盘鼓混合式磁流变踏板力调控装置结构设计与优化
2024-01-13张金龙渠立红
屈 贤,张金龙,渠立红
(南京工业职业技术大学 交通工程学院,南京 210023,中国)
电动汽车的再生制动技术可将汽车制动时的动能回收再利用,是电动汽车节能增程的核心技术之一。但面对复杂的制动工况,电动汽车制动时需要进行再生制动与液压制动的制动力分配与切换控制,这使液压系统压力出现变化,导致踏板力及踏板行程波动等问题[1-3],严重影响制动安全性与操控舒适性。因此,解决制动踏板的力反馈调控问题已成为充分发挥再生制动技术优势的重要前提。
制动踏板模拟调控装置是保证制动踏板稳定舒适的关键,国内外专家学者对此展开了大量而深入的研究[4-9]。陈燎等[5]提出了可以反馈踏板感觉的踏板模拟机构,利用液压行程模拟器模拟踏板力与踏板行程的关系;刘宏伟等[7]则在踏板感觉模拟器回路中设计了一种液压先导阀,以提高系统通流能力和踏板速度响应。S. E. Asanov[10]设计和开发了基于电驱动的踏板主动反馈模拟装置。C. Umut[11]和K. Kenta[12]都利用电机进行踏板力补偿控制,取得了良好的制动踏板感觉。M. Sutapa[13]则使用电磁装置进行再生制动踏板稳定性的控制研究,以提升再生制动性能。由以上研究可知,当前制动踏板模拟调控装置主要可分为2 类:1) 采用液压调控,具有控制简单,体积小的优点;2) 采用机电调控,具有响应快,调控灵活的优点。这两类踏板模拟调控装置极大改善了制动踏板感觉,但需要对汽车制动系统结构进行较大改动。
随着智能材料技术的发展,制动踏板模拟调控装置研究发生了新变化。磁流变液具有响应快、能耗低、控制方便、具有失效保护性等优点[14-15],十分契合于制动踏板感觉的模拟调控需求。王道明等[16]设计了一个圆盘式磁流变阻尼器用于再生制动踏板感觉控制,实验测试表明,磁流变阻尼器能有效改善制动踏板感觉。除此之外,还有研究将磁流变技术用于汽车转向力反馈[17-18]、遥感操纵机构[19]等装置,都取得了不错的力反馈调节效果。
因此,本文对能够嵌入安装于制动踏板根部的磁流变踏板力调控装置的结构设计与优化展开研究,运用有限元方法优化装置的磁路结构,在满足体积嵌入安装需求下,使装置的输出力矩最大化。同时,对样机进行性能测试试验,依据所设计的磁流变踏板力调控装置的性能测试结果,分析装置用于调控踏板反馈的理论可行性。
1 磁流变踏板力调控工作原理与结构设计
1.1 磁流变踏板力调控工作原理
设计的磁流变踏板力调控装置的安装位置及工作原理如图1 所示。从图1a 中可见,磁流变踏板力调节装置位于制动踏板根部,其输出轴与踏板转轴固定连接,随踏板旋转,磁流变踏板力调节装置的壳体固定在踏板支座上,保持静止不动。由图1b 可知,制动时,汽车根据制动工况进行制动分配控制,再生制动开启,液压制动系统压力会协同减小以保持正常的制动力不变,由此造成踏板力减小,此时增大磁流变踏板力调控装置的力矩输出,补偿减小的踏板力;当制动工况需要再生制动退出时,需要增加液压制动系统压力以维持或增加制动力,导致踏板力增加,此时减小磁流变踏板力调控装置的力矩输出,抵消增加的踏板力,最终实现制动踏板力恢复到期望值,实现踏板感觉的稳定调控。

