无人机卫星导航欺骗式干扰技术的发展现状
2024-01-12易明疆李晋徽温志津
易明疆,李晋徽,温志津
(1.军事科学院系统工程研究院,北京 100083;2.电磁空间认知与智能控制技术实验室,北京 100191)
0 引 言
随着许多国家逐渐将低空空域开放,加上开源飞控的发展使得无人机制作更加简单,成本低廉,2005年之后,无人机进入发展高潮期,以“无人机”为主题的研究呈逐年增长态势[1](如图1所示)。学者曾预言2020年美国境内会超过15 000架无人机,但事实上,到 2015 年中期,无人机的月销量已超过15 000架[2]。伴随着无人机的高速发展,无人机在包括航空摄影、地质调查、交通测量、通信探测和货物运输等新兴领域大放异彩[3]。
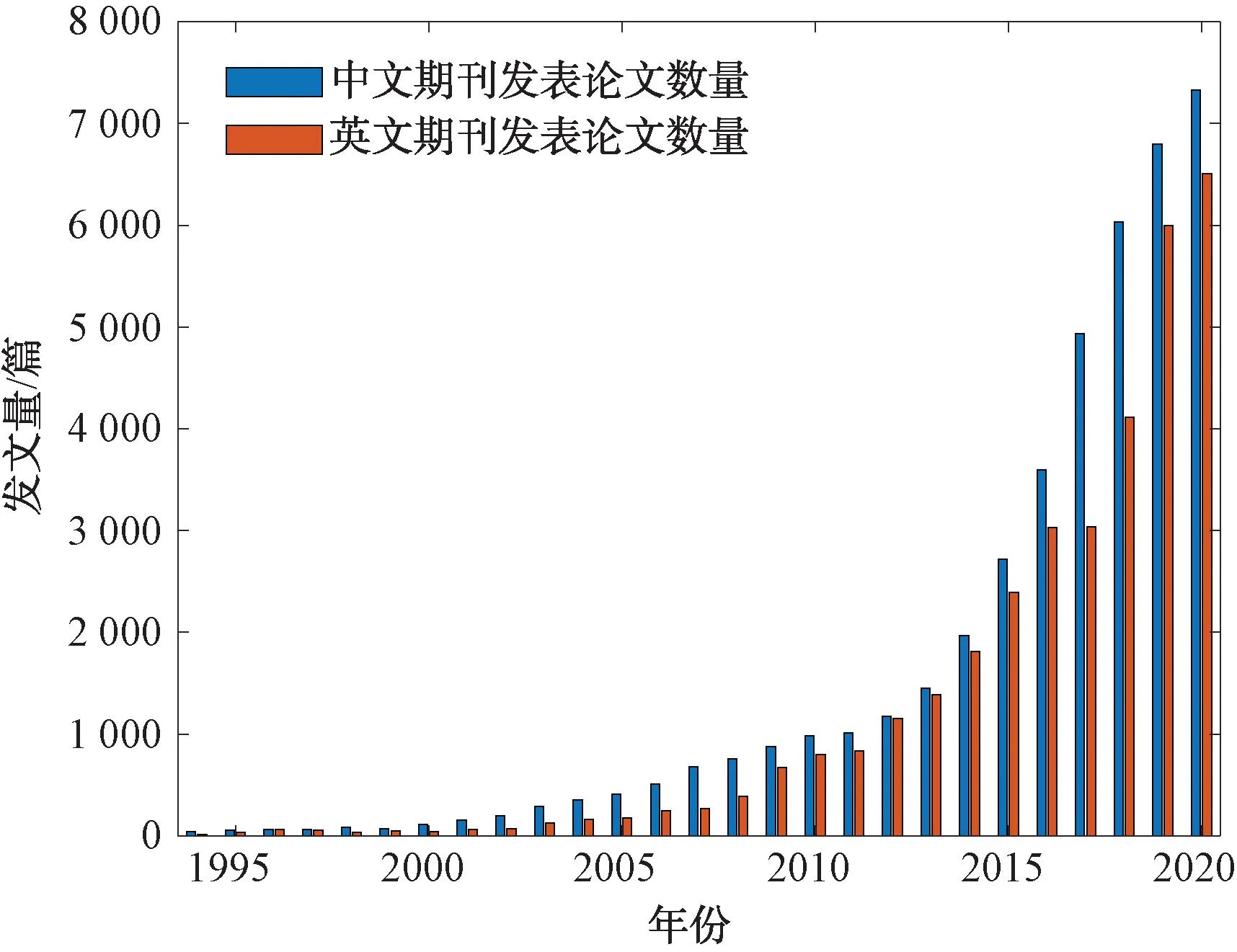
图1 中国知网近年来以“无人机”为主题的中英文期刊发文量
但与此同时,无人机技术的高速发展和无人机数量规模的庞大造成了一定程度的监管难题[4],其中数量最庞大并已成为民用无人机主流的“低慢小”无人机(低飞行高度、慢速度以及小体积)[5]问题尤其突出。另外,大量“低慢小”无人机的操作员只是业余爱好者,并不知道无人机可能造成的潜在危险[6]。由此,无人机滥用、黑飞和恶意使用给国家安全带来了诸多威胁,导致世界各国愈加重视反无人机技术研究工作,并产生了诸多无人机反制相关的技术体制。
无人机反制方式通常分为3类:摧毁技术、压制式干扰技术、欺骗式干扰技术。摧毁技术无法保留完整的无人机,并且无人机坠落的过程中,还可能产生额外的伤害,导致应用场景十分有限[7]。压制式干扰技术干扰效能较低,容易被敌方发现并摧毁,并且随着频域滤波技术、抗干扰天线技术、伪卫星技术、组合导航技术等抗干扰技术的应用,大大增加了压制式干扰的难度[8-9]。欺骗干扰技术通过直接入侵目标接收机跟踪环路来控制目标机的飞行路径,没有产生额外的损害。所以,欺骗干扰技术是无人机管制的理想解决方案。
欺骗式干扰技术的主要原理是通过劫持无人机的通信链路或导航链路来控制目标无人机。不论是通过卫星导航、无线网络还是其他无线电控制诱导,都能很大程度上帮助解决无人机管制难的问题[10]。相比较而言,劫持卫星导航链路的欺骗(卫星导航欺骗)因其具有隐蔽性强、威胁性大的干扰特点,逐渐成为干扰技术研究的热点之一[11]。卫星导航欺骗可以利用重放或制造欺骗信号来完全控制导航系统,以隐蔽欺骗的形式使接收机的定位错误,从而驱动无人机的轨迹[12]。欺骗一旦成功实施,所产生的后果无法估量,因此,需要对导航欺骗技术进行深入研究,确保其在反无人机应用中发挥相应功能。
