平台内TMD对新型Barge浮式风机振动抑制的研究
2024-01-13蔡青青李孙伟
姜 坤,蔡青青,李孙伟
(清华大学深圳国际研究生院,广东 深圳 518055)
0 引 言
随着人们对传统化石能源的需求量急剧上升,环境污染、大气变暖等问题越来越受到关注。风能作为清洁可再生能源,储量丰富、环境友好的特点让人们的目光开始转向风力发电。相比陆上有限的风能资源,海上风能储量大的优势使其具有更加广阔的应用前景。当前在近海海域,固定式海上风机的商业化进程已经比较成熟,但在深远海海域,固定风机所带来的安装和维护成本使得海上浮式风机替代其成为主流。相比固定式风机的固定基础,浮式风机因其漂浮的特点具有较高的运动响应。近年来,结构振动控制技术被广泛应用于海上风力机,以对抗风、浪、流、冰、地震等环境荷载的影响。尤其是最简单的被动结构控制技术,因风力机大幅度运动和复杂环境载荷作用,成为抑制风力机振动的重要方法。
目前,对浮式风机在风浪载荷联合作用下振动控制的研究并不完善,已有研究多考虑在机舱、塔架等位置采用调谐质量阻尼器(tuned mass dampel,TMD)等被动控制方法抑振。2007年,Spillane等人[1]提出一种利用调谐振荡器抑制深水张力腿平台长周期垂直运动的方法,安装在TLP柱上的一对沉箱内部的水柱充当TMD,对平台的振动起到了抑制效果。Lackner等人[2]于2011年提出用TMD抑制漂浮式风力机振动的想法,并研究了机舱装配TMD对驳船式漂浮式风力机的减振效果。Stewart等人[3~5]利用拉格朗日方程建立了一个简化的驳船式浮式风力机的平台-塔架-TMD模型,结果显示,TMD可将风力机所受的横向疲劳载荷降低40%。2013年,Chen等人[6]改进传统TMD,提出了一种调谐滚球阻尼器,该装置通过单个或多个钢球在球形容器中运动,有效减小了风力机风致振动。2014年,Si等人[7]通过建模、仿真、优化,研究了将TMD安装在Spar型浮式风力机上的减振效果,结果表明,在平台上部放置TMD时,风机减振效果更加明显。