图1 磁流变踏板力调控装置的安装示意图与基本工作原理
1.2 磁流变踏板力调节装置结构设计
由图1a 可知,本文提出的磁流变踏板力调控装置是一个可嵌入安装的附件,不介入汽车原有制动系统中,不影响原制动系统的制动控制,结合磁流变装置固有的失效保护特性,应用磁流变踏板力调控装置进行踏板力调控具有良好的安全性。为实现装置的嵌入安装,需具有较为紧凑的结构设计,保证装置的体积足够小。本文采用了线圈内置的混合式磁流变踏板力调控装置结构设计,充分应用装置的盘式间隙与鼓式间隙,以增大装置的力矩密度,具体如图2 所示。

图2 磁流变踏板力调控装置结构图
由图2 可知,本文设计的磁流变踏板力调控装置的线圈缠绕在转子内环上,可以省去线圈毂,使结构更加紧凑。为提高线圈上下侧磁路中的磁场通过性,线圈截面设置为梯形。转子由内环与外环构成,中间采用隔磁环隔开,同时定子中间也设置有隔磁环,使磁场能有效穿过磁流变液间隙,形成综合利用盘式间隙与鼓式间隙的混合式磁流变踏板力调节装置结构,实现最大化的磁流变液利用效率。
为使磁流变踏板力调节装置的磁路结构更合理,需要确定磁路结构具体尺寸。图3 为磁流变踏板力调控装置需优化的磁路关键尺寸,其主要包括径向尺寸r1~r5,轴向尺寸l、ld、lc,磁流变液间隙h,隔磁间隙hc及角度α。

图3 磁流变踏板力调控装置关键尺寸
1.3 磁流变踏板力调控装置力矩模型
为满足制动踏板力调控需求,需考虑磁流变踏板力调控装置的力矩输出。结构优化前,需构建磁流变踏板力调控装置的力矩模型,用于优化力矩计算。本文提出的磁流变踏板力调控装置采用盘鼓混合式结构设计,因此,需分别构建盘式工作间隙与鼓式工作间隙的力矩模型。
1.3.1 盘式结构力矩模型
图4a 为磁流变液盘式工作间隙的基本结构。其中,转子绕旋转轴旋转,转速为ω,定子保持固定不动,转子与定子间形成相对旋转运动,剪切转子与定子间的磁流变液,磁流变液反作用于转子,产生阻碍转子运动的力矩,并由转轴向外输出。

图4 磁流变液工作间隙示意图
盘式工作间隙的输出力矩可由磁流变液作用于转子上的应力对作用面积的积分得到,即
其中:Td为盘式磁流变液工作间隙产生的力矩;rw和rn分别为磁流变液工作间隙的内半径与外半径;τz0为磁流变液作用在转子表面的剪切应力;r表示径向坐标。
由磁流变液的Bingham 本构模型可知[20],磁流变液在磁场中的剪切应力可表示为
其中:τ为磁流变液剪切应力;τy(B)为磁流变液在磁场下的屈服应力,其大小由磁流变液特性与磁感强度B决定;η为磁流变液的零场粘度;γ为磁流变液的剪切应变率。考虑磁流变液工作间隙的厚度h通常较小(本文中按照设计经验,h取1 mm),作用在转子表面的剪切应力可近似按照平均值进行计算,磁流变液的剪切应变率可表示为
结合式(1)—(3),磁流变踏板力调控装置盘式工作间隙产生的力矩为
1.3.2 鼓式结构力矩模型分析
图4b 为磁流变液鼓式工作间隙的截面示意图。工作时,转子转速为ω,定子保持不动,转子柱面与定子柱面产生相对旋转运动,使工作间隙内的磁流变液受切向剪切作用,产生阻碍转子旋转的力矩。
磁流变液鼓式工作间隙产生的力矩可以写作
其中:Tc为鼓式磁流变液工作间隙产生的力矩,lt为转子柱面的高度,rc1为转子柱面的半径,τc0为作用在转子柱面上的应力。τc0可近似以间歇内的平均磁感强度计算,而鼓式工作间隙的磁流变液的剪切率可表示为
其中,ω(r)为磁流变液的转速,可以通过流体动力学N-S方程计算得到[20],即:
由图3 的结构设计可知,本文所设计的磁流变踏板力调控装置包含2 个盘式间歇和1 个鼓式间隙,结合式(4)和式(8),装置输出力矩表达式可以写作
其中:rs为盘面间隙隔磁尺寸,ld为转子的厚度,lc为柱面间隙隔磁尺寸。由式(9)可知,当磁流变踏板力调节装置的结构设计完成后,其输出力矩取决于磁流变液的屈服应力τy和转速ω,其中τy由通过磁流变液的磁场大小决定,式(9)中的第1 项可称为磁致力矩;转速ω影响磁流变液的剪切应变力,其产生的力矩与磁流变液的零场粘度有关,式(9)中的第2 项可称为粘致力矩。
2 磁流变踏板力调节装置结构优化
利用有限元软件对磁流变踏板力调节装置的磁路进行仿真优化计算,图5 为磁路优化的基本流程。其基本过程是:首先依据初始结构参数构建模型并定义材料属性,随后设定边界条件与载荷,再进行电磁迭代求解与磁路特性参数计算分析;在此基础上设定优化目标与约束,制定优化算法计算,直至收敛,得出最优化尺寸参数。

