一种水上智能救援机器人的动力驱动装置结构设计
2024-01-11王国永
王国永,杨 飞
(河北石油职业技术大学,河北 承德 067000)
救生船,又称救生艇,是指设于船上,供船失事时救护乘员用的专用救生小艇。利用划桨、驶帆、动力机等推进,艇内常装有空气箱,使艇在进水后仍有足够浮力以保证艇及艇上人员的安全。海船的救生艇上还备有一定量的淡水、食物和生活用品等。现有技术中的水上智能救援机器人的动力驱动装置,属于救援设备的技术领域。现有技术中,传统的救生艇作为最常见的救援机器人,在救助落水者时,由于救生艇的体积较大,很难高速移动至落水者附近,高速移动的救生艇在速度起来后,由于惯性作用,很难及时停止,这就使得在救生时,需要在离落水者较远时,救生艇就应该减速滑行至落水者身旁,该方法需要消耗较多的时间,对于落水者来说,时间是最宝贵的,动力驱动装置直接关乎着救援的及时性和成功率,因此,设计一种能够实现及时加速和降速的水上智能救援机器人的动力驱动装置是非常必要的。
1 水上智能救援机器人的动力驱动装置结构组成
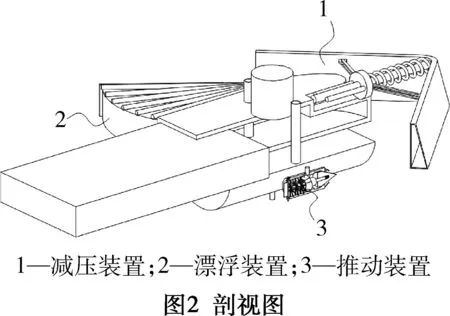
新型水上智能救援机器人的动力驱动装置,包括减压装置、减压装置的外表面活动连接有漂浮装置、漂浮装置的底部设置有推动装置,其组成结构分别如图1~图8所示。


