基于水声传感器的高保真加密传输方法
2024-01-12李金平刘海龙
齐 娜,傅 巍,李金平,吕 颖,刘海龙
(中国电子科技集团公司第四十九研究所,黑龙江 哈尔滨 150028)
0 引 言
水下目标探测作为一种检测、定位、识别和跟踪的手段越来越受到各国海洋探测领域的关注。海上测量船具有机动性强、灵活性大、测量范围大等特点[1]。由于海洋资源的重要性,海洋上各种舰船目标的自动检测方法不断更新,对海洋目标检测意义重大。目标检测方法的解决思路主要是基于模板匹配、知识标识、图像分析及其学习等方法[2]。目前,通过声纳探测的方法也得到广泛应用。在海洋中通过声纳探测器收集的目标信息通常是通过无线传输形式输送给上位机进行信息处理。在报文传输过程中面临众多安全风险,极易被外来入侵设备截获。国内在水声探测领域大力发展探测技术,但对水声探测器的信息传输安全方面研究薄弱。如何快速安全地将承载的目标信息高效融合、加密是当前急需解决的问题,为海洋水声探测信息交换及传输工作创造稳定、可靠的环境。通常信息加密采用软件加密方式,但在海洋上软件加密方式需要的处理器相对复杂且加密速度慢,满足不了信息实时性及小型化要求。
目前,数据的隐私安全问题日益凸显,对于数据的保护意识及相关措施手段已提上日程[3~5]。用于数据加、解密的算法有许多,公用密钥(RSA)密码体质是一种模幂运算的加密体质,是唯一被广泛接受和应用的一种体质,本文结合现场可编程门阵列(field programmable gate array,FPGA )高速数字处理芯片为目标信息进行融合、加密、编码,为目标信息提供可靠、安全的传输环境[6,7]。本文提出了一种加密信息簇式高保真海上目标探测方法。利用高精度水声探测组件及FPGA高速数字处理器,结合RSA数字加密算法实现目标信息在海上可靠、安全的无线数字传输,并在数据终端通过界面显示。
1 相关理论
1.1 水声传感器的目标判别与定位
水声主被动定位系统的工作原理要求完成大量的互相关、自相关、快速傅里叶变换(FFT)、求互谱等运算[8]。信号处理原理框图如图1所示。
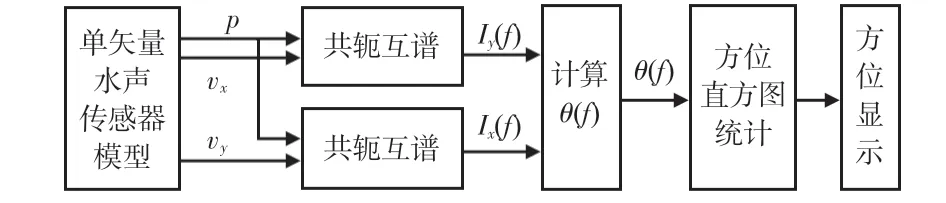
图1 信号处理框图
多功能水下浮标检测到目标信号后,利用直方图方位估计方法对目标信号进行方位估计(目标相对于水听器的方位θ)。直方图方位估计是一种统计方法,是在声压、振速共扼互谱的基础上对每一个频点进行方位估计,然后对所有频点的方位估计值进行直方图统计得到某一时刻的方位估计曲线,曲线最大值对应的方位即为目标方位估计值。单矢量水声传感器输出声压p(t)和振速vx(t),vy(t)信号,矢量平均声强值为
远场平面波的声压函数为[9~11]
对声压函数求微分得
该式为欧拉方程,对欧拉方程进行积分进而可求出振速函数为
式中 ρ为介质密度,ω为角频率,c 为角频率,k =ω/c 为波数,r为位置矢量,Δ为梯度运算。
