多波束定点实时冲刷监测系统构建及应用
2024-01-12李最森魏荣灏张芝永吴智敏
李最森,章 琪,魏荣灏,张芝永,吴智敏
(1.浙江省水利河口研究院,浙江 杭州 310020; 2.浙江省河口海岸重点实验室,浙江 杭州 310020; 3.富阳区农业农村局,浙江 杭州 311400; 4.浙江树人学院,浙江 杭州 310015)
随着沿海地区经济的快速发展,河口、海湾区域大型桥梁不断涌现,迄今为止,我国已建成的5 km 以上桥梁约45 座(截至2020 年)[1],约占世界总数的40%,主要分布在我国东部和东南沿海,是沿海交通生命线、经济大动脉的关键节点。在河口、海湾地区,跨海大桥所处的水域环境远比单向河流复杂,尤其是钱塘江、椒江、瓯江、飞云江等强潮河口,为了保证桥梁的安全运行,对桥墩局部冲刷过程的实时监测显得尤为重要。海塘是沿海地区防御风暴潮灾害、保障经济社会发展和人民群众生命财产安全的重要基础设施,是防御风暴潮灾害的第一道防线,我国已建成海塘约1.45 万km。近年来极端天气频发,我国沿海台风暴潮呈多发、频发、连发态势,海塘安全风险日益加剧。因此,塘脚冲刷过程的实时动态监测也日益提上日程。
基于上述应用场景,为保证涉水建筑物基础在复杂水动力、地质条件下和整个服役期内的安全运行,开展局部冲刷定点实时监测技术研究,融合多波束测深、导航定位、姿态改正、数据无线传输、水下伺服云台、数据处理及实时成图等技术,达到在极端情况下也能够实时监测局部冲刷演化过程,获取现场时间序列全覆盖水下地形数据的目的,以期为相关冲刷机理研究及防灾减灾提供基础数据。
1 国内外研究进展
近年来随着信息化技术的进步和智能化感知设备的发展,局部冲刷监测技术发展极快,各有优缺点。但在水下地形全覆盖实时监测领域仍然存在亟待解决的问题:一是缺乏连续、实时、适用于高含沙水流环境的局部冲刷动态监测技术;二是缺乏拥有自主知识产权的监测系统。
1.1 点式冲刷监测技术
点式冲刷监测技术方法多样、发展成熟,固定安装于结构物测量单点水下地形的冲淤变化。浮力驱动式、压力水深式、电导率式、声呐监测装置、光纤布拉格光栅(FBG)传感器等[2-5]较为常用。如Briaud 等[6]开发了浮力式驱动监测装置,应用于美国的Guadalupe River Bridge;压力水深式监测技术应用于苏通大桥、台湾双园大桥等[7-8];2020 年,Maroni 等[9]首次将电导率式智能探头应用于新库姆诺克(苏格兰西南部)的A76-200 号大桥上,获取了近2 年的连续冲刷数据。张芝永等[10]则率先在金塘大桥采用基于声呐的监测装置,监测桥墩单点的冲刷变化,获取了近5 年的连续监测数据。单点式冲刷监测技术发展成熟,但普遍局限于单点地形冲淤变化的测量,由于河床冲淤的随机性,单点的地形冲刷规律与局部范围可能不一致。
1.2 线式或面式监测技术
多点布置单点式冲刷监测装置,可实现低分辨率的线式或面式冲刷监测,但此方法工作量大、造价高,且必须依靠结构物布置,难以覆盖局部冲刷的对象区域。在实际工程中,常用方法仍然是利用超声波测深技术[11-12]实现线式或面式水下局部地形冲刷的监测。利用商用走航式单波束或多波束测深系统[13]对整个测量范围进行扫测[14]。限于设备运行条件和人力物力,此种方法采集的数据后处理时间一般为1 个月,最短也需3~4 h,无法实现实时监测,导致局部冲刷最深值[15-16]难以捕捉,影响局部冲刷规律的研究和涉水工程冲刷安全的精准评估。但此类方法可得到分辨率达0.5 m 的较高精度局部冲刷地形图,冲刷坑形态反演较好。因此,改进或研发线式或面式的监测技术,以实现一定范围水下地形冲淤变化的实时监测,成为目前局部冲刷监测领域的研究热点。