1.1 漂浮装置结构设计
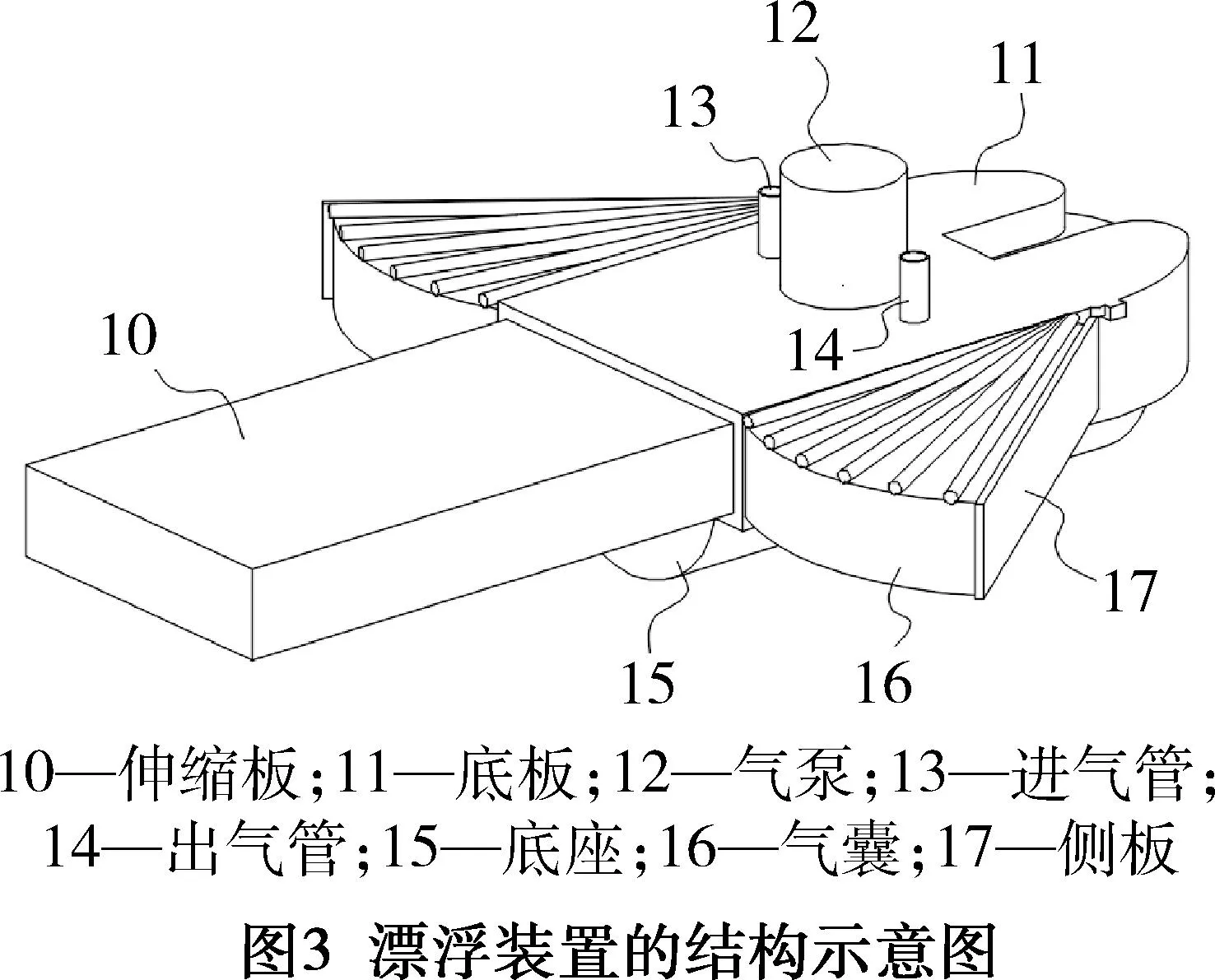
漂浮装置包括伸缩板、伸缩板的外表面滑动连接有底板、底板的上表面固定连接有气泵、气泵的左侧设置有进气管、气泵的右侧设置有出气管、出气管的底部设置有底座、底座的顶部设置有气囊、气囊的外表面固定连接有侧板、侧板的外表面与底板的外表面转动连接,底板的壁中开设有通孔,通孔的底部设置有水管。底板的内部与进气管的内部相连通,底板的内部与出气管的内部相连通,底板为空心结构,通孔开设在底板两侧的壁中。侧板对称安装在底板的两侧,气囊的外表面与底板的外表面固定连接,气囊的内部与通孔的内部相连通。底座的上表面与底板的下表面固定连接,水管顶端的外表面与底座的内表面固定连接,底座的内表面与底板的内部相连通。
1.2 减压装置结构设计
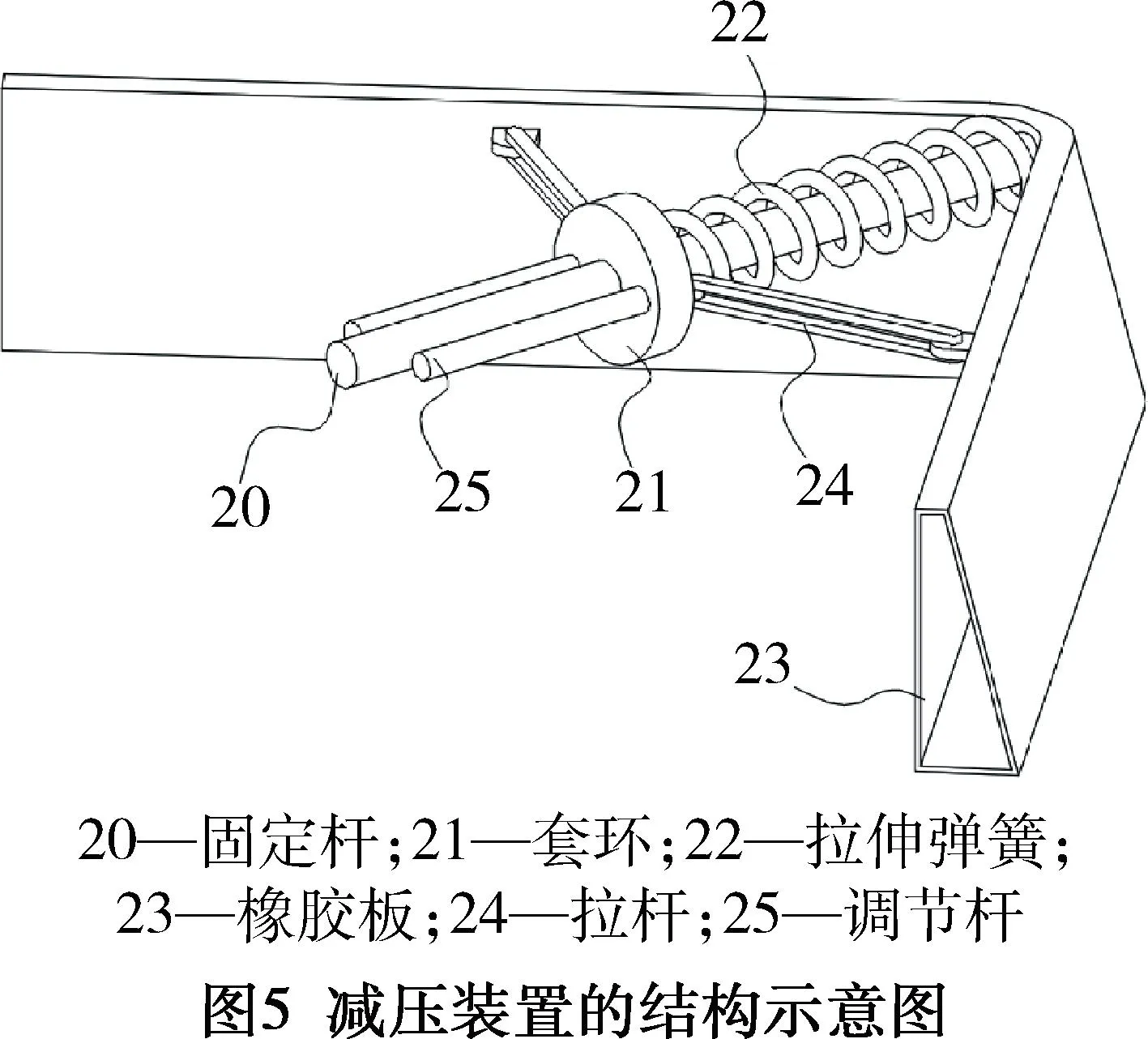
减压装置包括固定杆、固定杆的外表面滑动连接有套环、套环的外表面固定连接有拉伸弹簧、拉伸弹簧的外表面固定连接有橡胶板、橡胶板的外表面转动连接有拉杆、拉杆的外部设置有调节杆。