图5 磁流变踏板力调节装置磁路优化过程
2.1 装置材料的选用
磁流变液是磁流变踏板力调控装置的核心材料,性能良好且稳定的磁流变液是踏板力调控装置设计的技术基础。本研究中,考虑磁流变液的性能需求与价格因素,选用博海新材料的MRF-181 型磁流变液,其基础性能指标如表1 所示。

表1 MRF-181 型磁流变液基础性能
图6 为MRF-181 型磁流变液的B-H曲线和τ-B曲线,显示了该型号磁流变液的磁化性能与屈服特性。由图6a 可知,在磁场强度H小于160 kA/m 时,磁流变液具有较为线性的导磁特性;由图6b 可知,磁流变液的屈服应力随磁感强度B增大而增加,变化速率先增加或减小。

图6 MRF-181 型磁流变液特性曲线
根据τ-B曲线上的数据点,并参考文献[21],采用三次多项式进行数据拟合,拟合结果的确定系数(R-square)值为0.999 9,均方根为0.208 5 kPa,这表明:采用三次多项式拟合得到的表达式能较好的反映磁流变液屈服应力随磁感强度的变化关系,具体可写为
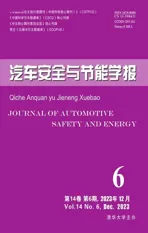
铁磁材料是磁流变踏板力调节装置的关键材料,选用时应着重考虑材料的饱和磁感强度和矫顽力。在常见的铁磁材料中,电工纯铁具有较高的饱和磁感强度,较小的矫顽力,且加工方便,成本较低。因此,设计中选择电工纯铁DT4C 作为磁流变踏板力调控装置的铁磁材料,其B-H曲线如图7 所示。由图7 可知,电工纯铁DT4C 在磁场强度10 kA/m 附近有一处明显拐点,此处的磁感强度值即为电工纯铁DT4C 的饱和磁感强度。考虑拐点处的磁场强度相对较小,参考文献[21]中的取值,以磁感强度1.9T 为饱和磁感强度进行仿真分析。
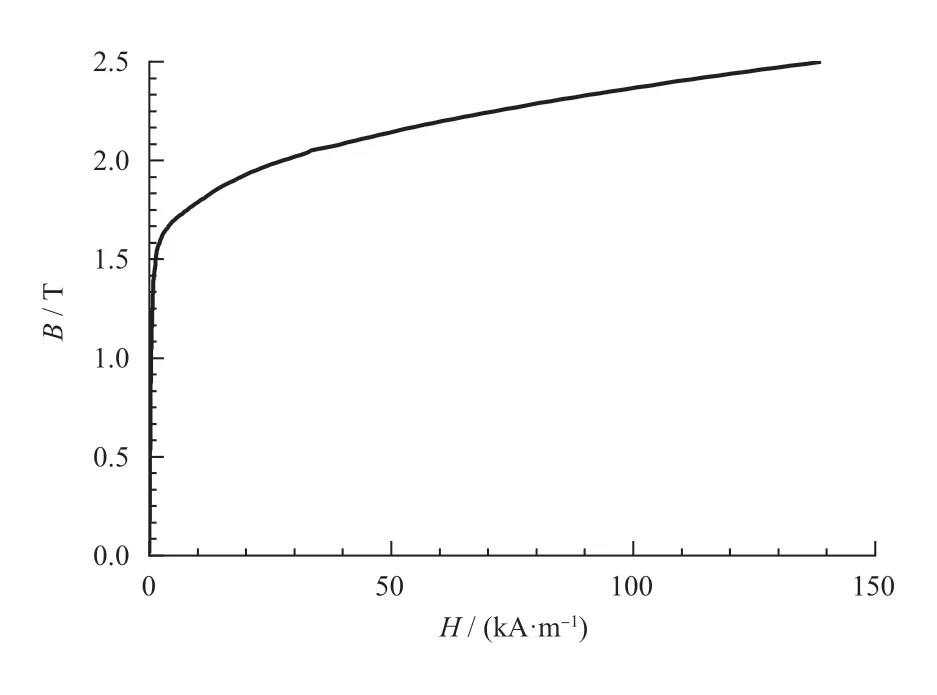
图7 电工纯铁DT4C B-H 曲线
2.2 磁流变踏板力调节装置优化结构分析
根据磁流变踏板力调节装置的安装位置及相关设计经验,可初步确定磁流变踏板力调控装置的初始结构尺寸,构建有限元分析模型,并基于选定的磁流变液及铁磁材料,进行优化仿真。