由于全球定位系统(GPS)信号的开放性,导航欺骗主要集中在GPS欺骗上。GPS民码缺乏认证机制,信号模拟器或低成本开源设备可以轻松模仿GPS信号[13]。并且由于GPS信号十分微弱(到达地球的信号功率约为-160 dBW),欺骗信号可以通过功率优势提高接收机被捕获的可能性,进而误导目标接收机利用错误的伪距进行定位解算[14-15]。因此,目前所有的欺骗手段均只针对民用GPS信号展开[16-17]。
1 无人机卫星导航欺骗式干扰技术实施方式
近年来,成功实施无人机卫星导航欺骗式干扰的实例有很多:2011年12月,伊朗军方诱捕了一架美国“哨兵”无人机(见图2),这是全球电子战中首次利用欺骗干扰技术捕获敌方无人机的案例,轰动了世界[18]。2012年12月,伊朗革命卫队在海湾水域再次捕获一架美军“扫描鹰”无人侦察机[19]。这也再次证明了伊朗使用的干扰方法的可行性。同年,美国军方同样利用欺骗式干扰技术,成功实验了对无人机爬升和下落的控制。2013年,德克萨斯大学奥斯汀分校Humphreys 团队于“白玫瑰”号游艇上进行了 GPS 欺骗实验,成功将该游艇诱骗至与原始航线偏离1 km的位置。

图2 美国RQ-170“哨兵”无人机
无人机卫星导航欺骗的本质是使欺骗信号代替GPS信号进入被控无人机接收机,使得解算出的虚假位置进入无人机控制环路,从而达到控制机体的目的。根据工作原理,导航欺骗的实施可分为转发式导航欺骗和生成式导航欺骗。其主要原理如图3所示。
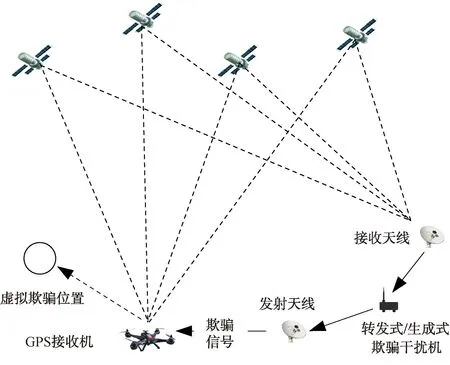
图3 转发式/生成式欺骗干扰原理图
1.1 转发式欺骗干扰
转发式欺骗干扰通过转发GPS信号来增加导航信号的传播时延,控制产生功率放大后的欺骗信号,使得一定区域内接收机接收到欺骗信号,进而测得错误伪距,实现错误定位,以此实现干扰[20-22]。
1.2 生成式欺骗干扰
基于GPS民用信号结构都是公开透明的特点,生成式欺骗干扰可以直接复制信号的射频载波、C/A码和导航数据比特,通过改变这些参数的值,使得接收机解算出错误的导航定位结果[23-25]。
2 无人机卫星导航欺骗式干扰技术研究现状
转发式欺骗对设备要求较简单,但为保持目标接收器的钟差稳定,转发时延必须为正,这就对欺骗位置有一定的限制,降低了转发式欺骗的使用价值[26]。生成式欺骗可以自主地发射欺骗GPS信号,并且可以添加正负均可的时延,自由度及灵活性较好。生成式欺骗干扰的干扰效果更好,因为其干扰方式不会使接收机产生任何错误警报[27]。由于生成式欺骗技术成熟,产生的欺骗位置灵活,目前所使用技术大多基于生成式欺骗技术。针对无人机的导航欺骗技术,最新研究主要聚焦于无人机诱导技术研究、组合导航欺骗研究和欺骗隐蔽性研究3个方面。
2.1 无人机卫星导航欺骗诱导技术研究
无人机诱导技术是无人机导航欺骗的基础问题,主要解决欺骗中控制过程对欺骗路径的影响问题,是研究欺骗实施效果的“蓝图”和“范本”,主要分为诱导策略研究、控制研究和轨迹研究。
