视觉障碍下十字路口电动两轮车事故特征和典型场景分析
2024-01-13石金明张悦苁
韩 勇 ,孟 昕,潘 迪 ,吴 贺,石金明,张悦苁
(1. 厦门理工学院 机械与汽车工程学院,厦门361024,中国;2. 福建省客车先进设计与制造重点实验室,厦门361024,中国;3. 厦门大学 航空航天学院,厦门 361024,中国)
公安部道路交通管理局统计数据显示,2019年中国大陆共发生21 713 起电动两轮车(electric twowheeler,ETW)事故,造成8 639人死亡[1]。电动两轮车作为中国广泛使用的交通工具,具有灵活、体积小、易操作等特点[2],研究汽车与电动两轮车碰撞场景,对避免该类事故发生具有重要意义。
学者们针对电动两轮车事故场景已进行了大量研究,为测试场景的制定和骑车人安全防护起到一定促进作用。CATS[3-5](Cyclist-AEB Testing System) 项目通过对欧洲真实碰撞数据开展描述性统计分析,开发了两轮车自动制动系统的测试场景,但场景难以适用于中国的道路环境。范天赐等[2]通过对比欧洲两轮车测试场景,提取出了适用于中国大陆的两轮车典型场景。SUI Bo 等[6-7]基于中国深度事故研究数据(China Accident in-depth Study Program,CIDAS),采用聚类分析方法提取了典型场景,但由于缺乏事故视频等关键信息,导致分析速度时仅采用限速标志上的数据,从而得到的电动两轮车事故测试场景存在明显不足。PAN Di 等[8]基于道路弱势群体交通事故数据库(VRU TRaffic Accident database with Video, VRU-TRAVi)中的630 例具有视频信息的电动两轮车事故,估算了碰撞速度范围并考虑了视觉障碍,提取了有视觉障碍的典型场景,丰富了电动两轮车的自动紧急制动(autonomous emergency braking,AEB) 测试场景,但对视觉障碍事故的详细特征缺乏深入分析。D. Ito 等[9-10]进一步分析了视觉障碍情况下的碰撞时间(time to collision,TTC)阈值,发现当TTC < 1.2 s 时,驾驶员采取避撞措施也无法避免事故的发生。金钱钱等[11]分析了有无视觉障碍场景下的TTC,得出了有视觉障碍事故的TTC 比无视觉障碍的TTC 减少0.15~0.25 s。上述学者对视觉障碍的研究虽有所涉及,但仍缺少对电动两轮车视觉障碍场景下事故特征的具体分析。