图3 中显示了磁流变踏板力调控装置的关键结构尺寸,其中r1为轴承外圈半径,轴承为标准件,选定轴承后,该尺寸不会改变;按照设计经验,隔磁尺寸设置为磁流变间隙厚度的5 倍,磁流变液间隙厚度设定为1 mm,α角度设为3°[21];其余尺寸则通过优化得出。本文采用ANSYS 软件中的一阶优化算法进行设计优化,在考虑基本尺寸及磁感强度约束下,以磁流变踏板力调节装置输出最大力矩为目标进行优化,具体优化表达式为
服从于
其中:rp和lp为制动踏板根部空间能容纳的最大半径与轴向厚度,Bmax为磁流变踏板力调控装置的最大磁感强度,Bsat为铁磁体饱和磁感强度。本文中,rp和lp的值分别取65 mm 和40 mm,Bsat的值取1.9 T。尺寸优化过程及结果如图8及表2所示。图8中,L表示结构尺寸,N表示迭代次数,T表示输出力矩。

图8 磁流变踏板力调节装置优化迭代过程
由图8 可知,在优化迭代过程中,磁流变踏板力调节装置的关键尺寸总体呈现减小趋势,其中,r3~r5尺寸减小较为明显,减小量分别达15.74%、14.55%和14.62%。r2和l尺寸略有增大,这主要是为了磁路中的磁饱和约束。磁流变踏板力调控装置的输出力矩呈现波动上升的趋势。结合表2 可知,优化迭代后,磁流变踏板力调控装置的输出力矩增加到25.4 Nm。
图9 为磁流变踏板力调控装置优化结构的磁路分布特性图,由图9a 可知,装置内部的磁力线分布符合设计预期的磁路分布,且磁力线基本能够垂直穿过磁流变液工作间隙,满足磁流变踏板力调控装置的工作需求。由图9b 可知,优化后,磁流变踏板力调控装置的最大磁感强度为1.88 T,满足设计要求(小于饱和值1.9 T),且磁流变踏板力调节装置的转子内环和外环的磁感强度都较大,表明该部分材料铁磁性能得到了充分利用。定子上的磁感强度稍小,主要区域磁感强度都大于1 T,最大值达到了1.26 T 以上,考虑装配需要及磁场饱和约束需求,定子的尺寸也相对合理。磁流变液间隙部分,靠近转轴内侧处的磁感强度较大,达到了0.57 T,这主要是由于大部分磁场需在此汇聚;其余部分的磁感强度分布则较为均匀,较符合磁流变踏板力调控装置的磁路设计要求。因此,磁流变踏板力调节装置的优化结果较为合理。

