无人船在拦沙导堤施工水下地形勘测中的应用
2024-01-11周和友张玉明顾永根方怡秋
周和友,张玉明,顾永根,邱 征,刘 广,方怡秋
(1.安徽省交通航务工程有限公司,合肥 230041;2.合肥工业大学 土木与水利工程学院,合肥 230009)
在拦沙导堤施工过程中, 导堤形态关系着堤体受水流冲刷破坏的影响程度[1],因此勘测拦沙导堤水下形态,及时反馈拦沙导堤的断面形状,从而对抛填过程中的欠填部位进行及时补填,确保施工质量。水下地形的测绘主要结合定位和水下深度的数据至关重要[2], 通常采用全球卫星导航系统定位方法(GNSS), 或者传统的光学定位方法和无线电测量定位方法等去实现。测绘水下高程可通过测量水深实现水下高程的计算,传统方法采用测深锤、测深杆实现深度测量,通过读取刻度获得水深数据,但由于单点测量工作量大,测量不均匀,且易受人工操作影响[3];也可采用单波束测深仪, 通过声呐回声探测水深,但水深深度变化较快情况下会导致测量结果精度低;相较之下多波束探测仪测点精度高[4],覆盖密度大,工作效率得以改善。当前水下地形测量方法结合现代化技术,如无人测量船和机载激光测量等应用在工程实践中日益优化[5],测区范围限制小,自动化精确度高。
本文基于引江济淮航道拦沙导堤工程中兆河口无人测量船技术勘测案例, 结合无人船搭载测深仪和RTK 获得测区的水深和高程数据,对该区拦沙导堤的抛填水下断面形态作出分析, 为类似导堤抛填过程中水下地形勘测工程的理论与实践研究提供科学依据。
1 无人船技术
1.1 无人船应用进展
无人船作为水面最典型的智能平台系统, 在内河级、 海工级和海防级均已实现了多行业应用与发展,如城市内河水质在线监测[6],搭载监测传感器的无人船,基于设定航行路径走航监测取样,进行污染团定位、排污口探测、污染物参数调查,为水污染防治提供数据支撑;海洋环境调查观测[7],搭载仪器设备的无人船获取水深定位数据, 用于水下地形地貌测绘,及海洋地球物理指标、海洋生化指标等监测;海洋巡查执法[8],当前无人船货运应用处于发展初期,随着我国无人船跨域货运航线试点相继开通,未来无人船将在航运业不断由自动化向智能化演变。
1.2 无人船系统结构