2.1.1 诱导策略研究
无人机导航欺骗的目的是引导无人机进入指定区域。因此,在导航欺骗工程实现过程中,选择合适的欺骗策略,建立欺骗信号与无人机运动之间的映射关系是非常重要的。
(1) 利用“禁飞区”的诱导策略
在工程实现方面,导航欺骗策略已被整合入多种反无人机系统之中。其中相对最容易实现的诱骗策略是给无人机施加“禁飞区”的信号诱骗其降落。“禁飞区”的欺骗方案缺点也很明显:若无人机本身不预设禁飞区则不受影响,或诱骗的禁飞区位置与前一时刻所处位置相差过大,则自检机制不会接受诱骗信号。
因此,为对大多数无人机进行欺骗,国内外相关研究都集中在对使用欺骗信号来诱导无人机运动的方案进行研究。借助定位偏移,逐步拉偏无人机飞行轨迹,最终将无人机诱导至特定位置和轨迹。其基本诱导策略模型主要有悬停状态下的诱导策略和直线飞行状态下的诱导策略。
(2) 悬停状态下的诱导策略
在悬停状态下,无人机会根据当前位置与悬停点的位置差,朝向悬停点修正飞行。在当前位置后方发送虚假位置可引导无人机飞向前方诱骗位置,具体原理示意如图4所示。
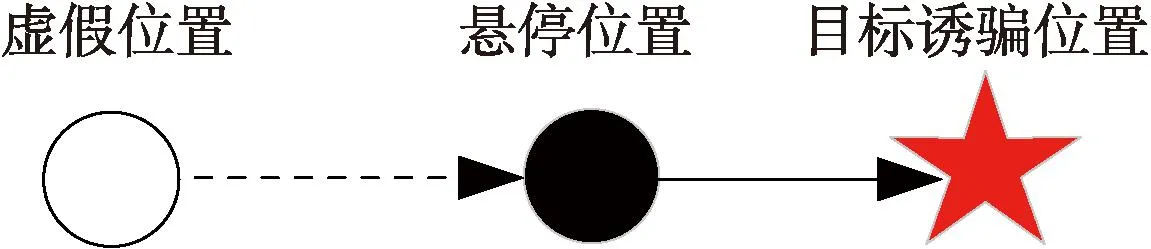
图4 无人机悬停诱骗模型
(3) 直线飞行状态下的诱导策略
在直线飞行状态下,无人机会从当前位置朝向目的点进行飞行。在确定无人机的目的点后,通过发送多个虚假位置,逐次改变无人机飞行方向达到拉偏的目的,原理如图5所示。

图5 无人机直线飞行诱骗模型
Li M等提出了一种用于计算无人机误导位置的欺骗策略:利用接收机输出的位置和速度的控制误差,来设定逐步欺骗位置[28]。根据诱导模型原理,He D等通过简易的GPS信号模拟系统进行欺骗攻击,位置欺骗信号通过自适应算法不断产生,使无人机成功向指定位置移动[29]。Ma C等根据欺骗信号对接收环路影响的稳定距离区间来设定欺骗起始点的作用范围,并根据飞行步长逐步修正航线[30],如图6所示。

图6 一种根据接收环路稳定性设置的欺骗策略
2.1.2 诱导控制研究
欺骗策略需结合诱导控制模型进行欺骗。欺骗干扰的核心目的是使欺骗影响进入到无人机控制环路,达到控制量偏移的目的。诱导控制研究就是探究偏移量在控制环路的转移机理。需要说明的是,进行诱导控制研究时,通常结合无人机飞行控制闭环模型进行研究。其主要研究欺骗信号进入无人机飞行控制系统后无人机的响应过程。
欺骗控制量进入飞行控制系统后,在环路中逐级产生影响:在飞控规划路径后,依次影响期望位置、期望速度、期望姿态、期望推力及反馈的整个控制环路[31]。其主要原理如图7所示。
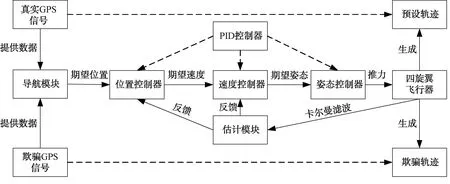
图7 无人机飞行控制逻辑框架图