图9 磁流变踏板力调节装置优化结构的磁路分布特性图
3 磁流变踏板力调节装置样机测试分析
根据磁路有限元优化结果,进行磁流变踏板力调控装置结构设计。图10 为磁流变踏板力调控装置的装配图及实物样机图。由图10a 可知,转子内环、线圈、转子隔磁环及转子外环组成转子部件;左壳体、壳体隔磁环及右壳体组成壳体部件;壳体部件与转子部件之间留有磁流变液间隙,并可以通过左壳体上设置的注液孔加注磁流变液。图10b 为磁流变踏板力调节装置样机安装图,磁流变踏板力调节装置的输出轴与踏板根部旋转轴固定连接,随踏板旋转而转动;装置的壳体固定于踏板支座上,保持固定不定。工作时,通过调节线圈电流大小,改变磁流变踏板力调节装置的输出力矩,实现制动踏板力调节。

图10 磁流变踏板力调节装置设计图与样机
为验证磁流变踏板力调控装置的踏板力调节能力,对装置进行输出力矩测试,图11 为磁流变踏板力调控装置力矩输出测试台架,电机采用永磁同步电机,功率750 W,最大输出力矩0~2.5 Nm,最大转速3 000 r / min;减速器速比为1:20;扭矩传感器采用北京海博华HCNJ-101 型转速、扭矩双通道输出传感器,力矩测量范围为0~50 Nm,测量精度为0.3%;磁流变踏板力调控装置采用兆信可调双路正负直流稳压电源,最大输出电压32 V,最大输出电流5 A,电流调控精度为10 mA。测试时,调节电机转速,测量不同转速与电流下,磁流变踏板力调控装置的输出力矩。
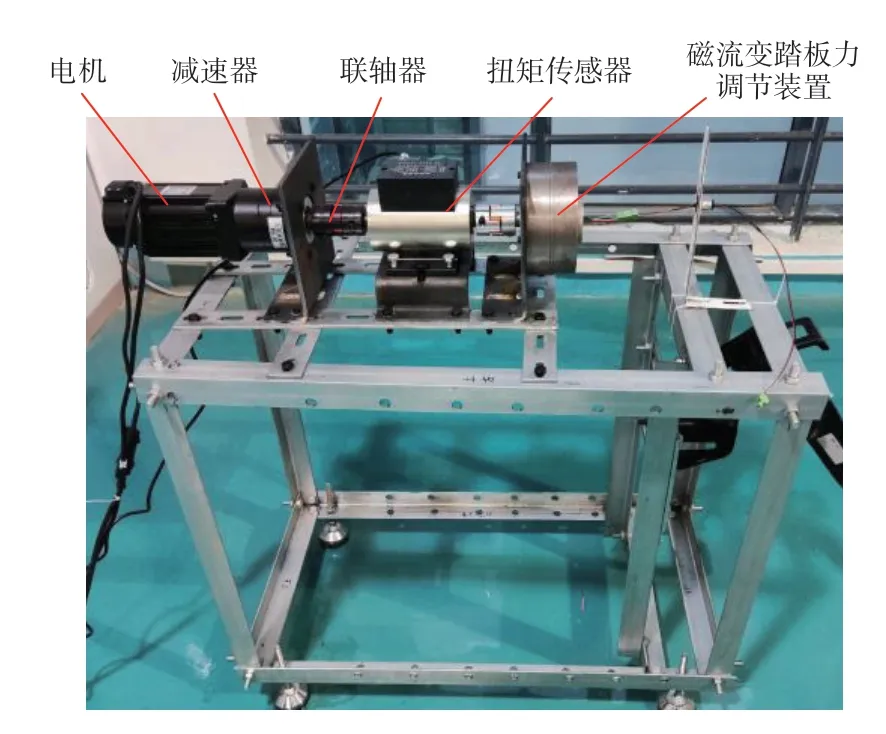
图11 磁流变踏板力调节装置力矩输出测试台架
图12 为磁流变踏板力调控装置输出力矩对电流变化的关系曲线。由图12 可知,在不同的转速下,磁流变踏板力调控装置的输出力矩都随着电流增加而增加,无电流时,各转速下的输出力矩为0.2 Nm 左右;1.6 A 时,各转速下的输出力矩都在30 Nm 以上,最大力矩约为32 Nm,这表明所设计的磁流变踏板力调控装置具有较大的力矩调节范围,参考文献[14]的踏板力调控研究,该力矩范围能较好的满足踏板力调控需求。而最大力矩大于仿真计算值则主要是因为加工装配误差,使磁流变液间隙的实际尺寸略小于1 mm。同时,由图还可知,各转速下的力矩输出包含2 条曲线,其中,下部的曲线是电流增加时的力矩输出曲线,上部的曲线是电流减小时的力矩曲线。相同电流下,上下曲线之间的差值最大约4 Nm,且上下曲线形成一个滞回环,这主要是由于磁性材料的矫顽力使磁场变化滞后于电流的变化,其可以在后续的控制研究中通过控制算法来消除影响。

