基于定时截尾试验的森林防火机器人MTBF 验证方法研究
2024-01-10巩潇梁学修王磊关永瀚余娴
巩潇 梁学修* 王磊 关永瀚 余娴
(中国软件评测中心(工业和信息化部软件与集成电路促进中心),北京,100048)
0 引言
机器人产品的可靠性是非常关键的一个产品指标,主要是指机器人按照规定的条件在约定的时间内,实现约定功能和性能的能力水平[1-3]。关于产品可靠性的研究,最早从武器装备系统开始,经过多年的发展,其涉及的范围已从最初的电子产品系统、硬件系统延伸到机器人等机械电气设备、软件系统等[4-5]。平均故障间隔时间(Mean Time Between Failure,MTBF)是可维修设备的一项关键综合稳定性参数,MTBF 指标越高,某个时期的平均故障时间越短,这也就说明了系统的综合稳定性、可靠性就越好。而对用户而言,如果选择较高可靠性的产品,则其所象征的停机时间和维修费用就相对较低,也能够获得不错的经济效益。所以在军工、通信、宇航以及机器人等领域,可靠性始终是最被关注的重要关键因素之一[6-7]。
1 选择统计方案
本文设计的森林防火机器人原理样机如图1 所示,其结构包括舱体、外壳保护罩、转盘、底座等。
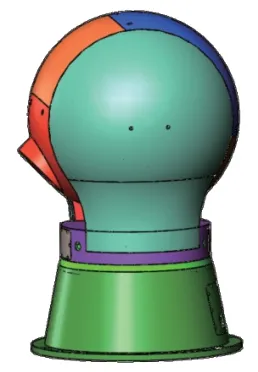
图1 森林防火机器人三维模型图
根据国家军用标准《可靠性鉴定和验收试验》(GJB 899A—2009)[8]表A.6 中的标准型定时试验统计方案简表(图2),中国森林防火机器人可靠性评价测试选用了无替换的标准型定时测试方法方案17。
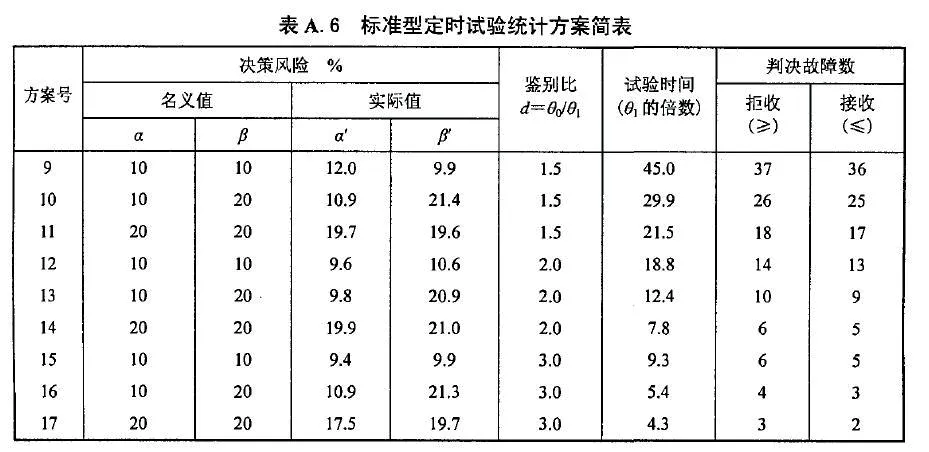
图2 标准型定时试验统计方案简表
2 设定加速试验条件
2.1 温湿度加速试验
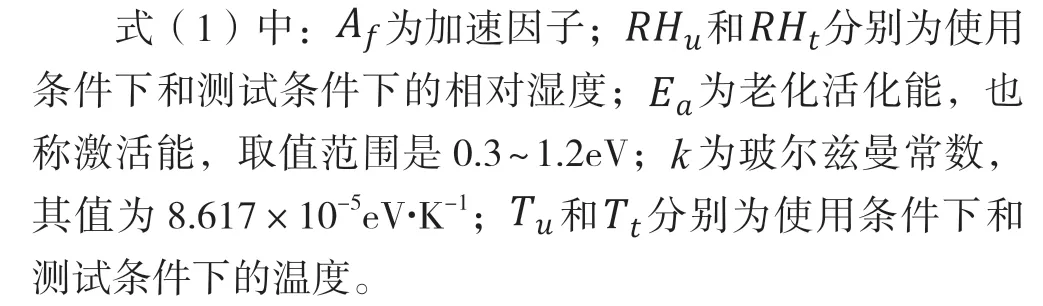
由于森林防火机器人样品主要安装在不同纬度森林环境中,受环境温度、湿度影响较大,因此进行温湿度加速应力试验。试验参考Hallberg-Peck 模型。其中,温度加速因子和湿度加速因子的表达式如下:
2.2 电应力加速试验
由于森林防火机器人产品大多放置于高海拔的森林环境中,受雷击、地区偏远电力不平衡等因素干扰影响很大,高电应力还可能导致设备内发生离子转移、化学物质移动等,从而引起短路、绝缘击穿短路损坏等。设备在压力、流量或频率等的电应力影响下,应力值越大、失效速度越快,则设备寿命也越短,因此可以考虑开展电应力加速试验。电应力加速模型使用Eyring 模型,电应力加速因子的表达式如下:

2.3 试验环境容差
温度、相对湿度、电压应力容差需分别符合以下规定:温度±2℃,湿度±5%RH(相对湿度),电压±1V。
3 故障判定和分类
在试验过程中,出现下列任何一种事件即应判为故障:
1)被试产品或商品中的部分已丧失了一项或几项基本功能;