本项目导堤施工水下地形现场勘测作业采用的是科微智能C100X 小型水面无人船,(如图1),常用于内陆湖泊、 河流、 水库等水文测流与水下测绘工作。船体结构采用双M 型设计,全船自重20 kg,具有重心低、阻力小、航行稳、易携带的特点,同时船头上的标配摄像头可用于查看施工区域水质状况, 以及双玻璃钢天线+遥控器双玻璃钢天线的设计,使得信号传输更稳定。船体载设计荷承重达10 kg,可根据项目需求搭载声呐、 声学多普勒流速剖面仪(ADCP)、测深仪等设备。

图1 C100X 小型水面无人船
1.3 无人船水下地形测量原理
水下地形勘测主要任务为确定测量点水底的三维坐标, 无人船搭载的测深仪连接超声换能器可以测得行经点所在位置的水深数据,RTK 输出定位经纬度信息,二者数据相结合得到水下点位三维坐标。无人船自动行驶过程中,GNSS 用户设备为测量提供位置信息,定位精度达到厘米级。
2 无人船技术应用
2.1 测区工程背景
引江济淮工程(安徽段)巢湖湖区航道及派河口服务区工程, 是引江济淮发展江淮航运的重要枢纽工程。 航道两侧设置拦沙导堤是巢湖湖区航道疏浚工程和整治工程的重要组成部分, 其中兆河口门项目区地貌单元为沿江丘陵平原, 地貌亚区为江北丘陵波状平原,微地貌单元为岗地,局部为坳沟,地面标高在4.36~6.01 m 之间,地势平坦。针对巢湖湖区较为敏感的生态环境, 初步设计使用充砂管袋堤心斜坡堤或抛填人工砌块斜坡堤方案。 抛填过程中可能存在抛投船移位间距过大,出现块体抛填不均匀,甚至出现空缺的情况。 图2 为无人船在施工现场进行水下地形测量。 无人船技术水下地形现场勘测作业可作为施工作业的辅助技术, 反映导堤水下抛投的实际情况。

图2 测区施工现场
2.2 测区无人船测量
在拦沙导堤的抛填位置借助水上无人船进行了水下测量,采用的是南方自由行8.0 数据处理软件,不仅能实现数据的采集、存储、显示、后处理,还能对测深仪设备进行控制和波形数据显示, 动态监控导堤水下形态,及时反馈拦沙导堤的断面形状。无人船具体航线可通过自动模式设置航行间距, 在人工操作模式下可将测区分块航行采集信息。 此次现场作业, 无人船在自动模式下围绕测区拦沙导堤附近进行监测,共测量3 部分区域,如图3。
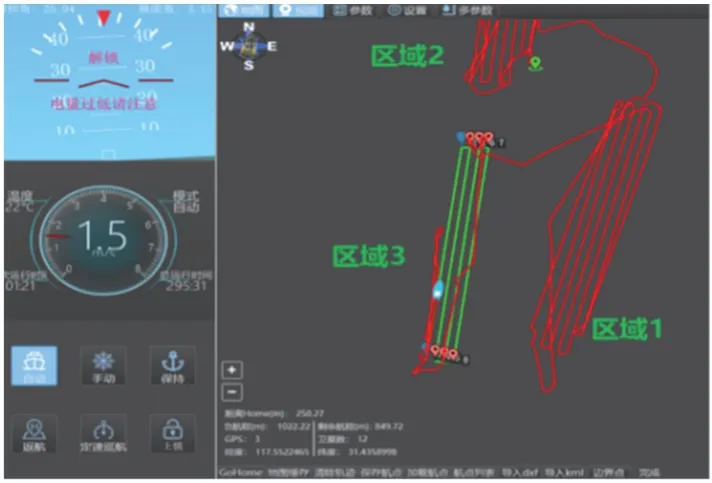
图3 电脑操作监控界面
