地球重力场定位导航方法研究
2024-01-12汲万峰李程刘思远徐遵义
汲万峰,李程,刘思远,徐遵义
( 1. 海军航空大学航空基础学院, 山东 烟台 264001;2. 中国兵器工业导航与控制技术研究所, 北京 100089;3. 山东建筑大学计算机科学与技术学院, 济南 250101 )
0 引言
地球形状的不规则性和密度的不均匀性导致地球各点的重力场并不相同,表现为空间位置(经度、纬度、高度)的函数[1]. 因此潜航器在航行过程中可以通过重力测量仪器进行采集途径航线的重力数据,并将其与预先存储的重力数据进行匹配,以获得潜航器的当前定位信息,从而校正惯性导航系统(inertial navigation system,INS)的累积位置误差. 重力辅助导航系统在测量重力场数据的过程中可进行无源、隐蔽的导航定位,即无需潜航器接近甚至露出水面,测量仪器也不需要发射或者接受外部信号. 因此卫星或无线电定位系统在出现故障或被破坏的特殊情况下,潜航器仍然可以实现自主隐蔽导航.
目前,INS 是水下运载体的核心导航系统,但由于INS 存在定位误差随运行时间增长而积累的问题,必须采用其他外部信息定期对INS 进行修正,即辅助导航技术. 重力辅助导航技术利用运载体上安装的能精确测量地球重力场的传感器和精确的地球重力场图,利用现代最优控制理论和方法定期确定运载体的位置,是修正INS 的技术途经之一,特别适用于海洋水下潜航器[2-5].
重力辅助导航系统的基本原理,是载体在运动过程中,重力传感器实时测量重力特征数据;同时,根据INS 的位置信息从重力图中读取重力数据;然后将这两种数据送给匹配解算计算机,利用匹配解算软件进行解算,以得到最佳匹配位置. 利用该信息对INS 进行校正,可起到抑制INS 误差,提高导航精度的作用[6-8]. 因此,重力辅助导航系统主要包括重力仪、重力场模型和重力数据处理,重力图匹配理论与匹配算法以及各种系统误差的校正理论与方法.
1 基于无源重力场的辅助惯性导航模型
1.1 INS 的基本原理
INS 的基本原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,且把它变换到导航坐标系中,就能够得到在导航坐标系中的速度和位置等信息,捷联惯性导航系统(strapdown inertial navigation system,SINS)原理如图1所示. SINS 由捷联式加速度计组、陀螺仪组和导航计算机组成,把加速度计和陀螺仪直接安装在运载体上,将所有导航信息经导航计算机处理给出.

图1 SINS 原理方块图
在惯性空间中有两种力决定运载体的运动,这就是重力和惯性力. 惯性力与运载体质量之比称之为比力,即
比力矢量的单位为 m/s2,INS 的比力通常由推力、举力、阻力和其他力引起,是INS 中的一个基本概念. 加速度计测量的是运载体相对惯性空间的比力fb,陀螺仪测量的是运载体相对惯性空间的角速度,根据导航系统选用的坐标系需要将进行相应变换.
导航坐标系采用地理坐标系时(n系,E、N、U)INS 的基本方程为
惯性导航通常分为四个阶段:标定、对准、状态初始化和当前状态计算.
标定是由于加速度计和陀螺仪存在误差,在开始进行导航之前,通过对加速度计和陀螺分别进行标定,确定加速度计和陀螺仪敏感的比力和旋转速率与实际的比力和旋转速率之间的关系. 标定要在表观重力矢量值和地理位置确定且非常精确的地点进行,以便提供正确表达加速度计和陀螺仪输出的系数.
对准是在导航开始时确立每个加速度计输入轴的方向,即将加速度计-陀螺仪组合体对准到当地表观重力矢量(摆的天文垂线方向)和天文北(接近地球自转轴的方向),以便导航计算机确定坐标变换,将加速度计的输出转换成导航计算机的坐标.
状态初始化是向计算机提供初始位置和速度值(如果不为零),进行计算机积分运算的初始化. 初始位置可从事先的大地测量或从GPS、BDS 获得,地速通过惯性设备外的某种测量装置获得.