固定杆的外表面与橡胶板的外表面固定连接,拉杆的外表面与套环的外表面转动连接,套环的外表面与调节杆的外表面固定连接,固定杆的外表面与底板的内表面固定连接,拉杆的外表面与底板的内表面相接触。
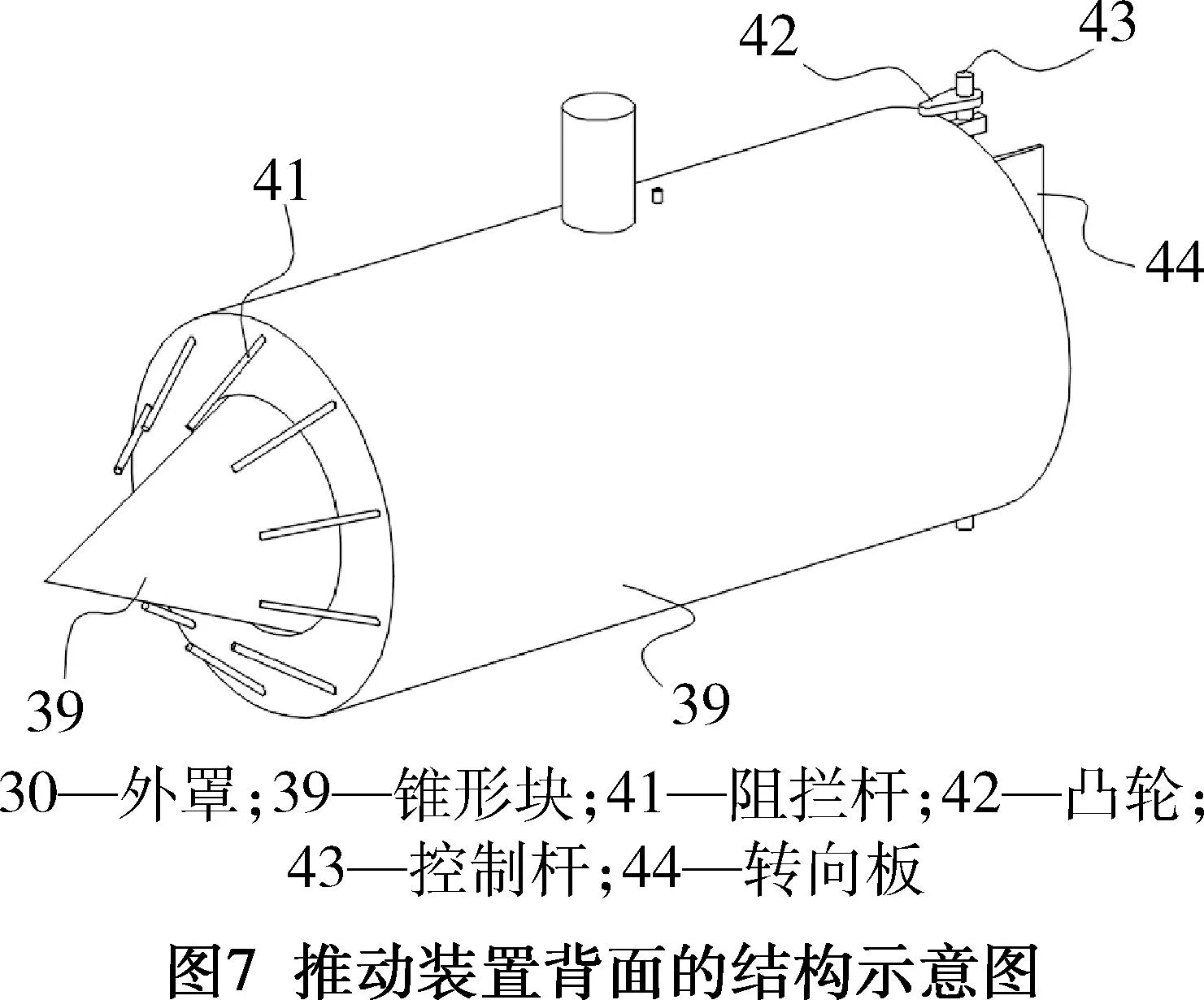
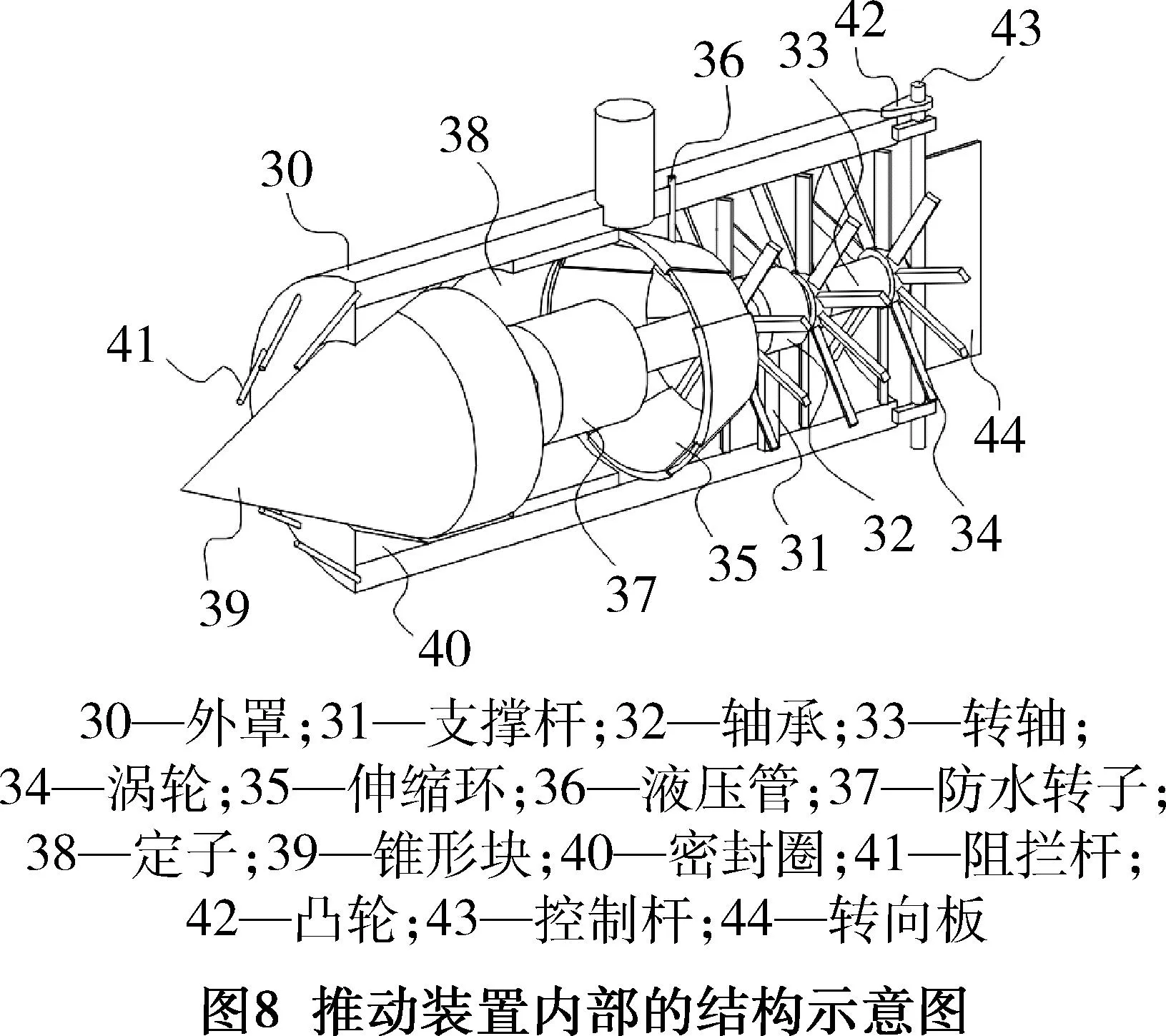
1.3 推动装置结构设计
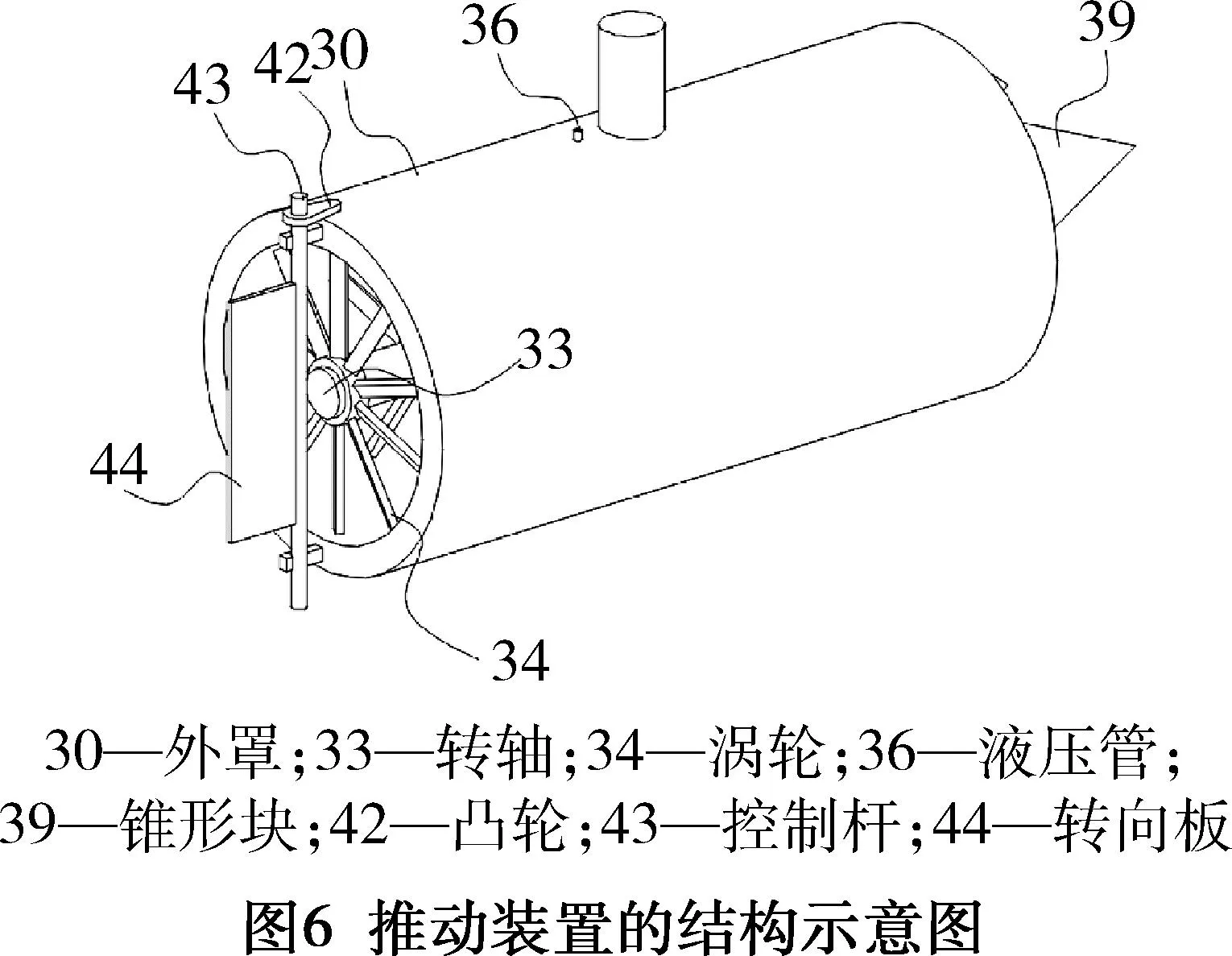
推动装置包括外罩、外罩的内表面固定连接有支撑杆、支撑杆的顶端固定连接有轴承、轴承的内表面固定连接有转轴、转轴的外表面固定连接有涡轮、涡轮的外部设置有伸缩环。伸缩环顶部的外表面固定连接有液压管,液压管的底部设置有防水转子,防水转子的外部设置有定子,定子的外部设置有锥形块,锥形块的外部设置有密封圈,密封圈的外部设置有阻拦杆,阻拦杆的外部设置有凸轮,凸轮的内表面固定连接有控制杆,控制杆的外表面固定连接有转向板。
外罩的上表面与底板的下表面固定连接,外罩的外表面与阻拦杆的外表面固定连接,外罩的内表面与密封圈的外表面固定连接,密封圈的内表面与锥形块的外表面滑动连接,防水转子的内表面与转轴的外表面固定连接。液压管的外表面与外罩的内表面固定连接,定子的外表面与外罩的内表面固定连接,控制杆的外表面与外罩的内表面转动连接,锥形块的内表面与转轴的外表面滑动连接。