此外,相较于直行道路,汽车与电动两轮车在十字路口和交叉路口更易发生事故[12]。然而,上述研究均未考虑十字路口特定场景下的视觉障碍。由于在十字路口处的绿化带、建筑物以及等待车辆较多而形成了诸多种类的视觉盲区,导致在十字路口处事故占比更多[13-14]。因此。本文对道路弱势群体交通事故(VRUTRAVi)数据库中带有视频信息的510 例电动两轮车事故案例进行梳理,对十字路口处的障碍物类型、事故场景和车辆违规等情况进行分析总结,得出汽车与电动两轮车典型碰撞场景,为视觉障碍场景下的汽车主动安全技术研究提供理论基础和参考依据。
1 研究方法
1.1 数据样本
本文所用的案例来源于VRU-TRAVi 数据库[8,15]。事故视频筛选原则如下:1) 事故为交通意外,而非人为因素; 2) 视频播放流畅,帧率正常,无倍速处理; 3) 视频清晰,能清晰地展示直观道路信息和视觉障碍情况。最终,从VRU-TRAVi 数据库的1 482 例汽车与电动两轮车的碰撞事故中筛选了510 例在十字路口视觉障碍场景下的电动两轮车事故。
1.2 交通违规情况及场景统计
根据PAN Di 等[8,16]对VRU-TRAVi 数据库中的汽车与电动两轮车典型场景的聚类分析结果,将视觉障碍物类型划分为固定障碍物、可移动障碍物。在本研究中,由于可移动障碍物事故案例较多,进一步将障碍物出现的位置细分为相邻车道和非相邻车道。同时,针对交通违规多发的情况,对汽车和电动两轮车的违规情况(无信号灯路口超速行驶、闯红灯、逆行及其他)进行了统计分析。
1.3 速度和距离估算方法
速度和距离的估算方法主要有传统的交通事故技术分析法[17]、直接线性变换理论[11]和逐帧分析法[18],传统的交通事故技术分析法的计算结果误差较大,多用于估算无视频的事故车速信息。本文采用直接线性变换理论和逐帧分析法分别对汽车和电动两轮车之间距离和碰撞速度进行估计[18],其中用到的坐标系转换如图1 所示。

图1 坐标系转换示意图
图1 为某十字路口处视觉障碍场景下的电动两轮车碰撞事故案例的第127 帧时刻的位置图,以O点为物方坐标原点建立坐标系。通过O、A、B、C等4 点的实际坐标(X,Y)和像素坐标(u,v),求解出坐标转化系数l1,l2,…,l8,进而得出物方坐标与像素坐标的转换关系式(1)和式(2)。
1.4 TTC 估算方法
D. Ito 等[9]通过行车记录仪采集到的车辆信息,对障碍物后面的骑车人出现在视线范围内的时刻和该时刻下的人-车相对距离计算碰撞时间(TTC)值。本研究参考此方法,将电动两轮车(ETW)首次出现在汽车的探测范围定义为初始时刻,且不考虑传感器探测范围视场角(field of view,FOV)的影响[19],采用直接线性变换理论计算该时刻下汽车速度以及汽车和ETW的相对距离,进而计算得出TTC。
