地球自然矢量场定位导航技术发展研究综述
2024-01-12晏磊施闯李安曾庆化张全德汲万峰陈三明
晏磊,施闯,李安,曾庆化,张全德,汲万峰,陈三明
( 1. 北京大学空间信息集成与3S 工程应用北京市重点实验室, 北京 100871;2. 桂林航天工业学院计算机科学与工程学院, 广西 桂林 541004;3. 北京航空航天大学电子信息工程学院, 北京 100191;4. 海军工程大学电气工程学院, 武汉 430030;5. 南京航空航天大学自动化学院, 南京 210016;6. 中国卫星导航定位协会, 北京 100036;7. 海军航空大学航空基础学院, 山东 烟台 264001 )
0 引言
地球观测作为二十一世纪最重要的高技术国家战略领域,它包含两个要素:一个是观测对象(What)及其分子物理化学特征(Why)即遥感;一个是四维时间加空间即定位导航(Where,When).
定位导航是一门古老而又年轻的科学. 在卫星定位导航系统出现之前,远程定位与导航主要利用无线电导航系统. 无线电定位导航经过了罗兰-C、Omega、多普勒系统等方法,在定位与导航技术发展历史上起到了非常重要的作用,但其覆盖的工作区域小,电波传播受大气影响,定位精度不高,这在很大程度上限制了它的发展和应用. 直到二十世纪九十年代GNSS的发展,可在全球范围内为海上、陆地、空中和空间用户提供全天候、全天时、高精度的定位、导航和授时服务,使船舶、飞机和汽车等运载工具的定位与导航发生了跨时代的变革[1]. 但GNSS 也存在着一些不足之处,如卫星信号易受干扰、在隐蔽地区接收效果差、无入水能力、对水下定位有一定的难度,并且在一些特殊环境及关键时刻应用会受到很大的限制.另一方面,惯性导航系统(inertial navigation system,INS)虽然短期定位精度高,但误差会随时间积累[2].基于这种考虑,在卫星信号不能覆盖或者受到电磁干扰的环境下,研究独立自主的定位导航新技术显得尤为重要.
1 地球自然矢量场
地球自然矢量场,是指可以在地球全域或相当区域自然形成的矢量场.
由于自然界中存在的万有引力和地球的自转,地球周围的空间中分布着地球重力场和地球磁场. 地球重力场是指地球重力作用,一般认为是地球万有引力的作用,其大小取决于地球内部物质的分布,以及纬度和地球自转,通常指地球表面附近的地球引力场[3].
地球磁场是由于地球自转而形成的,位于地球内部及其周围空间内的矢量场,地磁场遍布于地球近地空间,是一个矢量场,其是由各种不同来源的磁场叠加构成的,按其来源可把地磁场区分为两大部分:一部分为主要来源于地球内部的稳定磁场;另一部分为主要起源于地球外部的快速变化磁场[4].
受到地球自转带来的牛顿力学影响,在地球内部介质不均匀性的影响下,地表出现了不同的地形构造,地形地貌可以以高程场来表征. 因为地表高程的变化是连续的,我们可以将不同区域尺度的高程垂直梯度变化作为“场轴”,不同高程的平滑区域视为不同的高程“力线”,由此对稳定的地形地貌可以以自然高程矢量场加以规范,形成地形地貌高程的自然矢量场[5].
太阳辐射进入地球时会受到大气粒子、地表等的折射、散射和反射影响,使得太阳光产生偏振现象.以太阳电磁波的形式,经地球地气圈层的偏振作用向地物传递能量,形成场源-力线结合的天空偏振场. 偏振场是除了地磁场和重力场的另一个重要的自然场[6].已有的全域自然场的成因是牛顿力学即万有引力和地球的自转效应,未考虑天体的能量入射效应,即太阳光的能量入射作用;而偏振场是太阳照射整个地球形成的、在地球周围空间分布的全域自然场,它跨越了牛顿力学惯性空间,进入光量子运动即光速范畴,成为时空相对论效应的基础激励源. 天空偏振场和地球重力场、地磁场一样具有全球性的特点,存在很多相似性;其本身作为太阳能量入射地球的客观表征,具有广泛应用前景;三场结合,有望成为万有引力、地球自转与太阳能量相互作用于地球的完美表征和规律基础[7].
静电场指的是观察者与电荷量不随时间发生变化的电荷相对静止时所观察到的电场. 它是电荷周围空间存在的一种特殊形态的物质,其基本特征是对置于其中的静止电荷有力的作用[8]. 对于静电陀螺(electrostatic suspended gyroscope,ESG),处于高度真空的球形电极碗中的球形转子与碗电极之间的间隙很小,在电极与转子之间加上支承高压,在电极与球形转子之间形成了强电场. 当球形转子受到电场中的静电力平衡时,球形转子就被支承起来.
重力场、地磁场、地形地貌高程“场”、太阳入射的偏振场和人工静电场都可以以不同的形式用于定位与导航. 在地球重力场中,每一点所受重力的大小和方向只同该点的位置有关,与地球磁场、静电场一样,地球重力场也有重力、重力线、重力位和等位面等要素[9]. 地磁场及其时空变化包含着固体地球及地球空间环境的重要信息[10]. 自然界的许多动物利用地球磁场进行定位导航. 由于地球内部介质的不均匀性,因此在地球自转的作用下,使地表出现了各异的地形地貌. 而这种随着高度改变的三维地形也可以视为一种地球矢量场,并利用其各异性来进行导航. 偏振光场导航的基本原理是:当太阳光或月光进入大气层被大气分子散射以后,在天空中就形成了一个对称于天顶与太阳连线的偏振模式图,动物就是依据自身轴线与偏振力线的夹角测知自己的方位,即从动物偏振视觉从中获取导航所需的方向信息;同时基于某个参照点如巢穴,完成导航功能[11]. 静电场也是一种存在于地球空间内的静电场,利用支承系统可以研制精密度极高的静电陀螺仪,能够对极其微小的重力变化做出反应,因此ESG 也被用来导航.
由于这些方法均属于被动定位导航,因此不受天气、信号干扰等客观条件的影响,具有很强的独立性与自主性,是建设更加泛在、更加融合、更加智能、更加安全的国家综合时空体系的重要组成部分. 尤其在深空、深地和深海科学研究中占有极为重要的地位[12]. 自然矢量场定位导航技术与卫星定位导航技术结合,有望将多传感器融合定位导航技术推向一个新的高度.