2 水上智能救援机器人的动力驱动装置原理和应用
水上智能救援机器人的动力驱动装置在使用时,固定杆固定不动,推动装置推动漂浮装置和安装在漂浮装置外部的减压装置运动,在减压装置向前驱动的过程中,橡胶板的外表面与水面冲击推挤,为了减小船体前方的水压阻力,底板内部的液压系统带动调节杆移动,套环沿着固定杆的外表面滑动,拉伸弹簧伸长,在拉杆的拉动下,橡胶板弯曲,橡胶板与水的接触截面减小,船体前进时受到的压力减小,使得船体能够快速移动至指定位置,缩短落水者的被救援时间,提高生存机率,橡胶板采用空心结构,能够减小设备的自重,增大浮力,橡胶板采用斜面设计,便于水体流动,减小阻力,设备移动至落水者附近时,减压装置迅速张开,通过增大接触面积,增大阻力,船体急停,同时,较大的接触面积有利于船体的稳定性。
漂浮装置处于收缩状态,待设备移动至落水者附近时,气泵通过进气管将外界的空气吸入底板的内部,底板内部的空气通过通孔进入至气囊的内部,气囊膨胀,侧板转动,此时的出气管关闭,水管开启,受气压的推动,伸缩板从底板的内部推出,底座内部的水体在高压气流的推挤下,从水管排出至外界,漂浮