考虑道路识别的四驱电动汽车再生制动策略
2024-01-13潘公宇
潘公宇, 徐 申
(江苏大学 汽车与交通工程学院, 江苏 镇江 212013)
由于电动汽车在节能和减少污染方面有明显的优势,世界各国都在进行开发研究[1].但它们也有行驶里程短等缺点.提高能量利用率,对其制动能量进行回收,是一项有效的技术.而合理优化分配前后液压与电动机制动力是再生制动系统的关键[2].想要回收的制动能量越多,就需要将越多的再生制动力分配给驱动桥,通过驱动轴回流到电池.
有关再生制动控制策略的研究较多.由于再生制动会影响制动的效率,因此,在以联合国欧洲经济委员会(Economic Commission for Europe,ECE)汽车法规为基础的条件下,赵国柱等[3]将经典并联再生制动分配策略加以改善用于前轮驱动的纯电动汽车中.A. AKSJONOV 等[4]分析防抱死结构,并基于模糊逻辑控制策略对各电动机之间的制动转矩进行分配,可使滑移部分在车轮运动中达到最佳比例.由于电动机决定了可保存在电池中的制动能量上限[5],其外部特性对电动机非常重要[6-7].XIONG H. Y.等[8]研究双电动机驱动电动车辆,搭建了永磁同步电动机损耗效率的仿真模型.另外,在再生制动策略中,路面附着系数设为定值,当车辆处于低路面附着系数时,如制动强度较高,车轮就会抱死,车辆的稳定性就不能得到保证.因此,考虑了路面附着系数,有利于分配制动力,可以防止车轮抱死.D. PAUL等[9]研究单电动机全驱电动车辆时,使用模糊逻辑估计方法,通过将车轮控制在最优滑移率区间,让汽车车轮获得最大的地面附着力.
为了研究可回收更多制动能量且保证车辆制动稳定性的再生制动技术,笔者综合考虑双电动机外部特性与制动力分配策略的关系,设计基于道路识别器及双电动机外部特性的再生制动控制策略.
1 整车制动系统结构与制动过程分析
某四驱纯电动汽车制动系统结构如图1所示.该车采用了电液复合再生制动系统及双电动机双轴驱动[10],前后轮都是驱动轮,也可以同时再生制动.电池部分采用有较高比功率和比能量的锂离子蓄电池.

图1 四驱纯电动汽车制动系统结构图
制动时,对汽车纵向以及轮胎受力进行分析,仅考虑轮胎与路面间的纵向力时,魔术轮胎公式为
Fx=Dsin{Carctan{BS-E[BS-arctan(BS)]}},
(1)
(2)
(3)
(4)
式中:Fx为车轮制动时的纵向力;C为曲线形状因子;S为滑移率;a1-a8为轮胎在不同路面上制动时,车轮与路面间关系的拟合参数;Fz为车轮受到的垂向力.
轮胎与路面的附着系数为
(5)
若不考虑车辆的侧向附着力,前后车轮受地面的垂向作用力由质心到前后轴距离的比值来分配,仿真得到前后轮胎与路面的附着系数与滑移率的关系曲线如图2所示.
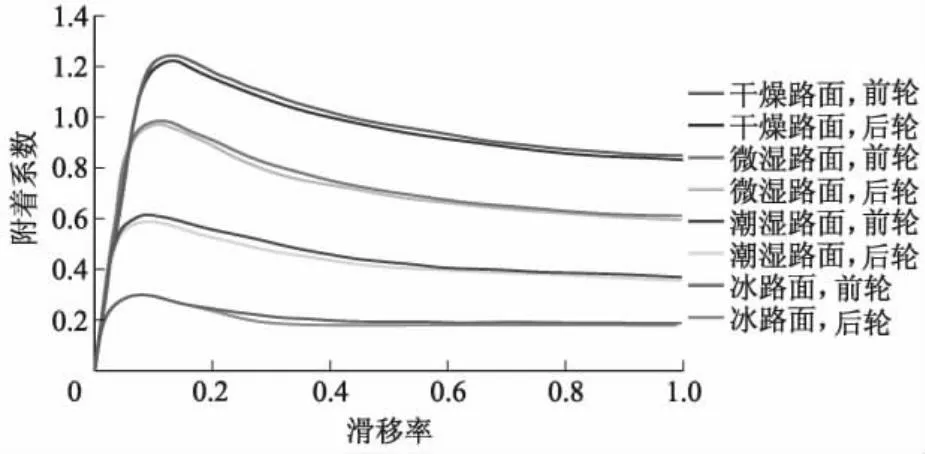
图2 前后轮胎与路面的附着系数与滑移率的关系曲线
通常在再生制动过程中,分析路面附着条件时,采用峰值纵向路面附着系数,并默认前后轮与路面之间作用的峰值纵向路面附着系数相等.地面对前后轴法向作用力不同,加上制动时车辆惯性使得载荷前移,前轮的峰值附着系数要大于或等于后轮的峰值附着系数.在分析再生制动理论时,需要分析两者是否相等以及前轮的峰值附着系数是否大于后轮的情况.