1.2 重力/INS 组合导航系统
由INS 基本原理可知加速度计测量的是比力,即惯性加速度与重力向量之差. 为了区分载体运动的惯性加速度和重力加速度,惯性导航仪器必须有重力场的数学模型,传统INS 重力计算如图2 所示. 目前,重力异常是高性能INS 的最大剩余误差,对于舰船导航系统,重力异常分量约有30~50 mm/s2的偏差.因此,为了提高INS 的精度,除不断改进重力场数学模型外还希望能实时获取舰船所在位置的重力场值.
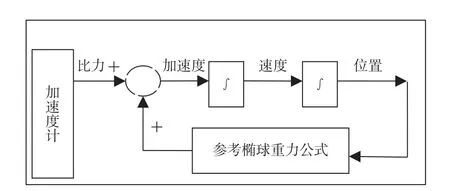
图2 传统INS 中重力的计算
综合以上分析,我们可以得到导致INS 产生误差的主要原因有以下几点:
1)舰船航迹上重力异常;
2)惯性传感器随机漂移误差;
3) INS 初始对准误差;
4) INS 由原因1)、2)以及计算产生的累计误差.
水下运载体规划航迹穿越重力异常匹配区,重力异常显著,标准差在10 mm/s2以上(目前重力异常图误差在5~8 mm/s2);水下运载体进入重力异常匹配区时作近似定深匀速直线(东西向或南北向)运动;利用重力仪或者重力梯度仪的测量结果修正INS 采用的重力场模型和INS 传感器随机漂移误差;通过重力图匹配,修正INS 位置误差(初始对准误差、累计误差).
由于INS 通常安装在水下运载体的质心位置,可根据实际情况将重力导航设备与INS 共用一个稳定平台、相邻安装或采用INS 平台参数而安装在其他合适位置.
如图3 所示,匹配解算计算机接受来自载体运动过程中重力传感器测量的实时重力特征数据和根据INS 的位置信息从重力图中读取到重力数据,并利用匹配解算软件进行解算,求得最佳匹配位置. 利用该信息对INS 进行校正,可起到抑制INS 误差、提高导航精度的作用.

图3 重力辅助INS
2 基于无偏Kalman 滤波理论的重力场匹配算法
重力场导航算法是整个重力辅助导航系统的核心,它的输出用来修正INS,限制INS 误差随时间积累,甚至发散. 水下航行的低速特点和重力异常地图分辨率低是影响地图匹配精度和稳定性的关键因素.传统Kalman 滤波理论、扩展Kalman 滤波(extended Kalman filter,EKF)理论及其在水下重力INS 匹配导航中的应用,可以给出EKF 滤波器的水下重力异常匹配算法;同时,EKF 也曾是应用最广泛的解决非线性问题的次优近似方法. 但是,EKF 仍存在如下不足:1) 当非线性函数的泰勒展开的高阶项不能被忽略时,线性化会导致系统出现显著误差,甚至使滤波器难以稳定;2) 在许多实际问题中,很难得到非线性函数的雅克比矩阵求导;3) EKF 需要求导,所以必须清楚地了解非线性函数的具体形式,并且无法作到黑盒封装,从而使其难以模块化应用. 目前,虽然对EKF有众多的改进方法,如高阶截断EKF、迭代EKF 等,但这些缺陷仍然难以克服[9-13].
使用采样方法近似非线性分布来解决非线性问题最近受到了广泛的关注,这是因为近似非线性函数的概率密度分布比近似非线性函数更容易,其中无迹Kalman 滤波(unscented Kalman filter,UKF)就是用一大类用采样策略逼近非线性分布的方法. UKF基于无损变换(unscented transformation,UT),采用Kalman 线性滤波框架. 具体的采样形式是确定性采样,采样粒子点(一般称为Sigma 点) 的数量非常少,具体数量取决于所选的采样策略. 最常用的是2n+ 1个Sigma 点对称采样. UKF 算法具有如下特点:1) 近似非线性函数的概率密度分布,而不是近似非线性函数;2) 非线性分布统计量的计算精度应至少达到2 阶,对于采用特殊的采样策略可达到更高阶精度;3) 计算 Jacobian 矩阵不需要求导;4) 可处理非加性噪声情况和离散系统,扩大了应用范围;5) 计算量与EKF 同阶次;6)采用了确定性采样策略,可避免粒子衰退问题. 总之,UKF 的计算量基本与EKF 算法相当,但性能优于EKF,在非线性状态估计领域已展现出比标准EKF 估计方法更为广泛的应用前景.