环路中的控制主要以PID控制为主[32],相关研究围绕基于控制算法实施欺骗展开。2014年,奥地利理工大学的Daniel P.Shepard等构建了一个连续时间线性系统模型,来探讨捕获后控制的动力学问题。使用比例导数(PD)控制器跟踪实际轨迹的位置和速度,外环产生姿态和推力指令,内环产生控制面指令来跟踪外环指令的姿态,得出GPS欺骗不会影响内环性能的结论[33]。
2.1.3 诱导轨迹研究
诱导轨迹是诱导控制的外部表现,是导航欺骗效果的直接体现。近年来,导航轨迹的研究集中在如何隐蔽拉偏轨迹和利用合适轨迹跟踪算法完成需求任务。
2015年,徐成勋认为要想让无人机准确到达目标点,必须知道无人机目标的位置、引导方向和航路点[34]。
2021年Ma C等基于胡萝卜追逐算法、非线性导引律、纯追击与视线算法和矢量场算法4种路径跟踪算法分别建立了欺骗路径规划模型,提出了欺骗稀疏搜索算法。建立由欺骗信号决定的无人机搜索空间模型[35],如图8所示。

图8 随机代价下SSAS算法的应用
2.2 无人机组合导航欺骗研究
针对组合导航的欺骗研究是近年来又一研究重点。无人机利用组合导航技术来增强在各种环境下的导航可靠性,其中较为常见的是GPS导航系统和惯性导航系统(INS)组成的组合导航系统,其原理如图9所示。惯性导航系统是一个具有隐蔽性强、独立性较高以及抗干扰能力较强等优点的导航系统,但其误差会随着时间而累加[36]。组合导航可以很好地结合GPS和INS的优点,克服二者的不足:一方面,GPS可改善INS的误差累加现象;另一方面,INS具备短期精度高的特点,保证GPS接收机在GPS信号弱或是受到干扰时正常工作[37]。无人机组合导航系统的引入增大了实施导航欺骗的难度;并且,在检测欺骗攻击方面,对于配备了惯性导航系统的无人机对位置变化的动态响应更加敏感[38]。

图9 GPS/INS组合导航结构
2.2.1 欺骗影响研究
组合导航的欺骗需要综合考虑惯性导航对导航结果的估计和反馈作用,需要结合卡尔曼滤波器研究欺骗信号注入后对于组合导航定位的影响。2018年,Liu Y等以组合导航系统的卡尔曼滤波为重点分析了欺骗干扰对组合导航系统的影响,发现在欺骗攻击下,估计的惯性传感器偏差不再可靠[39]。
2.2.2 欺骗策略研究
欺骗策略主要结合欺骗的输入控制来进行效果上的研究。2019年,Guo Y等发现当欺骗信号的加速度分量为无人机当前加速度与欺骗控制输入之间的差值时,GPS/INS组合导航的无人机可以被隐蔽欺骗[40]。
2.3 无人机卫星导航欺骗隐蔽性研究
GPS/INS组合导航是无人机抗欺骗的一种有效手段,所以对于GPS/INS组合导航的欺骗,就需要考虑在告警门限下欺骗的问题,即隐蔽性欺骗研究。无人机组合导航的告警门限主要来源于GPS系统和惯性导航系统之间的数据融合分析。惯性导航系统提供的姿态信息以及角速度信息,可利用GPS提供的全时段高精度位置信息来修正系统的各项误差参数,以此来提高虚假定位的告警率;与此同时有利于 GPS 接收机提高天线定向操纵性,帮助它快速锁定可见卫星。二者的相互作用促使复合导航系统性能和抗欺骗能力达到最优化。
