基于低轨星的通导融合安全定位技术体制与性能验证
2024-01-12伍蔡伦郎兴康赵精博孙洪驰
伍蔡伦,郎兴康,王 同,赵精博,孙洪驰
(1.中国电子科技集团公司第五十四研究所,河北石家庄 050081;2.卫星导航系统与装备技术国家重点实验室,河北石家庄,050081)
0 引言
卫星导航是一种利用卫星提供定位、导航和授时服务的技术,具有高精度、全球覆盖、不受地形和天气影响等优点,能为各行各业提供低成本高精度定位导航服务[1-4]。在航空航天领域,精准定位和导航能提高飞机、舰船卫星等航海航空航天器的飞行安全性和效率,保障人员和设备安全;在交通运输领域,可信定位和导航能提高汽车、火车、船舶等交通运输工具的效率和安全性,减少交通事故和拥堵。随着航天技术的不断发展,卫星导航系统的精度和覆盖范围也在不断提高,未来卫星导航系统将会更加广泛应用于民生等各个领域。
尽管卫星导航技术已经取得了很大进展,但仍存在一些缺陷[5-8]:(1)易被欺骗:卫星导航信号可以被伪造来欺骗接收器,导致定位误差或被欺骗;(2)信号功率不够:卫星导航信号功率有限,会导致在某些环境下信号弱化或丢失,影响可用性和定位精度;(3)抗干扰能力差:卫星导航系统抗干扰能力相对较弱,容易受到电磁干扰、雷电等外部干扰因素影响,导致定位精度变差;(4)安全问题:卫星导航系统的安全问题也是需要考虑的因素,黑客攻击、恶意干扰等行为可能会破坏系统正常运行。
低轨卫星由于覆盖重数多、落地功率高以及具备双向信息认证等优点,低轨导航增强系统已经成为解决上述问题的一种有效手段,也是获取低成本、高可靠、实时高精度动态定位服务的优选之路。世界各大国均已开始部署全球低轨星座,意图抢占低轨航天先机,如具有代表性的美国铱星系统和星链计划。美国从2006开始研究构建集多种导航资源,具有更强可用性、鲁棒性和导航作战能力的国家定位、导航与授时(positioning navigation timing, PNT)体系。其中PNT体系与通信系统的融合是建设重点之一,通过二者深度融合提高PNT服务弹性和韧性,目前已在新一代铱星系统上实现并提供服务[9]。
新一代铱星星座已部署完成75颗在轨卫星,提供卫星授时和定位(satellites time and location, STL)服务。根据公开资料显示,STL定位精度达到20m,授时精度为1μs[10-12]。铱星STL信号用于导航的优势主要有:一是相对于GNSS信号,具有更强信号落地功率,能够在衰减条件(室内深处)以及一定恶意干扰条件下提供定位授时服务;二是铱星采用48个点波束,将点波束和随机广播相结合形成了基于位置认证的服务机制,能够抵抗欺骗干扰。