2 重力自然矢量场定位导航
重力导航是一种利用重力敏感仪表测量实现的图形跟踪导航技术[13]. 事先做好重力分布图,分布图中各路线都有特殊的重力分布. 重力分布图存储在导航系统中,再利用重力敏感仪器测定重力场特性来搜索期望的路线[14]. 通过人工神经网络和统计特性曲线识别法使运载体确认、跟踪或横过路线,到达某个目地点. 这种方法由于不进行辐射,不使用外部坐标,所以称为无源重力导航. 无源重力导航具有精度高、不受时间限制、无辐射,隐蔽性强等特点,符合21 世纪水下运载体“高精度、长时间、自主性、无源性”的导航需求,是未来导航发展的一个重要方向.
2.1 国外在重力辅助惯性导航科学上的研究历史
国外对重力导航系统的研究基本上可分为三个阶段[15]:20 世纪80 年代中期以前,研究工作主要集中在运动基座重力梯度仪、重力导航原理、匹配理论的研究;90 年代前后,研究工作主要集中在以重力梯度为匹配对象的无源导航系统;90 年代后期至今,以重力异常和重力梯度为匹配对象的高精度无源重力导航和海底地形估计(terrain estimation,ET). 重力匹配理论和算法以Kalman 滤波理论为主,部分系统采用迭代最近等值点 (iterative closest contour point,ICCP)算法[16].
20 世纪80 年代中期以前,重力导航系统的研究以Analytic Sciences Corporation 公司Warren G H 为代表,提出两种重力导航方案:重力梯度仪导航(gradiometer as an external navigation aid,GAEA)和参考椭球导航(reference ellipsoid formula as an external navigation aid,REFAEA)[11],奠定了重力导航研究的基础. 由于当时还没有重力分布图,方案主要是利用重力场统计模型和重力梯度作为观测量通过Kalman滤波估计位置、速度和重力梯度误差. Kalman滤波的状态向量为,其中,g为正常重力值, ξ 为北向垂线偏差角, δVn为北向速度误差, δRn为北向位置误差. 研究方法主要以理论分析和仿真实验为主.
20 世纪90 年代初,随着Bell Aerospace 公司旋转式重力梯度仪(gravity gradiometer instrument, GGI)的成功研制,利用重力图形匹配技术改善INS 性能的新概念被提出. Bell Aerospace 公司、洛克希德-马丁公司(Lockheed-Martin Federal System Inc)等机构对重力图形匹配技术开展了专项研究,并取得了预期成果[17]. 贝尔实验室以Albert 为代表的研究人员开发了重力辅助惯性导航系统(gravity aided inertial navigation system, GAINS),并于1994 年申请了美国专利. 该系统最多由三个重力梯度仪、一个装有垂向加速度计(GMA,作为重力仪)的三轴INS、一个测深仪、重力分布图和一个最优滤波器组成,通过与重力分布图匹配提供位置坐标,以无源方式实现减少和限定惯性误差,通过仿真试验可以获得约 6~305 m 的平面位置误差(CEP)和 0.004~0.5144 m/s 的水平速度误差.
20 世纪90 年代后期,洛克希德-马丁导航与重力系统公司(Navigation And Gravity System, NGS, 此时 Bell Aerospace 已并入NGS)研制成功通用重力模块(universal gravity module, UGM). 该系统提供重力无源导航(gravity passive navigation, PN)和ET 能力,于2000 年申请了美国专利. UGM 不仅成本低,而且可直接应用于现有导航系统,大大增强现在和将来舰载导弹和潜艇的巡航能力. 美国海军于1998 年和1999 年分别在水面舰船和潜艇上对UGM 进行了演示验证. 实验数据表明,采用重力图形匹配技术,可将导航系统的经、纬度误差降低至导航系统标称误差的10%;自主式水下潜器(autonomous underwater vehicle,AUV)系统上采用高精度的全张量梯度仪(full tensor gradiometer, FTG)重力导航可使导航精度达到30 m 的水平[18].
2.2 国内在重力辅助惯性导航科学上的研究历史
国内开展重力导航系统的研究始于本世纪初,主要单位有原海军装备研究院、北京大学、东南大学、哈尔滨工程大学、中国科学院测量与地球物理研究所、海军工程大学等单位. 其中,北京大学与原海军装备研究院合作,从适用于重力导航的全球重力场模型、重力实时测量理论和方法、重力异常图的二维随机场插值理论和重力异常匹配理论进行了系统化的研究,取得了一定的进展;哈尔滨工程大学主要围绕基于ICCP 算法的重力匹配定位和重力场的Kriging插值算法进行了研究;中国科学院测量与地球物理研究所在国家自然基金支持下开展了桑迪亚惯性地形导航系统(sandia inertial terrain-aided navigation,SITAN)算法,在重力匹配定位的应用以及利用卫星测高数据反演重力场异常进行了研究并取得了一定的进展;东南大学在“十五”国防预研项目的支持下进行了基于速率方位惯性平台和重力匹配、利用Kalman 滤波实现组合导航系统的研究[19];南京航空航天大学借助重力辅助(gravity assist,GA)方法,根据智能手机重力传感器的数据判断智能手机的不同使用模式,帮助智能手机在导航定位过程中实现航向修正[20];开展重力传感器及运动基座重力实时测量系统的主要研究单位有中国船舶重工集团707 研究所、华中科技大学和海军工程大学等单位.
针对单一匹配算法的局限性,出现了将SITAN算法和地形剖面匹配系统(terrain contour matching,TERCOM)算法相结合的组合匹配算法[9],降低了迭代次数,提高了匹配精度;将相关分析算法和非线性滤波算法相结合,可实现对载体真实位置的最优估计[21]. 通过对水下运载体航行轨迹矢量信息的提取,将惯导指示轨迹中相邻点间的相关性加入到点集匹配中[22],将运载体的运动速度与航向信息相结合,通过序列中采样点间的位置相关性对匹配结果进行校正的矢量匹配方法. 针对匹配精度低、误差大的局限,有基于三角形约束模型的重力背景图配准技术[23].此外,有学者通过研究海洋重力异常图特征,对重力匹配辅助导航的精度进行了分析[24];一种分层邻域阈值的方法可用于提高水下重力导航的匹配效率[25];2019 年,Wang 等[26]提出了一种特征参数匹配算法,针对水下运载体不同航行轨迹,计算了粒子滤波范围,并将重力场特征参数考虑进粒子权值,从而提高了匹配精度. 随着人工智能的不断发展,基于神经网络、支持向量机(support vector machine, SVM)[27]和蜂群搜索[28]的人工智能匹配算法也逐渐得到应用,但仍是传统算法占据主流.