如图2 所示,定义汽车在纵向行驶方向上到达轨迹交叉点的时间为TTCx,即纵向碰撞时间,ETW 在横向行驶方向上到达轨迹交叉点的时间为TTCy,即横向碰撞时间。计算式分别为:

图2 场景模型
其中:vcar、vETW为汽车探测到ETW 时二者的瞬时速度,L为汽车探测到ETW 时二者的相对距离,θ为汽车与ETW 之间的方位角。
本研究中采用TTCx值作为TTC 值[20]:
2 结果及分析
2.1 交通违规及视觉障碍场景统计
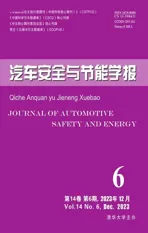
根据事故视频信息,统计了十字路口处由视觉障碍引发的汽车和ETW 的交通违规情况[21](见图3)。510起事故案例中,有382 起事故涉及到ETW 闯红灯,有38 起涉及汽车闯红灯,抢/闯红灯行为在所筛选出的事故视频中占比合计86%;25 起事故为十字路口处无交通信号灯的超速行驶(占5%);16 起事故涉及车辆逆行(占3%);28 起交通事故为其他违反交通规则的情况(占6%)。由此可以得出闯红灯是造成十字路口障碍物场景下事故发生的重要因素之一。
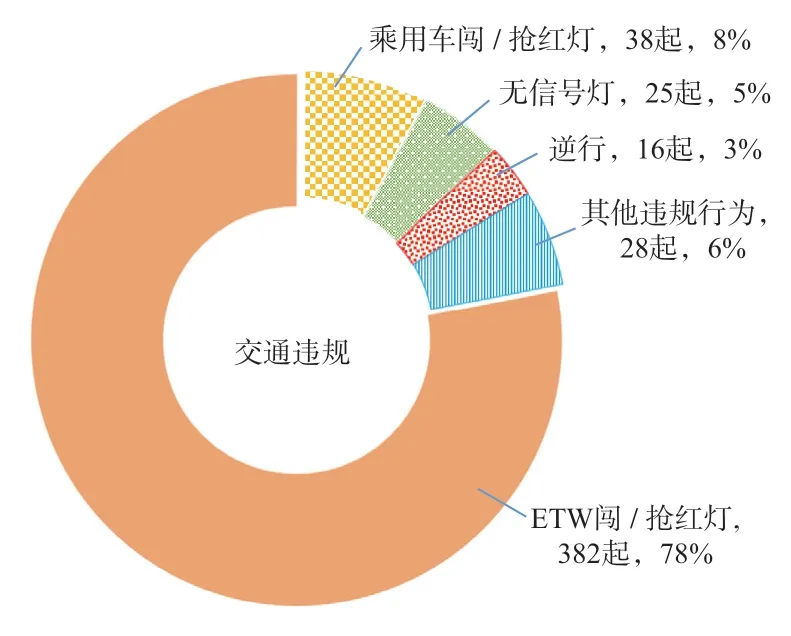
图3 交通违规类型
在实际交通事故中,障碍物种类繁多,对事故产生较大影响[22]。通过对筛选出的事故视频分析,得出障碍物种类主要包括固定的环境建筑物,等待、停泊或行驶中的车辆以及自车车身的盲区。依据障碍物类型将视觉障碍场景分为固定障碍物和可移动障碍物场景。在可移动障碍物场景中,可进一步细分为邻道车辆和非邻道车辆视觉障碍场景,得出了如图4 所示的5 种类型。

图4 视觉障碍场景类型
① 视觉障碍场景Ⅰ(immovable obstacle scenario,IMOS):十字路口处的固定障碍物阻碍了行驶汽车的视野,导致汽车与右侧直行而来的ETW 发生碰撞;
② 视觉障碍场景Ⅱ(movable obstacle in adjacent lane scenario-1,MOALS-1)为十字路处邻车道逆向行驶的车辆阻碍了汽车的视野,导致汽车与左侧直行而来的ETW 发生碰撞;
③ 视觉障碍场景Ⅲ(movable obstacle in adjacent lane scenario-2,MOALS-2):十字路口处同向邻车道等待启动的车辆阻碍了行驶汽车的视野,导致汽车与右侧直行而来的ETW 发生碰撞;
④ 视觉障碍场景Ⅳ(movable obstruction in adjacent lane Scenario-3,MOALS-3):十字路口处同向邻车道行驶中的车辆阻碍了汽车的视野,导致汽车与右侧直行而来的电动两轮车发生碰撞;