图12 磁流变踏板力调节装置输出力矩对电流的变化曲线
图13 为磁流变踏板力调节装置输出力矩对转速的变化曲线。由图可知,随转速的增加,装置的输出力矩变化较小,这主要是装置尺寸较小,使装置的粘致力矩远小于磁致力矩。由于输出力矩受转速影响小,后续控制时,可以忽略转速的影响,只考虑对电流的控制,这将极大简化磁流变踏板力调控装置的力矩输出控制。同时,还可见,随着电流的增加,力矩曲线之间的间隙逐渐减小,其主要因为装置内部的磁场随着电流的增加逐渐趋于饱和,这与仿真优化的磁路分析结果一致,表明本文提出的设计优化具有较高准确性。
图13 磁流变踏板力调节装置输出力矩对转速的变化曲线
4 结 论
本文针对电动汽车的再生制动踏板力稳定性调控问题,提出一种嵌入安装于制动踏板根部的磁流变踏板力调控装置,利用有限元分析方法优化装置,基于优化结果,设计并加工磁流变踏板力调控装置样机,并完成了样机力矩输出性能测试,分析了磁流变踏板力调控装置用于电动汽车踏板力调控的可行性。
具体的优化设计与实验测试结果可归纳为:
1) 通过对盘-鼓混合式磁流变踏板力调控装置的磁路进行优化设计,使装置内部的磁路分析更合理,结构更紧凑,实现了磁流变踏板力调控装置的嵌入式安装。
2) 通过磁流变踏板力调控装置输出力矩对电流的测试,装置在0~1.6 A 电流下的最大输出力矩范围达到0.2~32.0 Nm,具有较为宽广的力矩可调范围和良好的力矩可调性能,能满足踏板力调控需求。
3) 通过磁流变踏板力调节装置输出力矩对转速的测试,装置的输出力矩受转速的影响较小,可忽略不计,这有利于简化磁流变踏板力调节装置调控踏板力的控制算法。