监测区域位置数据含点名、经度、纬度和水底高程,采用国际WGS84 地心坐标系。其中对应区域1共测量了295 个点位, 大致位置为纬度为31.262°,经度为117.331°, 水底高程变化在2.75~3.60 m 之间,最大高差为0.85 m;对应区域2 共测量了357 个点位,大致位置纬度为31.261°,经度为117.331°,水底高程变化在0.63~3.70 m,最大高差为3.07 m;对应区域3 共测量了234 个点位, 大致位置为纬度为31.260°, 经度为117.330°, 水底高程变化在2.89~3.68 m,最大高差为0.79 m。
3 构建水下地形
3.1 卫图处理
基于南方自由行8.0 测深软件改正处理的离散点数据构建水下地形, 其中水底高程值为水位高程与原始水深之差。 具体将剔除后变幅误差较大的数据点导入至卫图软件(采样数据较多,选取区域一部分采样点示例)如表1,坐标投影选择WGS-84 坐标系经纬度投影,对象类型为点,通过软件矢量标绘在地图上,选取两个路径点勾画路径,采样间距均为5米,形成地形剖面图。
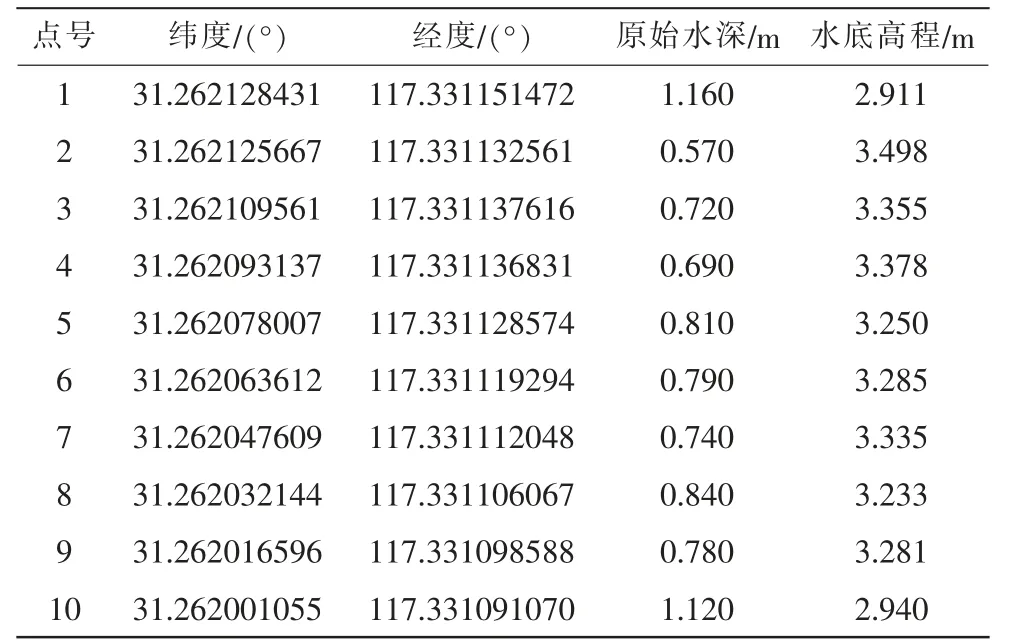
表1 区域1 部分采样点信息表
3.2 地形图绘制
采用Matlab 读取上述离散采样点数据信息,可绘制水下地形图, 能较形象地呈现出某一区域的高低起伏。
图4 为区域1 数据采样离散点水下地形图,能较好反映出整体的水下地形情况,有可以明显看出导堤已进行了一部分抛填,呈山峰状,大致高差为1 m,其他部分凹凸不平反映了测区水下地形存在起伏。针对施工区域设计形态, 结合生成的水下地形图与定位信息, 可指导施工对抛填堤体欠抛与超抛部位的修整。
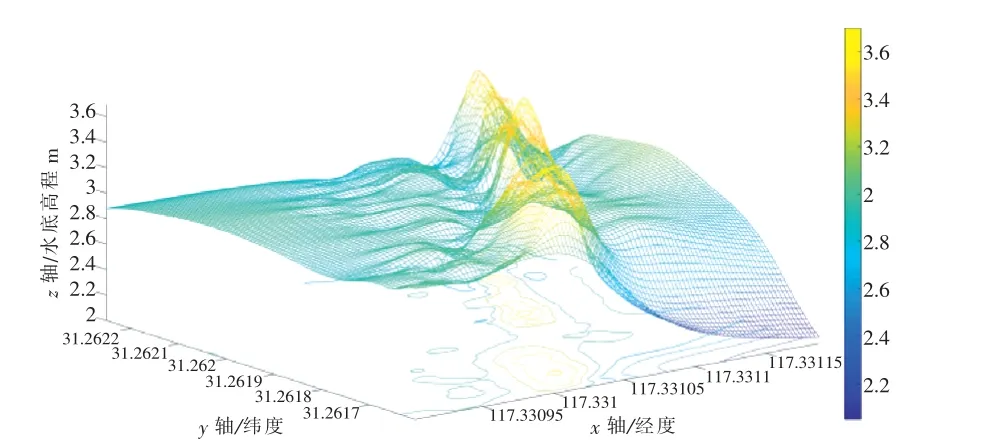
图4 区域1 采样离散点水下地形
4 结语
针对无人船技术在拦沙导堤施工区域完成水下地形勘测的应用问题,基于搭载测深仪和RTK 获取研究区的航向水深数据构建水下地形, 采用卫图软件与Matlab 软件进行处理,两种方法相较,前者可呈现地形剖面图,反映拦沙导堤水下局部抛填状态;后者通过编程可实现呈现测区离散点分布图、 等高线图等,更加形象直观,并能够反映出水下地形整体情况。总体而言,无人船在航道导堤工程的水下地形勘测应用表明, 无人船自动化作业获取的数据信息精度高,可有效地反映测区水下形态。本文的研究可为导堤施工水下地形勘测应用提供参考, 对辅助水下抛填施工,寻找施工欠抛填部位、提高施工质量具有重要意义。