综上所述,国内在重力导航方面的研究,主要集中在导航算法的研究,对于重力传感器方面的研究比较少,与国外相比还有很大的差距.
3 地磁自然矢量场定位导航
地心偶极子磁场和异常磁场统称地球主磁场,也称为基本磁场. 它是起源于地球内部的稳定磁场,并构成地磁场的主要成分,其变化极为缓慢[29]. 地球的变化磁场则起源于外部并叠加在主磁场之上的各种短周期的地磁场变化. 地球基本磁场变化十分缓慢,年变率在千分之一以下. 外源场变化的时间尺度比较小,变化比较复杂,平静时的外源场的强度不到内源场的千分之一,强扰动时的外源场也在内源场的百分之一以下. 但是,变化磁场部分十分灵敏地反映了近地空间的物理状况,是非常有效的表征空间环境扰动的物理量[30]. 地磁场是地球上一种重要的固有资源,地磁导航就是基于地磁场形成的. 其原理是通过地磁传感器测量载体所在位置的地磁信息,再与事先测绘完备并储存在载体计算机上的地磁图进行匹配,得出载体的实时位置信息[31];其次,捷联于载体上的地磁传感器随着载体变换姿态,地磁传感器根据不同的姿态输出不同的磁场矢量信息,以反映载体的姿态信息. 从地磁导航的原理上看,要想实现地磁导航,在地磁导航过程中导航信息与地磁量测信息以及地磁图三者的关系是研究的重点[32].
3.1 国外在地磁导航科学上的研究历史
地磁导航技术的研究起源于飞机导航和导弹制导. 20 世纪80 年代,美国波音公司已将地磁导航系统作为飞机的标准配置,其核心是全球地磁场模型软件;俄罗斯的1276 架运输机都装备有磁通门传感器,不同于需要15 min 准备时间的陀螺惯导系统,开机即可起飞. 在导弹制导领域,俄罗斯研究地磁匹配制导技术的时间较长,并且成立了专业研究所,以地磁场强度为特征量,采用磁通门传感器以地磁场等高线匹配制导方式,并进行了大量实验. 俄罗斯在“安全-2004”演习中试射了携带机动变轨多弹头的SS-19洲际导弹,据报道其采用了地磁场匹配制导技术[33].法国从1997 年开始研究一种全新的以地磁场为基础的炮弹制导系统,主要侧重于研制Kalman 滤波器,安装有滤波器制导系统的炮弹在飞行过程中大大提高了自我纠错校准能力.
对于地磁导航技术的发展,美国国防部于2003 年8 月将地磁数据参考导航系统列入其军事关键技术名单,随着技术发展,其纯地磁导航系统导航精度不断得到提升,地面和空中定位精度优于30 m圆概率误差(circular error probability,CEP),水下定位CEP 优于500 m.
3.2 国内在地磁导航科学上的研究历史
在国内,研究水下地磁导航技术的单位主要有天津航海仪器研究所、北京大学、国防科技大学、哈尔滨工程大学、海军工程大学等. 航天科工集团、国防科技大学、西北工业大学,军械工程学院进行了应用问题的初步探讨. 北京大学对水下地形、重力辅助惯性导航进行了较长时间的研究,由于重力场与地磁场的相似性,很多研究成果可用于地磁导航系统. 天津航海仪器研究所在水上INS 和组合导航系统方面的研究处于国内前列,并承担了与水下地磁/INS 相关的国防工程项目[34];中国国土资源物探遥感中心完成我国地磁场的普测成图,其中包括沿海地区的航空磁测,对地磁图的处理积累了非常丰富的经验[35]. 针对地磁匹配定位技术,航天35 所开发出GPS/三轴磁强计组合的自主导航系统软件,该系统采用模拟数据和卫星实测数据分别在所内试验室、北京西郊康西草原、官厅水库进行了仿真实验验证:当采用高精度重力场模型修正时,位置精度为12 m,速度精度为0.03 m/s,定姿精度为0.05°;在纯地磁导航时,位置精度为0.3~2 km,速度精度为0.3~2 m/s,定姿精度<1°.南京航空航天大学针对地磁定位提出了一种惯性/光流/磁组合导航方法,该方案具有成本低、导航自主性强、精度高的优点[36].
对于水下载体来说,利用地磁信息和INS 组合导航无疑是一个很好的方案[37],随着我国精密海洋地磁图的逐渐完善和我国高精度磁传感器的出现,水下地磁导航系统[38]的研究也将越来越受到重视[39].
4 地形地貌高程自然矢量场定位导航
为简化算法,本文以地形匹配定位导航代表地形地貌高程自然矢量场定位导航的全部描述. 地形匹配定位导航技术的原理如图1 所示,该方法首先对航行/飞行平台任务区域的地形进行勘测并依据测绘标准构建该区域的三维基准数字地形图数据库. 在平台执行任务时,利用传感器获得其所在位置的地形信息,并与数据库中的基准数字地形图进行比较,经过连续测量和合适的算法进行匹配运算,最终确定平台的准确位置信息. 将该匹配位置与INS 信息进行信息融合处理,可以较好地修正由于陀螺仪和加速度计等惯性传感器漂移及数据外推产生的定位误差,辅助INS完成自主远程精确定位导航. 因此地形辅助导航一般不作为独立的导航系统使用,而是作为INS 的辅助系统使用[40].