1.2.1 传统走航式单波束测深技术(线式监测技术) 单波束测深技术通过检测换能器往海底发射的超声波的双程传播时间,再结合声速计算水深,结合潮位改正后可以得到相对于选定基面的水深或高程值。走航式单波束测深技术主要使用GNSS 设备进行平面或三维定位和授时,利用声呐进行单点测深。测船通过走航可以获取航迹线上多个测点的数据,从而获取水深断面数据,汇聚多条测线形成水下地形测图。
1.2.2 走航式多波束测深技术(面式监测技术) 单波束测深获取单点的数据,采用等时或等距的方式记录数据,导致可能缺失局部范围最深或最浅点的信息,难以再精确插补;测船航行时受潮流、潮位等影响也会因偏航导致无法获取对应测线及测线之间的水深数据。为此,在20 世纪60 年代研发了多波束测深系统,通过条带测量的方式由线成面实现了水下地形的全覆盖测量。现有的多波束测深系统基本由3 个子系统构成:(1)多波束声学子系统,包括发射、接收换能器基阵和信号控制系统,负责发射和接收多波束信号,与外围辅助设备系统之间数据和指令的交互传输等;(2)多波束外围辅助设备子系统,主要包括导航定位系统、姿态传感器、罗经、表面声速计和声速剖面仪等,用于确定各波束脚印的位置及水深;(3)数据采集处理子系统,主要包括对各类数据进行采集与后处理的软、硬件系统。
多波束测深系统在河道、航道及海洋水下地形扫测,涉水建筑物水下冲淤、桥墩、风电桩基础冲刷监测,水下管网检测等方面发挥了重要作用,获取了全覆盖高精度的水下地形数据[14-19]。
2 多波束定点实时冲刷监测系统构建
多波束测深系统可获取条带水深数据,通过走航的方式实现面状全覆盖测量。但定点实时监测要求监测频率较高,常规的走航作业无法满足需求;采用固定安装的声呐探头也仅能获取条带数据,无法较好反馈监测区域的水下地形变化,因此本文研发了基于伺服云台的定点实时监测系统。
2.1 系统架构
本文所述定点实时监测系统主要由多波束测深子系统、伺服云台、本地存储及控制终端、无线传输、云端存储等部分构成,功能主要包含定位、姿态改正、数据解析、数据处理和成果出图等。关键构成部分是多波束测深子系统改造及伺服云台控制。根据大桥、海塘冲刷等不同工况定向开发测深系统功能,并根据常见实时监测需求定制了伺服云台,通过云台旋转带动多波束测深系统实现面状测量,结合非走航姿态改正技术,改进了常规多波束测深系统固定安装时仅能对某一固定剖面进行观测的不足,扩大了设备的应用场景。系统的具体架构如图1 所示。
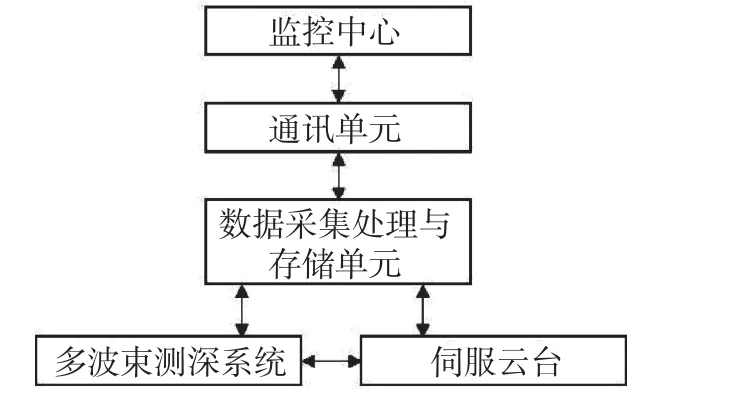
图1 系统架构Fig.1 System architecture
2.2 关键技术
多波束定点监测系统的关键技术在于多波束定点监测系统的标定和测深数据处理。为准确归算多波束测深数据,伺服云台系统与多波束测深系统集成后需要标定,解算出多波束测深系统与伺服云台系统的姿态相对关系。将多波束声呐探头与云台及伺服系统进行刚性连接,按照传统多波束测深系统标定的方式标定,即选择平坦的海底区域进行往返测量求取横摇参数,在具有特征的海底区域分别使用往返测量和同向测量求解纵摇和航偏角。同时,由于本系统具备时间同步功能,因此无需进行时间延迟测量。伺服系统通过云台带动多波束声呐探头旋转,为了提高系统观测精度,分别对云台旋转0°、90°、180°和270°的横摇、纵摇和航偏角进行标定。