2015年9月20日,长征六号火箭成功将20颗小卫星送入太空,其中6颗搭载了实时精密定轨验证载荷,开启了我国关于低轨导航增强系统的序幕[13]。武汉大学牵头研制的“珞珈一号”科学实验卫星于2018年6月发射,该卫星首次成功开展了低轨卫星导航信号增强技术验证,实现了双频增强信号播发,为低轨卫星导航增强技术验证积累了大量在轨实测数据[14]。2018年12月29日,鸿雁星座首颗试验星“重庆号”在酒泉卫星发射中心发射升空,计划在2023年建成由60颗左右卫星构成的窄带系统,在2025年建成约270颗星构成的宽带系统。该星座就是利用低轨卫星实现导航增强功能,使高性能导航服务从行业用户进入大众市场[14]。中国电子科技集团公司在2019年6月发射了网通一号双星(天象一号A/B星),用于低轨卫星通信和低轨导航增强技术体制的融合验证,为我国后续基于低轨卫星的通导融合技术发展打下了良好基础[15]。
综上,低轨导航增强系统已经成为当前卫星导航领域的热点方向,世界上各大国和组织均在开展相关研究工作。利用低轨星座进行通导融合设计,实现全球无缝覆盖的PNT服务,是低轨导航增强技术的重要发展趋势,也是我国进一步打造北斗全球服务核心竞争力,提升国际影响,谋求时空信息领域竞争博弈优势的重要保障。因此,面向低轨星座导航增强的服务需求和发展目标,文章针对下一代天基通导融合安全定位技术体制展开研究,实现通导一体化融合设计并进行性能验证,为通导融合安全定位技术体制的实现提供参考依据。
1 通导融合发展趋势
目前国内关于低轨通导融合体制的研究和工程应用主要集中于快速高精度定位、抗干扰定位及安全定位等方面。
快速高精度定位主要利用两路兼容北斗的双频导航信号实现增强,实现快速收敛的精密定位。低轨导航信号采用L频点,具有较高的穿透能力,但其精度受到多径效应和大气延迟等因素影响。低轨卫星播发双频导航信号可有效消除电离层和对流层误差,实现高精度、高可靠、快速定位服务。
抗干扰定位通过低轨卫星播发Ka导航增强信号,接收机获取观测数据(如伪距、多普勒等)及低轨卫星导航电文信息后,在卫星四重覆盖条件下实现快速定位。 Ka导航增强信号带宽大、波束窄、功率高(天线增益高),可大幅提升用户终端抗干扰能力,实现北斗拒止环境下的抗干扰定位导航服务。
安全定位是卫星导航系统在航天、航空等领域最重要应用之一。基于低轨星的通导融合安全定位技术是在北斗信号拒止环境下实现独立于北斗的可信定位服务。该定位技术体制可通过多次观测一颗或多颗低轨卫星L频段播发的通导融合信号,通过双向鉴权以及不依赖于北斗的独立定位来互校验定位结果,从而实现“安全定位”,以达到可信和反欺骗的定位能力。低轨卫星通导融合相比GNSS信号的落地功率更高,且通信导航信号融合设计,充分利用了频谱资源和功率资源。
