智慧灯杆高强轻量化方案设计与分析
2024-01-11陶琳,祝愿,孙萌
陶 琳,祝 愿,孙 萌
(宝山钢铁股份有限公司中央研究院,上海 201999)
1 概述
随着城市的快速发展,通信基站、监控摄像头、交通指示牌等城市公共设施的数量迅速增加,由于城市道路空间承载能力有限,各类设施在路灯杆的搭挂需求强烈,路灯杆上搭挂的设施日益增多[1]。智慧路灯以道路照明灯杆为基础,整合公安、交通信号、通信、交通标识牌等为一体,实现多杆合一,减少路面立杆,释放公共空间资源。
目前对于杆体的设计,一是采用力学分析方法进行设计计算:文献[2]以40 m高杆灯为例进行了高杆灯在风荷载作用下的设计计算与校核;文献[3]介绍了一种通过力学分析来验算灯杆强度的模型;文献[4]采用力学分析方法建立路灯灯杆优化函数,并对灯杆的臂厚、直径和挑臂臂长进行优化计算。二是通过有限元分析方法对灯杆在外荷载作用下进行刚度、强度、稳定性和模态分析:文献[5]对8 m铝合金路灯灯杆结构进行有限元计算,分析灯杆在风荷载和自重作用下的应力和变形情况;文献[6]运用ABAQUS有限元软件对10 m太阳能路灯灯杆在风荷载、雪荷载及自身重力作用下各构件的应力与变形进行了分析;文献[7]分析智慧照明A类灯杆在自重、加载设备、风荷载和雪荷载作用下的力学响应,研究其变形、应力及模态情况,并与理论分析值进行比较。
实际应用当中发现,风荷载是影响高杆灯强度的最大也是最关键的因素[2],因此本文仅考虑灯杆自重、附加设施和风荷载作用,对灯杆进行高强轻量化设计,运用有限元仿真分析方法,构建精细化的灯杆有限元模型,对灯杆进行刚度、强度和稳定性分析,验证高强轻量化方案的可行性。
目前智慧灯杆的设计暂无详细规范,主要参考GB 5009—2012《建筑结构荷载规范》和GB 50135—2006《高耸结构设计规范》有关规定进行设计验算。
2 有限元仿真模型构建
2.1 工程概况
某城市主干道某型号智慧灯杆由上杆体、下杆体、横臂和灯头组成。上杆体为方管,长度5 m;下杆体为八棱柱杆,长度7 m;横臂为双根八棱柱杆,长度8 m;灯头为方管做成造型结构,装载灯具用于照明。下杆体安装有显示屏和禁令牌,横臂上安装有交通信号灯。杆与杆的连接处采用焊接和法兰连接方式。主要部件的结构信息见表1。