其中,无人机多采用归一化新息平方检测进行导航欺骗检测,主要原理是通过无人机组合导航系统估计的无人机状态与接收到的卫星导航信号之间的协方差(新息协方差NIS)是否超过正常误差范围阈值(预警限)来检测受欺骗程度。相关研究主要围绕阈值下的欺骗动力学及欺骗轨迹等进行。
2.3.1 欺骗状态量变化研究
首先是探究预警限的约束下欺骗状态量变化范围。其目的是在此约束条件下的状态量变化范围内,设计的欺骗策略同样不会突破预警限。2011年,苏黎世联邦理工学院的研究人员研究了欺骗信号功率、定时和位置精度不同的情况下接收机预警限下的最小位置精度[41]。2011年Humphreys团队研究了欺骗过程中预警限的动力学问题,通过发出一系列欺骗信号来采集无人机接收后做出位置偏离变化的加速度和速度值。根据以上信息,便可使用其极限值来规划无人机的欺骗轨迹[42]。
2.3.2 欺骗实施条件研究
其次是隐蔽条件下的欺骗实施条件探究。2014年,伊利诺伊理工学院的研究人员表明,如果完全了解无人机的飞行轨迹,欺骗信号有可能在不被自检监视器发现的情况下进行较大位置误差的欺骗[43],如图10所示。
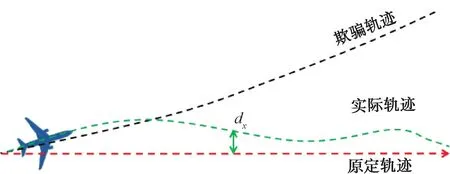
图10 欺骗、估计及实际轨迹示意图
2.3.3 欺骗策略研究
最后是隐蔽条件下的欺骗策略的研究。2017年,Humphreys团队重点研究了欺骗规划轨迹的预警限,得出沿交叉航线轨迹多个传感器可能会引起预警,而沿航迹偏离的欺骗策略引起响应可能性相对较小的结论[44]。2019年,Liu Y等基于NIS检测证明了对斜坡型故障剖面的有效性,以及在某些欺骗场景下测量平均优于新息平均的优势[45]。
2.4 现状总结与不足分析
根据上述关于无人机导航欺骗干扰技术的发展情况分析可知:近年来,各研究机构对该领域的研究热度较高,并相继产出了一定的研究成果,但是目前还存在如下不足之处亟待解决:
(1) 部分领域研究不足。对于组合导航模式下的欺骗方法考虑不足,目前只有美国德克萨斯州立大学对松耦合的组合导航方式有一定的研究,对于基于深耦合和紧耦合的组合导航方式下的欺骗研究相对较少甚至空缺。
(2) 缺乏欺骗的评价指标。缺少对导航欺骗控制的量化评价指标,很多学者更加偏重于研究分析欺骗攻击成功的精度要求和目的要求,如拉偏角度、新息检测量度、欺骗轨迹拟合程度等。但是对于实施代价和欺骗程度的量化标准考虑不足,目前缺乏量化指标体系对其成功性进行评价。