地面对前轮、后轮的最大制动力分别为
(6)
(7)
式中:G为车身重力;μf、μr分别为前轮、后轮的路面峰值附着系数;df、dr分别为质心到前轴、后轴的距离;z为制动强度;hg为质心高度;L为轴距.
式(6)、(7)相加可得制动时最大地面制动力.
2 路面识别器
路面识别器总体结构如图3所示.
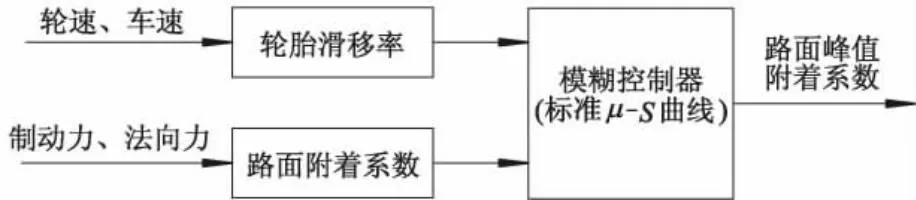
图3 路面识别器总体结构
将实时的路面附着系数和轮胎滑移率输入到路面识别器中,并与模糊控制器中存有的8条标准路面的路面附着系数-滑移率曲线作对比,得出当前路面与8条标准路面的相似程度,当前路面的峰值附着系数为
(8)
式中:μmax1-μmax8分别为8条标准路面的峰值附着系数;x1-x8分别为模糊控制计算得到的当前路面与8条标准曲线的相似程度参数.
黄亮等[11]根据Burckhardt的研究得到了一系列关于路面附着系数与滑移率的数值,如表1所示,其中:C1、C2、C3为拟合系数;Sopt为最优滑移率;μmaxi为路面峰值附着系数;大、中、小为滑移率的大、中、小.
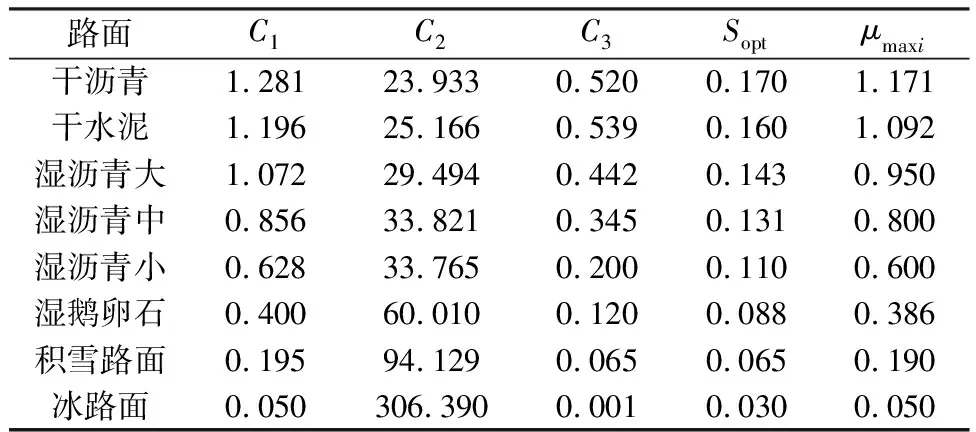
表1 μ-S拟合数据、各路面峰值附着系数及最优滑移率
将滑移率实际值模糊化处理分为小、中、大滑移率3个模糊子集,选择三角函数作为隶属度函数,在小、中、大滑移率区域附着系数的隶属度函数曲线分别如图4-6所示.考虑小滑移率区域各个曲线区分不明显,如果将路面峰值附着系数估高,对双电动机外特性再生制动控制策略而言,会使制动力控制模块输出的瞬时制动转矩增加,车轮很快发生滑转,从而促进路面识别器对路面峰值附着系数的准确辨识.因此,对于小滑移率区域,只对2种高附着路面进行比较,模糊化处理基本为直线.