综上分析,基于低轨卫星L频段通导融合安全定位体制能有效解决传统卫星导航技术在抗欺骗性、信号功率及安全性等方面的不足,是对现有北斗卫星导航系统的备份补充,能有效扩展卫星导航系统的应用场景。因此,文章主要针对基于低轨卫星L频段通导融合安全定位体制展开研究,并完成相关算法的服务性能评估。
2 安全定位技术体制
2.1 信号频率设计
安全定位技术体制基于天基窄带通信的L频段信号实现,利用通信时隙播发导航电文并利用高精度多普勒和伪距测量实现导航定位与授时。其中,L窄带通信体制采用相邻36个带宽为150KHz的子带播发通信信号,整个窄带通信信号带宽为5.4MHz。安全定位信号位于窄带通信体制下的第n个子带上,带宽同样为150KHz,子带时隙为30ms。天基通导融合安全定位技术体制信号频谱分布如图1所示。

图1 窄带通信体制下的安全定位信号频谱Fig.1 Secure positioning signal spectrum under narrowband communication system
2.2 信息帧设计
通导融合安全定位信号的信息帧主要包括帧同步头、周计数、周内时计数以及与轨道计算和卫星位置计算相关的电文信息,有效电文共640bit。信息帧采用1/2LDPC信道编码对导航电文进行编码,完成编码后形成1280符号的电文帧,对电文帧均分为10份,每份含有128符号,并在每份电文数据前添加12bit子帧头(用于子帧识别和组帧)后进行8倍扩频,扩频后形成1120bit安全定位导航电文子帧数据段。电文组帧方式如图2所示。
图2 电文信息帧设计Fig.2 Design of Message Information Frame
子带时隙为30ms,播发固定字(80bit)和子帧数据块(1120bit),其中子帧数据块为测距码调制的电文子帧数据。固定字是由0和1组成的某个固定序列,用于实现子帧同步,从而获取伪距和载波相位。测距码码长为1120bit,码周期为28ms,码片速率为40kcps。
3 算法设计与仿真
3.1 算法设计
根据多普勒效应原理,用户终端相对卫星发射信号的等多普勒面是一个锥面,用户终端位于以观测卫星为锥顶的圆锥面上。通过单颗卫星多次测量或对多颗卫星测量,就可以获得若干等多普勒圆锥面,这些圆锥面相交处就可以确定用户位置,满足四个或以上多普勒观测量即可实现用户位置和时间的解算。
(1)观测模型
单星多普勒定位的基本方程如式(1)所列:
(1)

(2)鲁棒最小二乘解算模型
在定位解算中,定位方程中待估参数的偏导数的表示如式(2)所列:
(2)
(3)
(3)基于伪距信息的授时算法
在安全定位获得用户终端位置后,利用安全定位信号伪距测量结果估计钟差,并对接收机时钟进行修正,完成授时。钟差估计方法如式(4)所列:
δtuk=ρk-|rk-r|
(4)

综上所述,安全定位授时算法流程如图3所示:
图3 安全定位授时算法流程Fig.3 Security positioning and timing algorithm process
3.2 仿真结果
安全定位服务基于卫星载波的多普勒实现测速定位,因此载波多普勒观测精度与定位精度直接相关,而载波多普勒跟踪精度取决于信号强度即载噪比。另外,接收机时钟漂移也会影响安全定位精度。因此,本节分别从载噪比和接收机钟漂两个方面进行仿真,研究载噪比和接收机钟漂对安全定位精度的影响。
结合当前卫星互联网星座通导融合信号功率大小和卫星覆盖情况,设用户初始位置(0N,120E,10m),仿真时间500s,接收信号载噪比分别设置为60dB-Hz、55dB-Hz、50dB-Hz、45dB-Hz,卫星覆盖重数分别为1~3颗。按照仿真条件,得到实时载波精度、后处理精度以及300s定位精度,其结果如表1所列,其中实时载波精度采用锁频环得到,后处理精度采用开环估计算法得到。由表1可知,信号载噪比越高,环路跟踪误差越小,定位精度越高。另外,设置不同的初始值,所得结果基本一致,可见初值的选择不影响最终定位结果。不同载噪比下锁频环精度仿真结果如下图4所示。按照当前卫星互联网星座L频段通导融合信号功率水平,低轨卫星信号载噪比可达60dB-Hz,定位精度采用载噪比为45~60dB-Hz范围内的信号进行评估是符合实际情况的。

表1 不同载噪比对安全定位精度的影响Tab.1 The impact of different carrier to noise ratios on the accuracy of secure positioning

图4 不同载噪比下锁频环精度Fig.4 Frequency locked loop accuracy under different carrier to noise ratios
接收机钟漂也是影响安全定位服务能力的重要因素。通过时长两小时的实测数据,统计得到的钟漂变化率为10-13量级,因此加入10-13的钟漂变化率后,在不同可见星数目场景下进行仿真验证,仿真结果如表2和图5所示。通过表2统计得到了接收机钟漂变化前后定位精度。当可见卫星数目不足时则定位精度受接收机钟漂稳定性影响很大,需要接收机采用更高精度的时钟。而当卫星数目达到3颗及以上时,接收机钟漂稳定性影响不大,无需对接收机时钟提出更高要求。
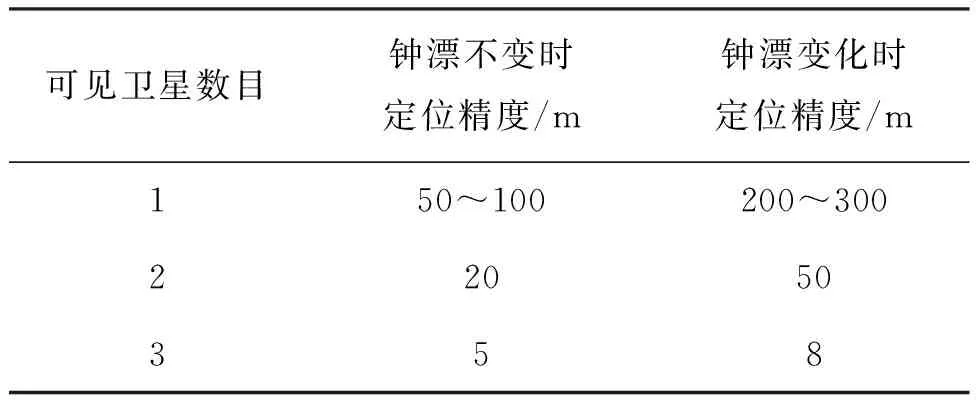
表2 钟漂变化对安全定位精度的影响Tab.2 The impact of clock drift changes on the accuracy of safe positioning
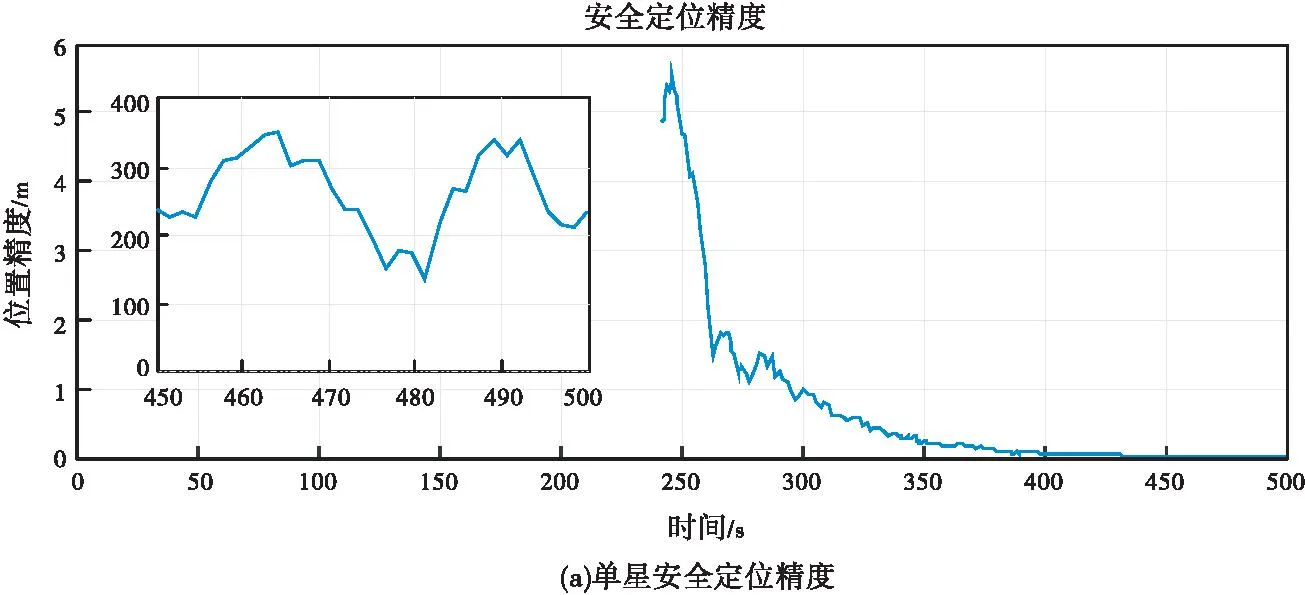
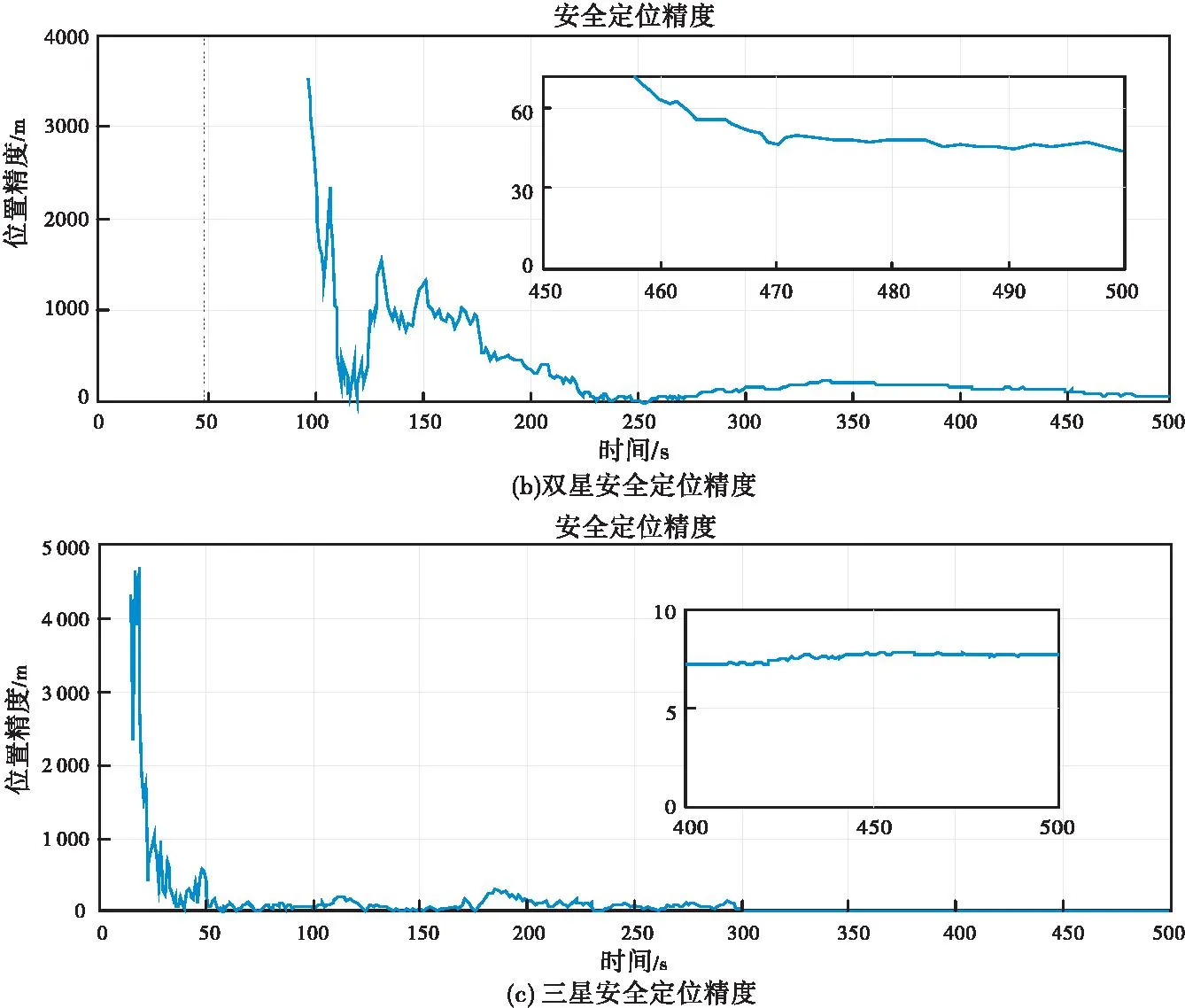