对于平面波等声场环境下,声学欧姆定律有效,此时声压函数与振速函数的关系式为[12,13]
式中 x(t)为目标信号,np(t)为环境噪声干扰信号,θ为水平方位角。
另外,为了实现方位直方图统计,需要对每个频点进行方位估计,方位计算的表达式为
Iy(f)和Ix(f)为声强流谱由式(6)估计出的方位与频率f有关,不同频点处的方位估计值有所差别,宽带信号中如果存在周期性的强干扰或存在多目标的情况下,平均声强器无法得到目标的真实方位,只能测得合成声强流的方位,而且方位估计结果会偏向强度大的干扰(或强目标)方位。而用直方图统计的方法在单目标时可以将线谱或窄带强干扰抑制,在多目标中含线谱信号时可以区分多目标。直方图统计主要是进行各频点的方位估计值统计,如果以1°作为统计间隔,则可以表示为
式中 []为取整运算,某个频点f的方位估计值θ(f)转换为角度后取整得到k。φ为一个数组,用于存放一次方位估计中所有在[-180° 180°]中各个角度的频数,初始化时该数组为零,每得到1 个k 后,数组中对应角度的频数值φ(k)加1。最后统计结果即为方位估计结果[14,15]。
1.2 加、解密算法
加密算法采用非对称加密算法RSA,其加密端和解密端使用不同的密钥,并且解密端使用的密钥不能从加密端使用的密钥推导出,这样就使得密钥分发简单,而且存储的空间减少,这是由于需要保存的密钥量少[16]。本文将多组数据以信息排列的方式融合成单组数据串,并加密信息簇的方式转化成密文,加密算法采用非对称加密算法RSA,经过加密的数据串以密码报文的形式通过RS-485数据传输格式送出。RSA 加、解密算法原理框图如图2所示。
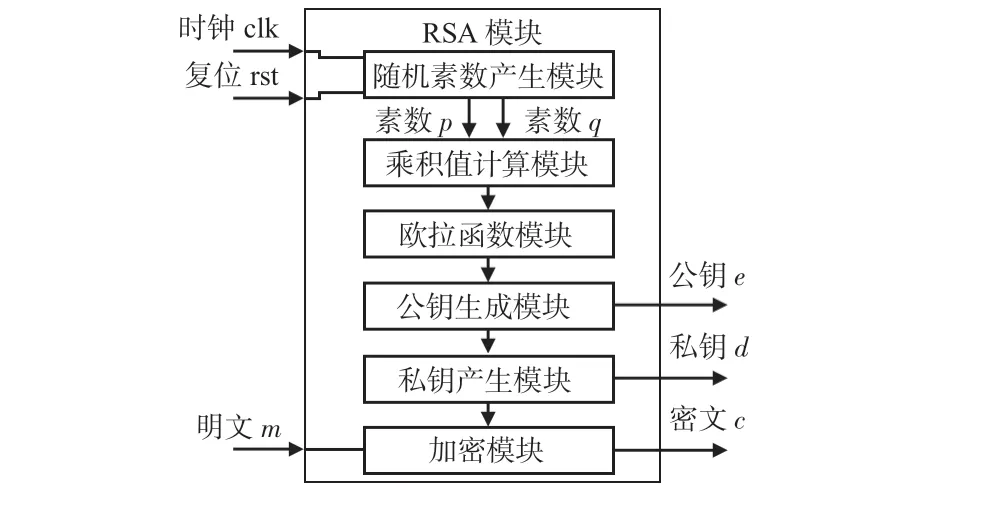
图2 加、解密原理框图
1.2.1 RSA加密初始化[17]
1)系统产生2个大素数p,q(保密);
2)计算n =p ×q(公开),欧拉函数φ(n)=(p -1)×(q-1)(保密);
3)随机选取整数e(公开)作为公钥,满足gcd(e,φ(n))=1;
4)计算解密密钥d(保密)作为私钥,满足e×d =1 mod(φ(n));也就是说d =e-1mod(φ(n)),销毁p,q,φ(n)。
1.2.2 RSA加、解密算法
1)首先将明文分块并数字化,每个数字化明文块的长度应不大于[log2n](算出二进制的最多位),然后对每个明文块m(0 <m <n)依次进行加密变换和解密变换;
2)加密变换:使用公钥e加密明文m,即c =memod(n);
3)解密变换:使用私钥d获得明文m,即m =cdmod(n)。
1.3 模幂算法
RSA加解密过程实际难点就是模幂运算的过程,为了达到足够的安全性,目前模数N至少为1 024 位,数据运算量大,因此,本文设计选择基2 的Montgomery 作为模幂的核心算法。基2的模幂算法描述主要为选取A,B,N,满足A <N,B <N,N <R =2n,gcd(N,2)=1