本文分析基于UKF 的重力/SINS 组合导航方法.状态方程采用INS 基本误差方程,测量仍采用重力仪实测重力异常与SINS 指示位置处重力异常图给出值之差. 由于地球重力异常是地球平面位置的非线性函数,导致SINS 位置误差、速度误差和姿态误差也表现出非线性特征.
2.1 UT 基本原理
UT 基于先验知识:近似非线性函数的概率密度比近似其函数更容易. 假设随机变量x为n维向量,其均值和协方差分别为和Pxx,要预测m维随机变量ψ的均值和协方差Pyy,y与x的关系由以下非线性变换定义
图4 UT 原理
通常,UT 算法(可应用于任何Sigma 采样策略)框架的步骤如下:
1)选择一种Sigma 点采样策略,根据输入变量x的统计量和Pxx,得到输入变量的Sigma 点集{χi},i=1,2,···,L,以及对应的权值和,其中,L为所采用的采样策略的采样Sigma 点个数,为均值加权所用权值,为协方差加权所用权值.
2)对所采样的输入变量Sigma 点集 {χi} 中的每个Sigma 点进行f(·) 非线性变换,得到变换后的Sigma 点集 {yi} .
3)对变换后的Sigma 点集 {yi} 进行加权处理,得到输出变量y的统计量和Pyy. 具体的权值仍然依据对输入变量x进行采样的各个Sigma 点的对应权值
经UT 后得到的和Pyy的近似值为
式中: ε为x在x¯ 的邻域偏值;f(i)(·)为x在值x¯ 处的i阶偏导值.
在UT 算法中,最重要的是确定Sigma 点采样策略(使用Sigma 点的个数、位置及相应权值). 目前有多种Sigma 点采样策略,如对称采样、单形采样、3 阶矩偏度采样以及高斯分布4 阶矩对称采样等,本文选择应用比例修正框架的比例对称采样.
2.2 UKF匹配算法
在Kalman 滤波算法中,UKF 算法就是对于一步预测方程,使用UT 来处理均值和协方差的非线性.基于UKF 的重力场匹配算法共分为四个部分:
1)选择系统状态和协方差矩阵的权
式中:ns为系统状态数目; β 为引入f(·) 高阶项信息的参数,当不使用f(·) 高阶项信息时 β=2 ,对于高斯分布 β=2 是最优的; α 为大于零的比例缩放因子,调节Sigma 点与x¯ 的距离亦即用来确定x¯ 周围Sigma 点的分布可通过调整 α 的取值来实现,通常设为一个较小的正数( 10-4≤α <1 ); λ 是由两个用户指定的常量相关的比例参数,计算公式为
式中, κ 为度量Sigma 点分布的峰度,通常设置为0 或 3-ns.
2)建立Sigma 点集{χi}
(3)系统预测方程:
(4)更新方程
2.3 系统状态方程和量测方程的建立
选择载体航迹及INS 可能的误差域(3 σ )所在匹配区进行重力异常建模,经反复实验可得点质量模型为:点质量点数3;位置分别为 λj=122.918751 、φ1=24.142241、φ2=24.275575 和φ3=24.408908 ;对应点质量分别为( ×1016kg)M1=-2.4774、M2=2.4836和M3=0.4568 ;深度为Dj=40 km . 将上述数据分别代入点质量模型,即:
式中: δga为重力实时测量系统误差;R=Re+hi,Re为匹配区向径或地球平均半径,hi为载体高程. 由此可得系统量测方程为
式中: Δgs(λ,φ) 为INS 指示位置处实测重力异常;ΔgM(λ+δλ,φ+δφ)为INS 指示位置对应重力异常图上获取的重力异常;为INS 位置误差.