⑤ 视觉障碍场景Ⅴ(movable obstacle that is not adjacent lane scenario,MONALS):十字路口处非邻道的车辆阻碍了行驶汽车的视野,使汽车与左侧直行而来的ETW 发生碰撞。
2.2 不同场景下的碰撞速度分布
图5 所示为5 种视觉障碍场景下汽车与ETW速度分布情况,其中MOALS 场景包含MOALS-1、MOALS-2、MOALS-3 共3 种场景。
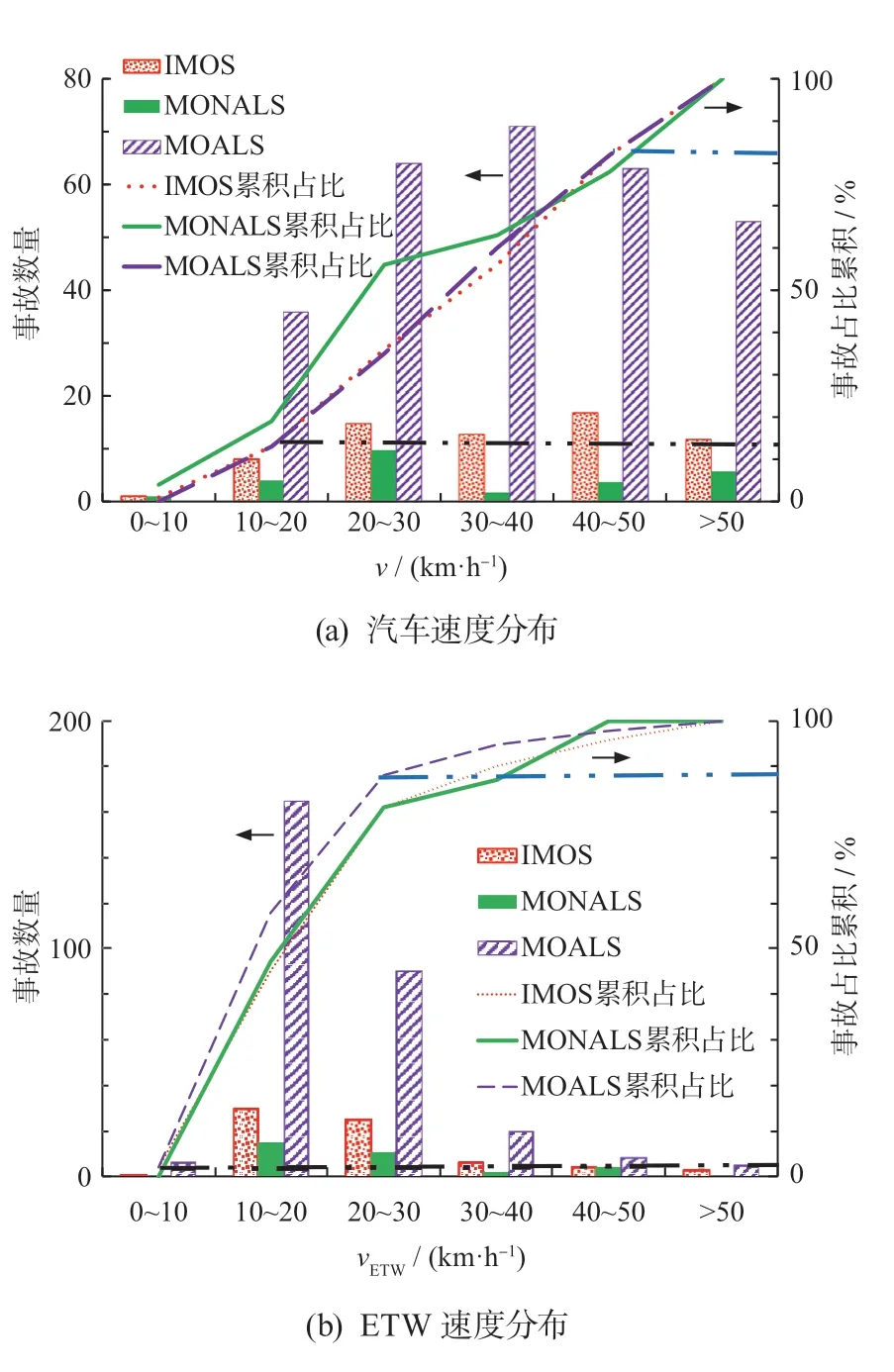
图5 汽车与ETW 速度分布
由图5a 可知,由相邻车道的车辆造成的视觉障碍场景(MOALS)而导致的事故案例较多。通过车速累积频率分布可知,在IMOS、MONALS 与MOALS 场景下的汽车碰撞速度范围主要分布在20~50 km/h, 其占比分别为68%、59%和66%(图中两虚线之间)。图5b所示为不同视觉障碍场景下的ETW 速度及累积分布情况。通过累积频率分布可知,ETW 的速度在IMOS、MONALS 与MOALS 场景下,主要分布在10~30 km/h,在此速度区间的占比分别为79%、81%和86%。
2.3 不同障碍物场景下的TTC 分布
图6 中显示了不同视觉障碍场景的95%置信区间中的TTC上限、下限及平均值分布。在IMOS 场景中,TTC 的均值为1.17 s。在MOALS 中的TTC 均值最小,主要由于ETW 从相邻车道的车辆后面驶出,二者横向相对距离较小导致的。另外,部分案例中的汽车与ETW 速度较快导致横向的TTCy较小。在MOALS-1场景中,TTC 的均值为1.02 s。在MOALS-2 场景中,TTC 的均值为0.96 s。在MOALS-3 场景中,TTC 的均值为0.90 s 。在MONALS 场景中,TTC 的均值为1.27 s,该场景下TTC 均值相比于其他视觉障碍场景更大,主要由于道路情况较为复杂(障碍物车辆行驶方向不唯一,位置以及速度多变,视线遮挡范围也存在多变性),驾驶员驾驶汽车时警惕性更高而反应时间短。此外,在MOALS-3 场景中,其TTC 的上下限范围较大(上限1.14 s,下限0.66 s),主要由于该场景为相邻车道下的行驶中车辆造成的视觉障碍,且速度差异较大而引起的。
图6 95%置信区间下的TTC 上限、下限及平均值分布
2.4 不同障碍物场景下紧急制动效率