如果定点监测系统应用于桥梁基础冲刷监测,则通常固定安装于桥梁承台附近,受桥面遮挡一般无法通过GNSS 系统进行准确定位,可以通过采用全站仪观测的方式测量系统安装位置,得到准确的位置。多波束声呐探头通过云台的旋转进行测量。伺服云台旋转360°后,系统可以获得以旋转中心为圆心,测深条带长度为直径的圆形测区水下地形数据。图2 为伺服云台及水下地形扫描示意图。
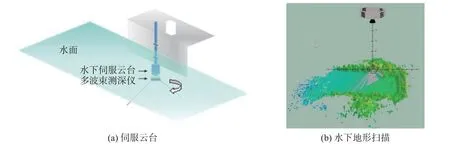
图2 伺服云台及水下地形扫描示意Fig.2 Schematic diagram of servo platform and underwater terrain scanning
实时定点监测设备一般与观测区域呈正交,即垂直于海底安装,因此定义北方向为X轴,东方向为Y轴,Z轴垂直向下。观测时云台围绕Z轴进行旋转,则多波束测深系统观测的数据叠加了云台旋转γ,采用欧拉角可表示为:
对于倾斜安装的云台,假定与X、Y和Z轴的角度分别为α、 β 和γ,则可采用欧拉角叠加了云台姿态的多波束测深数据:
通过式(2)的改正,可以解决伺服云台垂向安装的问题,根据监测工作的需要灵活选取所需的安装倾角,实现对象区域的定点实时监测。
对多波束定点监测设备采集的数据,主要通过程序进行数据预处理和人工后处理两个步骤。定点监测数据属于时空连续监测,其观测区域和观测间隔较为一致,可以根据观测对象定义阈值进行自动预处理。以桥梁桥墩局部冲刷观测为例,桥墩水下结构的观测数据及跳点属于典型的噪声信号需要滤除。首先从初始观测中提取出桥墩水下部分的数据,然后结合观测误差建立桥墩数据缓冲区间,对后续采集的桥墩信号进行自动滤除。同时,对于时空序列的数据中孤立的局部观测数据,如最浅点和最深点等进行自动标记。人工处理主要判别预处理的结果,对标记的异常点进行审核筛选,并检验核定是否存在其他异常数据。
2.3 工作流程
基于伺服云台驱动的多波束实时定点监测数据采集的主要流程为:首先将多波束定点监测设备与云台进行刚性连接,然后采用传统多波束校准的方法求取多波束定点监测设备与云台的初始安装参数,如横摇、纵摇和艏向等。进而对云台进行初始化,从正北(定义为0°)开始旋转云台,将编码器读取的角度与姿态传感器进行融合,记录多波束测深的位置、姿态、航向、水深和时间信息用于后续解算。
3 监测系统应用及成果示例
3.1 监测成果
为研究冲刷规律、监测冲刷过程,选取某大桥的特征桥墩为例利用定点实时监测系统进行观测。根据桥墩局部冲刷观测的既有成果选取冲刷深度富余量较小的目标桥墩安装多波束定点实时冲刷监测系统。基于多波束测深的数据量大,在本地存储观测数据的基础上,将数据传输至控制中心,利用改进后的采集软件对上传数据进行初步滤波,过滤跳点和明显不符合实际规律的数据后进行处理和分析,从而获取实时冲刷数据。初步清洗后的观测数据经过各项改正后,系统根据设置的预警值进行自动判别,对超限的数据依据相关基础资料和有关理论,进行准确性评价,并基于实时监测数据进行实时预报。