图5 不同可见星数目对定位精度影响Fig.5 The influence of different visible star numbers on positioning accuracy
从图5可以看出,单星场景下接收机钟漂变化对定位精度的影响十分敏感,而3颗星时,接收机钟漂对定位影响很小,这也说明了可见星数目也是对定位精度影响最大的因素之一。
4 实际性能验证
根据第2.1节和2.2节信号格式完成了安全定位技术体制信号模拟源和接收终端的硬件研制。假设信号发射场景为单波束,一个完整电文帧播发时间设为0.5s(实际播发一个完整电文帧所需时间为0.3s,剩余的0.2秒不播发任何信号),因此安全定位技术体制信号模拟源能够生成周期为0.5s的电文帧,接收终端按照技术体制协议,完成安全定位信号接收并解调电文。安全定位信号收发示意图如图6所示,信号收发采用同源方式,可忽略时钟同步以及大气延迟效应等误差对信号测试结果的影响。

图6 信号实际收发示意图Fig.6 Schematic diagram of actual signal transmission and reception
接收终端完成15min信号接收,并对多普勒等观测数据进行输出。图7给出了在载噪比55dB-Hz条件下的多普勒测量结果。测试环境为同源测试,对载波多普勒观测量进行多普勒精度评估,其精度为0.9687Hz。对接收电文进行统计分析,由于电文0.5s播发一次,因此15min共接收完整电文1800帧,每个电文帧1280bit,15min共接收2304000bit,电文误码bit数为0,电文误码率为0,电文误码测试结果如图8所示。载噪比测试结果如图9所示,电文误码统计表如表3所列。
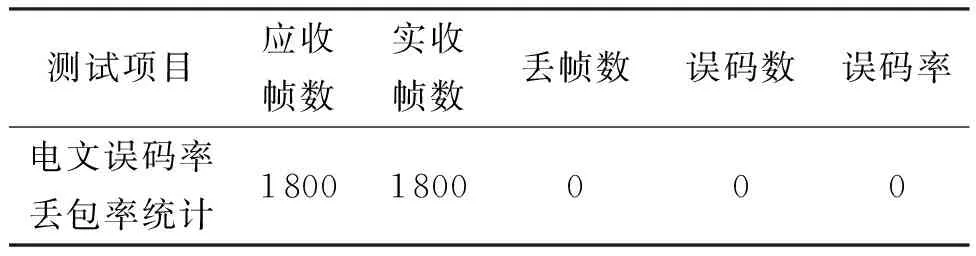
表3 电文误码率统计Tab.3 Statistics of message error rate

图7 多普勒测试结果Fig.7 Doppler test results
图8 电文bit误码测试结果Fig.8 Message bit error test results

图9 载噪比测试结果Fig.9 Carrier to noise ratio test results
5 结论
文章基于低轨星的通导融合安全定位技术体制进行了探索研究和性能仿真验证。针对当前通导融合信号的播发特点,设计了基于通导融合的安全定位信号技术体制,并通过仿真对安全定位技术体制进行了观测量和定位精度的性能验证。通过研制硬件收发平台,模拟信号单波束播发场景,也同步验证了安全定位信号的实际可用性和定位性能。因此,基于低轨星的通导融合安全定位技术体制为我国低轨卫星通导融合系统的工程化建设提供了技术参考,同时也是对我国北斗卫星导航系统应用的有益补充。