令S0=0,i从0至n-1循环
如果S0>N,那么Sn-N 为计算结果,否则Sn为计算结果[18]。
2 海上目标探测方法模型
深海区存在目标信号与海杂[19],目标信号在深海区经过预处理后的矢量水听器相互正交的2个方向的声信号信息vx,vy和声压水听器声压信号p(t)经过24 位高精度模/数(A/D)采集后进入综合处理器FPGA,多组承载着被测目标信息的数组进入FPGA 数字处理器完成信息的融合、加密、编码。首先,将多组以信息排列的方式融合成单组数据串并加密信息簇的方式转换成密文,加密算法采用非对称加密算法RSA,经过加密的数据串以密码报文的形式通过RS-485数据传输格式送出,在无线传输过程确保信息的安全性。
海上目标探测系统主要包括水声探测组件,高精度A/D采集组件,FPGA数字处理器,无线数字传输单元及上位机显示界面。水声探测组件位于深海区,高精度数字处理单元级无线数字传输组件位于浅水区。解密盒及上位机显示界面位于接收终端。探测原理如图3所示。
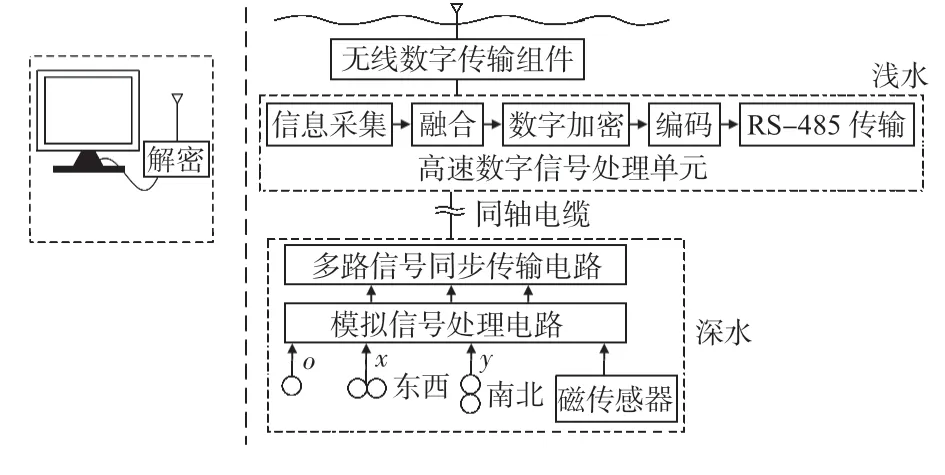
图3 海上目标探测原理框图
2.1 水声探测组件
水声探测组件包括磁传感器、矢量水声传感器、声压水声传感器,目标信号通过水声探测组件转换为微弱的电信号,水声探测组件的输出信号中既包括目标信号,还包括各种噪声源产生的噪声,这种混合信号需经过放大、滤波、隔离等方式进行预处理。水声信号由声压水听器和矢量水听器进入水声探测组件电路进行初步处理后,再由处理电路进行处理。磁传感器敏感轴正方向与矢量水声传感器的y轴振速通道平行,其输出的数字信号直接通过FPGA 硬件处理器进行信息加密。
2.2 数字处理单元
如图4所示,高精度数字处理单元包括高精度A/D采集组件,FPGA数字处理器及无线数字传输单元。高精度A/D采集组件包括3组数字采集器,利用24位高速数字采集芯片ADS1256实现信号的高度还原。3组数字采集器同时同时工作,0 时差同步采集,保证水声信号的高精度、高保真。FPGA数字处理器完成信息的融合、加密、编码。多组承载着被测目标信息的数组进入FPGA后首先进行预处理,同时会先将3组采集到的声信号与磁信号排列、组合成一个数据串送给加密模块进行加密处理。加密后的数据会按照特定的帧格式从IO口送出。数据串以密码报文的形式通过485数据传输格式送出,在无线传输过程确保信息的安全性。数字系统处理框图如图4所示。

图4 数字处理系统框图
无线数字传输组件利用LoRa 扩频技术实现远距离高可靠传输,无线数字传输组件纠错能力强,在突发干扰的情况下,能主动纠正被干扰的数据包。
2.3 FPGA硬件编程