3 重力辅助导航动态测量系统
重力测量分动态测量和静态测量. 动态重力测量是针对在动机座上的重力测量技术,其测量方法又可分为标量和矢量重力测量. 矢量重力测量还处于发展阶段[14],本文重点介绍动态标量重力测量系统. 标量重力测量只测量垂向重力加速度,重力加速度传感器只对轴向加速度敏感,安装在稳定平台上,稳定平台隔离运载体的旋转和振动,保证重力加速度传感器敏感轴始终垂直地面.
3.1 重力动态测量的信号处理
动态重力测量数据的精度由两方面定义:一是重力敏感数据的精度;二是运动载体的位置精度[6]. 水下导航重力测量与重力测绘不同,是由实时测量的重力数据通过与参考重力异常地图匹配获取运载体位置估计. 因此水下导航重力测量的信号处理主要是提高重力敏感数据精度,并从敏感数据中实时提取重力异常数据.
标量动态重力测量是获取垂直加速度信息,把重力敏感元件安放在稳定平台上,保证敏感元件轴始终与当地大地水准面垂直;其次,需要保证敏感元件只输出敏感轴轴向加速度信息.
典型的动态标量重力测量系统有Graf 公司的KSS31 和LaCoste & Romberg 的S 型和Bell Aero-Space 公司生产的BGM-3 型海洋重力仪. BGM-3 海洋重力传感器如图5 所示,在水平位置设置横向弹簧限制敏感质量在水平方向的移动,迫使其只做垂直运动,消除了加速度的交叉耦合影响.
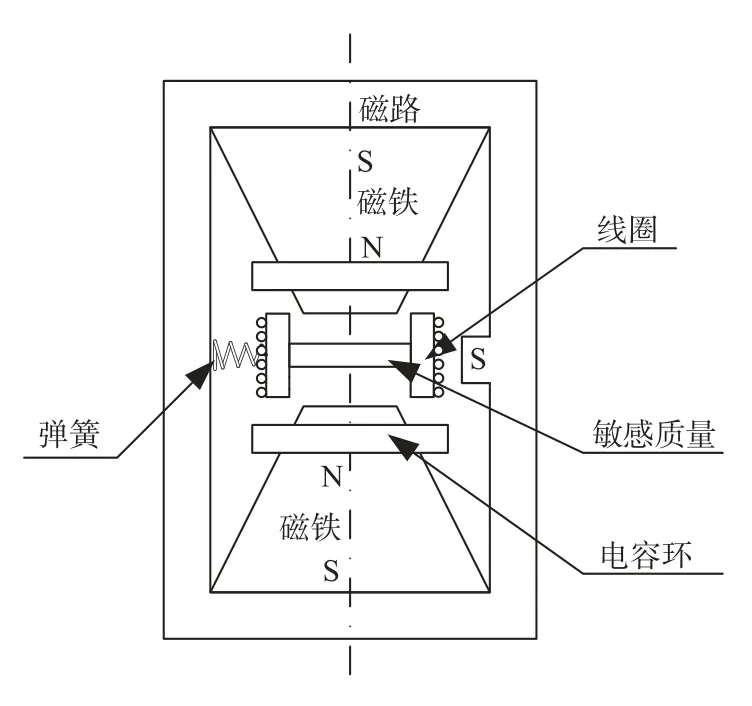
图5 BGM 力平衡加速度计结构示意图
在运动载体上的重力敏感在得到重力加速度的同时,还敏感到运载体的运动产生的垂直加速度. 这些加速度甚至可以达到几十厘米每平方秒,是主要误差源. 在得到重力异常值之前必须消除这些误差.
运载体的运动对重力仪的干扰可分为垂直加速度、稳定平台的偏转和Eötvös 效应三方面. Eötvös 效应指运载体相对地球的运动对重力测量的影响.