国内虽起步较晚,但近些年也在海上漂浮式风力机振动控制方面做出了一些研究尝试。樊亚军[8]研究了利用主动质量阻尼器(active mass damper,AMD)对风力机纵荡位移振动进行智能控制的模拟,结果显示机舱和塔架最大振幅均减小33%。丁勤卫等人[9]在Barge型漂浮式风力机机舱配置TMD,实现了漂浮式风力机稳定性的控制,横摇运动抑制效果提高了53%。贺尔铭等人[10]在Spar式浮动风力机平台内放置多个TMD,在机舱放置一个TMD并施加主动控制力,形成混合质量阻尼器(hybrid mass damper,HMD)。基于TMD-HMD的主被动混合控制,风机平台的运动抑制效果相比单个TMD的被动控制,有了大幅提高。
在现有研究中,研究人员多将风力机作为一个细长结构,大多数被动控制手段也都集中于风力发电机的机舱和塔架部位。这必然会导致塔架和平台连接处弯矩过大,且TMD运动行程也会受限。因此,当前一些学者提出对于平台尺寸较大的风机类型如驳船式漂浮式风力机,尝试在风机平台内部添加阻尼装置控制振动[11~13]。该方法很好地解决了TMD在狭小的机舱范围内行程受限的问题,且安装维修相比机舱塔架更加方便。因而,在风机平台内添加TMD不失为研究浮式风机振动抑制的新方向和途径。
本文针对一种新型Barge浮式风机,基于美国国家可再生能源实验室(National Renewable Energy Laboratory,NREL)开发的风机动力学仿真软件FAST,建立其动力学全自由度耦合模型,在特定环境工况下对TMD的参数进行优化设计,并分析研究最优TMD的减振效果,为未来Barge类浮式风机振动控制的工程实践应用提供参考。
1 新型Barge式浮式风机模型
1.1 漂浮式风力机模型
Barge型浮式风机最早由W. Vijfhuizen于2006年提出初步设计理念[14],并与ITI Energy公司合作提出设计模型;2007年,Jason Jonkman进行了改进[15],搭载NREL 5MW基准风力发电机组,轮毂高度为90m。在方型平台中央设计了正方形月池,以便于安装波浪能发电装置。系泊系统由8根悬链线组成,其中,每两根悬链线与浮式平台底部的一个棱角附近的导缆器相连,两悬链线之间呈45°夹角[15]。其整体设计理念如图1[16]所示。
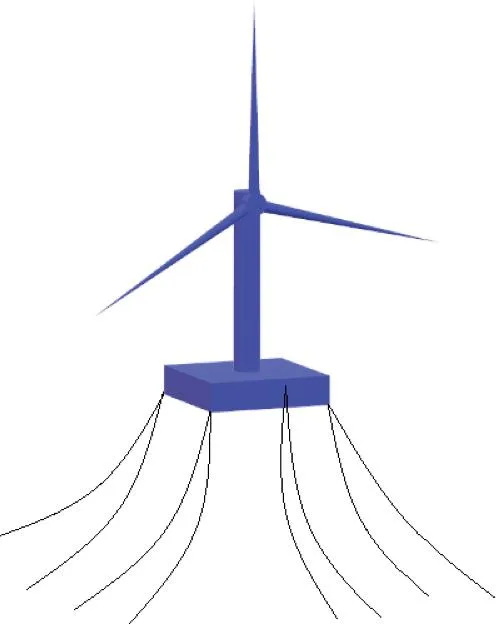
图1 ITI Energy Barge浮式风机概念图Fig.1 Conceptual figure of ITI Energy Barge floating wind turbine