装置整体的浮力增大,防止人员移动至底板和伸缩板的上表面时,设备由于自重增大而下沉,可伸缩式结构,增大救援平台面积,设备一次可满足对多人的营救,在设备空载时,漂浮装置处于收缩状态,进气管关闭,出气管开启,气泵将底板内部的空气排出,负压抽吸的作用使得外界的水流通过水管进入底座的内部,增加设备运行时的稳定性。
同时,通过推动装置进行前进和转向,在此过程中,外罩内部的定子与防水转子通电,在电磁感应的作用下,转轴转动,涡轮抽吸外界的水流,支撑杆顶部的轴承防止转轴脱落,受水流的推挤,锥形块回缩至外罩的内部,锥形块的外表面与密封圈的内表面分离,水流从二者的间隙处流动至外罩的内部,阻拦杆防止外部絮状杂质进入,而缠绕住设备内部,液压管通过抽吸伸缩环内部的液压油,使得伸缩环的内径减小,从而增大流经其内部的水流的流速和压力,随后,水流被涡轮二次加速加压,提高船体的速度,在救生船运动的过程中,凸轮转动,带动控制杆外部的转向板转动一定角度,转向板控制排出的水流的方向,从而达到调节船体移动方向的目的。
当设备向落水者移动时,漂浮装置处于收缩状态,待设备移动至落水者附近时,气泵通过进气管将外界的空气吸入底板的内部,底板内部的空气通过通孔进入至气囊的内部,气囊膨胀,侧板转动,此时的出气管关