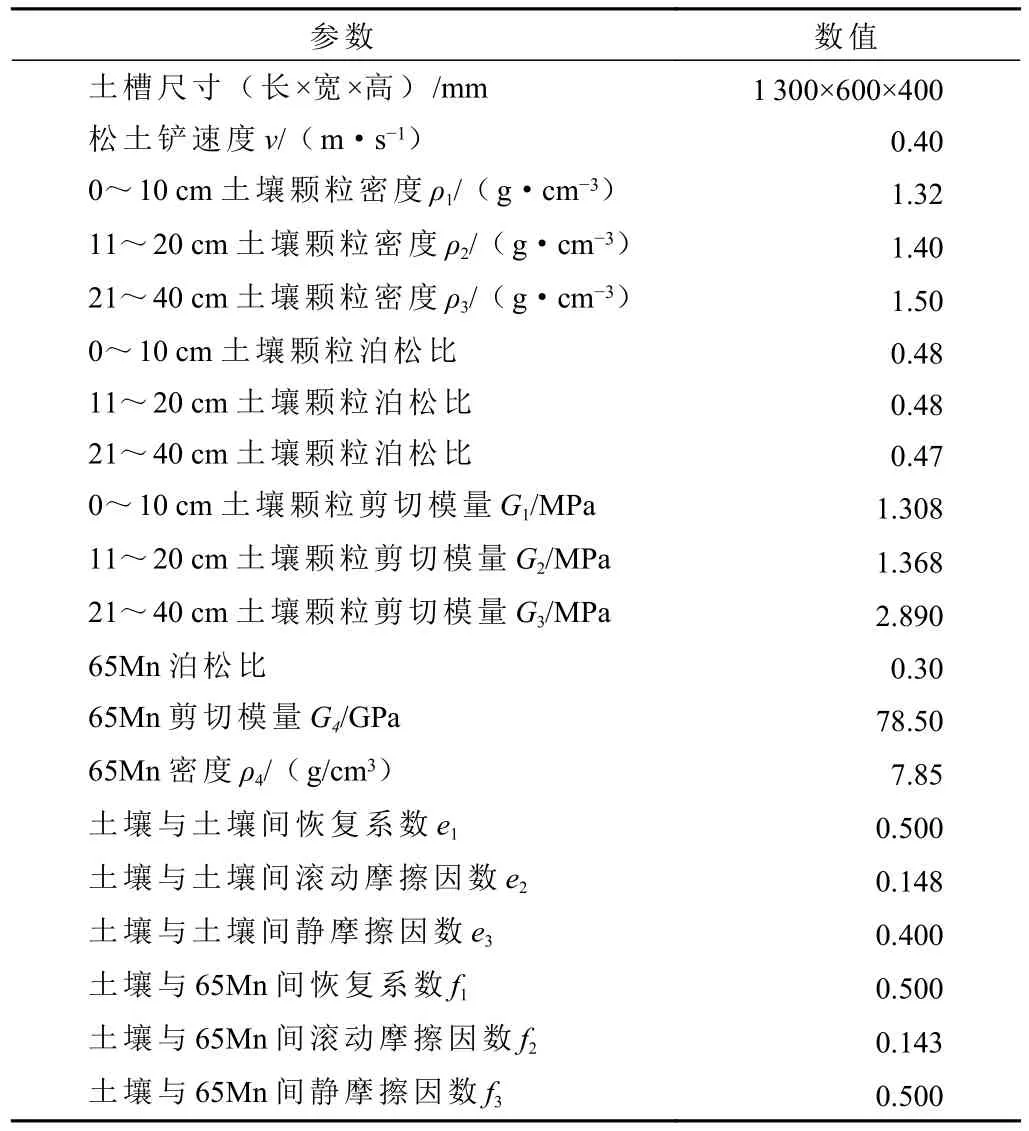
表3 EDEM 试验模型主要参数Tab.3 Main parameters of EDEM test model
(2)试验结果及分析。通过9 组EDEM 仿真正交试验,得到松土铲在稳定阶段的扰动效果与耕作阻力情况,如图7、表4 和表5 所示。
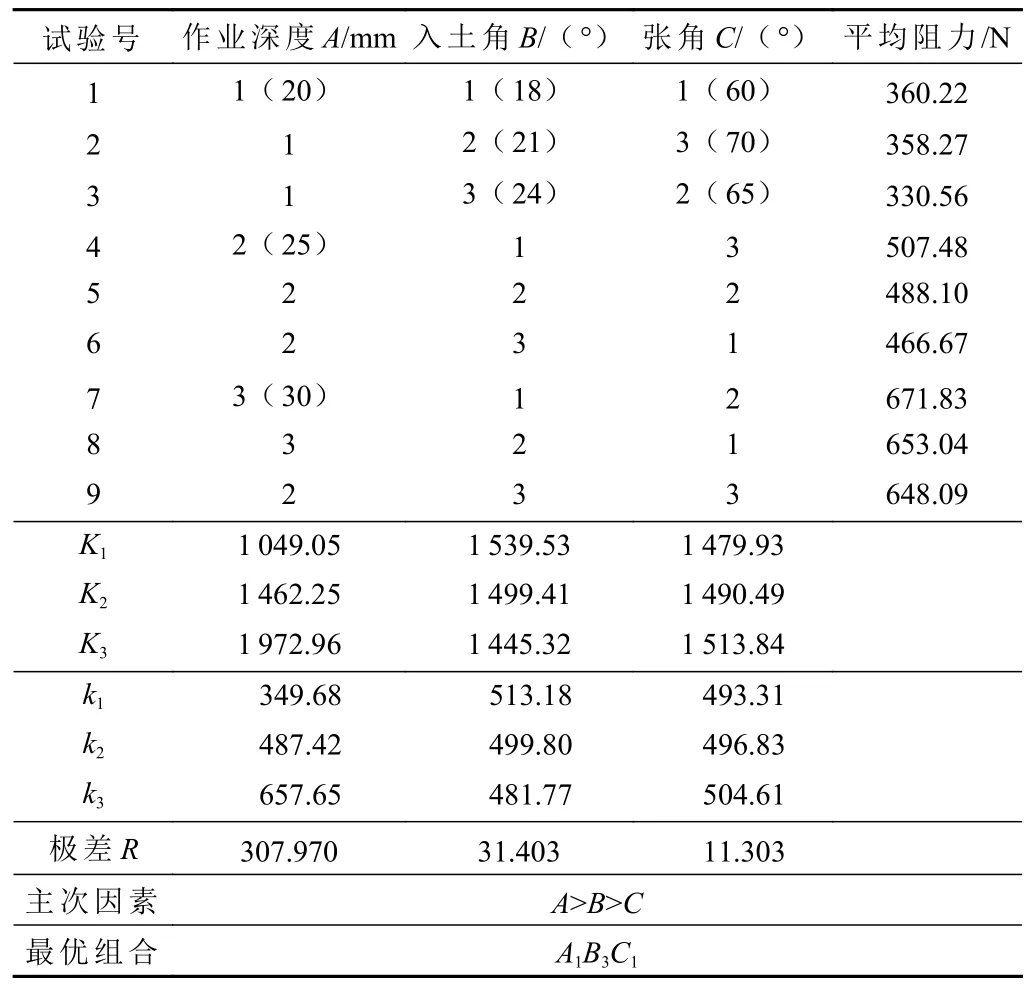
表4 松土铲耕作阻力结果与极差分析Tab.4 Results and range analysis of tillage resistance of soil shovel

表5 松土铲耕作阻力结果方差分析Tab.5 Variance analysis of soil shovel tillage resistance results
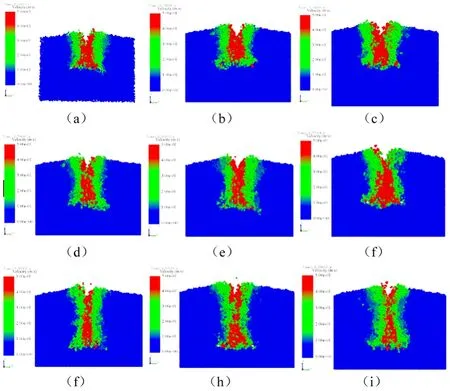
图7 松土铲土壤扰动效果Fig.7 Soil disturbance effect of loose soil shovels
由图7 可知,松土铲的土壤扰动效果与松土铲的作业深度存在显著影响,但与松土铲的入土角与张角因素影响不明显。可通过调节作业深度增加松土铲的扰动面积,扩大松土铲将根须与底部土壤分离的范围,促进根须与土壤的进一步分离。
由表4 可知,对于松土铲耕作阻力试验指标而言,影响因素A极差>B极差>C极差,说明作业深度对松土铲耕作阻力的影响因素最大,入土角次之,张角对试验影响最小。通过对比分析,正交试验最优组合为A1B3C1。
由表5 可知,对于松土铲耕作阻力指标而言,作业深度与入土角两个因素均影响极显著,张角因素影响显著。通过对松土铲土壤扰动效果与耕作阻力的综合分析,最终确定松土铲入土深度20 mm、铲头入土角24°和铲翼张角60°。对此参数进行验证试验,测得松土铲最优组合的耕作阻力320.47 N。
3 田间试验与分析
3.1 试验条件及指标