本文基于此ITI Energy Barge漂浮式风力机,去除波浪能发电装置波分,设计了一种新型Barge式漂浮式风力机。风力机平台由外浮筒和内浮筒构成,外浮筒采用与ITI Energy Barge相同的方型结构,月池中间放置圆柱型内浮筒,内浮筒与外浮筒之间通过均匀分布的4根钢丝绳连接,钢丝绳张紧力可调节;内浮筒上方搭载NREL 5MW风力机,风机平台尺寸示意图如图2所示,风力机参数和风机平台结构参数如表1和表2所示。

图2 新型浮式风机平台尺寸示意图Fig.2 Schematic diagram of the size of the new floating wind turbine platform
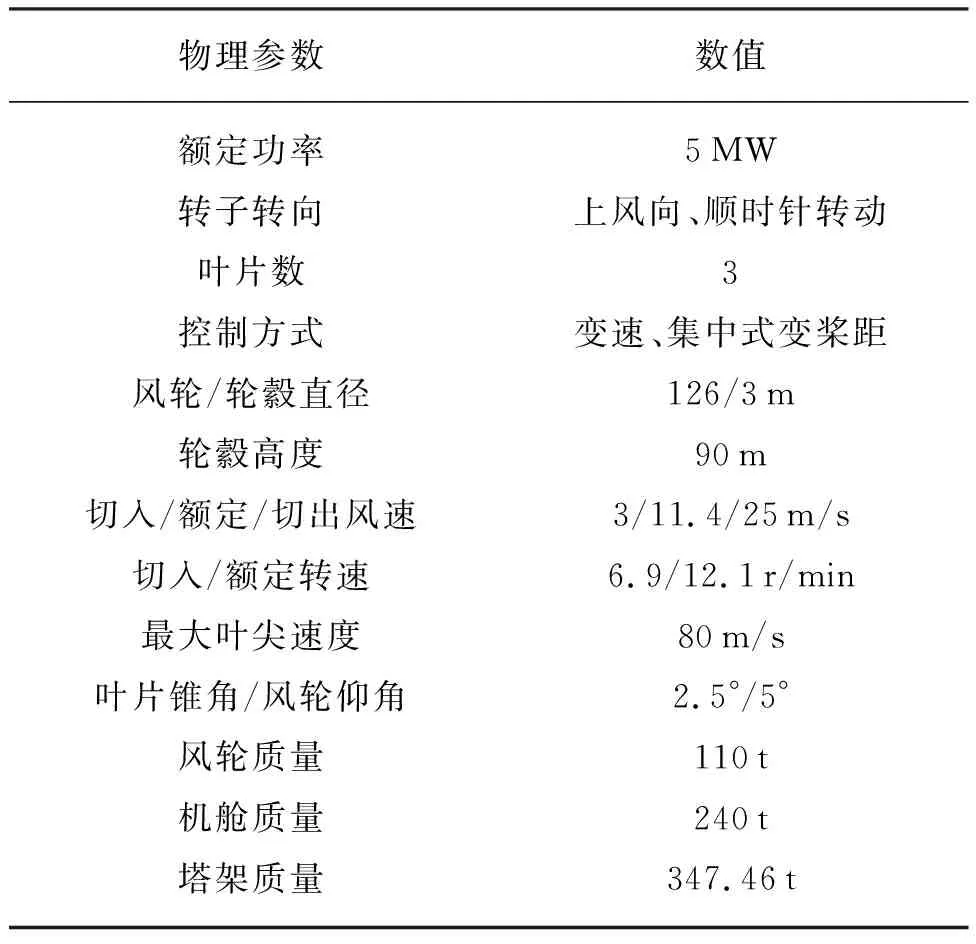
表1 NREL 5MW风力机主要参数Tab.1 Main parameters of NREL 5MW wind turbine

表2 新型Barge式浮式风机平台结构参数Tab.2 Structural parameters of the new Barge floating wind turbine platform
相比现有Barge式浮式风机,新型Barge浮式风机采用多浮体设计,在前期制造安装和后期运维中更为便利;内外浮筒间可调节钢绳连接的设计使得内浮筒运动响应相比外浮筒有一定程度减小,确保了风机主体结构的稳定性。
1.2 TMD模型
TMD是一种高层建筑结构中常用的被动控制装置,由质量块、弹簧减振器、阻尼器等组成。主要通过改变TMD的质量、刚度、阻尼等参数,调整其自振频率接近主体结构固有频率,当主体结构在外部载荷作用下发生振动时,TMD系统产生调谐惯性力,系统能量通过TMD耗散,从而实现抑制结构振动的目的。在TMD耦合风机平台后,可以将原有简化成单自由度系统的主体结构视为双自由度系统,其耦合模型如图3所示。
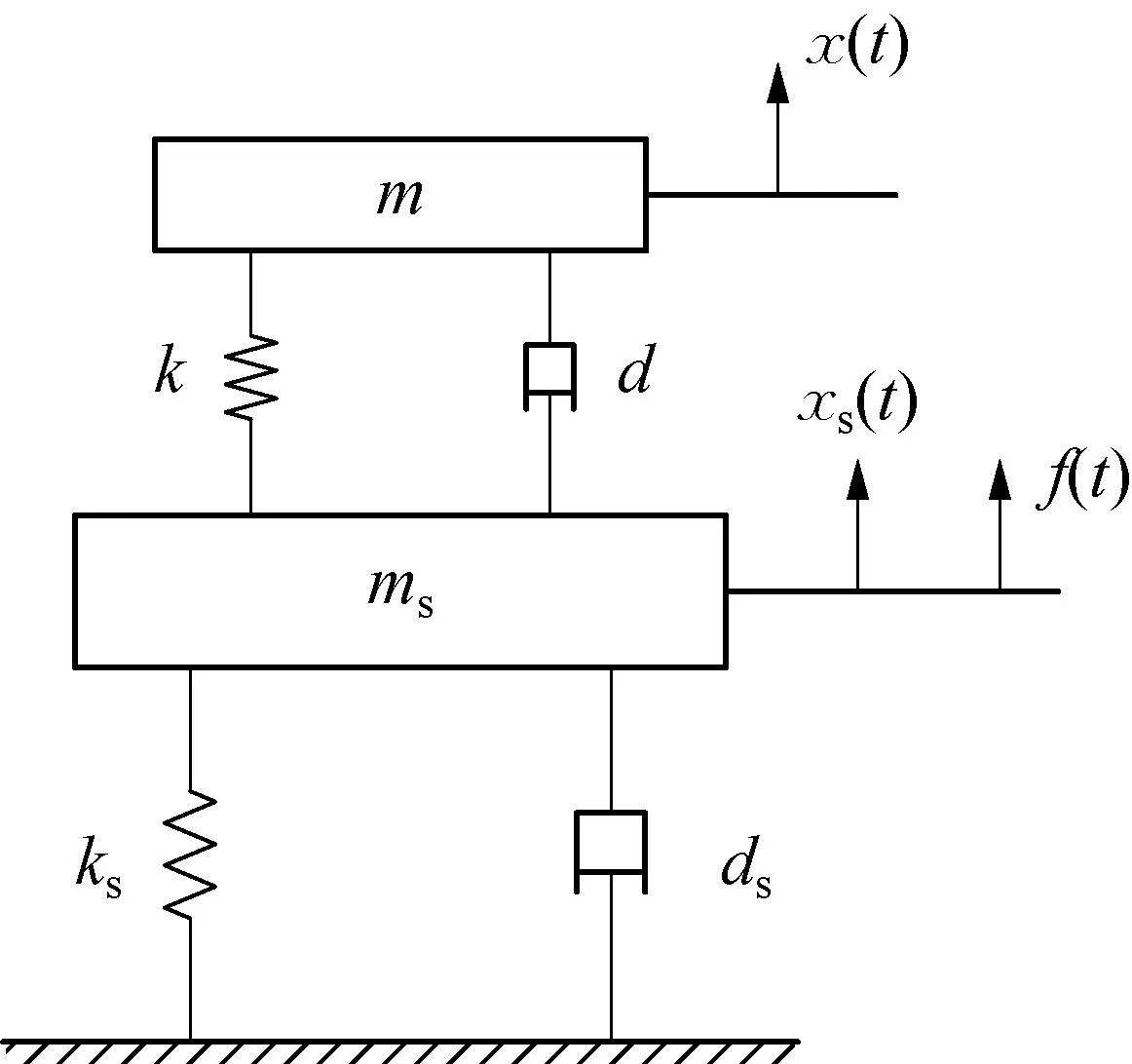
图3 TMD与风机系统耦合模型示意图Fig.3 Schematic diagram of coupling model of TMD and wind turbine system
该双自由度系统的运动方程如下:
(1)