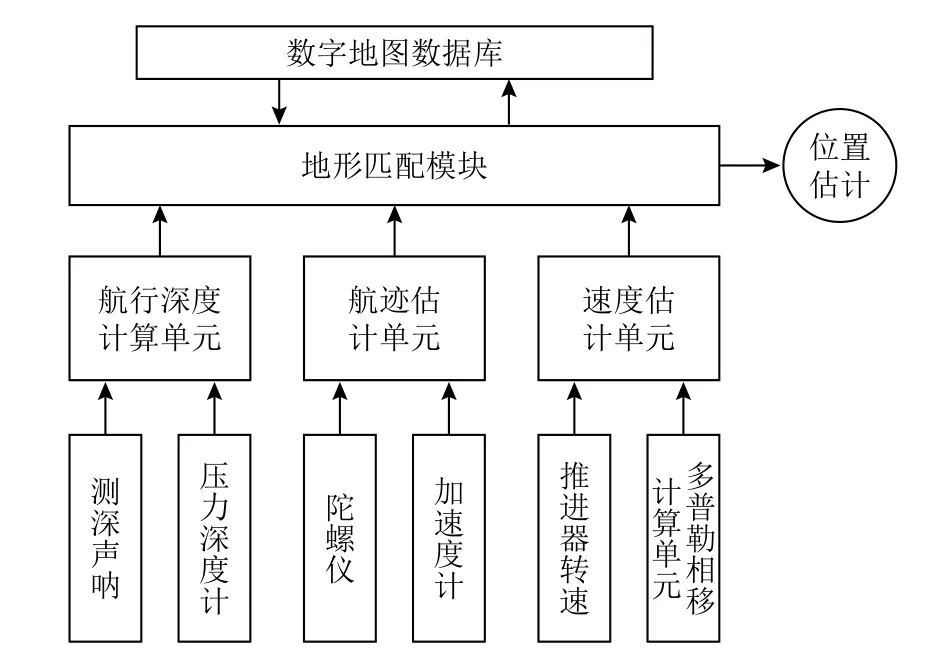
图1 水下地形辅助导航原理框图
4.1 国外在地形导航科学上的研究历史
地形定位导航的研究在上世纪70 年代末80 年代初取得明显的成果,完成了自动控制飞机做地形跟踪与地形回避. 英国不列颠宇航公司研制了地形剖面匹配系统(terrain contour matching,TERCOM),以扩展Kalman 滤波为基础,精确地将气压/惯性高度、存储的数字地图数据与INS 的误差作为模型,再利用雷达高度表真实测量值来修正. 美国设计的新SITAN,利用Kalman 滤波原理,连续不断地把INS 测量的数据与雷达高度表测得的数据结合起来,最佳地估算飞行器的位置、速度、姿态等信息[41]. 德国国防部与道尼尔公司投资研制的ISS 地形导航系统,主要包含激光雷达、数据处理器以及激光雷达信息和相应基准信息实时定位三部分[31].
悉尼大学的机械工程学院机器人研究中心最早开始从事基于地形辅助导航的水下机器人自动导航和控制,并提出了特殊定位和制图算法 (simultaneous localization and mapping algorithm,SLMA)技术. 首先是进行水下无人运动载体(underwater unmanned vehicle, UUV)位置估计,利用海底地形扫描声纳和水深传感器获取的UUV 位置和海底环境的特征结构信息,作为扩展Kalman 滤波器 (extended kalman filter,EKF)的输入数据,并估计UUV 的位置和海底特征地物的位置,以确定相对于海底特征地形的UUV 位置. 其次是进行海底特征提取,识别海底特征,为EKF 提供更加精确的海底地形观测数据. 该算法不但能够确定UUV 位置,还能及时对海底地形数据进行验证和更新. 另外一种常用的地形匹配算法是多模型自适应算法,它是利用一组并行Kalman 滤波器来搜索最佳匹配位置. 以INS 的位置信息、水深传感器获取的信息以及数字海底地形信息作为输入数据,输出的信息即为最佳匹配点位置信息和对INS的校正信息.
4.2 国内在地形导航科学上的研究历史
自20 世纪90 年代以来,我国一些科研院所就对地形定位导航匹配算法作了大量的研究. 2003 年,程辉等[42]利用小波包分解快速迭代进行地形二维匹配.2004 年,袁书明等[43]通过引入地形信息熵设计了地理信息熵最小方差匹配算法. 近年来,地形辅助导航系统逐渐向建立三维可视化和高精度的数字海底地形模型方向发展. 根据UUV 潜航的精度要求,建立基于格网模型和TIN 模型(不规则三角网)适合水下航行的数字高程模型 (digital elevating model,DEM),并精确反映水下的各种地形特征. 在UUV 潜航过程中,可以直接以DEM 的网格控制点信息作为地形匹配算法的输入信息,确定UUV 的经纬度位置和前进状态,并能进行海底地形仿真,实现海底三维可视化地形匹配导航. 2021 年,王雅婷等[44]提出了一种基于视觉数据集的类脑三维认知地图构建方法,提高了认知地图的精度.
近年来,地形导航系统也在向组合方向发展,如TERPROM/多普勒、TERPROM/GPS 以及更新形式的系统. 同时国内外大力发展地形匹配技术在舰船、潜艇和水下载体上的应用[45]. 导航算法是地形定位导航匹配算法的核心研究内容,空中和水下载体利用地形信息进行导航的原理有一定的相似性. 所以,地形导航算法有的是针对空中应用而提出的,也有的是针对水下应用提出的,而并不加以区分. 目前在相关领域研究比较成熟和集中的导航算法可以分为两大类:批处理相关导航算法和迭代递推导航算法. 批处理相关导航算法包括地形轮廓线导航(terrain contour matching,TERCOM) 算法、等值线导航(iterated closest contour point,ICCP) 算法等. 迭代递推导航算法主要包括SITAN 算法、VITERBI 最大后验估计算法和百航惯性地形辅助导航(baihang inertial terrain-aided navigation,BITAN)算法等,后两种算法均是对SITAN算法的改进和发展[46].
5 偏振光自然矢量场定位导航
偏振光导航是自然界中天然导航方法之一,该导航方法具有精确的导航能力[47]. 半个世纪以前,Frisch就发现蜜蜂能够利用天空中可见的偏振光进行定向.很多动物,如蚂蚁、蜜蜂、蟋蟀和候鸟,都具有偏振视觉系统[48-49],它们利用太阳光在大气中散射的偏振特性进行导航. 研究表明,蜜蜂、鸽子等昆虫能够利用偏振光分布的动态特性在短时间内确定天极点的位置,并利用它提供具体的导航信息,比如纬度、当地真太阳时以及真实(地理)的罗盘方向[50]. 除此之外,长距离迁徙的鸟还可以利用日升、日落时最大偏振线的位置校正地磁导航系统的方向信息,以进一步地提高导航精度. 根据2006 年8 月11 日的《Science》报导,候鸟通过日出和日落的偏振光图案来校准它们的地磁罗盘的积累误差,使其在每年数千千米的季节性迁徙中,仍能准确地回巢或到达目的地[51].
5.1 国外在偏振光场导航科学上的研究历史
偏振光导航作为一种新颖的导航技术,引起了国内外科研人员的广泛关注. 目前,美国、瑞士、瑞典、澳大利亚、俄罗斯等国家的学者都在对生物的偏振光导航进行相关研究.
Rudiger 等[51]从20 世纪60 年代开始对昆虫的偏振视觉导航进行研究时发现,沙蚁、蟋蟀等昆虫能够利用偏振光进行导航是因为天空中存在一个相对稳定的偏振光模式图,同时它本身具有对太阳光偏振方向极为敏感的视觉神经系统;乌贼拥有偏振视觉并利用偏振信息进行种内识别与交流;某些动物可以利用月光的偏振来进行定位导航[52]. 对于蜜蜂和沙蚁来说,它们都是从天空偏振光分布模式中获取方向信息,但距离的推算过程却不一样,蜜蜂利用飞行过程中所感受的光流推算飞行距离,而沙蚁可能使用本体信息推算距离[53].