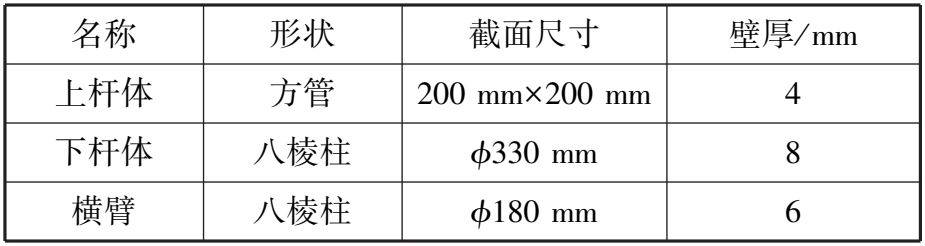
表1 主要部件构造尺寸Table 1 Construction dimensions of major components
2.2 高强轻量化设计
目前市面使用的灯杆材质多为Q235和Q355,强度低,容易变形甚至断裂,高度10 m以上灯杆质量达到600 kg多,安装不方便,且运输成本增加。使用高强钢进行轻量化设计,将主要构件下杆体和横臂的直径增大,厚度减薄,既能有效提高灯杆的承载能力,又能将杆体质量减轻20%以上,利于安装和运输,实现整体成本的降低。高强方案对比见表2。

表2 主要构件高强轻量化方案Table 2 High-strength and lightweight scheme of major components
灯杆模型如图1所示。
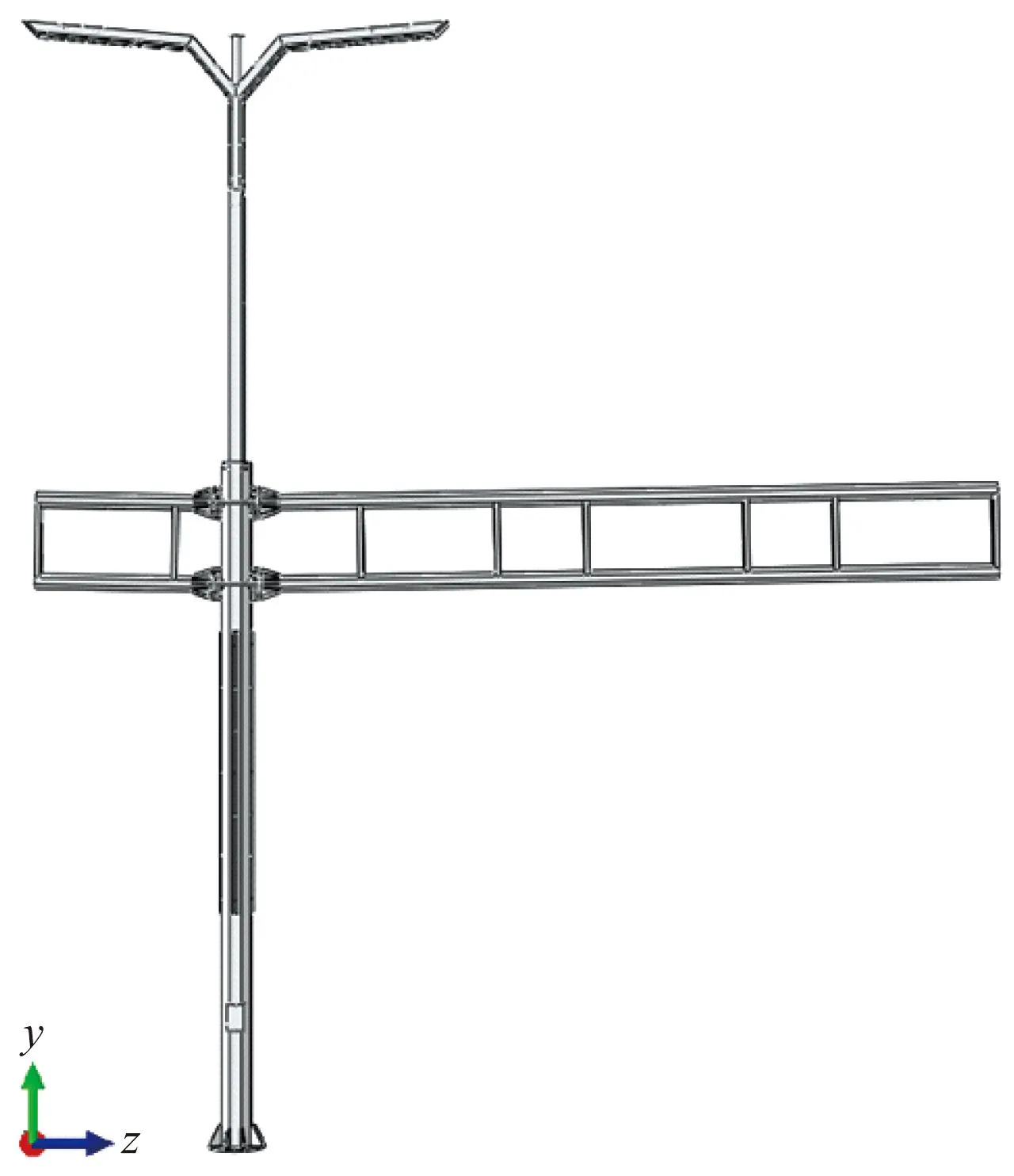
图1 灯杆模型Fig.1 Light pole model
2.3 计算参数的确定
在分析模型中,对灯杆在实际作业过程中受到的荷载进行确认。
(1) 杆体下端通过法兰与地面进行固定约束,杆体与法兰采用刚性连接,法兰约束6个自由度。
(2) 在有限元模型中加载了两种荷载,即永久荷载和可变荷载。永久荷载为杆体自身和信号灯、禁令牌等附加设施的自重,设置材料的重力常数为9.8 m/s2;可变荷载为风荷载,选择承载面最大的方向设为本次分析的风荷载方向,即垂直于横臂的方向,分析模型中的x方向。参考GB 5009—2012《建筑结构荷载规范》,作用在灯杆结构单位面积上的风荷载按式(1)计算:
ω=βzμsμzω0
(1)
式中:ω为作用在灯杆结构单位面积上的风荷载,kN/m2;ω0为基本风压,取当地50年一遇风压0.45 kN/m2;βz为z高度处的风振系数,本项目取1.7;μs为风荷载体型系数,八棱柱取1.2,方形取1.4;μz为z高度处的风压高度变化系数,本项目取1.0。