式中,ms代表支撑系统的重量,ks代表支撑系统的刚度,d代表支撑系统的阻尼,f(t)为外激励,x(t)、xs(t)分别为子结构、主结构的位移反应。
解上述运动方程可得风机系统和TMD的振动响应如下:
(2)
(3)
风机系统和TMD的固有频率分别为
(4)
(5)
TMD的刚度(k)及阻尼(d)可由下式计算:
(6)
d=4πfdξdm
(7)
式中,fd为TMD自振频率,m为TMD质量,ξd为阻尼比。由此可见,风力机结构的运动由TMD质量、刚度与阻尼共同确定。
2 环境工况
Barge式浮式风机的设计工作海域水深为150m,为探究其在南海海域实际工作的运动响应情况,依据DNV的相关规范,选定某简化工况对其进行动力响应分析[17]。作业工况的风况条件选取的是该浮式风机搭载的风力发电机组额定工作时,轮毂处定常风速U90,波浪参数选取南海海域月均最大有义波高Hs和谱峰周期Tp,对应波浪谱模型选择JONSWAP谱。风向和浪向一致,均为风机运动前后方向。该工况的具体环境输入参数如表3所示。每个模拟工况时长为3000s,计算步长为0.005s,共6×105个工况点参数。
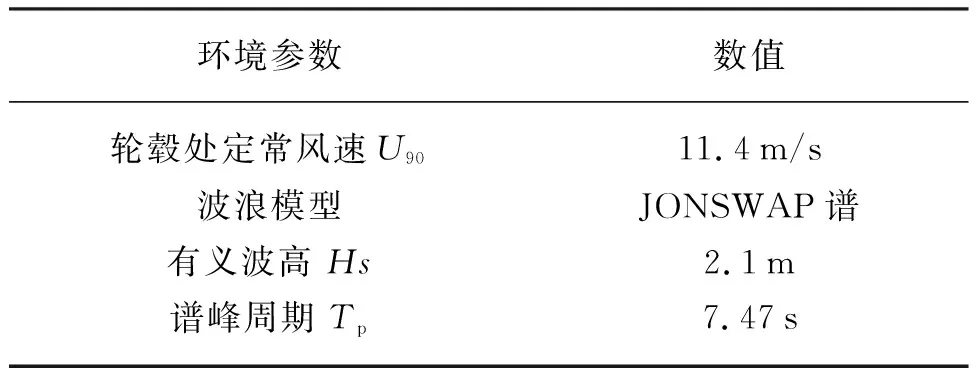
表3 作业工况的环境参数Tab.3 Environmental parameters of operating conditions
3 浮动平台TMD参数设计
漂浮式风力机在载荷联合作用下的发电效率和结构稳定性易受平台摇荡影响,平台摇荡过大幅度会导致风机结构失去稳性。本文TMD参数设计主要以平台响应最大的俯仰运动控制效果为评价指标,基于前文风浪条件,对比平台配置不同位置、质量比、阻尼比的TMD对该新型Barge浮式风机运动的抑制效果。风机某指标标准差抑制率可由下式计算:
(8)
式中,σs、σt分别是无TMD和有TMD时某指标的标准差,η为某指标抑制率。
3.1 平台TMD位置
本小节研究在新型Barge浮式风机平台中添加TMD的位置。考虑到平台添加TMD的安装空间,分别在平台垂直方向距离内浮筒底部中心0m、 2m、 4m、 6m、 8m、 10m、质心位置(与内浮筒底部中心垂直距离3.72m)处放置相同参数的TMD进行工况模拟,约定在三维笛卡尔坐标系中风机平台和静水面的相交平面中心为坐标原点。TMD参数设计如表4所示。