在偏振光场的研究方面,Talbot[54]对水下偏振光分布进行了测量研究,说明水下偏振光的分布与天空偏振光分布有一定的相似之处,如图2 所示. 图2 中A 和B 表示太阳从正东升起时观测者视线从水平上升到天顶观测到的偏振模式图;C 和D 表示太阳在正午过天顶时观测者视线从水平下降到天底观测到的偏振模式图.
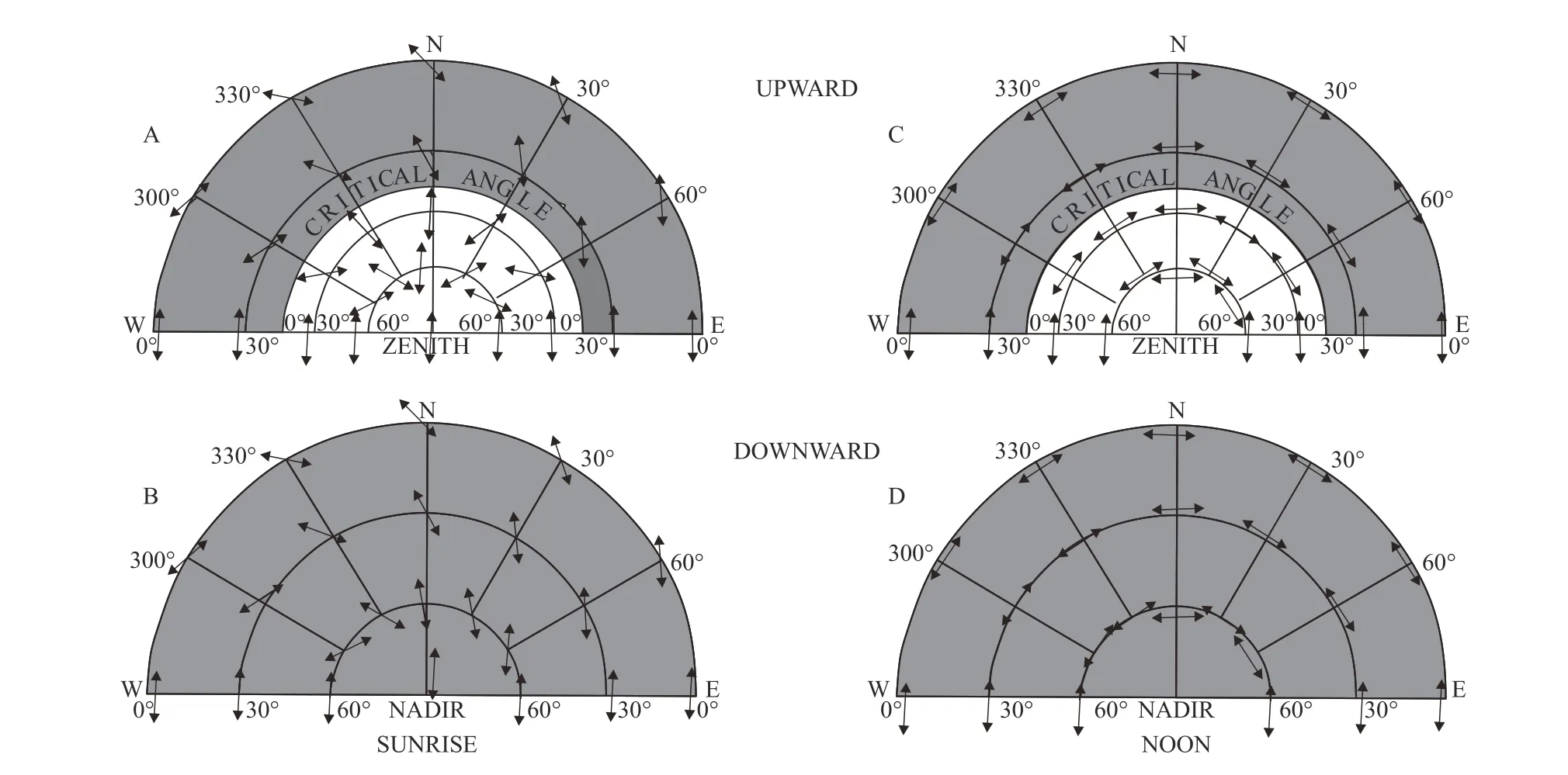
图2 水下偏振光分布模式图
Istvan 等[55]利用全天空偏振测量方法对红、绿、蓝三个波段的天空偏振光在不同天气条件下的分布进行了实验研究,结果表明,阴天时可见光波长越短,天空偏振信息的适用性越强. Thomas 等[56]讨论了水下生物的偏振视觉及其在目标识别、增强对比度以及信号探测等方面的作用,如图3 所示.

图3 水体表面对偏振光的反射
天空偏振光的偏振度和偏振角分布与太阳位置紧密相关. Andras[57]和Gabor[58]等定量分析了紫外波段和蓝绿波段线偏振度和辐射度的分布情况,认为在多云或植被遮挡的地区,线偏振度在紫外波段最大.因此,在多云天气或植被遮挡的地方,紫外波段线测量偏振度最为有效. Talbot[59]对水下220 m 处的偏振光分布进行测量研究,认为水下偏振光分布除了与太阳高度角相关之外,还与水深、波长有关.
在研究偏振光导航方法方面:Dimitrios 等[52]受昆虫导航能力的启发,提出路径整合和视觉领航的生物学模型,并研制出相应的平台,成功用于移动机器人Sahabot 2 上. 实验测量结果表明,利用偏振光导航的平均误差是13.5 cm,标准偏差是6.3 cm.