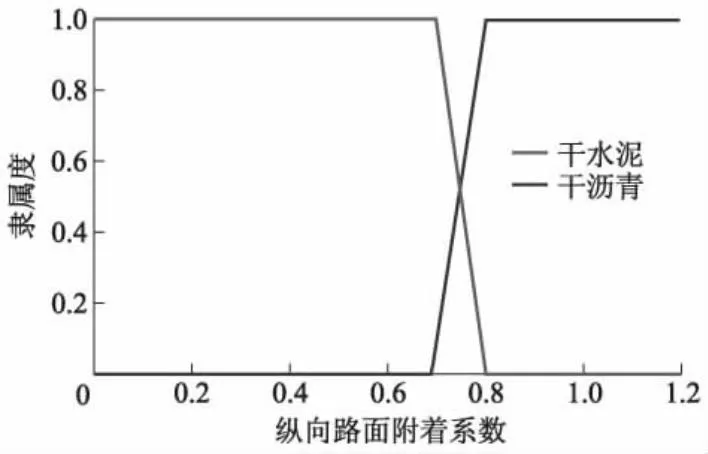
图4 小滑移率区域附着系数的隶属度函数曲线

图5 中滑移率区域附着系数的隶属度函数曲线
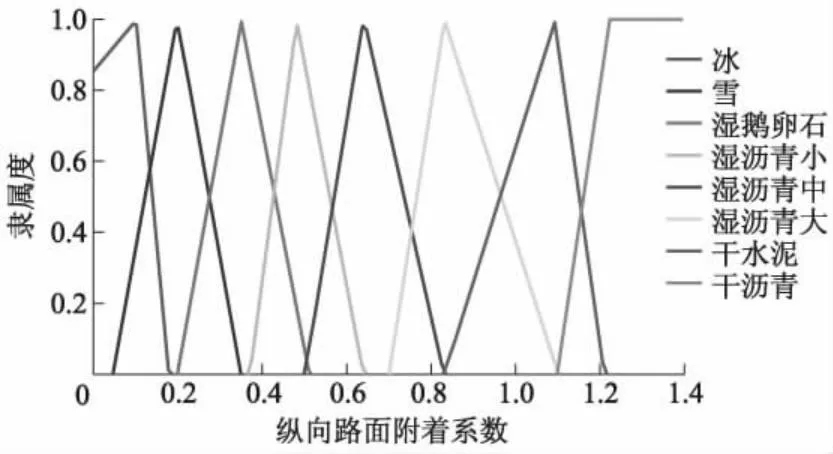
图6 大滑移率区域附着系数的隶属度函数曲线
模糊推理所得控制量要经过清晰化过程才能用于控制被控对象.推理得到当前路面与8种典型路面的相似程度,包含5个模糊子集,选用高斯型隶属度函数,使用面积中心法对8个权重系数进行清晰化处理得到相应的输出.为了防止所预测的路面峰值附着系数过大而导致后续所分配的制动力过大使得车轮抱死,采用低选原则,选取同轴的左右车轮和路面峰值附着系数,即前后轴左右轮预测附着系数均采用较低的一侧.
3 再生制动控制策略设计
根据预测的前后轮峰值路面附着系数,结合制动力的分配曲线,提出了针对前后电动机外特性的制动力分配关系,设计了电液复合的再生制动控制策略.
3.1 制动力分配过程
再生制动控制策略是为了保证安全的同时满足制动需求,并确保制动稳定性,由于路面附着条件等因素的限制,考虑前后电动机外特性会影响电动机制动力的大小,需提高再生制动力所占的比例,以使前后轴能量回收效率提高.以制动强度z为例,当μf>μr、μf=μr时,制动力分配过程分别如图7、8所示.