对重力信号进行处理以获取高精度量测值的研究,国内外都开展了大量的工作. 国外各动态重力仪生产厂家和相关实验室的研究认为,对于大部分噪声低通滤波是有效的. 中科院测量与地球物理研究所王建弟讨论了用Kalman 反滤波消除动态重力测量畸变的问题. 在建立状态方程中,他使用了一个二阶Gauss-Markov 过程表示地球重力异常协方差模型.东南大学赵池航探讨了用小波分析处理重力仪数据的方法,其主要观点是低通滤波会导致输出信号的失真,因此用小波对采集到的重力信号进行分解,小波系数小于某个阈值的都被设为0,再对信号重构,得到即为原重力信号[15-16].
这些方法是针对以重力异常测绘为目的的测量提出的. 重力敏感数据被记录,然后在实验室进行处理;而一般的平均滤波线性范围小,滤波的同时重力信号本身会产生畸变. 在实时信号处理方面存在缺陷,本文提出一种采用有限冲击响应(finite impulse response,FIR)数字滤波器,保证滤波器的稳定性和相位的线性,实现信号的实时处理的方法.
其他误差需要外部测量才能进行补偿. 稳定平台的偏转使运载体的水平加速度耦合到重力仪输出端,需要稳定平台的偏角的实时估计;Eötvös 效应的修正需要运载体速度的估计.
在重力测绘中,Eötvös 效应修正依赖可靠的连续定位如GPS,给出运载体的速度观测;也可利用测线的交叉点的重力测量差异进行Eötvös 效应的修正;在陆地测量时有零速修正法. 但这些方法都不能满足水下导航重力测量的实时性要求. 在分析Eötvös 效应模型的基础上,提出基于重力异常参考地图的Eötvös 效应修正模型.
3.2 重力动态测量的重力异常计算
重力异常是由引起大地水准面偏离参考椭球面的质量分布产生的. 已发布的重力异常的数值几乎都是以海平面为基准的. 同样在水下重力导航中,给定的参考地图是重力异常地图,重力数据须转换为重力异常数据,才能与参考地图进行匹配.
重力异常的基本计算流程如图6 所示.

图6 重力异常计算流程
陆地重力测量通常在海平面以上进行,这时当它减去椭球面上的正常重力值而获得重力异常以前,必须先将观测重力值改正成海平面的等效重力值.
为了获得海平面上的等效值,可以在多种假设基础上对观测值进行改正,虽然这些假设中没有一种能真正反映实际情况. 自由空气改正是只对测点高度进行改正,从而将观测值改正到海平面上. 布格改正是将海平面以上的质量影响从观测重力值中减去,从而根据这些质量不存在这一假定来把重力值改正到海平面上. 均衡改正是将海平面以上的质量影响去掉,然后在直接向下的深度上重新引入,从而消除补偿地形的山脉的“根”(或洋盆的“山根”).
由自由空气改正可以得到自由空气异常;布格改正后可得到布格异常;均衡改正对应均衡异常.
由于人们对海底地形的了解不如陆地地形,现有的海洋重力异常地图都是自由空气异常. 水下重力测量的测点低于大地水准面,重力异常计算模型与陆地重力异常计算模型不同. 现有的计算模型,一种是在陆地自由空气计算模型的基础上增加海水的层间改正计算;另一种是进行重力梯度标定,得到深度改正值. 第一种方法在理论上不完备,第二种方法在水下导航中无法实现. 本文从重力异常定义出发,改正正常重力模型到测点,计算重力异常值. 该方法基于海底三维正常重力模型的建立.
4 重力测量干扰处理方法
针对上文中水下动态重力测量的垂直加速度、水平加速度和Eötvös 效应三方面干扰来源. 介绍其产生机理、模型建立以及处理方法.
4.1 重力动态测量垂直加速度干扰处理方法
运载体的垂直加速度直接被重力加速度传感器敏感,是重力测量中的重要误差源.
运载体的垂直加速度av可以分为常值avc和周期信号两部份.
式中,avo和fvo分别为周期垂直加速度的幅值和频率,上标i表示第i个频率成份.
常值部主要由水下运载体做加速上升和下潜运动产生的,在通常情况下,此时不采用重力仪的量测值进行辅助导航.