Schmid-hempel 等[60]对沙蚁的研究表明,沙蚁视网膜是由数百个面向不同方向的视神经感杆组成,每一感杆仅对与它同向的偏振光敏感. 单个感杆是由8 个互相交叉垂直的单向感光器组成,这一结构使得每一感杆对特定方向偏振光的刺激响应为正弦曲线,是一个严格的方向分析器. 而所有的偏振敏感神经感杆又模拟偏振光在天空中的分布在视网膜上形成一个偏振敏感阵列图[61]. 这样,当沙蚁绕头部转动身体时,神经响应发生系统的变化. 当沙蚁体轴与太阳子午线重合时,视网膜神经感杆的响应达到极值. 视网膜偏振敏感神经感杆的响应作为输入汇合到中枢神经层的视神经叶部. 视神经叶部的中间神经元分为三种类型,这三类神经元是偏振正交神经元,接受视网膜上最大敏感方向互相垂直的视神经感杆的输入[61].这三种中间神经元对视网膜输入的响应也是正弦曲线,在沙蚁体轴与太阳子午线夹角分别为0°、60°、120°时达到最大的响应值. 中间神经元的响应结果作为输入汇合到沙蚁脑部的罗盘神经元,经过其计算和译码就可以得出沙蚁体轴与太阳子午线的夹角,从而实现其导航功能.
5.2 国内在偏振光场导航科学上的研究历史
国内对偏振光导航的研究相对较少、起步比较晚. 孙晓兵等[62]对不同时空的大气光谱偏振数据进行处理和分析,得到了大气偏振特性的时空分布信息. 此项工作为反演大气参数、建立大气散射辐射偏振特性模型提供了素材;褚金奎等[63]对国外偏振光导航的成果进行了深入的分析和研究,提出了一种导航模型的改进方法;马号等[64]提出了基于全天域大气偏振光特性辅助定向自主导航方法,增强了船舰的自主导航性能的同时提高了隐蔽性和抗干扰能力;卢鸿谦等[65]提出了偏振光/地磁/GPS/SINS 组合导航方法,推导了三维空间中应用偏振光/地磁辅助测姿原理,证明了系统具有完全能观性,指出了观测结构具有退化现象和退化条件,并采用联邦Kalman 滤波方法实现了组合导航算法,利用Matlab 仿真方式对单独使用偏振光和同时使用偏振光/地磁辅助的组合导航系统的测姿修正效果和能观度改善效果进行了检验和比较;范之国等[66]根据沙蚁复眼中特殊的偏振敏感神经元结构,提出了一种仿沙蚁POL 神经元的偏振信息检测方法,并设计了检测系统;Cheng 等[67]基于Mie 理论推导出了由水滴引起的散射光偏振度的数学表达式,在给定散射角和水滴尺寸的条件下,计算并分析了可见光不同波段的最大偏振度;Chu 等[68]研制出了一个敏感偏振的测角传感器,并对其性能进行了分析与测试,如图4 所示.
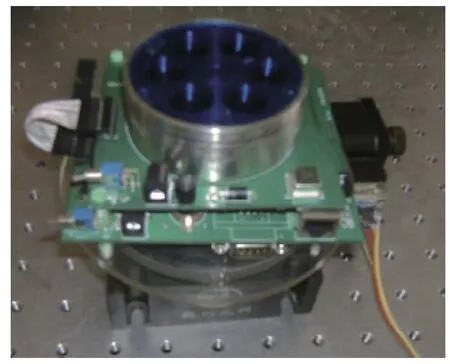
图4 敏感偏振光的测角平台
晏磊等[69]、Wu 等[70]、Guan 等[71]通过多角度偏振遥感理论与实验研究证明了大气和天空光的偏振特性,通过全天空偏振测量方法分析了天空偏振光分布情况,初步判定天空偏振度分布围绕几个偏振中性点呈环状分布. 对可见光不同波段天空偏振光的分布进行了测量研究,结果表明晴朗天空的偏振度随着观测波长的增大而增大,而多云天气条件下长波段对偏振度衰减影响较大,短波段相对稳定,这表明蓝波段是最适用于偏振光导航的探测波段. 同时,提出用太阳方位角修正太阳子午线与载体长轴之间的夹角以获得不变的导航参考方向,这使得偏振导航具有更强的实用性. 并通过研究表明铺道蚁的导航方式可能是在觅食的时候记录下它的步长,作为其运动矢量的模(长度),并根据天空偏振模式图来确定其运动矢量的方向,从而得到其与巢穴之间准确的矢量关系[70,72-73].
6 静电矢量场定位导航
静电场定位导航是目前为止世界上最高精度的INS,基于静电场的自然性状,这里也列入场导航广义范畴. ESG 是世界上最高精度的惯性器件,其精度可达4.4×10-2角秒/年,基于静电场的ESG 可用于深空探测定位导航,具有很高的精度.
6.1 静电陀螺仪及静电支承原理
ESG 又称静电支承自由转子陀螺仪,由球形转子、陶瓷壳体组件、读取系统、静电支承系统、钛离子泵、起动线圈和定中线圈以及屏蔽罩几部分组成. 由于ESG 是利用静电场的静电力将高速旋转的球形转子支承在超高真空的球腔里,而且采用光电传感器或质量不平衡调制法拾取姿态信息,因此消除了机械支承所固有的摩擦力矩、弹性力矩以及液体或气体扰动,是目前公认的精度最高的陀螺仪[74]. 不少专家认为,包括激光陀螺在内的光导发光技术不可能完全替代以自旋转子为基础的传统陀螺.目前,很低漂移率(10-4(°)/h 或更低)还要靠ESG 来保证. 用ESG 构成的导航设备,如ESG 监控器和ESG导航仪等,广泛应用于核潜艇、测量船、远程弹道导弹、战略轰炸机和航天飞机上[75-76].
静电支承系统(Electrostatic Suspension System,ESS)是其重要的工作基础,包括陀螺机械结构和静电支承电路两大部分[77]. 球形转子与球面电极之间的间隙很小,当球面电极上接通高电压,而球形转子保持零电位时,由于静电感应的作用,转子对应表面将产生极性相反的电荷,因此转子与球面电极之间就产生了静电吸力. 由于静电吸力的大小与间隙的平方成反比,与极板所加电压的平方成正比,所以当两边的间隙相等时,转子处于平衡状态. 如果沿三个正交轴方向在球形转子外面配置有三对球面电极,当每对电极对球转子的静电吸力都平衡时,则球转子就被静电吸力所支悬而稳定在空间中心位置[78],如图5 所示.