试验地点选在云南省玉溪市通海县烟草试验田。经试验前现场测量,土壤体积含水率: 深度0~10 cm为15.7%、深度10~20 cm 为33.7%;坚实度:深度10 cm 处为843.2 kPa、深度20 cm 处为2301.7 kPa;烟田垄高200 mm、垄面宽640 mm、垄宽880 mm 和垄沟宽320 mm。试验烟秆品种为烤烟K326,经测量,烟秆平均高度1 236.1 mm、平均直径25.5 mm,烟秆之间的行距1 200 mm、株距500 mm。试验时及试验前一周天气晴朗、无降水,符合试验的作业要求。
烟秆拔净率计算方法为烟秆拔净数与试验烟秆总数之比,要求烟秆拔净率≥85%。以烟秆拔净率作为试验指标,若烟秆拔净率≥85%,则认为田间烟秆清理机械作业性能良好,若烟秆拔净率<85%,则认为作业性能差,其样机如图8 所示。

图8 样机Fig.8 Prototype physical drawing
3.2 单因素试验
对样机初期田间调试过程中发现田间烟秆清理机械作业速度、夹持拔秆装置夹持带传输速度及夹持拔秆装置夹持高度对烟秆拔净率具有一定的影响。因此设计试验因素分别为清理机械作业速度、夹持带传输速度和烟秆夹持高度。每次试验烟秆垄数2 垄、烟秆总数40 根,即每垄烟秆20 根,试验完成后分别记录每次烟秆的拔净数,再根据相关公式换算成烟秆拔净率进行统计。
3.2.1 清理机械作业速度对烟秆拔净率的影响
固定夹持带传输速度0.58 m/s、夹持高度0.43 m,依次将清理机械作业速度设为0.4、0.5、0.6、0.7 和0.8 m/s 进行试验,其试验结果如图9 所示。
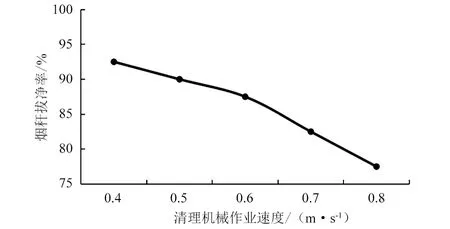
图9 清理机械前进速度与烟秆拔净率关系Fig.9 Relationship between forward speed of cleaning machine and removal rate of tobacco straw