某桥墩的实时地形数据如图3 所示,表征的是2 个不同时刻的水下地形渲染图,这2 个时刻可以是系统采样的时间间隔,也可以是时间序列数据中抽取的2 个典型水下地形变化的时刻。根据对比分析,可发现往复流作用下,水流流向与流速随时间呈周期性变化,群桩基础上下游均为冲深明显区,迎流侧、背流侧、冲刷坑无明显差异,冲刷形状较为对称。群桩中泥沙淤积形状也趋于对称。在水流往复作用下更多易起动的泥沙被带起并随着水流运动,当流速减缓,水流挟沙能力降低,泥沙更易落淤。因此群桩间形成了四周深、中间浅的冲刷坑,与单向流作用下迎流区有较大的泥沙淤积不同,往复流作用下冲刷坑外淤积幅度较小。
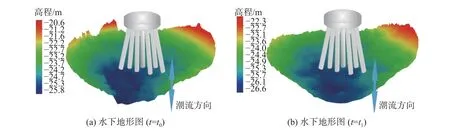
图3 多波束定点实时监测成果Fig.3 Real-time monitoring results by multi-beam sounding system at a fixed point
桥墩局部冲刷主要受阻流尺度影响外,还受潮流动力与泥沙特性的影响。目前国际上最为常用的桥墩冲刷公式为HEC-18 公式:
式中:hb为桥墩局部冲刷深度;hp为一般冲刷后水深;K1、K2和K3分别为墩形修正系数(圆柱为1.0)、水流攻角系数和河床条件修正系数;B为桥墩有效阻流尺度,群桩的B=K4Bt,其中Bt为桥墩群桩投影宽度,本示例取7.1 m,K4为桩距因子,K4=1−4/3(1−a/Bt)[(1−(a/L)−0.6],其中a为桩径,L为间距;Fr为傅汝德数,Fr=v/(ghp)0.5,其中v为墩前行进流速,g为重力加速度。以上公式中并未含泥沙特性的参数,而根据实测资料发现桥墩局部冲刷深度与潮流流速、泥沙起动流速具有较好的相关性。结合某大桥桥墩冲刷实时监测数据,拟合得到可用于预测往复潮流下黏性土桥墩局部冲刷计算式,该式计算结果与实测值误差在20%以内(见图4),预测精度明显高于HEC-18 公式。
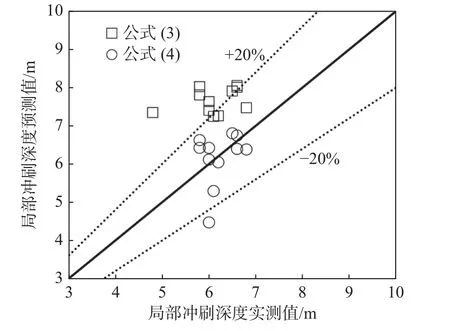
图4 各公式计算结果与实测值对比Fig.4 Comparison of calculated results with measured values by different formulas
式中:vc为泥沙起动流速。
3.2 精度验证
为了验证多波束定点实时监测系统的精度,对监测区域采用同步多波束走航测量获取地形数据验证定点实时监测系统所采集的数据,比对结果表明1 mm 范围内高程校差在水深为[0, 0.1] m、(0.1, 0.2] m、(0.2,0.3] m 及大于0.3 m 时的点数(占比)分别为273 个(74.9%)、61 个(16.8%)、30 个(8.3%)及0 个(0%)。共比对检验364 个点,其差值≤0.3 m 为364 点,占总比对点数100%,定点监测设备的测量精度符合水深测量规范的要求。
4 结 语
多波束测深系统作为一种高效的水下地形测量手段,已得到广泛应用,但由于传统走航式测量无法在诸如洪水、台风暴潮等恶劣工况下实施,开发了一种定点实时监测系统,通过伺服云台的旋转带动多波束声呐探头旋转,实现局部区域水下地形的冲刷实时监测,所构建的基于多波束测深仪的定点实时监测系统,能较好完成指定范围的冲刷实时水下地形监测工作,获取的时间序列地形数据测量精度符合水深测量规范要求,且满足冲刷监测需要。
多波束定点实时监测设备当前需要固定场所如码头、桥墩等涉水建筑物才能安装,作业要求较高,下一步可研究基于浮动平台的监测方案;同时,在数据智能滤波、快捷处理,精度评估和提升等方面深入研究,以便在更多应用场景中实施水下地形变化过程定点实时监测。