参考GB 50135—2006《高耸结构设计规范》,分析工况包括:①正常使用极限状态:恒载+风荷载;②承载能力极限状态:1.35×恒载+1.5×风荷载。
3 有限元结果分析
3.1 挠度分析
灯杆新方案不同方向的位移云图如图2所示。灯杆在自重、附加设施和风荷载的作用下,按照正常使用极限状态加载进行分析,产生的最大位移能反映杆体的整体刚度。通过图2可以看出,x方向的最大位移在横臂最前端,其大小为287 mm;y方向的最大位移在横臂最前端,其大小为49 mm,均满足8 000×5%=400 mm的容许挠度设计要求;z方向的最大位移在主杆最顶端,其大小为35 mm,满足12 000×5%=600 mm的容许挠度设计要求。
3.2 强度分析
灯杆在自重、附加设施和风荷载的作用下,按照承载能力极限状态进行强度分析,整体应力云图如图3所示。最大应力为556 MPa,具体位于背风面主杆与检修门连接处,满足620 MPa级别材料的许用应力,符合强度要求。在工况荷载作用下,灯杆除了局部存在应力集中,灯杆主杆和横臂大部分区域的应力远小于许用应力。

图3 灯杆整体应力云图Fig.3 Stress nephogram of the light pole
3.3 稳定性分析
在关注产品结构本身的刚度和强度满足要求和标准的同时,对于细长类结构和薄壁结构,还需要考虑稳定性问题。本文采用灯杆在自重、附加设施和风荷载的作用下,按照承载能力极限状态进行杆体的屈曲分析的方式,对灯杆在外荷载作用下的稳定性进行分析。如图4所示,第一阶屈曲特征值为8.1,远大于1,屈曲失稳概率极低。

图4 灯杆屈曲特征值Fig.4 Buckling characteristic value of the light pole
4 结论
(1) 对某型号智慧灯杆进行高强轻量化设计,在保证承载的情况下,整体轻量化率21%,可以降低综合成本。
(2) 对某型号智慧灯杆在自重、附加设施和风荷载的作用下进行刚度、强度和稳定性分析,在外荷载作用下最大位移在横臂最前端,其大小为287 mm;最大应力位于背风面主杆与检修门连接处,其大小为556 MPa;第一阶屈曲特征值为8.1,远大于1,屈曲失稳概率极低。高强轻量化方案均满足标准要求。