图7 μf>μr时制动力分配过程

图8 μf=μr时制动力分配过程
获得了M、N点坐标之后,可以对前后轴的摩擦制动力和电动机制动力进行分配.
前期判断当前为制动状态还是驱动状态.汽车制动后,若是有下面3种状态,电动机不进行制动:车速小于5 km/h,电动机的发电效率较低;荷电状态(state of charge,SOC)大于90%,电池充电效率低;z>0.8,驾驶员有紧急制动意图,采用纯液压制动.
进行再生制动以后,电液制动力的分配工作由制动强度z确定.zmax为再生制动时的最大制动强度.当μr≤z≤zmax时,若μf>μr,按H点分配前后轴制动力;若μf=μr则按C点分配前后轴制动力.前后轴的液压制动力矩和电动机制动力矩分配逻辑如下:分别以前后电动机可提供的最大制动力矩来分配前后各自再生制动力,液压制动力弥补电动机力矩的不足.
当z<μr时,先分配前轴再生制动力,为保证最大程度利用前后再生制动力,需确保M点横坐标表示的前轴制动力小于初始前液压制动力及前轴再生制动力的和,N点横坐标则大于M点.再分配后轴的再生制动力,要保证最大程度地利用后轴再生制动力,需把安全制动范围及总需求制动力纳入考虑,保证N点的纵坐标小于初始后液压制动力及后轴再生制动力的和[11],M点纵坐标则大于N点,若还未满足制动需求,则由前后液压制动力在路面条件限制下补足.
3.2 制动力分配策略
制动力分配策略如图9所示,其中:v为车速,μI为按照I曲线分配前后轴制动力时的路面附着系数[11];Fmf、Fmr分别为前后轴再生制动力;Fhf、Fhr分别为前后总的机械制动力;Fmf_max、Fmr_max分别为前后电动机最大可输出的制动力;Ff、Fr分别