闭,水管开启,受气压的推动,伸缩板从底板的内部推出,底座内部的水体在高压气流的推挤下,从水管排出至外界,漂浮装置整体的浮力增大,防止人员移动至底板和伸缩板的上表面时,设备由于自重增大而下沉,可伸缩式结构,增大救援平台面积,设备一次可满足对多人的营救,在设备空载时,漂浮装置处于收缩状态,进气管关闭,出气管开启,气泵将底板内部的空气排出,负压抽吸的作用使得外界的水流通过水管进入底座的内部,增加设备运行时的稳定性,解决了传统的救援机器人浮力固定,可营救范围有限的问题。
设备通过推动装置进行前进和转向,在此过程中,外罩内部的定子与防水转子通电,在电磁感应的作用下,转轴转动,涡轮抽吸外界的水流,支撑杆顶部的轴承防止转轴脱落,受水流的推挤,锥形块回缩至外罩的内部,锥形块的外表面与密封圈的内表面分离,水流从二者的间隙处流动至外罩的内部,阻拦杆防止外部絮状杂质进入,而缠绕住设备内部,液压管通过抽吸伸缩环内部的液压油,使得伸缩环的内径减小,从而增大流经其内部的水流的流速和压力,随后,水流被涡轮二次加速加压,提高船体的速度,在救生船运动的过程中,凸轮转动,带动控制杆外部的转向板转动一定角度,转向板控制排出的水流的方向,从而达到调节船体移动方向的目的。
3 结论