表4 TMD设计参数Tab.4 TMD design parameters
下文基于平台纵摇标准差抑制率,利用有理数逼近,很好地拟合出其随TMD位置变化的曲线,如图4所示。
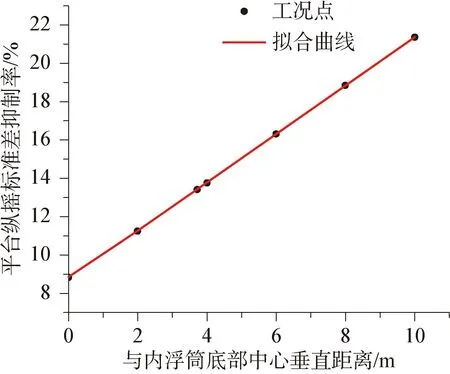
图4 纵摇抑制率随TMD位置变化曲线Fig.4 Variation curve of pitch suppression rate with TMD position
拟合函数如下:
(9)
式中,ηp为平台纵摇标准差抑制率,x为与内浮筒底部中心垂直距离。根据上图拟合曲线和拟合函数,在与内浮筒底部中心垂直距离0~10m内纵摇抑制率曲线增速均超过线性增速;拟合函数在横坐标与内浮筒底部中心垂直距离为15m时增速开始小于线性速度。但由于内浮筒存在空间限制,横坐标范围在0~10m内,因此,可认为内浮筒内部添加TMD的工况中,TMD位置位于内浮筒上部顶端时纵摇抑制效果最佳,此时平台纵摇较小21.36%,塔顶前后位移减小14.53%。
3.2 平台TMD质量
传统建筑结构中TMD参数多基于Den Hartog原则[18]选取确定,TMD质量占主体结构质量的比重一般为0.25%~2%。目前,对于海上浮式风机结构TMD控制参数尚未形成原则规范。本文借鉴传统高耸建筑的设计经验,同时考虑在海上浮式风机平台添加TMD的特点:由于在平台安装TMD受限于空间和行程,TMD质量比不宜设置过大,否则其重力将影响风机平台运动的固有频率,且TMD运动偏转将会导致风机附加重力矩的产生,进一步增加控制难度。因此,基于前文TMD最优位置,选取TMD质量比分别为0.2%、 0.4%、 0.6%、 0.8%、 1%、 1.5%、 2%、 2.5%、 3%的工况进行模拟,TMD阻尼比固定为10%。基于这9个工况,采用有理数逼近的方法,拟合出平台纵摇抑制率随TMD质量比变化曲线,如图5所示。
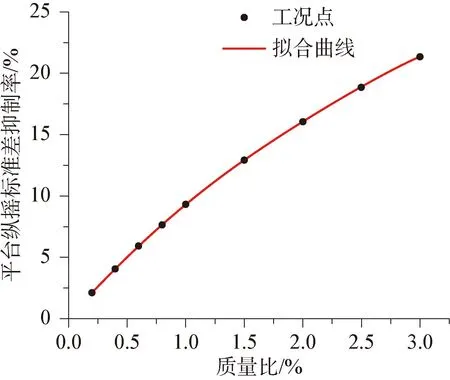
图5 纵摇抑制率随TMD质量比变化曲线Fig.5 Variation curve of pitch suppression rate with TMD mass ratio
对于平台纵摇,拟合函数如下:
(10)