考参PAN Di 等[23]的研究,将汽车制动减速度设为法规型0.9g和保守型0.5g两种,以分析不同障碍物场景下TTC 和汽车速度(TTC-v)之间的分布(图7)。在510 起有视觉障碍的汽车与ETW 事故案例中,由于自车视觉障碍和视频角度限制无法估算速度或TTC,有92 起事故未纳入制动效率分析。在剩余的418 起事故中,当制动减速度为0.5g时,仅有182 例碰撞事故可避撞,事故避免率为43%。当制动减速度为0.9g的紧急制动情况下,332 例可避免,86 例不可避免,避免率为79%。为了分析不可避免的原因,图8 统计了保守型制动减速度0.5g下无法避撞的236 例事故中碰前汽车与ETW 的相对位置分布情况。其中,95%的事故车辆与ETW 的横向相对距离小于10 m,69%的事故车辆与ETW 的纵向相对距离小于10 m。因此,汽车与ETW 的纵横向相对距离较小是导致事故不可避免的主要原因。
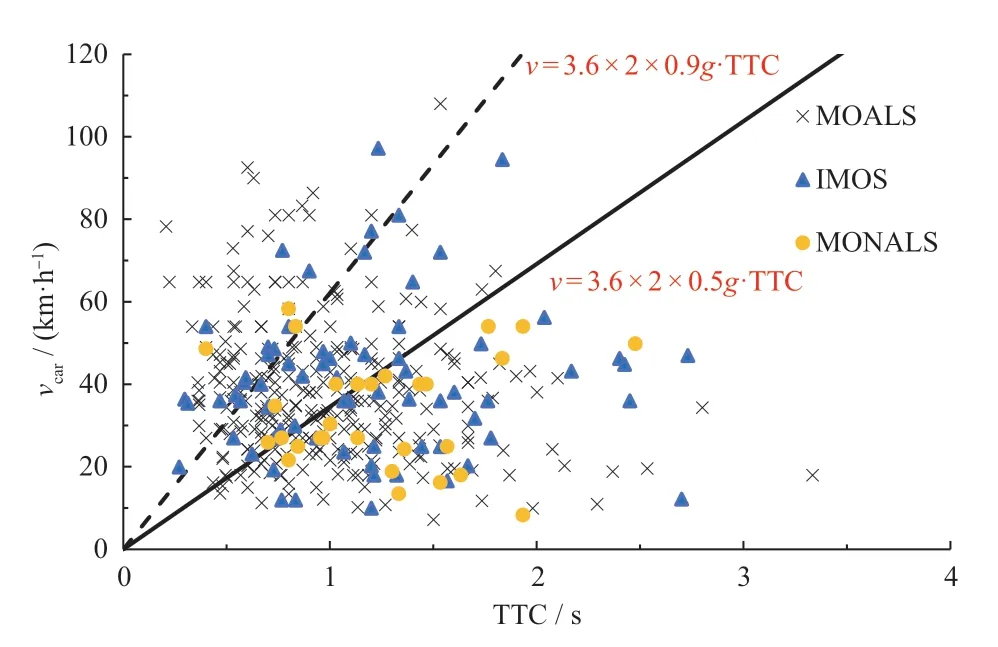
图7 TTC-v 分布及避撞情况
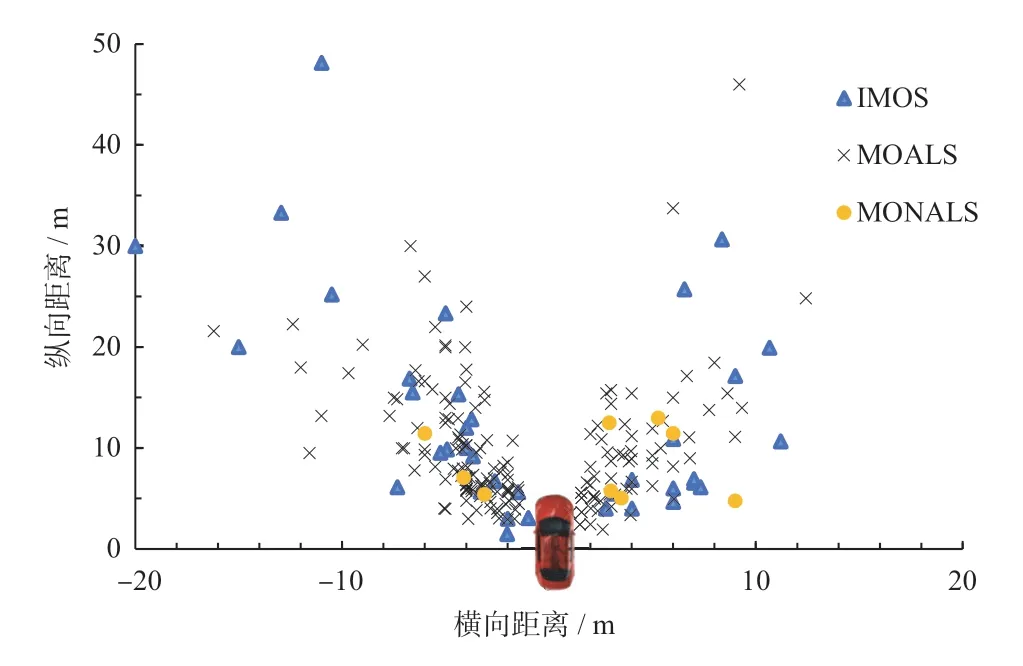
图8 AEB 无法避撞案例的电动两轮车位置分布
2.5 典型场景
结合前人[6,8]对典型场景的聚类结果,将Euro-NCAP 的自行车测试场景[24]与本研究归纳出的5 种存在视觉障碍的电动两轮车碰前事故场景(见图4)以及障碍物类型对比分析,发现MOALS-3 中对自车造成视觉障碍的行驶中的邻道车辆多为刚启动状态,与MOALS-2 场景类似,故MOALS-2 与MOALS-3 这2种场景合并重新命名为MOALS-S (movable obstacle in adjacent lane scenario-same direction,MOALS-S),并将MOALS-1 场景重新命名为MOALS-R (movable obstacle in adjacent lane scenario-right-about,MOALS-R),进而得出了4 种不同障碍物类型下的场景类型。
结合不同场景下的特征参数,最终得到图9 所示视觉障碍下十字路口处的4 种典型场景,全部发生在白天。图9a 为IMOS 典型场景,在该典型场景下,ETW 从固定障碍物后面驶出,与行驶汽车发生碰撞,汽车速度和ETW 速度范围分别为24~47 km/h 和15~27km/h;图9b 为MOALS-R 典型场景,在该典型场景下,ETW 从邻道车辆的左侧驶来,相邻车道与汽车行驶方向相反的车辆造成的视觉障碍,ETW 与行驶中的汽车发生碰撞,汽车速度和ETW 速度范围分别为27~46 km/h 和15~24 km/h;图9c 为MOALS-S典型场景,该典型场景下,ETW 从邻道车辆的右侧驶来,相邻车道与汽车同向行驶的车辆造成的视觉障碍,ETW 与行驶中的汽车发生碰撞,汽车速度和ETW 速度范围分别为27~46 km/h 和15~24 km/h;图9d 为MONALS 典型场景,ETW 从与汽车行驶方向垂直的停车等候车辆左边驶出,与行驶中的汽车发生碰撞,汽车速度和ETW 速度范围分别为18~45 km/h 和16~24 km/h。