水下运载体在定深航行时,因洋流而产生垂直方向周期性运动. 这部分运动与运动载体本身的振动不同,不能被重力仪机座的机械低通滤波所去除. 观测表明认为,它的幅值可以达到5~10 cm/s2,频率范围是0.05~0.5 Hz.
为有效滤除垂直方向的周期性加速度干扰,需要探讨干扰信号于重力加速度信号在频域成份上的差异. 干扰信号的频域范围通过观测在0.05~0.5 Hz 之间.
重力加速度频率成份与重力场分布有关,其空间频率成份是固定的. 对于重力测量系统,需要的是重力关于时间的频率成份. 重力场空间频率fsm向时间频率ftm的转换,由式(15)定义.
式中,nd是重力异常参考地图的网格间距.
其频率与速度和参考地图的分辨率相关,关系如图7 所示.

图7 重力信号频率与运载体速度和参考地图分辨率关系
为了在滤波中区分出干扰加速度和重力加速度,需将两者的频率成份区分开,由此得到的干扰信号频率ftm与重力信号频率fvo必须满足
系数取1/2 是防止滤波时频率之间出现混叠(由Shannon 采样定理可知),在实际应用中分母通常取2.5.
则航行速度受到地图分辨率的限制,地图分辨率的单位为m,速度用国际标准单位(m/s)和节(n mile /h)分别表示. (1 n mile=1852 m)
FIR 数字滤波器的实现就是用某种方法逼近理想滤波器特性,这些方法有插值法、最小平方逼近法和一致逼近法. 它们分别代表了在数值逼近中不同的逼近准则.
Chebyshev 逼近理论证明了模型的存在性和唯一性,并提出p(x)的构造方法. 其后,McClellan, Parks和Rabiner 等人应用Chebyshev 的理论提出了FIR数字滤波器的计算机辅助设计方法. 该方法在通带和阻带都具有等纹波的性质,并且能精确控制纹波峰值,其低通滤波器的设计参数包括低通滤波器的截止频率ωs、阻带的下截止频率ωp、通带纹波峰值δ1、阻带纹波峰值δ2和单位抽样响应时间长度N.
由误差源特征分析可知,误差的频率在0.1π~π,在导航过程中通过控制运载体航速使重力异常最高频率成份为0.05π. 在设计低通滤波器时,其截止频率通常取0.05π~0.1π 的值.
4.2 重力动态测量水平加速度干扰补偿方法
如果加速度敏感轴偏离大地垂线方向θ,水平加速度ah在重力加速度敏感轴上产生相应的分量叠加到垂直加速度gv上,得到重力仪传感器输出gsen
可以得到相应的加速度扰动
陀螺稳定平台用来隔离运载体的旋转运动,保证重力仪轴线与当地大地水准面垂直. 由式(18)知,平台偏角的误差会导致水平加速度扰动计算误差的增加,平台偏角估计是水平加速度补偿的关键.
陀螺稳定平台的控制方法是惯性技术的关键技术之一. 稳定平台可以为机载设备提供相对惯性坐标稳定,从而为各种设备的对准提供基准. 本文引用一种稳定平台,介绍其失准角的变化机理,为水平加速度扰动修正提供理论依据.
从式(18)可以看出,稳定平台是在水平加速度的影响下强迫振动,它的频响函数为
式中,输入信号为ah/g.
任何信号都可以按Fourier 转换理解为周期信号和的形式,在重力导航过程中,通常运载体不做机动航行,水平运动的干扰主要形式是周期信号,因此本文只分析周期水平加速度引起的扰动加速度.
由式(19)和式(18)可以得到周期水平加速度引起的扰动加速度gθ的计算公式
不同频率和幅值的水平加速度与扰动加速度幅值之间的关系如图8 所示.
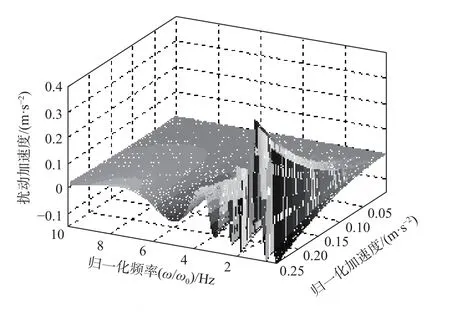
图8 周期加速度引起的重力仪量测扰动常值分量
可以证明在阻尼f=时,这种影响被降到最低.