2)商品或产品的部分性能参数超过商品技术要求中规定的范围;
3)被试产品出现零部件、结构件松动、破碎或损伤等情况。
优先依据森林防火机器人技术的《故障名录及分类》判定故障类别,其次按照国家军用标准《可靠性维修性保障性术语》(GJB 451A—2005)[9]划分为关联故障与非关联故障。非关联故障指已经证实是未按规定的条件使用而引起的故障;或已经证实仅属某项将不采用的设计所引起的故障。否则为关联故障。非责任故障是指非关联故障或事先已经规定不属某个特定组织提供的产品的关联故障。否则为责任故障。
4 故障处理
试验发生故障时,应填写可靠性测试故障记录表及故障分析报告。故障确认后,按下面的程序进行故障处理:
1)停止测试,在试验盒中还原至正常环境状态后,拔出故障产品;
2)产品研发机构与承试机构共同对事故项目进行事故统计分析,按照有关规定,填报事故统计分析报表;
3)在要求对事故进行重现或调查前,承试机构和项目研制机构应当联合开展事故重现或故障调查;
4)在事故原因明确后,对失效的予以维修,修复后,可替换因其它元器件损坏造成应力超过容许最大额定值的元器件,但不得替换能力虽已下降而不超过最大容限的元器件;在替换元器件确有困难后,为保持试验的可靠性,经使用方批准,可暂时替换单元或组件;
5)经维修后恢复至可工作状态的产品,当证明其维修措施有效后,再次投入测试,且将其累计测试日期从出现故障的试验段的零时起记录。
5 故障统计
测试流程中,只有责任故障可以成为判断被测试商品合格与否的重要依据。责任故障应当按照以下的准则加以计算:
1)已确认是因一个问题造成的,间歇故障则只计为一次故障;
2)当可证实多个事故模式由一个因素造成时,该事故计为一个事故;
3)当有许多元器件在测试过程中一起失效时,当无法证实是某个元器件的失效导致了另一部分失效时,则各个元器件的失效合计为一个单独的故障;当可证实是某个元器件的失效导致的另一部分失效时,则全部元器件的失效合计为一个故障;
4)当曾经报告过的、由相同因素所造成的故障,因为还没有真正消除而再次出现时,也应当与曾经报告过的相同故障,合计为一个故障;
5)多次出现于同一地点、同样性质、一样起因的故障,如经研究证实采用改进方法后将不再出现,将多次故障合计为一次故障;
6)在故障检查和维修阶段,如果在被试过程中又出现其它故障且无法判断其是由原有故障造成的,则可将其作为单一的责任事件加以统计;
7)试验时间统计,各个试验样品的有效试验时间之和为总累计试验时间。
6 MTBF 评估
7 结束语
本文以森林消防自动化机器人为实验样本,通过基于定时截尾的试验方法,提供了以环境温度和电应力为基础检验内部应力的MTBF 标准检验方式,并研究了相应的故障诊断、故障处理、故障统计方的设计可靠性水平,进一步明确了其设计可靠性薄弱环节,对于企业选择合适的技术措施提升产品设计可靠性水平,以及进行对相应产品的设计安全性指标检验,有着很大的理论实用价值和借鉴意义。