图9 十字路口视觉障碍情况下的典型场景
3 讨 论
本研究所采用的事故视频均来源于VRU-TRAVi视频数据库,视频涵盖情况具有局限性,因此在筛选出的视频中,有部分视频无法对汽车以及ETW 的速度进行估算,其中包含36 起自车车身(如A 柱)造成的视觉障碍。同时,视频库中极少包含冰雪及恶劣环境路面的情况,筛选出的视频多为晴天和阴雨天,在图8中采用的0.9g和0.5g的制动减速度,未考虑冰雪等恶劣天气下的路面情况。
根据上述典型场景下的汽车与ETW 速度范围,开发者可根据IMOS、MOALS-R 和MOALS-S 等3 种场景将AEB 测试中的汽车速度范围设置在25~50 km/h,ETW速度设置在15~30 km/h。对MONALS 场景,汽车速度和ETW 速度分别设置在15~45 km/h 和15~25 km/h。同时,本文相较于前人的研究,增加了对碰撞速度和碰撞时间(TTC-v)的分析,在IMOS、MOALS-R、MOALS-S和MONALS 场景下的TTC 值范围分别为(1.12 s,1.22 s)、(0.88 s,1.16 s)、(0.92 s,1.0 s)和(1.02 s,1.52 s),可为视觉障碍下的汽车避撞系统,如AEB 的设计参数提供参考。
4 结 论
本文对十字路口处视觉障碍下的电动两轮车(ETW)视频事故进行了统计分析,对不同场景下的速度和TTC 进行了估算,并研究了十字路口处有视觉障碍情况下的场景类型,得到如下结论。
1) 通过对510 例事故视频的分析,汽车与ETW的速度分别集中在20~50 km/h 和10~30 km/h,且95%的碰撞事故均存在交通违规情况,其中86%的违规原因为抢/闯信号灯通过十字路口。
2) 研究得到了4 类存在视觉障碍的十字路口处典型场景,分别为固定障碍物场景(IMOS)、相邻车道同向行驶的可移动障碍物场景(MOALS-S)、相邻车道反向行驶的可移动障碍物场景(MOALS-R)、非相邻车道的可移动障碍物场景(MONALS),可覆盖84%的事故,具备良好的代表性。
3) 4 类场景下TTC 估算均值分别为1.12、1.02、0.96、1.27 s, 汽车速度范围分别为24~47 、27~46、27~46、18~45 km/h;电动两轮车速度范围分别为15~27、15~24、16~24 km/h。