为前后轴制动力;Ff_I、Fr_I分别为I曲线与制动强度线交点对应的前后制动力;Fhf(0)、Fhr(0)分别为初始前后液压制动力;Fhf(1)、Fhr(1)分别为进行电液制动分配之后,再分配得到的前后液压制动力;Fneed为相应制动强度下的需求制动力;Fμf_M、Fμr_M分别为某一制动强度z下,可以分配的前后轴制动力上限值;Fμf_N、Fμr_N分别为某一制动强度z下,可以分配的前后轴制动力下限值.
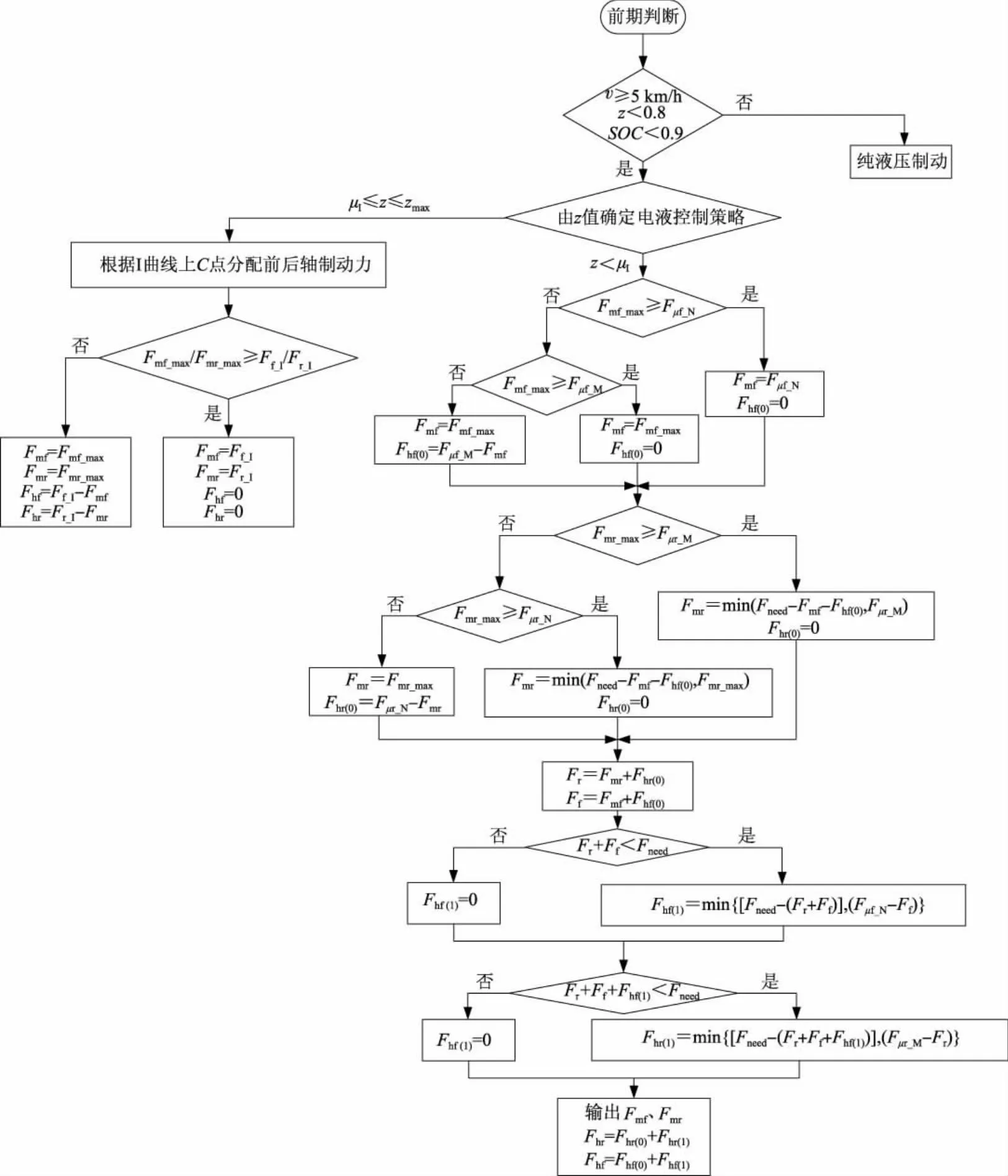
图9 制动力分配策略图
4 仿真与结果分析
研究对象为某型四驱电动汽车,其整备质量为940 kg;长、宽、高分别为3.450、1.500、1.500 m,轴距为2.260 m;该车的轮距为1.360 m;车轮半径为0.266 m;质心高度为0.480 m;质心到前轴的距离为0.904 m;质心到后轴的距离为1.356 m;车辆整体迎风面积为1.9 m2;空气阻力系数为0.3.
4.1 低制动强度制动工况
制动初速度为40 km/h,制动强度为0.3,在附着系数为0.6的路面上进行制动,直至车速为0.制动开始时电池SOC为70%.利用软件CarSim及Simulink进行仿真,结果如图10-12所示.
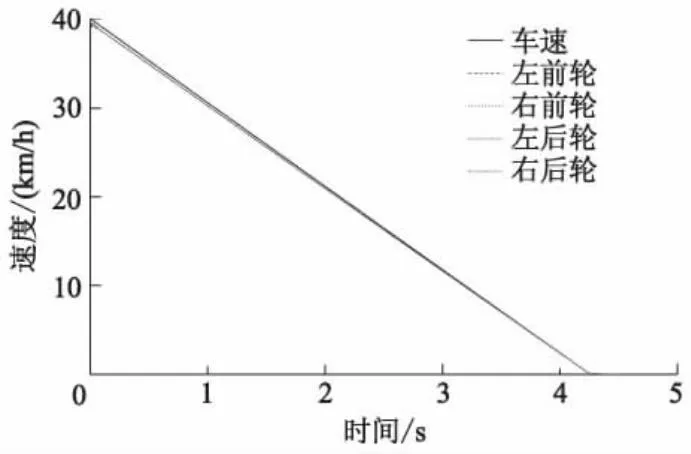
图10 低制动强度制动工况纵向车速的变化曲线
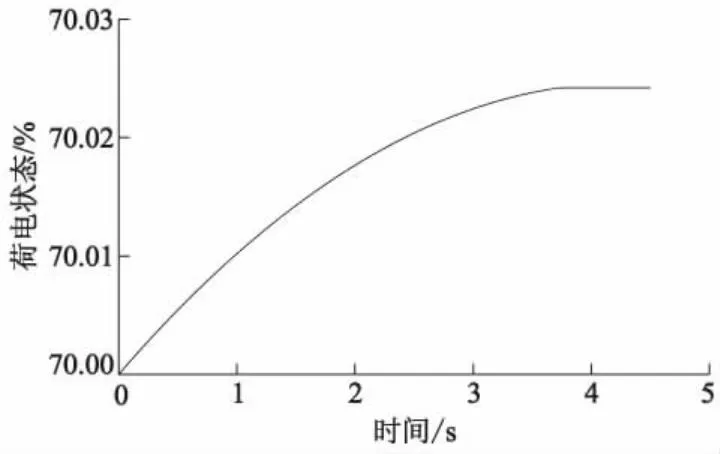
图11 低制动强度制动工况SOC的变化曲线
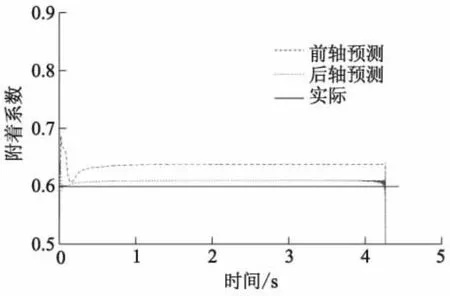