1)设计了减压装置,当设备使用时,推动装置推动漂浮装置和安装在漂浮装置外部的减压装置运动,橡胶板弯曲,橡胶板与水的接触截面减小,船体前进时受到的压力减小,使得船体能够快速移动至指定位置,缩短落水者的被救援时间,提高生存机率,橡胶板采用空心结构,能够减小设备的自重,增大浮力,橡胶板采用斜面设计,便于水体流动,减小阻力,设备移动至落水者附近时,减压装置迅速张开,通过增大接触面积,增大阻力,船体急停,同时,较大的接触面积有利于船体的稳定性,解决了传统的救生机器船稳定性较差,高速移动时,水体的阻力较大的问题。
2)设计了漂浮装置,当设备向落水者移动时,设备可以由于自重增大而下沉,实现伸缩式结构,增大救援平台面积,设备一次可满足对多人的营救,在设备空载时,漂浮装置处于收缩状态,进气管关闭,出气管开启,气泵将底板内部的空气排出,负压抽吸的作用使得外界的水流通过水管进入底座的内部,增加设备运行时的稳定性,解决了传统的救援机器人浮力固定,可营救范围有限的问题。
3)设计了推动装置,当设备使用时,设备通过推动装置进行前进和转向,并且推动装置能够提高船体的移动速度,在救生船运动的过程中,凸轮转动,带动控制杆外部的转向板转动一定角度,转向板控制排出的水流的方向,从而达到调节船体移动方向的目的。