(3) 欺骗效果不够精确。大部分研究机构都涉猎了导航欺骗中无人机被欺骗后的动力学模型及相关欺骗路径跟踪的问题,并没有基于欺骗策略研究组合导航无人机接受误差的容忍度和鲁棒性,没有对无人机多模式做自适应研究,没有基于无人机飞控规划原理进行欺骗。
(4) 缺乏欺骗研究的验证环境。大部分仿真均为策略和单个模型的实验室数值仿真,缺少基于实际飞控在环的导航欺骗策略的全机模型可视化仿真。
3 无人机卫星导航欺骗式干扰技术的未来发展展望
结合该领域中卫星导航欺骗式干扰技术的不足之处,期待其在以下方面形成突破:
(1) 适应最新的无人机技术体制和作战形态
近年来,基于多种组合导航形式的无人机导航技术迅速发展,随之而来的就是导航欺骗的难度不断加大。卫星导航欺骗相关研究应当尽快适应新的无人机技术体制,提高成功干扰的概率。加强发展基于多种组合导航、与惯导的深组合及紧组合的导航欺骗研究。探究适应多种组合导航形式的无人机导航欺骗策略以适应对抗的需要。同时,蜂群作战是无人机的最新作战形式,应当加大适应对抗蜂群欺骗的相关研究力度,研究制定适合对抗蜂群的多无人机欺骗策略,力求达到适应大规模集群的无人机导航对抗作战需求,突破数量,形成实战能力。
(2) 形成实际化和精准性的针对欺骗策略
无人机导航系统和飞行控制系统联系紧密。导航欺骗不能只关注导航的引导作用,还需更多关注导航引导下飞行控制对于无人机的影响作用,根据一系列的连锁控制作用来进行欺骗的规划和设计,才能做到有的放矢,精准掌控。针对飞行控制做欺骗效果方面的研究,可以提高欺骗的精准性和提升实际轨迹效果。同时,在实际欺骗模拟中,导航欺骗策略应当考虑同时适应不同惯导精度、雷达引导精度、欺骗信号精度、无人机多模态飞行模式,并且应当考虑实际地形及天气等对于导航欺骗策略的影响作用。
(3) 建立从实施到评价的欺骗验证模型体系
建立合适的欺骗评价指标体系,定量定性描述无人机导航欺骗的实施效果,在统一的体系中评估各项导航欺骗对抗策略的效能。同时,建立形成欺骗体系化的整套装备实机模拟策略验证仿真系统。依靠单一的导航欺骗干扰技术很难达到理想效果,所以需要结合目标识别与跟踪、无线电侦察、欺骗信号控制等多项科研技术,建立导航欺骗在环仿真系统及实机欺骗验证系统,为实机的欺骗验证做以铺垫。
4 结束语
随着以无人机为主的智能化无人战场的不断演进,以卫星导航欺骗式干扰技术作为无人机反制手段的研究受到越来越多的关注,成为各研究机构和众多研究人员重点研究的课题。本文梳理了导航欺骗研究的三大热点,即无人机卫星导航欺骗诱导技术、无人机组合导航欺骗技术及无人机卫星导航欺骗隐蔽性技术。结合导航欺骗实施的相关技术原理、各研究机构研究现状及不足之处,对未来无人机导航欺骗发展趋势进行展望,期望能够对未来无人机卫星导航欺骗式干扰技术领域的发展起到一定的启示作用,达到真正有效全面管制无人机和打赢未来无人化战争的目的。