FPGA接到开始命令后,对FPGA 内部寄存器进行配置,并对串口格式进行配置,加密数据以128 位为1 组,接收16组数据后,FPGA内部会生成1 组密钥对128 位数据进行加密,加密后的数据拆分成16 帧数据,通过串口发送给无线传输模块驱动程序,并通过无线传输模块将数据发送给上位机。
FPGA在加密、解密过程中大部分使用乘法器和加法器。乘法器和加法器主要耗费数字信号处理器(look-up table,LUT)和查找表(look-table,L-T)[20]。因此,在程序代码写入时要注意FPGA内部资源的规划,程序流程如图5所示。

图5 加、解密流程
3 加、解密仿真
在QuartusⅡ仿真软件下的加、解密部分仿真[21],运算中的数据长度设置为32位,加密后的密文发送到海上无线网络上,设置n 为取模的模值,clk 为时钟信号,频率为33 M,rst为复位信号,rdy 为加密完成指示信号。2 个大素数p =999 959,q =998 117。经过计算得出私钥d =625 901 391 693,明文为625 901 391 693,加密后的密文为983 662232742,解密后信息为625901391693。从仿真结果中可以看出,经过加密后的明文能够成功解密回来。其中时钟信号和复位信号与加密部分一致。
4 实 验
深海中声道受海水表面波浪、洋流和季节变化的影响小,水声环境较为理想,正常的测量应在深海放置水声探测组件,声道效应更加稳定。但由于实验条件有限,实验仅在潜水中完成,水声探测系统在浅海域中的探测距离严重地受高衰减和有限水深限制,前者是由声波与海面、海底的相互作用引起,后者造成了无法远距离声传播的弊端[22]。
实验由于水深的影响,只接收到了水听器声压信号,对声压信号进行频谱分析依然可以粗略分析到目标信号的部分信息。取不同探测距离下采集数据进行频域谱级分析,积分时间1 s。由图6(a)可以看出,在800 Hz 处出现谱级最大值,以800 Hz处谱级为标准做归一化,得到带内噪声谱级约为-50 dB,比接收信号低50 dB。
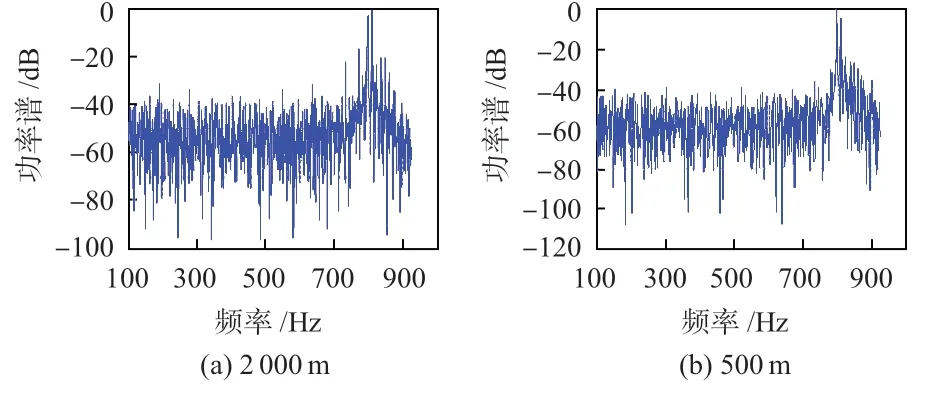
图6 远、近距离测试下数据频域分析
由图6(b)可知,系统接收到的信号频谱归一化图,可以看到带内噪声比信号谱级低60 dB左右。根据被动探测声纳方程中
按距离传播损失TL =20logR计算,2000 m距离传播损失为66 dB,500 m距离传播损失为54 dB,相差12 dB。分析图6(a)为2 000 m距离下探测结果,图6(b)为500 m距离下探测结果。
5 结 论
本文采用RSA加、解密方式实现了海上目标探测的空间安全传输,通过高精度水声探测组件及FPGA 高速数字处理器实现目标信息的采集、融合、加密、传输等。利用数字处理手段,将目标信号的正交的矢量水声和声压水声信号0时差采集和磁信号共同通过簇式加密的方式将信号同步无线传输给上位机。经过实验表明,本文实验能够实现高精度高保真目标信息还原。