由图9 可知,当清理机械作业速度在0.4~0.8 m/s范围内,清理机械作业速度与烟秆拔净率成反比关系,清理机械作业速度越快,烟秆拔净率越低。其中,当清理机械作业速度为0.4~0.6 m/s 时,烟秆拔净率随清理机械作业速度的增加而缓慢减小,但当清理机械作业速度为0.6~0.8 m/s 时,烟秆的拔净率随清理机械作业速度的增加而急剧减小。出现这种情况主要是因为清理机械作业速度比夹持拔秆装置夹持带的水平分速度大,在拔秆过程中烟秆发生歪倒,造成夹持拔秆装置入口发生堵塞或断秆,导致烟秆拔净率的降低,应尽量保持清理机械作业速度与夹持拔秆装置夹持带水平分速度相等,才可避免烟秆在拔秆过程中发生歪倒、堵塞和断秆现象[20]。通过对以上情况比较分析,清理机械作业速度取0.4~0.6 m/s 较合适。
3.2.2 夹持带传输速度对烟秆拔净率的影响
固定清理机械作业速度0.5 m/s、夹持高度0.43 m,依次将夹持拔秆装置夹持带传输速度调至0.53、0.58、0.63、0.68 和0.73 m/s 进行试验,其试验结果如图10所示。
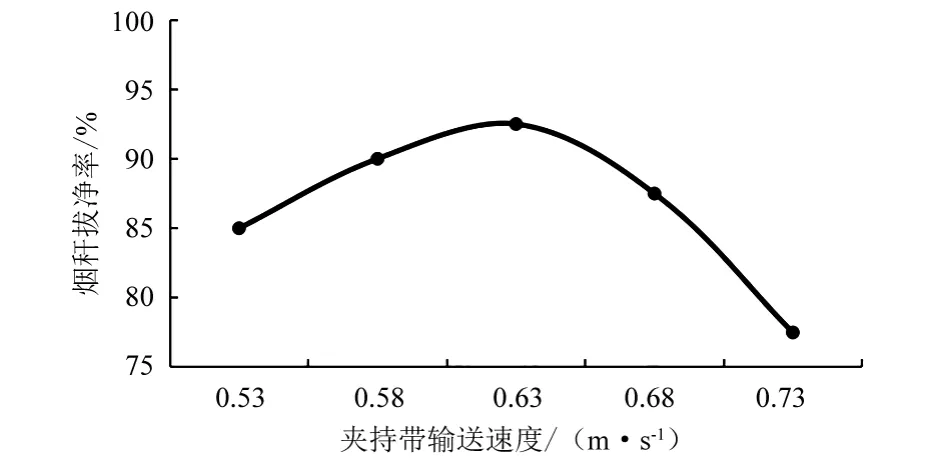
图10 夹持带传输速度与烟秆拔净率关系Fig.10 Relationship between transmission speed of gripper belt and removal rate of tobacco straw
由图10 可知,当夹持带传输速度0.53~0.63 m/s时,烟秆拔净率随着夹持带传输速度的增加而呈上升趋势;当夹持带传输速度为0.63~0.73 m/s 时,烟秆拔净率随着夹持带传输速度的增加而呈下降趋势,但当夹持带传输速度为0.63~0.68 m/s 时下降的相对较为缓慢,当夹持带传输速度超过0.68 m/s 时,烟秆拔净率下降的明显变快。造成上述现象的主要原因与清理机械作业速度试验原因相同。通过对以上情况比较分析,夹持带传输速度取0.58~0.68 m/s 比较合适。
3.2.3 夹持高度对烟秆拔净率的影响
固定清理机械作业速度0.5 m/s、夹持带传输速度0.58 m/s,依次将夹持高度调至0.22、0.29、0.36、0.43和0.50 m 进行试验,其试验结果如图11 所示。