图12 低制动强度工况路面预测和实际的附着系数
制动能量回收率是制动过程中所回收的能量Er与所消耗总能量Eb的比值,仿真计算得到低制动强度制动工况的能量回收率为
(9)
从式(9)可以看出,制动能量回收率较可观,达到65.55%.在制动过程中损失的制动能量包括3部分: ① 前轴机械制动力矩所耗散的制动能量; ② 车速低于5 km/h时再生制动关闭仅采用机械制动的能量; ③ 损失于制动能量回收过程中的电动机效率、电池充电效率以及机械系统传动效率的能量.
4.2 变化路面制动工况
制动初速度为80 km/h、制动强度为0.4时,附着系数从0.2到0.8再到0.2的路面上制动,直至纵向车速为0.制动开始时电池SOC为70%.仿真结果如图13-15所示.
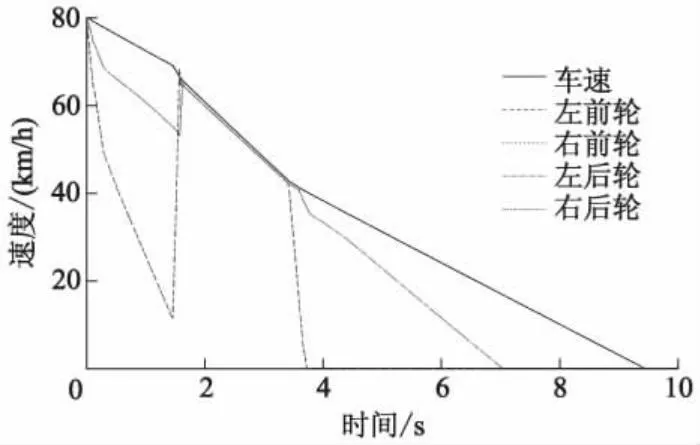
图13 变化路面制动工况纵向车速的变化曲线

图14 变化路面制动工况SOC的变化曲线

图15 变化路面制动工况路面预测与实际附着系数
从图15可以看出:预测附着系数与实际相比总体偏差不大,小部分时段存在一定的偏差,路面识别器有效,轮胎与路面附着力可得到充分利用.仿真计算得到变化路面制动工况的能量回收率为
(10)
5 结 论
以双电动机四轮驱动再生与液压复合的制动系统为基础,设计了一种针对双电动机四轮驱动的再生与液压复合制动系统,提出了基于路面和轮胎附着关系估算峰值附着系数的路面识别器再生制动控制策略.利用软件CarSim及Simulink建立模型并进行仿真,通过模拟固定与变化附着系数的相关路况进行分析.结果表明,所设计的路面识别器具有较好的效果,且再生控制策略能使车辆的制动能量回收效率达到最佳.