式中,ηp为平台纵摇标准差抑制率,μ为质量比。根据拟合曲线,对于平台纵摇,TMD质量比μ为12.8%时,曲线增幅开始小于线性增长幅度。鉴于配置TMD的经济可行性需要考虑其质量成本和安装空间成本,本文TMD的质量比被控制在0.5%~3%内。在这个范围内,随着TMD质量比增加,平台纵摇抑制率不断增加,且增速越来越快。因此,选取质量比为3%的TMD既能满足振动控制的目标,也具有经济可行性。
3.3 平台TMD阻尼
基于前文TMD最优位置和最优质量比,在阻尼比5%~50%范围内选取10个TMD工况研究对平台运动的控制效果,阻尼比分别设置为5%、 6%、 7%、 8%、 9%、 10%、 20%、 30%、 40%、 50%。模拟此十个工况后同样得到每个工况下平台纵摇的标准差抑制率。前文模拟中随着TMD质量比的增加,平台运动控制效果越来越好。此处十个工况下随着TMD阻尼比的增加,平台纵摇抑制率随阻尼比变大呈现先增后减的变化趋势。如图6所示,根据这10个工况,用有理数逼近方法拟合出平台纵摇运动抑制率随TMD阻尼比变化曲线。
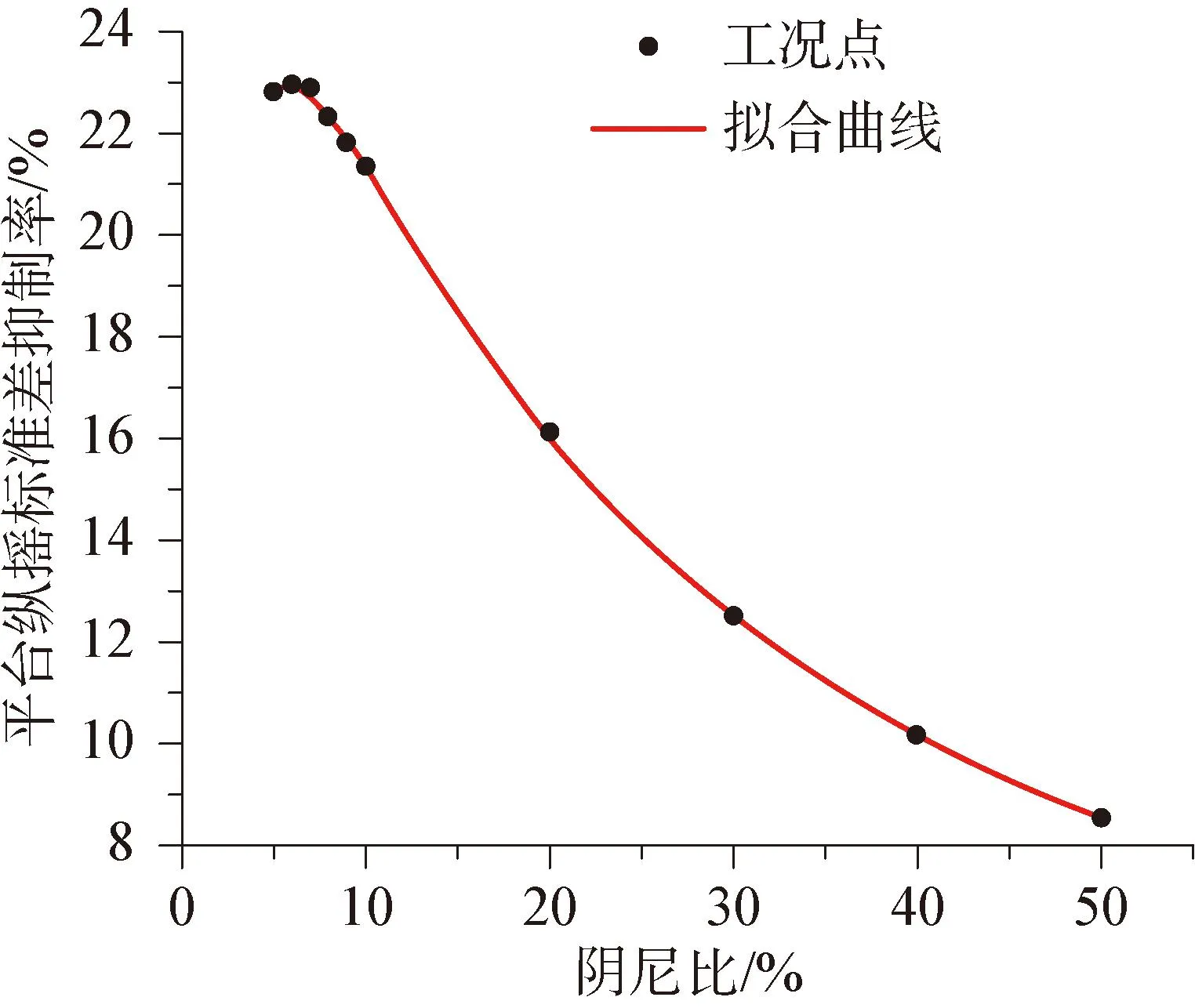
图6 纵摇抑制率随TMD阻尼比变化曲线Fig.6 Variation curve of pitch suppression rate with TMD damping ratio
平台纵摇抑制率随TMD阻尼比变化的拟合函数如下:
(11)
式中,ηp为平台纵摇标准差抑制率,c为阻尼比。不同于前文中纵摇抑制率随TMD质量比变化曲线,随着TMD阻尼比增大,平台纵摇呈现先增后减的变化趋势;在TMD阻尼比为3.9%时,曲线增速开始小于线性增速;在TMD阻尼比为5.8%时,曲线纵坐标平台纵摇标准差抑制率达到最大值22.98%。由此可以得出,TMD阻尼比取为6%时,对平台纵摇的抑制率效果几乎最佳。此时,塔顶前后位移同样有很好的控制效果,稳定性提高了15.56%。
4 最优TMD减振效果分析
上文基于俯仰运动抑制效果得到该新型Barge风机平台添加TMD的最优参数,为研究该TMD对风机整体结构的控制效果,以塔顶位移、塔基弯矩和平台运动为评价指标,选取2500~2800s时间区间,对比平台添加该TMD前后风机运动响应的变化。
4.1 塔顶位移