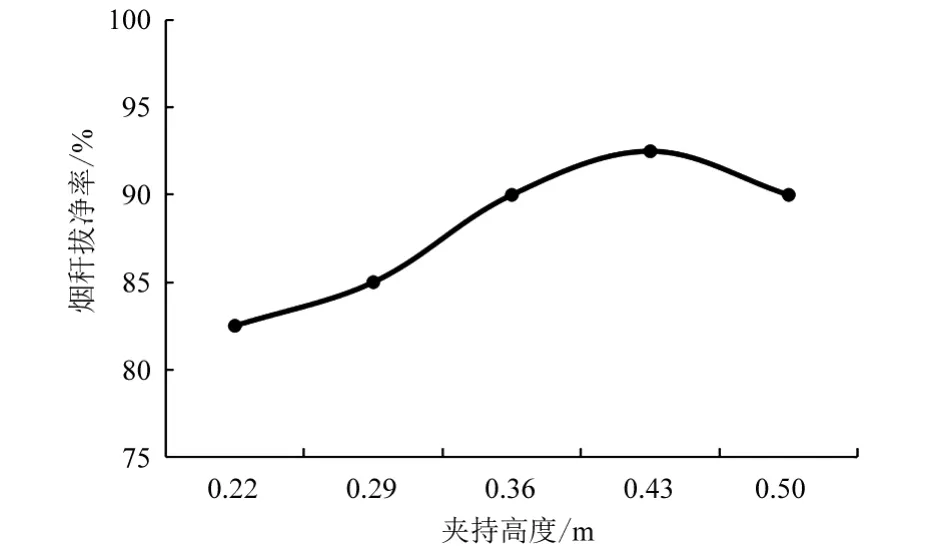
图11 夹持高度与烟秆拔净率关系Fig.11 Relationship between gripping height and removal rate of tobacco straw
由图11 可知,当夹持高度为0.22~0.43 m 时,烟秆拔净率与夹持高度呈正比,烟秆拔净率随着夹持带传输速度的增加而上升;当夹持高度为0.43~0.50 m 时,烟秆拔净率与夹持高度呈反比,烟秆拔净率随着夹持高度的增加而下降。试验中发现,若夹持高度设置过低,夹持拔秆装置在夹持烟秆时容易发生后倾歪倒,使烟秆脱离夹持带,同时仿形扶禾器容易扎进土壤造成损坏;若夹持高度设置过高,则烟秆不易被拔起,造成断秆或漏拔。通过对以上情况比较分析,夹持高度取0.36~0.50 m 比较合适。
3.3 多因素试验
3.3.1 多因素试验方案
通过单因素试验结果得知,烟秆拔净率与田间烟秆清理机械的工作参数有关,即与清理机械作业速度、夹持带传输速度和夹持高度3 个因素有关,为了分析各因素之间的交叉影响,将3 个因素设为多因素试验方案因素,再根据单因素试验分析出的合适范围中各取3 个合理参数作为水平。根据田间单因素试验结果,确定正交试验各因素水平如表6 所示。

表6 田间正交试验因素水平Tab.6 Factor and levels in field orthogonal experiments
3.3.2 多因素试验结果及分析
通过9 组田间正交试验,得到试验结果如表7 所示。
由表7 极差分析可知,对于烟秆拔净率的试验指标而言,影响因素A极差>B极差>C极差,说明清理机械作业速度对烟秆拔净率的影响最大,夹持带传输速度次之,夹持高度对试验的影响最小。通过对比分析,可得出其正交试验的最优组合为A1B1C2,即当清理机械作业速度0.4 m/s、夹持带传输速度0.58 m/s 和夹持高度0.43 m 时,烟秆拔净率最高。