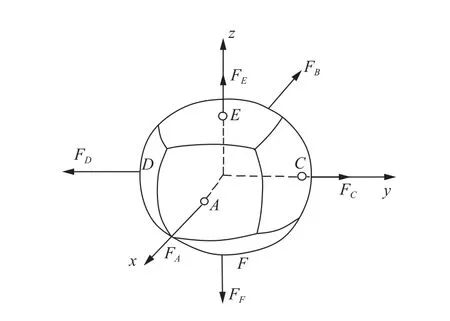
图5 三对静电力支悬球转子
然而,如果电极上所加的电压是不可调节的固定数值,则仍起不到支承转子的作用. 这是因为当转子在重力场内或加速度场内受到力的作用且相对电极产生位移时,对应电极与转子之间的间隙将发生变化. 如图6 所示,当转子沿A、B这对电极的轴线方向即x轴方向位移Δx时,电极A与转子之间的间隙dA变小,电极B与转子之间的间隙dB增大. 如果电极A和电极B所加的电压仍然相同,那么电极A对转子的静电吸力FA因间隙减小而增大,电极B对转子的静电吸力FB因间隙增大而减小,这样转子被吸引到电极A的一边,破坏了静电支承作用. 所以,当转子出现位移时,必须自动调节对应两个电极上所加电压的大小,使间隙变小一端电极上所加的电压减小从而使静电吸力减小,使间隙变大一端电极上的电压增大从而使静电吸力增大,而且电压变化的速度应大于间隙变化的速度,这样才能抑制住转子的位移,使转子回到中间位置而起到支承转子的作用. 只有实现了这种静电吸力的自动调节,才能保证转子的稳定平衡.
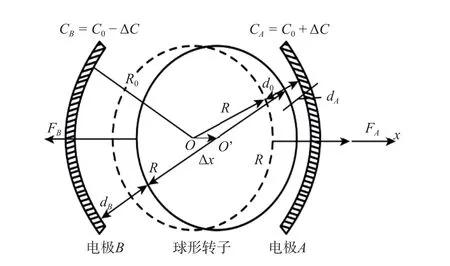
图6 转子球心偏离电极球心
为了在转子产生很小的位移时自动调节电极上的电压从而自动调节静电吸力,首先必须敏感到这个小位移. 然而,在超高真空球腔内,用仪器直接测量这个小位移是十分困难的. 不过,由两极板之间的电容量C=ε0S/δ ( ε0=8.86×10-12F/m)为真空介电常数,δ为极板间隙,S为极板面积)可知,当转子相对电极位移时,电极与转子之间的电容量将发生变化,而且当位移很小时,电容的变化量与转子的位移成正比,所以利用电容传感器精确敏感测量这个电容变化量可间接敏感出转子相对电极的小位移,从而实现对静电吸力的自动调节.
传统的支承控制器采用模拟电路实现超前-滞后控制结构,难以对控制器性能进行优化. 由于支承电极之间的耦合以及电容-位移-支撑力之间的非线性,在起支或转子大范围位移的条件下,对支承系统建立的非线性模型描述十分复杂,难免存在建模不准确、不完善的地方. 同时,转子和支承电极在加工、装配过程中的误差也会带来模型扰动,影响支承系统的性能.
随着嵌入式数字控制系统的引入,针对ESG 的支承控制器设计问题,文献[79]研究了鲁棒控制的方法. 然而可以看出,该类方法仍然难以同时保证控制性能和扰动消除性能的最优. 文献[80]提出的自适应逆控制(adaptive inverse control,AIC)将自适应信号处理的方法引入到自适应控制中,为控制系统的设计开辟了新的途径. AIC用自适应滤波方法辨识出被控对象的逆模型,作为开环的控制器;并将动态特征控制和扰动消除控制独立进行,互不影响,可以同时保证控制与对象扰动消除的性能. 文献[81]以转子位移为被控制对象,利用模糊径向基函数神经网络进行建模,克服传统控制方法的缺陷.
6.2 陀螺在静电场中的悬浮支承回路
ESG 的支承回路分为无源静电支承和有源静电支承两类.
6.2.1 无源静电支承
图7 是无源型三轴静电支承回路的原理示意图.利用正六面体电极与转子间形成的六个电容CA、CB、···、CF与六个电感LA、LB、···、LF组成六个串联谐振回路,并用三相交流电供电. 采用三相供电保证了球转子的虚接地而无引出线.
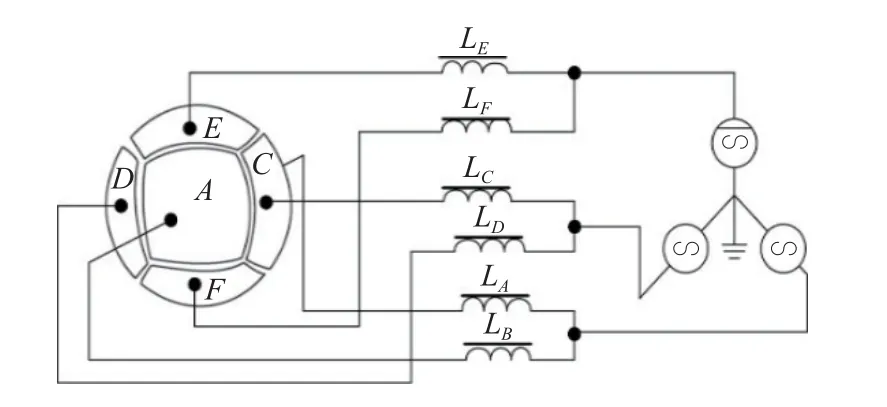
图7 无源型三轴静电支承回路的原理示意图
图8 是单轴(即一个通道)无源支承回路原理图.图9 为单轴支承电压与频率及间隙变化的关系曲线.当转子处于两个电极的中间位置时,两个电极与转子之间的电容相等,即CA=CB=C0,若两个电感也相等,即LA=LB=L,则两个谐振回路的谐振频率为

图8 单轴无源支承回路原理图
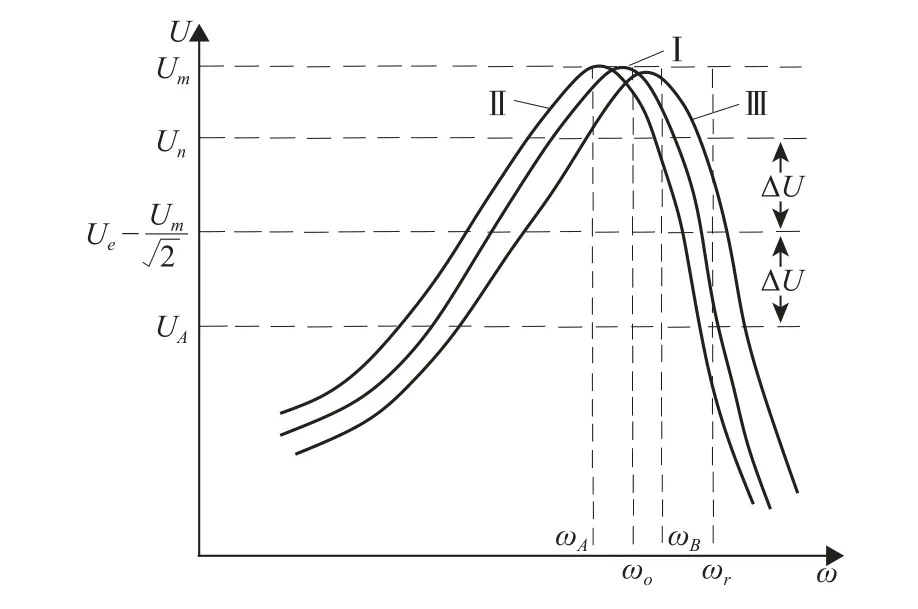
图9 单轴支承电压与频率及间隙的关系曲线
适当选择参数,使谐振频率 ω0略小于电源频率ωr,同时使加到两个电极上的电压U0为谐振电压Um的倍,也就是选择谐振电压曲线的第二半功率点作为支承回路的工作点. 这时,加到两个电极上的电压是相等的,起到预载电压的作用.