图7所示为新型Barge浮式风机在平台添加TMD前后塔顶位移响应的时程曲线。由图可知,TMD控制前后风机塔顶前后位移分别为-0.89~0.92m和-0.71~0.7m,风机塔顶左右位移分别为-0.04~0.05m和-0.02~0.02m;计算得知控制前后塔顶前后位移标准差分别为0.38m和0.32m,塔顶左右位移标准差分别为0.01m和0.005m。平台添加TMD后,塔顶前后位移标准差减小15.56%,塔顶左右位移标准差减小44.93%。可见对于塔顶位移,平台TMD有很好的抑制率。

(a) 塔顶前后位移

(b) 塔顶左右位移图7 塔顶位移时程曲线Fig.7 Time-history curve of tower top displacement
4.2 平台运动
图8所示为风机平台纵摇、横摇运动的时历曲线和功率谱。对于纵摇运动,风机在平台添加TMD前后响应幅度分别为-4.19°~4.44°和-3.05°~2.67°,标准差分别为1.95°和1.5°,减小幅度为22.97%;对于纵摇功率谱,在低频0.1Hz附近无控制功率谱峰值为0.66°2·s,TMD控制后功率谱峰值为0.47°2·s;在高频区域,TMD控制后的功率谱值显著小于无控制,但高频峰值均小于低频峰值。对于横摇运动,风机平台添加TMD前后响应幅度分别为-0.26°~0.25°和-0.07°~0.08°,标准差分别为0.05°和0.02°,抑制率达到62.79%;对于横摇功率谱,在低频0.1Hz附近,TMD控制前后功率谱峰值分别为0.02°2·s和0.002°2·s,其减小程度大于高频区域。在高频0.5Hz附近,控制前后横摇功率谱峰值从7.6×10-5°2·s减小至3.8×10-5°2·s。在其他频率上TMD控制下的横摇谱值和无控制时相近或更大。

(a) 平台纵摇时历曲线
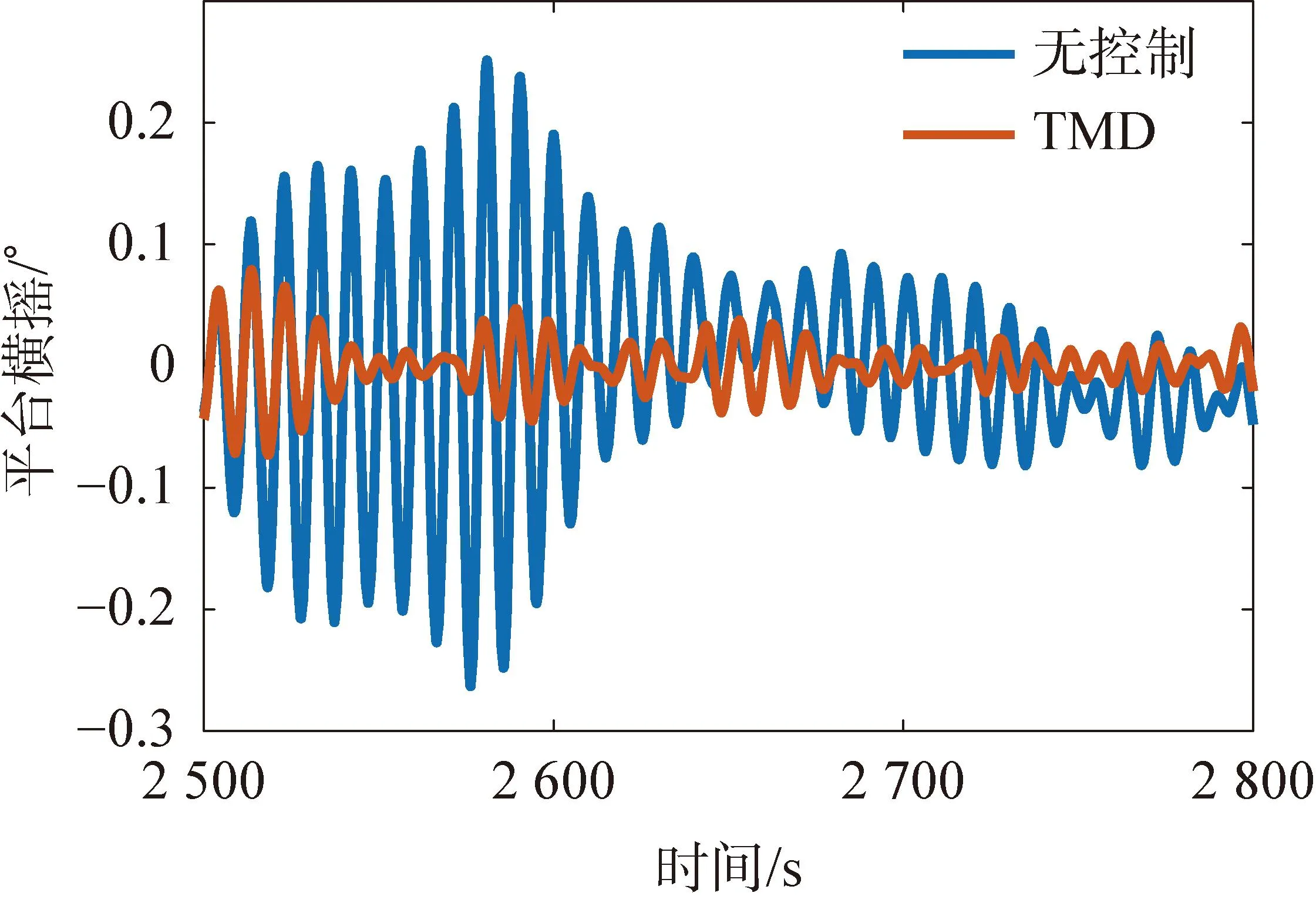
(b) 平台横摇时历曲线
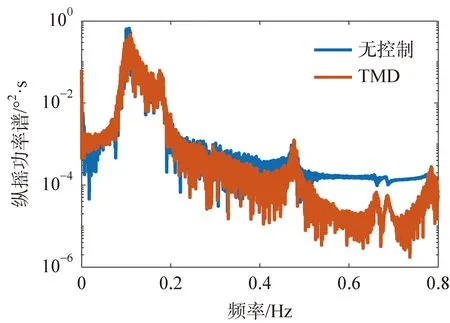
(c) 平台纵摇功率谱

(d) 平台横摇功率谱图8 平台纵摇、横摇响应时历曲线和功率谱Fig.8 Platform pitch and roll response time history curves and power spectrum
4.3 塔基弯矩