由表8 可知,对于烟秆拔净率指标而言,清理机械作业速度与夹持带传输速度两个因素均影响极显著,夹持高度因素影响显著。
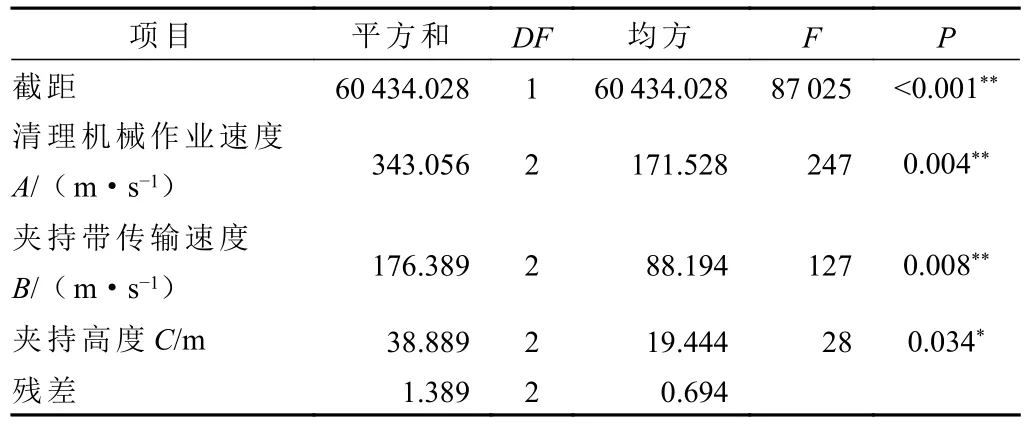
表8 田间正交试验结果方差分析Tab.8 Variance analysis of field orthogonal experiment results
通过对烟秆拔净率的综合分析,确定清理机械作业速度0.4 m/s、夹持带传输速度0.58 m/s 和夹持高度0.43 m。通过对正交试验择出的最优组合A1B1C2进行田间验证试验,测得田间烟秆拔净率为93%,大于课题要求指标85%,符合作业性能要求。
4 结束语
(1)对总体结构及传动系统进行设计,总体采用自走式机型,主要结构由仿形扶禾器、夹持拔秆装置、松土铲、限深轮、收集箱、液压系统、发动机及底盘等组成。通过发动机提供总动力,液压系统带动工作部件作业,先由松土铲铲松土壤,同时夹持拔秆装置拔取并运输烟秆,实现一次完成双垄的松土、拔秆和收集等一系列清理作业。
(2)经过对关键部件进行设计并分析,确定了夹持拔秆装置主要结构参数。采用正交试验方案通过EDEM 仿真软件分析松土铲的扰动效果与耕作阻力,通过方差分析,得知作业深度与入土角两个因素对耕作阻力产生极显著影响,张角因素对耕作阻力影响显著,综合分析后确定出最终松土铲参数:入土深度20 mm、铲头入土角24°、铲翼张角60°。
(3)田间单因素试验表明,影响烟秆拔净率的因素为清理机械作业速度、夹持带传输速度和夹持高度;田间多因素试验确定清理机械的最佳工作参数为清理机械作业速度0.4 m/s、夹持带传输速度0.58 m/s 和夹持高度0.43 m;方差分析可知,清理机械作业速度与夹持带传输速度两个因素均对烟秆拔净率产生极显著影响,夹持高度因素产生显著影响。
(4)清理机械对农艺有一定要求,若农艺未达到规定标准则作业性能会大幅下降。作为第1 代样机,在设计与结构上还有待进一步改进,如可添加粉碎装置,增加作业功能,方便烟秆的下一步处理,后续也可将作业效率作为研究重点,对机械进行升级。