当转子受干扰力的作用产生一个很小的位移,例如向电极A的一边位移到Δx时,则电极A与转子之间的电容为CA=C0+ΔC,电极B与转子之间的电容CB=C0-ΔC,电容CA增加使电路谐振频率 ωA减小,电容CB减小使谐振频率 ωB增大,即:
由于两个回路的谐振频率发生变化,使得电极A对转子的静电吸力减小,电极B对转子的静电吸力增大. 这样,就产生了支承力来克服干扰力,起到支承转子的作用. 由于球转子处于真空中,因而在串联回路中还要接入饱和电抗以引进阻尼,使转子避免激烈的振荡.
采用无源型静电支承的优点是线路比较简单,装置的结构比较紧凑. 其缺点是支承能力和支承刚度较低,它适用于船舶和其他冲击加速度不是很大的运动体上[82].
6.2.2 有源静电支承
有源静电支承控制回路的原理如图10 所示. 它是一个轴向的支承控制回路,其他两个轴向的支承控制回路也与此相同.

图10 有源静电支承控制回路原理图
电极A与B和球转子之间的电容CA、CB,同两个固定电容C1、C2组成敏感电桥的桥臂.e1是这个敏感电桥的低压高频电源,其工作频率通常为1 MHz~2 MHz.C3和C4是高压隔离电容,它把加到两个电极上的低频高压与敏感桥路隔离开来.
当球转子处于两个电极的中心位置时,两个电极与转子之间的电容相等,即CA=CB=C0,敏感电桥无信号输出,控制回路的电子线路也无控制电压输出.由控制回路的低频电源e2给出固定电压V0加在合成变压器TC次极的中心抽头上,该电压经功率放大器AA和AB进行功率放大后,推动高压输出变压器TA和TB. 变压器TA和TB输出的低频高压U0经高频隔离网络C5、L5和C6、L6,分别加到电极A和电极B上作为预载电压. 网络C5、L5和C6、L6是并联谐振在敏感电桥电源频率上的,以便隔离敏感电桥的高频信号,使之不影响高压输出变压器TA和TB的工作.
当转子在干扰力的作用下产生一个微小位移时,例如向电极A的一边位移Δx时,电极A、B与转子之间的电容变成为CA=C0+ΔC和CB=C0-ΔC,这时敏感电桥失去平衡而有信号输出. 这个高频信号经控制回路的电子线路进行高频交流放大、解调、滤波、直流放大、网络校正、低频调制、带通滤波和低频交流放大后,输出一个低频控制电压ΔV加到合成变压器TC的初级上. ΔV和V0的频率相同,这两个电压在合成变压器TC中进行合成,TC次极的输出电压分别为:
电压VA和VB分别经功率放大器AA和AB进行功率放大后,推动高压输出变压器TA和TB. 其次极的输出分别为:
它们分别加到A和电极B上,使电极A上的电压减小,对转子的静电吸力相应减小;电极B上的电压增大,对转子的静电吸力相应增大,从而起到稳定支承转子的作用[83].
有源静电支承系统的优点是工作频带宽,支承刚度和承载能力较大. 缺点是线路比较复杂,且采用高压输出变压器使结构尺寸增大. 这种形式适用于冲击加速度较大的运动体[84].
7 结 论
地球自然场定位导航在深空深地深海科学研究中占有重要的地位,在空间应用中的基本要素即位置和方位(Where),以时间空间四维方位表达. 该研究阐述了多种自然场定位导航方法的原理和研究进展,旨在为相关科学研究及应用提供较为全面的理论和技术方法.
该研究强调自然矢量场定位导航的理论性、基础性和实用性,主要包括针对重力场、地磁场、地形地貌高程场定位导航原理,与地球万有引力、地球自转的牛顿力学相对应,偏振场定位导航与太阳入射光波能量场效应结合,以及静电场定位导航并与相对论空天效应验证结合,由此形成较为完整的理论技术体系,解决了地球矢量场定位导航系统各环节的数学物理本质问题. 是我国在定位导航领域源头创新的重要基础和工程实施的重要参考,也为我国深空深地深海探测提供科学进步的重要基础.
针对我国建立从深空到深海,地面到地下安全可靠、高效便捷、无缝连接的综合时空体系,研究和应用地球自然矢量场实现定位导航特别重要. 尤其是利用水下重力、地磁和地形进行定位导航,对于我国开展海洋研究和维护海洋权益,加强国防建设都具有特别重要的意义. 针对我国深空探测战略,仿生偏振导航和ESG 导航是跨越了牛顿力学的与自然光场的作用和爱因斯坦相对论效应验证相关的新方法新手段,具有中国独特的知识产权,也是我国未来深空探测的重要物理基础环节.
地球自然矢量场定位导航技术未来研究和应用前景广阔,其发展趋势如下:
1)传感器性能进一步提升:通过提升磁传感器、重力传感器、偏振光传感器等传感器精度,提高地球自然矢量场导航系统的整体性能.
2)检测信息量进一步综合:地球自然矢量场导航和定位系统的发展依赖于高精度多维信息库的构建. 通过融合地磁、重力、地形地貌高程等多维信息库,有助于实现更精准、可靠和智能的地球自然矢量场导航系统.
3)自然矢量场进一步创新:前期的矢量场主要基于天然信息,如重力、磁力、地形地貌高程场等;后期逐步过渡到间接信息场和人工信息场,如依赖太阳光的偏振场和依赖电学理论的静电场. 在不远的将来,量子场、引力波场等矢量场也将被逐步创新应用,从而为更广阔、更精密、更泛在的宇宙空间导航和定位服务.