图9所示为风机塔基弯矩的时程曲线。平台TMD控制后风机塔基弯矩均有减小。对于塔基前后弯矩,TMD控制前后范围分别在-169.78~176.82kN·m和-138.23~136.21kN·m,标准差分别为72.3kN·m和61.0kN·m,减小幅度达到15.62%;对于塔基左右弯矩,TMD控制前后范围在-11.5~10.4kN·m和-5.3~4.5kN·m,标准差2.10kN·m和1.26kN·m,抑制效果达到39.8%。
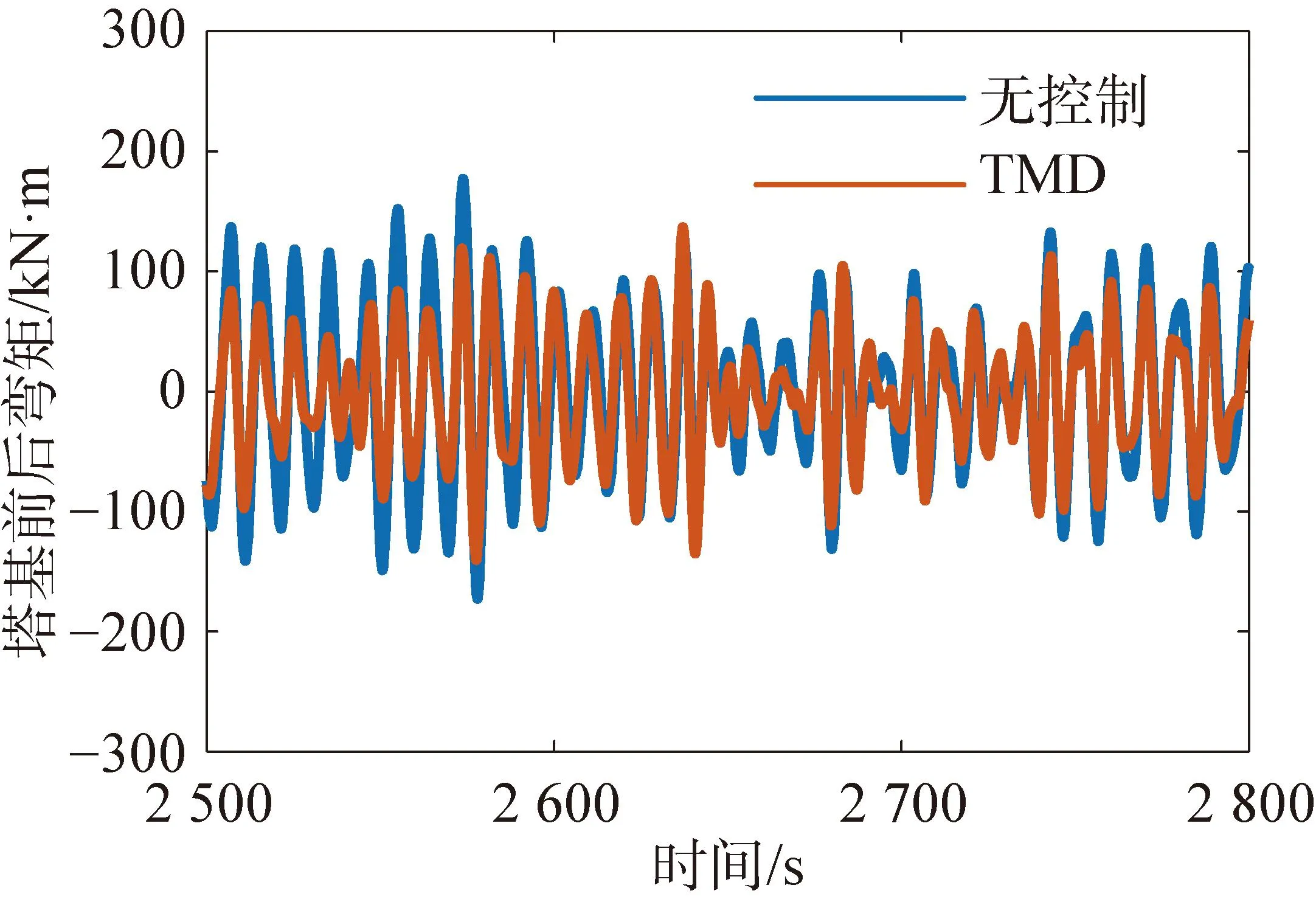
(a) 塔基前后弯矩
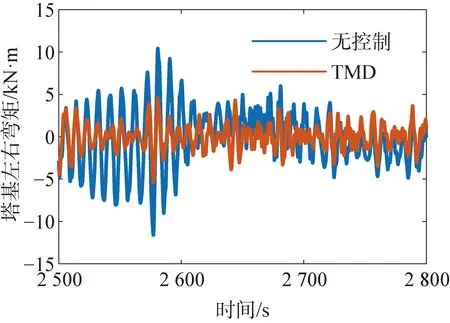
(b) 塔基左右弯矩图9 塔基弯矩时程曲线Fig.9 Bending moment time history curve of the tower base
5 结 论
本文基于ITI Barge浮式风机提出新型Barge浮式风机基础设计概念,以该新型Barge浮式风机为研究对象,通过在平台内配置不同位置、质量、阻尼比的TMD,比较TMD对该风机纵摇运动的控制效果并选取最优TMD参数。在此基础上,研究风浪载荷作用下该新型Barge风机平台添加TMD控制前后的运动响应变化。得出结论如下:
(1) TMD在平台内位置越高,浮式风机平台纵摇响应越小,TMD位于距风机平台底部10m时,纵摇运动减小21.36%。
(2) 浮式风机平台纵摇响应同样随平台TMD质量比变大而变小。在质量比不超过3%的范围内,质量比为3%的TMD对平台纵摇的控制效果最明显;风机平台纵摇抑制率随平台TMD阻尼比呈非线性变化规律,TMD阻尼比为5.8%时,平台纵摇减小幅度最大,抑制率接近23%。
(3) 对于新型Barge式浮式风机,在平台内浮筒顶部配置质量比为3%、阻尼比为6%的TMD后,风机塔顶前后和左右位移分别减小15.56%、 44.93%,大大减小机舱运动幅度;平台纵摇和横摇响应抑制率达到22.97%、 62.79%,平台纵摇和横摇自由度的稳定性显著提升;风机塔基前后和左右弯矩稳定性分别提高15.62%、 39.8%,塔架和平台连接处受力显著减小。
综合上述结论,针对Barge类浮式风机,为控制其在风浪载荷作用下的运动,在平台浮筒上部添加质量比为3%、阻尼比为6%的TMD,可以达到较为理想的抑制效果,对于工程实践中TMD的应用具有指导意义。