周期分量为剩余部分,其频率为原水平加速度信号的两倍,对重力仪产生的扰动如图9 所示.

图9 周期水平加速度引起的周期扰动
显然周期性水平加速度所引起的误差主要体现在对重力仪的周期扰动上. 但其频率成份为原水平加速度信号的两倍,所以只要在信号处理中采用低通滤波即可消除它所带来的影响.
如果稳定平台偏角,直接由陀螺仪读数决定,得到的补偿必然包含有陀螺仪的随机误差. 本文在已建立的水平加速度和稳定平台倾角关系模型的基础上,给出用Kalman 滤波的方法得到稳定平台的倾角最优估计. 由该估计值进行误差补偿.
由平台运动微分方程可以得到系统的线性状态方程
又因系统的输入量ah可以分解为真实信号与白噪声之和,w是水平加速度计的量测噪声.则式(11)可写成
系统的量测方程
式中:C=[01];v是陀螺仪量测噪声.
已标定加速度计和陀螺仪的量测误差可以视为白噪声w和v且统计特征已知,也就是说:
4.3 Eötvös 效应的实时修正模型
Eötvös 效应指运载体相对地球的运动对重力测量的影响. 它在重力测量中所产生的扰动加速度δgE可用式(23)定义.
式中:Rφ为当地的地球半径;φ为纬度;ωie为地球自转角速率;h为运载体航行深度;V为运载体航速;Λ 为运载体航向.
式中:F为地球扁率;a为地球长轴半径.
水下运载体的航行深度,从100~1000 m 不等,能在300 m 以下航行的运载体多为无人载体. 按最大航行深度计,式(23)中h/Rφ的值为1.573×10-4. 因此,公式中的第一项可简化为1.
同样,对于水下运载体而言,最大航速约为18 kn(1 kn=1852 m/h),常规航行速度为4~6 kn.V2/Rφ的最大值为,1.3489×10-5m/s2,1.3 mm/s2. 常规航行时约在0.1 mm/s2.
式(23)中的 2ωieVcosφsin Λ 项在运载体按常规航行速度4 kn 计算,最大可达到30 mm/s2. 因此式(23)可简化为以下形式
这里探讨速度、航向、纬度误差对Eötvös 效应计算的影响如图10 所示. 在公式中航向的正弦和速度的乘积是东向速度VE(Ve=Vsin Λ ),把它代入公式后对该函数进行偏微分可得

图10 纬度、东向速度与Eötvös 效应的关系
显然,重力仪的Eötvös 效应改正精度要达到1 mm/s2,速度观测误差δV、纬度误差δφ和航向误差δΛ 应满足
当水下运载体以最大航速18 kn 航行时,纬度和航向角容差可达到0.424°,由此可见,Eötvös 效应改正对速度观测要求很高,而对纬度和航向误差不敏感.
如前所述,水下导航重力测量的导航定位条件有限,由INS 提供的速度观测进行Eötvös 效应修正存在很大的误差.
由于Eötvös 效应对纬度和航向误差不敏感,假定水下运载体保持匀速运动,Eötvös 效应近似于一个常值. 在高频噪声消除之后,该误差仍保留在重力观测数据gE中.
用gE计算得到重力异常值ΔgE包含了这部分误差,用实时测量的重力异常序列ΔgEi值的期望和重力异常参考地图的局部平均值进行比较可以得到Eötvös 效应的修正. 流程如图11 所示.

图11 基于重力异常参考地图的Eötvös 效应修正
实时ΔgE的期望计算模型如所示
5 小 结
重力辅助导航系统主要包括重力仪、重力场模型和重力数据处理,重力图匹配理论与匹配算法以及各种系统误差的校正理论与方法. 本文主要介绍了海洋重力辅助INS 的方法,包括重力场导航方法的实现以及重力实时测量系统的构成,为重力辅助导航匹配算法的进一步研究和工程应用提供了有益的经验.